平面連桿機構力學特性研究
2017-07-05 13:24:07黃鵬飛
食品與機械 2017年5期
黃鵬飛
(西京學院機械工程學院,陜西 西安 710123)
平面連桿機構力學特性研究
黃鵬飛
(西京學院機械工程學院,陜西 西安 710123)
以機構學原理為基礎,分析了平面連桿機構的運動學特性。通過數(shù)字化建模與動態(tài)仿真技術,建立功能型曲柄—搖桿機構仿真模型,獲得了運動學設計參數(shù)。利用Simulation模塊動態(tài)載荷無縫輸入方式定義有限元模型邊界條件,方便快捷地實現(xiàn)了單個構件和不同組件的應力及形變分析,有效提高了靜力學分析的精度與可靠性。利用模態(tài)分析,計算出了曲柄—搖桿機構在極限位置的固有頻率與振型,并在ANSYS環(huán)境下實現(xiàn)了極限位置處的模態(tài)特性優(yōu)化,機構的抗振性能明顯提高,有效改進了曲柄—搖桿機構的動力學特性。
運動學;連桿機構;靜力學;動態(tài)仿真;有限元
連桿機構是食品加工機械中常用的一種傳動形式。實際應用當中,可通過結構簡單、形式多樣的連桿機構來實現(xiàn)各種不同的運動和動力傳遞[1],例如平面四連桿機構、六連桿機構、空間連桿機構及其演化形式等,均在食品加工機械當中獲得了廣泛應用,典型的如配料機、活塞式制冷壓縮機、碼垛機器人等[2],都是通過采用不同類型的連桿機構來實現(xiàn)其運動傳遞和設計功能。
傳統(tǒng)的連桿機構設計多以解析法為主,在機構學基礎上進行功能分析與設計,這種方法往往涉及大量的公式推導和理論計算,不僅過程繁瑣、難度大,而且工作量大、容易出錯[3]。近年來,隨著計算機輔助設計技術的日益成熟,連桿機構的設計融入了越來越多的現(xiàn)代設計手段,大大提高了連桿機構設計的精度與效率。本試驗綜合運用數(shù)字化建模、有限單元法、機構仿真和動力學優(yōu)化等方法,探索并驗證平面四連桿機構的動態(tài)仿真設計流程,擬為現(xiàn)代設計方法在連桿機構中的應用提供有力支持。
1 機構學分析
1.1 運動特性
