乒乓球撿放機械臂結構設計和優化
2017-07-05 10:54:58孟娜,胡俊
山東理工大學學報(自然科學版) 2017年5期
孟 娜,胡 俊
(1.山東理工大學 體育學院, 山東 淄博 255049;2.山東理工大學 機械工程學院, 山東 淄博 255049)
乒乓球撿放機械臂結構設計和優化
孟 娜1,胡 俊2
(1.山東理工大學 體育學院, 山東 淄博 255049;2.山東理工大學 機械工程學院, 山東 淄博 255049)
針對已撿放到球籃中的乒乓球如何進一步投入回收箱的問題,對乒乓球撿放機械臂進行了結構設計和優化.確定了機械臂結構形式,根據回收箱的大小分析了機械臂的運動空間,利用罰函數法和可變多面體搜索法實現了機械臂的結構優化,并采用MATLAB優化工具箱確定了最終尺寸.最后,采用鋁合金材料制造了機械臂,將其安裝在乒乓球撿放機器人樣機上,并進行了20次乒乓球撿放實驗.統計結果表明,機械臂的運動空間能夠滿足設計要求,可以實現乒乓球的準確投放.
乒乓球撿放;機械臂;結構優化;控制系統;
乒乓球作為一種國球運動,越來越受到人們的歡迎.但是在乒乓球訓練過程中,地面會出現大量散落的乒乓球.目前通常采用的人工撿取方式,非常消耗時間和精力,因此設計一款智能乒乓球撿放機器人尤為必要.通過查閱國內外資料發現,多數研究集中在乒乓球擊球機器人、乒乓球運動軌跡預測及擊球策略領域上,例如,Acosta等[1]開發出一種7自由度乒乓球機器人,并考慮了阻力對乒乓球的影響,具有一定的行業應用價值.Miyazaki等[2]開發了雙目視覺乒乓球機器人,并采用專家系統對擊打點進行預測,取得了較好的應用效果.彭博、李志奇等[3-4]根據建立的乒乓球飛行狀態方程和反彈運動模型,采用迭代方法對乒乓球的擊打點進行預測,具有較好的預測精度.而對乒乓球撿放機器人的研究鮮有報道.國內僅廣東工業大學許東偉[5]設計了一款以ARM為主控制器的撿球機器人,并采用風扇的吸力來實現球入球籃,研制的實物模型驗證了該機器人的基本可行性.上述研究成果對本文研究具有很好的借鑒意義.
本文設計一款采用夾持方式撿放乒乓球的機器人,根據乒乓球訓練過程中的特點和要求,撿放到球籃中的乒乓球還需要進一步投放到大號的回收箱中.本文的研究重點是機械臂如何準確地將已撿放到球籃中的乒乓球投入到回收箱中(有關前期收撿散落乒乓球的研究可參看作者的相關論文).因此機械臂結構是設計的重點.
1 機械臂設計及優化
1.1 乒乓球撿放機器人總體結構概述
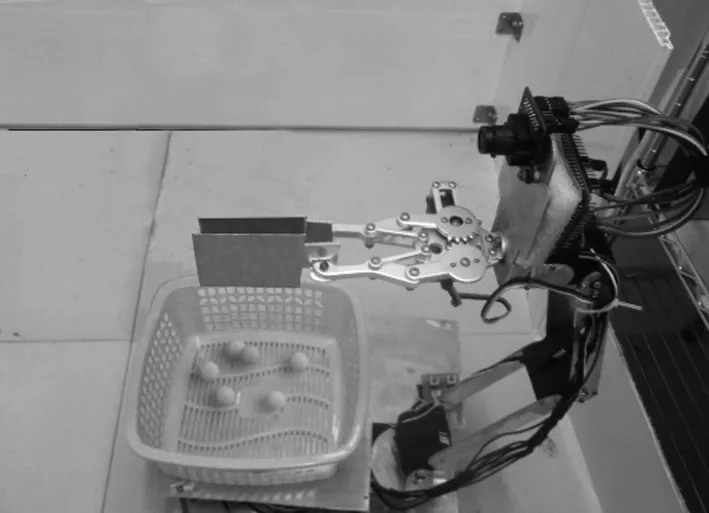
從機械臂運動的準確性和靈活性兩方面考慮,采用三自由度關節式機械臂[6-7],機械臂安裝在輪式小車上,總體結構采用輪式機器人+機械臂+攝像頭的方案.機械臂固定在輪式移動平臺上,機械臂的末端安裝一個攝像頭和夾持機構,用于識別和抓取圓形乒乓球,其總體結構及機械臂如圖1所示.

