無人機飛行控制系統設計工程
2017-07-04 03:48:24張劍鋒西安愛生技術集團公司
無人機 2017年12期
張劍鋒 (西安愛生技術集團公司)
無人機飛行控制系統設計是多學科綜合優化的設計過程,是無人機系統軟件實現的理論基礎和設計依據。高品質的飛行控制系統是現代高性能無人機實現安全飛行和完成復雜飛行任務的重要保證,是無人機系統設計技術中不可缺少的重要環節。
近年來隨著航空技術的快速發展,無人機承擔的任務使命逐步增加,飛行控制系統開始向著航空綜合化系統的方向發展,它把飛行控制、火力控制、目標探測、導航系統等綜合,使得這些系統能夠更好的協同工作以完成飛行任務。同時,飛控系統的規模也越來越大,系統結構、功能、行為以及數據交聯關系也越來越復雜,已經發展成為一種涉及機械、電子、液壓和軟件等多個學科的復雜系統。
系統組成及工作原理
飛行控制系統包括飛控計算機和實現飛行控制律的功能軟件,它是無人機自動駕駛儀的重要組成部分,擔負著飛行控制、飛行管理、定位與導航、起降控制、數據鏈設備控制與管理、任務設備控制與管理、機載設備故障診斷與處理等多項重要任務。
自動飛行控制的基本原理是應用自動控制理論中的“反饋控制”理論,而為了滿足飛行安全性和完成飛行任務的目標要求,飛行控制系統完成的基本任務主要有改善飛行品質、協助航跡控制、全自動航跡控制、監控和任務規劃等。
一般來說,無人機的控制系統性能品質和穩定性可以參照有人駕駛飛機的飛行控制系統國家軍用標準的通用規范,如GJB185-86。對不同的飛機,其控制系統的要求也不同,但是實現姿態穩定則是各種飛機自動飛行控制的最基本要求,目前技術條件下無人機主要控制方式有遙控控制、程序控制、人工干預控制等。隨著人工智能技術的進步,無人機未來也可能采用自主控制等,可以根據任務要求進行飛行航跡的智能化規劃和決策。
(左)坐標系與姿態角。
無人機飛行控制系統設計方法
總結飛行控制設計技術的發展歷程可以發現、到目前為止經歷了以文檔為中心和以模型/文檔混合為中心的兩個階段。
(右)數字仿真驗證流程。
以文檔為中心的設計方法
以文檔為中心設計方法是過去相當長一段時間內飛行控制系統設計采用的主要方法,它一方面是指設計過程中各階段的設計成果以文檔形成呈現并在各階段之間傳遞,另一方面也表示該方法中各階段得信息加工處理以手工方式為主,缺乏必要的計算機輔助設計和驗證手段。在傳統的飛行控制系統研制中,設計過程和測試過程相對獨立,設計人員只能等到原理樣機實現后才能對設計方案進行測試和驗證,并根據測試結果返回設計階段進行更改。該方法存在的缺點和不足主要有系統方案表達方式落后、設計建模語言種類繁多,不便于設計人員之間溝通、信息孤島現象嚴重、缺乏有效的仿真驗證手段和快速反應能力等。
以上缺點和不足使得采用傳統設計方法的飛行控制系統研制是一種基于原理樣機的研制,即設計人員只能通過不斷設計、制造原理樣機并基于原理樣機進行各類測試和仿真試驗來完成飛行控制系統研制,由此導致研制周期長、研制費用大。

飛控系統的硬件設備集成度越來越高。
以文檔/模型混合為中心的設計方法
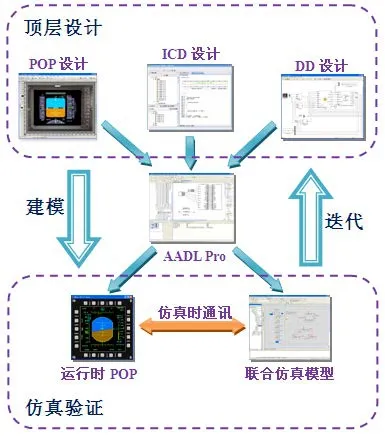
隨著計算機技術和建模仿真技術的飛速發展,各類CAX技術開始出現并由此產生一些新的系統設計理念和方法。如機械系統設計領域的虛擬樣機(VP)技術,控制系統設計領域的Matlab/Simulink技術等。基于文檔/模型的設計方法,可以對設計方案進行充分的分析、測試和評估,消除其中可能存在的歧義和錯誤,避免等到原理樣機實現后才方法這些錯誤再進行修改而造成的損失。飛行控制系統的設計階段和實現階段之間傳遞的不再是非形式化的文檔,而是面向實現的形式化模型,飛控系統設計實現了從以文檔向文檔/模型為中心的轉變。
無人機飛行控制專業發展
機載計算機技術
隨著微電子和計算機技術的發展,國內外無人機機載計算機從功能上經歷著分散、綜合的交替,最終向著綜合化發展;體系結構也根據不同的需求從單余度到五余度不等;處理器也從單片機、DSP、ARM、SOC到X86、POWER PC;總線有1553B、429、485、422、232、CAN等;操作系統有Unix、μC/OS-Ⅱ、DOS、Vx works、Linux等。