平面連桿機構一般由若干個構件通過低副(轉動副或移動副)連接組成,各構件之間以圓柱面或平面相接觸,具有承載能力高、剛性好、耐磨損能力強及制造簡單等特點[4],而且可以通過機構學分析來實現(xiàn)給定的運動規(guī)律或軌跡。
四連桿形式是實際當中應用最為廣泛的平面連桿機構。如圖1所示,為平面曲柄—搖桿機構簡圖,該機構由曲柄AB、連桿BC、搖桿CD及連架桿AD組成,其運動學性能主要取決于四根連桿的長度[5],由機械原理可知,曲柄—搖桿機構應滿足桿長之和條件,即LAB+LAD≤LBC+LCD。根據(jù)矢量封閉原則(LAB+LBC=LCD+LAD),以曲柄AB逆時針轉動為正方向,將各桿件分別在X軸和Y軸上進行投影,得到如式(1)所示的曲柄—搖桿機構位移方程。

圖1 四連桿機構簡圖Figure 1 Schematic diagram of 4-bar mechanism
(1)
式中:
XD、YD——D點坐標;
α1、α1、α1——分別為曲柄、連桿、搖桿與X軸的夾角。
以時間t為變量,對式(1)進行一階求導,可得曲柄-搖桿機構的速度方程,見式(2)。將式(2)對時間t求一階導數(shù),便可得到曲柄-搖桿機構的加速度方程。
(2)
式中:
ω1、ω2、ω3——分別為曲柄、連桿、搖桿的角速度。
1.2 自由度計算
根據(jù)機構學原理,組成機構的各構件之間必須具有確定的相對運動,不能產(chǎn)生相對運動或作無規(guī)則運動的機構難以實現(xiàn)運動的傳遞[4]。要使平面連桿機構按預定軌跡產(chǎn)生運動,其機構自由度必須與原動件數(shù)量相等。
由機械原理可知,對于包含N個構件、PL個低副和PH個高副的平面機構,假定其中1個構件固定(機架),則余下活動構件數(shù)為n=N-1。每個平面構件具有3個自由度,在未組成運動鏈之前共包含3n個自由度;組成運動鏈之后,由于受到2PL+PH個約束限制,則整個運動鏈相對于機架的自由度(即機構自由度)計算方法見式(3)。
F=3n-2PL-PH。
(3)
曲柄-搖桿機構均為低副連接,不包含高副,故可將式(3)簡化為式(4)所示形式進行自由度計算。圖1所示平面四連桿機構共包含3個活動構件、4個轉動副(低副),故其機構自由度計算結果為1,與其主動構件(曲柄)數(shù)目相等,故該機構具有確定運動,符合機構學設計原理。