圖1 乒乓球撿放機器人
1.2 機械臂工作空間分析
機器人的機械臂應具有良好的回轉性和足夠的抓取空間.當移動車體到達目標區域后,通過對機械臂的調整,實現乒乓球的撿放工作,工作環境示意圖如圖2所示.乒乓球回收箱尺寸如圖3所示,寬度w=450mm,深度b=200mm,高度h2=70mm,h3=335mm,h=600mm,因此該機械臂的工作空間為b×w×h的立方體區域.為方便下一步的分析,以機械臂的底座頂面中心o為坐標原點,建立空間直角坐標系o-xyz.
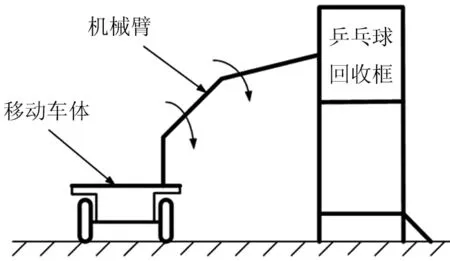
圖2 工作環境示意圖
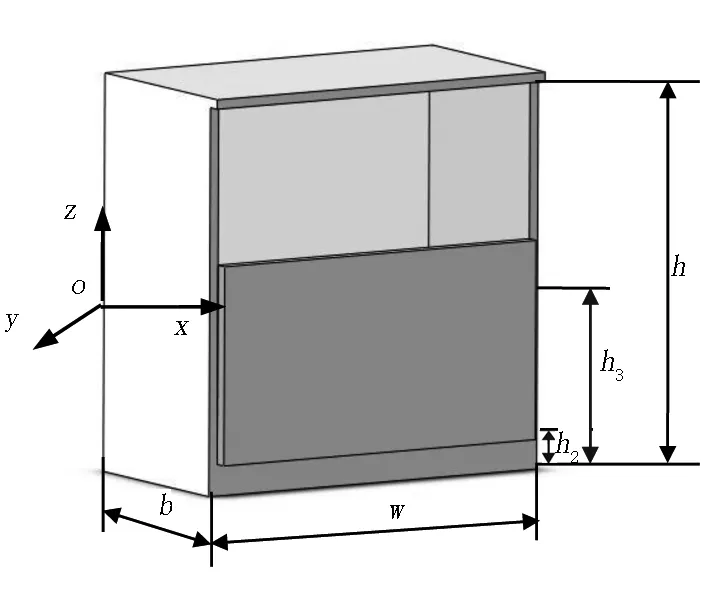
圖3 乒乓球回收框尺寸
平面oxy為工作空間的俯視圖,如圖4所示.只需利用立柱繞z軸回轉某相應角度θ1使機械臂滿足b1×w,即可實現要求的工作空間b×w×h.立柱回轉的最小角度應滿足
(1)
根據式(1),oxy平面優化后的結果如圖5所示,當回收框的長度w=450mm,寬度b=200mm,回收框距機器人立柱距離r=240mm時,機械臂與x軸的最大張角為43.15°,機械壁末端的運動范圍為254.91mm.
機械臂參數工作空間的oxz平面圖如圖6和圖7所示.機械臂放置于小車頂部,機械臂OE、EA的長度分為L1,L2,與x軸的夾角分別α1、α2.目標區域(陰影部分)4個邊界點分別為E1(a,d)、H1(c,d)、F1(a,b)、G1(c,b).