伺服與結構技術
國內外中小型無人機絕大多數都使用電動伺服系統。國內目前成熟的無人機伺服舵機大都采用有刷直流電機做驅動源,采用直齒減速器或諧波齒輪減速器作為執行機構,采用電位計做為舵面位置反饋傳感器,采用測速發電機作為速度反饋傳感器,伺服放大器多為模擬控制驅動方式,舵機的實際壽命一般不足2000小時。隨著新技術和新產品的不斷發展,先進電動伺服系統在性能上向高精度、高效率、高可靠性和高適應性發展;在功能上向小型化、輕型化、多功能方向發展。
電氣與保障技術
國外采用電氣多路傳輸技術的自動配電系統已經成熟,并在多種飛機上得到使用。國內中小型無人機采用混合式供電和集中供電兩種方式,自動配電系統的開發與應用技術是中小型無人機供電系統的發展方向。
測量與測試技術
測量專業中,國外元件級敏感器件起步早,智能化、微型化、多傳感器綜合技術成為傳感器發展的趨勢。國內元件級敏感器件發展比較晚,基礎相對比較薄弱。高精度、高可靠性、微型化成為國內敏感器件的主要研究方向,而集成度高、智能化的傳感器網絡也成為近些年傳感器發展的新熱點。
測試專業發展初期以自動化、系統化測試為主。隨著計算機技術和嵌入式技術的發展,測試領域逐漸向便攜式、智能化的方向發展,同時依托專家系統、故障診斷等技術,發展成各式各樣的ATS(智能測試系統)。
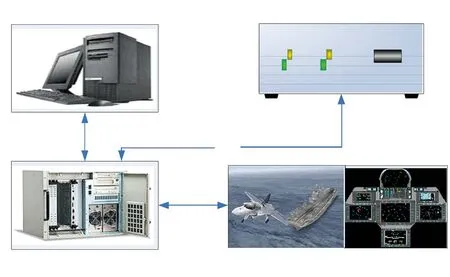
實時仿真系統結構。
無人機飛行控制律設計過程
開發的輸入與輸出
開發輸入包括無人機系統涉及的平臺級和系統級對控制律的需求、飛行器的氣動數據(含鉸鏈力矩數據)、重量特性和慣性特性數據、發動機仿真模型、傳感器以及伺服舵系統模型等。開發輸出包括以Matlab/Simulink形式表述的飛行控制律仿真模型,以及以文檔形式描述的控制律詳細需求和設計結果。
控制律設計方法
控制律的設計方法主要有以下幾種:經典控制方法,包括根軌跡,頻域Bode圖等;現代控制方法,包括極點配置,LQR等;魯棒控制方法,包括H2控制,Hinf,mu控制等;智能控制方法,包括神經網絡,遺傳算法等。在進行控制律設計之前,首先要進行參考坐標系的選擇,這也是控制律設計的基礎。
控制律開發實施過程
開發實施過程首先是對控制律開發的工作分解,即把控制律分解到功能模塊,每個功能模塊有飛控設計人員獨立進行設計需求描述、建模、仿真驗證等。最后全部設計完成的飛行控制律需要在6DOF非線性模型上進仿真驗證,確認設計結果對系統需求表達的正確性、完整性和符合性。飛行控制律開發與實現過程中,要考慮以下幾個問題:氣動數據處理與性能計算、系統建模語言與控制律設計方法、控制律中非線性環節的離散化、控制律切換時刻控制信號的處理、飛行控制律的評估與確認,以及飛行控制軟件架構等。
數字仿真
仿真驗證是設計中必不可少的重要環節,用于驗證設計結果的正確性和有效性,從而及時發現設計中存在的問題,實現快速設計迭代。頂層設計建模和全數字仿真是一個快速循環反復迭代的過程,通過數字仿真的手段,可以有效的保證頂層設計的有效性。
系統驗證
地面仿真驗證是無人機在飛行試驗前的重要環節,充分的地面仿真對型號降低成本、縮短周期、降低飛行風險的價值不可估量。基于高精度飛機模型的仿真系統能夠讓無人機在實驗室中“飛”起來。具體來說地面仿真驗證可以達到如下效果:驗證航電設備之間的接口正確性、功能正確性;驗證飛行控制律設計的正確性;驗證機載軟件實現的正確性與可靠性;考核飛行控制系統的魯棒性;接近真實的飛行操縱模擬與操縱人員的培訓。
一般來說,仿真驗證環境包括如實時仿真機、故障模擬系統、視景顯示系統、模擬器(位置模擬、姿態模擬、高度/速度模擬等)等設備。西安愛生技術集團公司已開發了便攜式、機柜式等系列化的地面仿真驗證系統,并已經廣泛應用在多個無人機型號研制過程中。 ■
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34