F′=3n-2PL。
(4)
2 運動學仿真
根據(jù)機構學原理設計一套曲柄—搖桿機構,在Solid Works平臺上建立三維數(shù)字化仿真模型,見圖2。其中,曲柄各構件之間均采用鉸鏈連接,且連架桿處于固定狀態(tài)。各構件建模時要求滿足桿長之和條件,且裝配與運動過程無干涉、碰撞等現(xiàn)象[5]。
在Simulation/motion環(huán)境下對該機構進行運動學仿真,使曲柄以300 r/min的轉速運行,仿真完成后可對該機構在任意時刻和位置的運動學參數(shù)進行檢測。圖3、4分別為B點的線性運動曲線和C點的角運動曲線,由仿真結果可獲得針對某一點所關心的運動學規(guī)律及相關數(shù)據(jù),為平面四連桿機構的軌跡分析和性能設計提供重要依據(jù)。
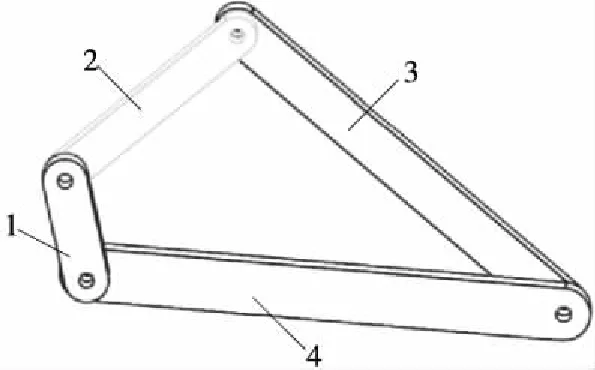
1. 曲柄 2. 連桿 3. 搖桿 4. 連架桿圖2 曲柄-搖桿機構仿真模型Figure 2 Simulation model of crank-rocker mechanism
另外,通過平面連桿機構的數(shù)字化設計與仿真,還可以檢測某一構件的動力學特性,圖5為搖桿角動能特性曲線,當涉及到運動構件的動力學分析時,該仿真曲線能夠替代復雜的角動能計算,為構件的動力學設計、計算提供關鍵數(shù)據(jù)支持,從而有效降低平面連桿機構的動力學設計難度。
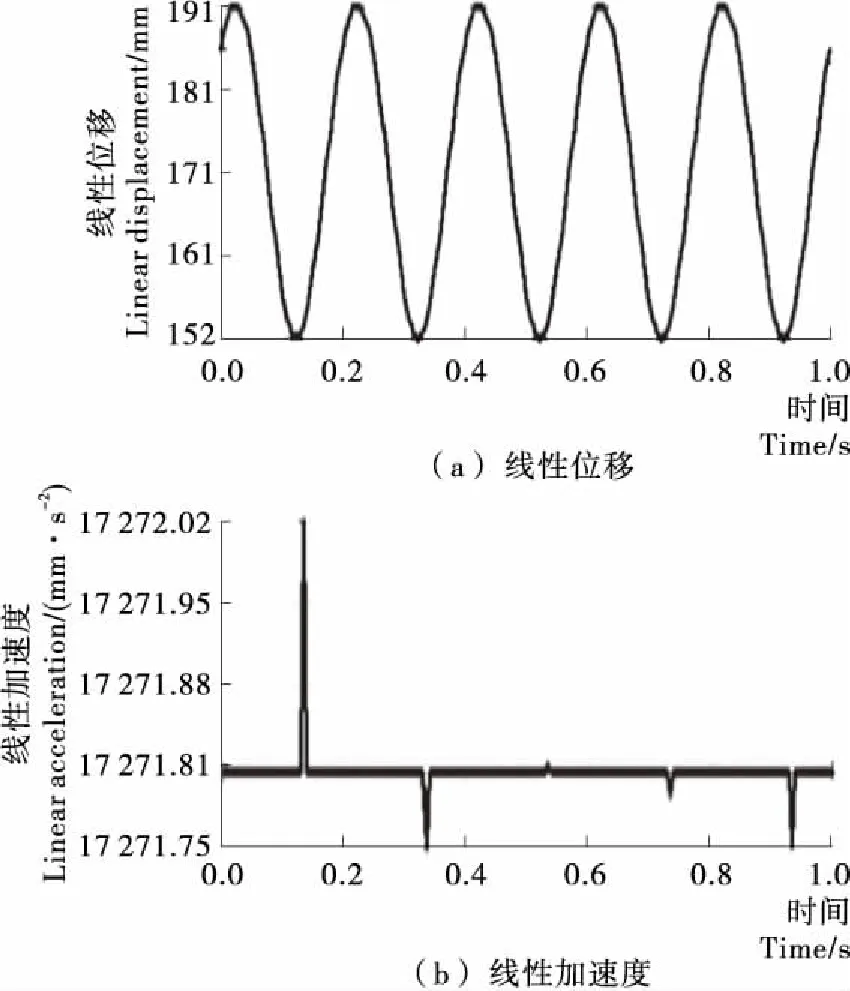
圖3 B點運動參數(shù)仿真曲線Figure 3 Simulation curve of kinematic parameter on point B
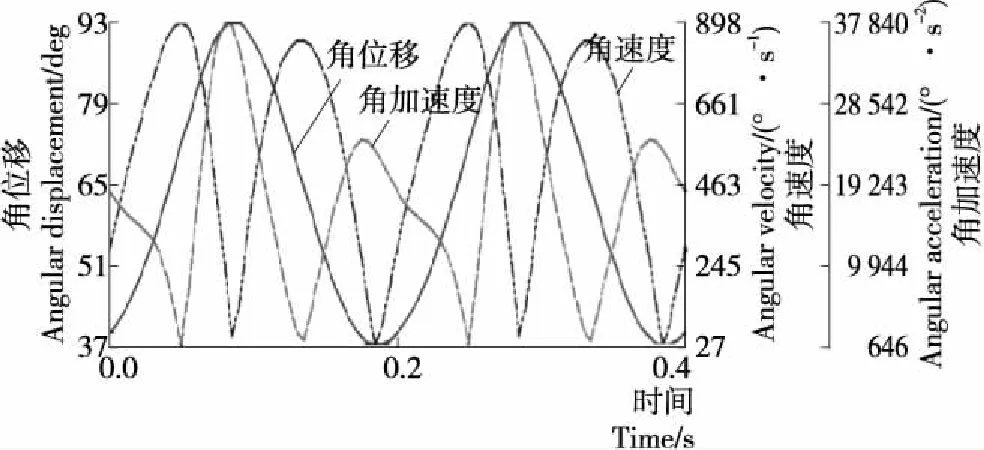
圖4 C點角運動曲線Figure 4 Angular motion curve of point C
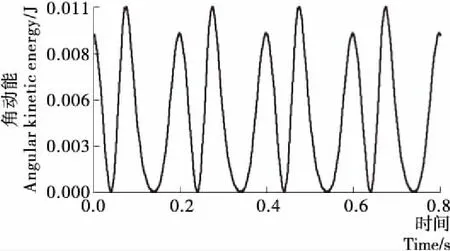
圖5 搖桿角動能Figure 5 Angular kinetic energy of rocker