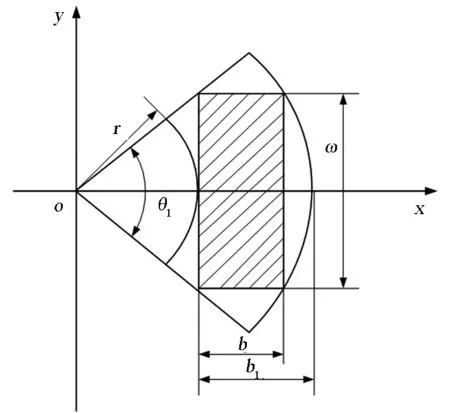
圖4 機械臂優化原理圖
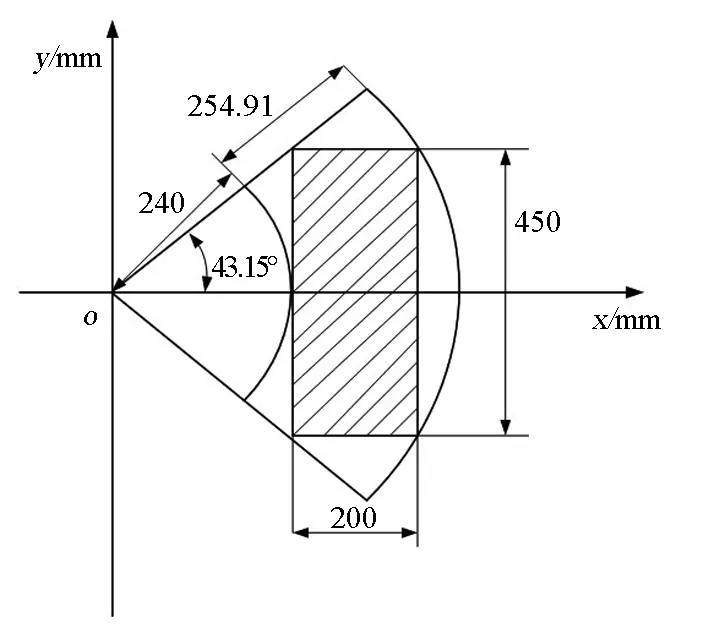
圖5 xoy平面優化結果
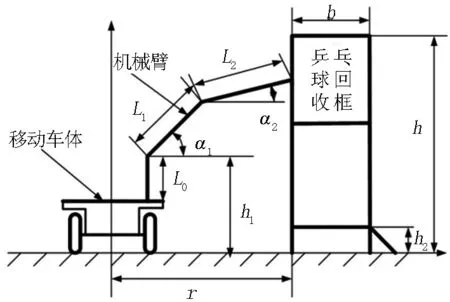
圖6 機械臂參數
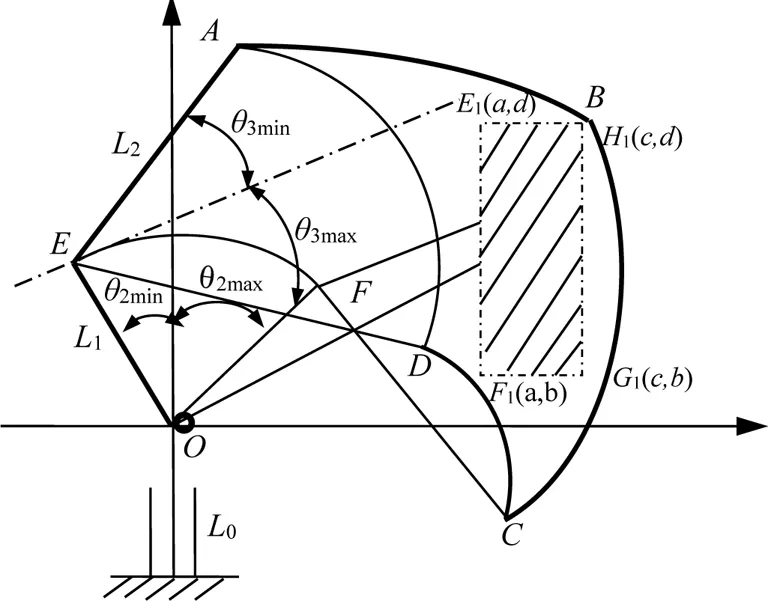
圖7 oxz平面機構參數圖
選取圖7中機械臂末端A實際到達的工作空間所圍的面積SABCDA為目標函數,并使其在包容所求的矩形工作空間(b1×h)條件下為最小值,另
F(X)=minSABCDA
(2)




應使實際工作空間SABCDA包容所要求的矩形工作空間E1F1G1H1(b1×h),將此約束變換為各段圓弧方程的約束條件,其中(x,y)為機械臂末端在各個位置的坐標值.