3 靜動態(tài)性能
3.1 應力與形變
靜力學分析對于平面連桿機構的設計至關重要。利用有限單元法可以計算結構的應力與形變,由于受到邊界條件誤差影響,有限元分析結果一般只能得到近似數(shù)值解[6]。Simulation/motion能夠實現(xiàn)邊界條件數(shù)據(jù)的實時無縫傳遞,即可直接將運動過程中產(chǎn)生的動態(tài)載荷作用于有限元模型,在很大程度上提高了有限元分析的精度和可靠性。
采用實體網(wǎng)格單元進行結構離散建立有限元模型,直接利用運動載荷定義邊界條件進行求解,結果見圖6、7。這種基于運動載荷作用的有限元靜力學分析,可方便、快捷地計算單個構件(圖6)和不同組件(圖7)的應力與形變,不僅有效降低了有限元建模與分析的難度,而且提高了計算效率和精度,為平面連桿機構的靜力學設計提供了重要技術參考。
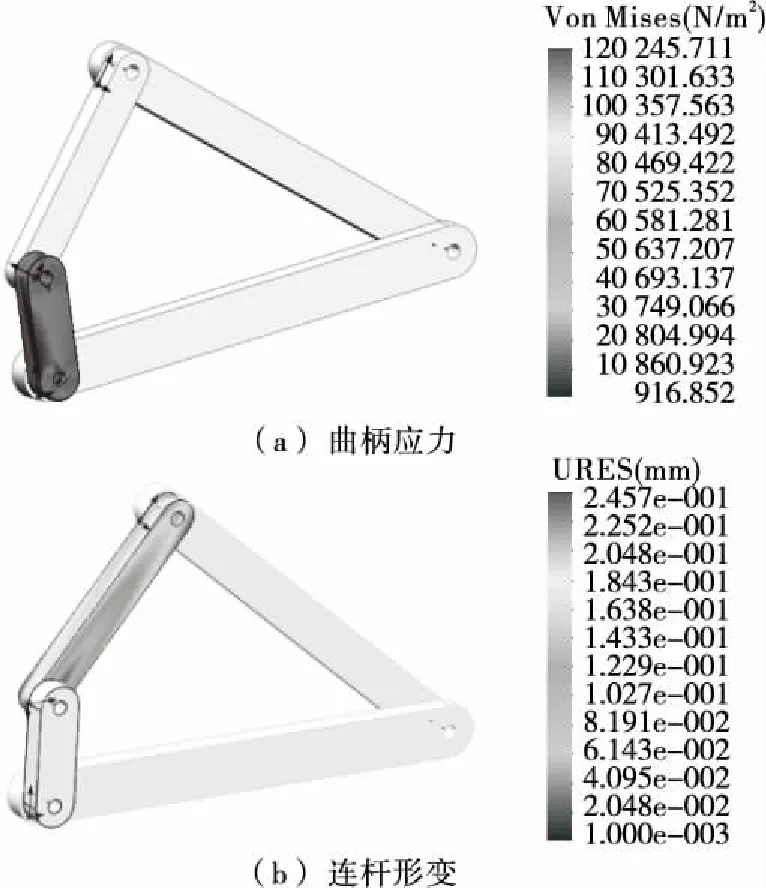
圖6 構件靜力學云圖Figure 6 Statics nephogram of component
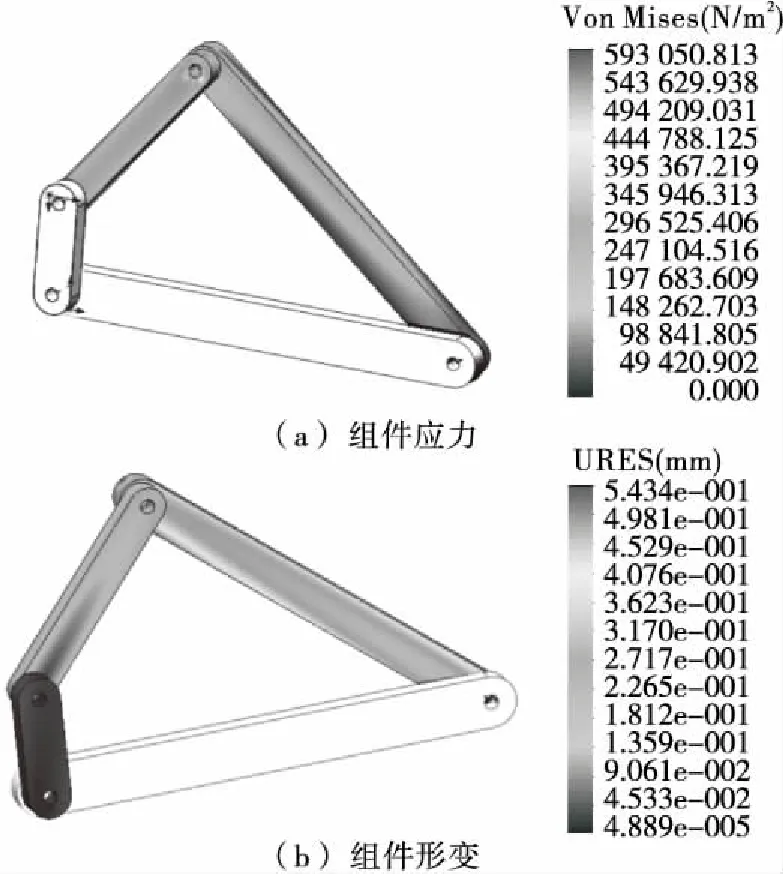
圖7 組件靜力學云圖Figure 7 Statics nephogram of subassembly
3.2 動態(tài)分析及優(yōu)化
曲柄—搖桿機構運行時,曲柄做圓周運動,搖桿隨之進行周期性往復擺動,當曲柄與搖桿處于同一直線時會出現(xiàn)極限位置,也是急回特性的臨界點,此時搖桿會產(chǎn)生一定的慣性力,而且會對曲柄—搖桿機構的運動平衡形成沖擊[7]。當慣性力的激振頻率與四桿機構固有頻率接近或重合時,將會使其發(fā)生劇烈振動,這對于曲柄—搖桿機構的穩(wěn)定性是極為不利的,所以有必要研究極限位置的曲柄—搖桿機構動力學特性。
通過模態(tài)分析計算曲柄—搖桿機構在極限位置處的模態(tài)特性,圖8為搖桿處于極限位置時的1~3階固有頻率和振型。分析可知,曲柄—搖桿機構在極限位置1的振動模式主要表現(xiàn)為各構件的扭轉與彎曲變形,且最為重要的第一階固有頻率(基頻)為1 312.4 Hz。根據(jù)動力學理論,實際當中低階模態(tài)對于結構的動力學特性影響最大[5],為提高該機構的運行穩(wěn)定性,應盡量提高其在極限位置的第一階固有頻率。
將曲柄尺寸作為設計變量,以提高基頻為優(yōu)化目標,通過BEAM3梁單元模擬曲柄-搖桿機構,利用APDL語言編寫參數(shù)化有限元建模與優(yōu)化程序,在ANSYS平臺上對其動力學特性進行優(yōu)化。采用零階算法執(zhí)行優(yōu)化過程,優(yōu)化后的一階振型見圖9,最大形變出現(xiàn)在曲柄與搖桿聯(lián)接區(qū)域,最大形變量約為25.63 mm;一階固有頻率優(yōu)化過程見圖10,分析可知,優(yōu)化后的一階固有頻率為1 408.5 Hz,相對于優(yōu)化前
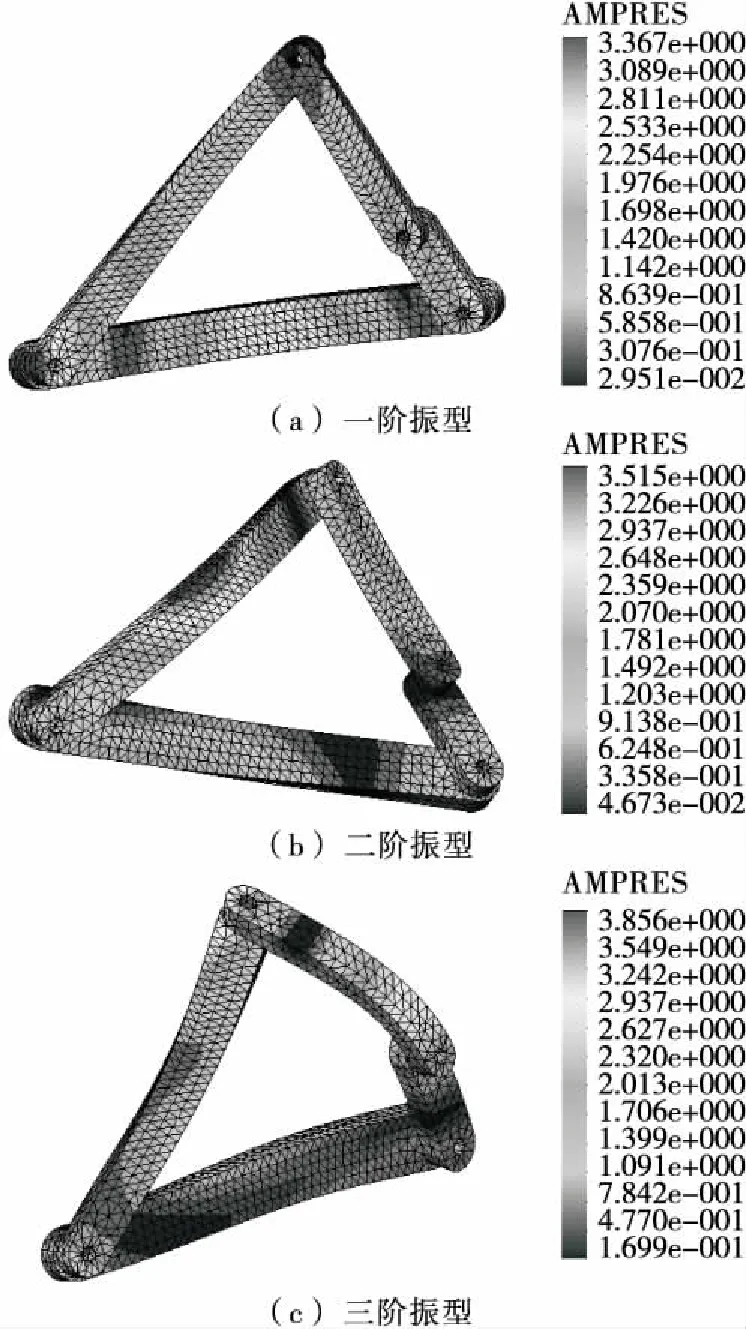
圖8 極限位置振型Figure 8 Vibration mode of limit positon
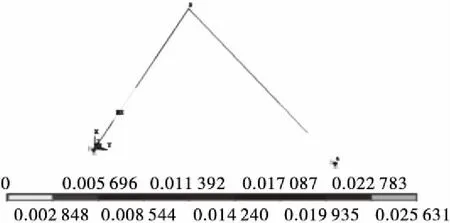
圖9 優(yōu)化后的一階振型Figure 9 First vibration mode after optimizing
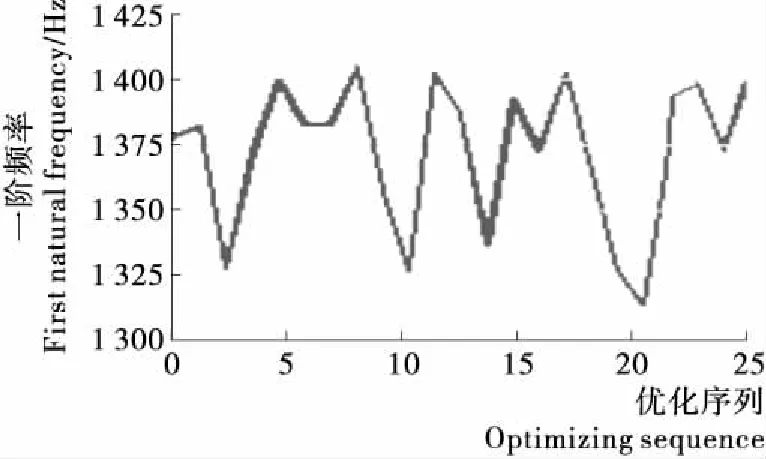
圖10 一階固有頻率優(yōu)化曲線 Figur 10 Optimize curve of first natural frequency
提高了96.1 Hz。由動力學理論可知,基頻越高機構的抗振性能越強,可見,動力學優(yōu)化效果明顯,曲柄—搖桿機構的動態(tài)特性得到了明顯改進。
4 結論
相對于傳統(tǒng)設計方法,以現(xiàn)代CAD/CAE技術為核心的動態(tài)仿真設計在精度和效率方面具有顯著優(yōu)勢。通過曲柄—搖桿機構的運動學仿真、有限元建模、靜動態(tài)特性分析及動力學優(yōu)化,驗證了平面四連桿機構在動態(tài)仿真與優(yōu)化設計方面的思路,實現(xiàn)了曲柄—搖桿機構設計過程的數(shù)字化驅動,有利于增強食品加工機械的設計精度與可塑性,并為同類平面連桿機構的動態(tài)仿真設計提供了重要技術參考。