(x-xE)2+(y-yE)2=L22
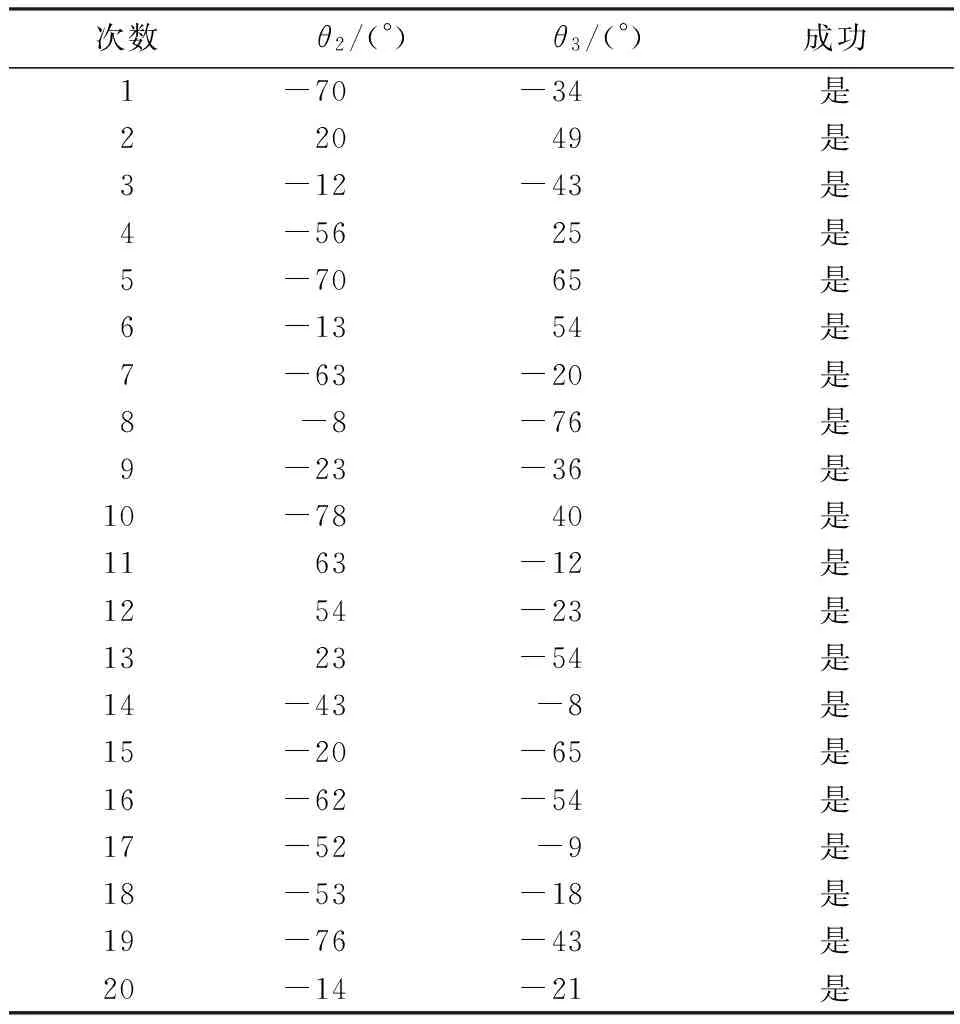
當y=yE時,x=xmax=L2+xE x2+y2=rOD2 x2+y2=rOA2 (x-xF)2+(y-yF)2=L22 此外,還有設計約束變量約束: Ximin≤Xi≤Ximax,i=1,…,6 式中Ximin、Ximax為設計變量的變量區間邊界值. 1.3 機械臂的優化 采用罰函數法及可變多面體搜索法對目標函數進行優化[8],利用MATLAB優化工具箱中的多變量有約束非線性函數fmincon進行最小值求解,函數表達式如下: [x,fval,exitflag,output]=fmincon(fun,x0,A,B,Aeq,Beq,lb,ub,nonlcon) 式中,x為函數fval的最優解,本例中為包含6個參數的設計變量X;exitflag為描述函數求解過程中的有效性參數;output為包含優化信息的參數輸出;fun為目標函數;x0為x的初值;A、B、Aeq、Beq為目標函數的約束條件;lb、ub為變量的上下界;nonlcon為定義的非線性約束,即約束條件中由工作空間確定的不等式方程. 對于本設計,給定工作空間的坐標為a=240 ,b=70,c=440,d=600,變量范圍為 L0: [0 850],L1: [0 1500],L2:[0 1500], θ2min:[-90° 0],θ2max:[0 90°],θ3min:[-90° 0], θ3max:[0 90°],優化結果如圖8所示. 圖8 優化結果 從圖8的優化結果可知,機械臂移動空間完全能覆蓋乒乓球回收框的存放區間,為控制系統的應用奠定了良好的基礎. 根據上述研究內容,對滿地散落的乒乓球進行撿放實驗.首先開發了一款輪式機器人撿放平臺樣機,該樣機包括最小系統電路、電源轉換模塊(24V/5V)、RS485通信模塊、CAN總線數據傳輸模塊和PWM輸出模塊.乒乓球識別采用CMOS傳感器——OV7620,控制系統核心單元采用英飛凌單片機XC164CS[9].利用該芯片完成視頻采集、傳感信號采集,機器人移動等指令.由于鋁合金型材具有密度小、強度高等優點,所以本文采用鋁合金材料,按照前述優化尺寸制造了機械臂,并將其安裝在機器人平臺上. 采用本文設計的機械臂對已收撿到球籃的乒乓球進行投放試驗,抓取和投放乒乓球過程如圖9所示.本文進行了20次乒乓球投放試驗,統計結果見表1. 從乒乓球投放試驗結果可知,機器人投放乒乓球的整個過程中準確、平穩,投放區域能覆蓋回收框,完全滿足應用要求. 表1 機器人投放乒乓球統計表 次數θ2/(°)θ3/(°)成功1-70-34是22049是3-12-43是4-5625是5-7065是6-1354是7-63-20是8-8-76是9-23-36是10-7840是1163-12是1254-23是1323-54是14-43-8是15-20-65是16-62-54是17-52-9是18-53-18是19-76-43是20-14-21是 (a)抓取乒乓球 (b) 放乒乓球入回收箱 圖9 機器人撿放乒乓球實驗 本文針對乒乓球訓練過程中,如何將已收撿到球籃中的乒乓球進一步投放到回收箱的問題, 初步設計了一款機械臂+輪式移動車體+傳感采集模塊的乒乓球撿放機器人,重點對機械臂進行了結構設計和優化,并利用MATAL優化工具箱確定了臂長尺寸和活動空間.最后采用鋁合金型材制造了機械臂,并安裝在乒乓球撿放機器人樣機上進行了若干次的乒乓球投放試驗.投放統計結果表明,該機械臂完全能覆蓋投放區域,取得了較理想的投放效果. [1]ACOSTA L, RODRIGO J J, NEDEZ J A,et al. Ping-pang player prototype[J].IEEE Robotics & Automation Magazine,2003,10(4):44-52. [2] MIYAZAKI F, TAKEUCHI M, MATSUSHIMA M, et al. Realization of table tennis task based on virtual targets[C]//Proceedings of the 2002 IEEE International Conference on Robotics & Automation.Washington:IEEE,2002: 3 844-3 849. [3] 彭博,洪永潮,杜森森,等.乒乓球機器人擊打點的預測方法[J].江南大學學報(自然科學版),2007,6(4):433-436. [4] 李志奇,王濱,劉宏.