[1] 潘金坤. 平面連桿機構的6σ穩(wěn)健優(yōu)化設計[J]. 機械傳動, 2011, 35(8): 40-43.
[2] 陳賽克, 凌軒. 基于Solidworks齒輪連桿機構的運動仿真[J]. 食品與機械, 2012, 28(6): 177-179.
[3] 郭惠昕, 岳文輝. 含間隙平面連桿機構運動精度的穩(wěn)健優(yōu)化設計[J]. 機械工程學報, 2012, 48(3): 75-81.
[4] 成大先. 機械設計手冊單行本[M]. 4版. 北京: 化學工業(yè)出版社, 2004: 68-74.
[5] 安培文, 黃茂林. 平面連桿機構的自調及其允差的分析研究[J]. 中國機械工程, 2002, 13(23): 2 040-2 044.
[6] 朱伯芳. 有限單元法原理與應用[M]. 3版. 北京: 中國水利水電出版社, 知識產(chǎn)權出版社, 2009: 112-113.
[7] 劉志剛. 基于MATLAB的曲柄搖桿機構優(yōu)化分析[J]. 食品與機械, 2014, 30(2): 114-117.
Study on mechanical property of planar-lonkage mechanism
HUANGPeng-fei
(CollegeofMechanicalEngineering,XijingUniversity,Xi’an,Shaanxi710123,China)
The kinematics characteristic of planar-linkage mechanism is analyzed based on mechanism theory. Through digital modeling and dynamic simulation technology, a functional simulation model of crank-rocker mechanism is set up, and then the design parameters of kinematic are obtained. Because boundary conditions of the finite element model is defined through seamless input of dynamic loads on Simulation modules, stress and deformation analysis of individual component and different subassembly are realized conveniently, and the accuracy and reliability of the statics analysis is improved effectively. Frequency and vibration mode of the mechanism in limit position are calculated through modal analysis. Besides, modal characteristic of the mechanism in limit position is optimized by ANSYS software, and then dynamic characteristic of the mechanism is improved effectively.
kinematics; link mechanism; statics; dynamic simulat-ion; finite element
西京學院橫向課題資助項目(編號:1610975)
黃鵬飛(1988—),男,西京學院講師,碩士。 E-mail:348131757@qq.com
2017—02—08
10.13652/j.issn.1003-5788.2017.05.026
猜你喜歡
房地產(chǎn)導刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
機械工程師(2015年10期)2015-02-02 01:14:03
機電產(chǎn)品開發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18