基于支持向量回歸的乒乓球機器人擊球策略學習方法[J].機器人,2014,36(1):14-20. [5] 許東偉,劉建群.乒乓球撿球機器人的設計與實現[J].機床與液壓,2014,42(3):16-19. [6] 張康潔,王奇志.無跡卡爾曼濾波在旋轉乒乓球軌跡預測中的應用[J].計算機科學,2014,41(1):83-87. [7] 賈芳.乒乓球運動建模與機器人擊球規劃[D].杭州:浙江大學,2011. [8] 王英石,孫雷,劉景泰.基于空間幾何方法的乒乓球機器人最優姿態求取[J].機器人,2014,36(2):203-209. [9]何杰. 基于Infineon16位單片機下CAN總線網絡實現[J].計算機與現代化,2004(4):43-47. (編輯:郝秀清) Structure design and optimization of the ping-pong picking up manipulator MENG Na1, HU Jun2 (1.School of Physical Education, Shandong University of Technology, Zibo 255049, China; 2.School of Mechanical Engineering, Shandong University of Technology, Zibo 255049, China) Aiming at the problems of how to further put the ping-pong balls in the basket into recycling bins, the ping-pong balls picking up manipulator was designed and optimized. Firstly, the structure of the manipulator was determined. According to the size of the recycling bin, the motion space of the manipulator was analyzed. Then, the structure optimization of the manipulator was realized by using the penalty function method and the variable polyhedron search method. And the determination of the final size was realized by using MATLAB optimization toolbox. Finally, the aluminum alloy material was used to manufacture the mechanical arm which was installed on the robot prototype of picking ping-pong balls, and the 20 times ping-pong picking experiments were carried out. Statistical results show that the movement space of the manipulator could meet the design requirements and achieve the accurate delivery of ping-pong balls. ping-pong picking up; manipulator; structure optimization; control system 2016-09-20 山東省自然科學基金項目(ZR2012EEL11);國家體育總局社會科學課題(2063SS14094) 孟娜, 女, ziaver@163.com 1672-6197(2017)05-0042-04 TP27 A





2 實驗

3 結束語
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
當代工人(2020年8期)2020-05-25 09:07:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
科技知識動漫(2016年8期)2016-07-29 20:40:09