一種光電經緯儀目標仿真訓練系統的研究
2017-07-08 13:25:39胡長德高娟王林旭劉堅強李春燕耿
光學儀器 2017年3期
胡長德+高娟+王林旭+劉堅強+李春燕+耿華芳
摘要: 設計了一種光電經緯儀目標仿真訓練系統。結合光電經緯儀任務情況,按照設備操作、指標測試、維護保養、應急排障和任務流程演練五大模塊,設置了近40個操作科目;研究并確立各類飛行器航跡的建模策略;利用UG和Unity3D實現了經緯儀重要部件的建模和控制;用LabVIEW完成了應急排障模塊的各類故障波形;用Eduis為各科目制作了系統詳盡的多媒體講解視頻;設計了科學合理教學訓練考核評估模型,對學員各種操控技能的訓練結果進行考核評估,并通過單桿實例驗證該系統設計滿足要求。
關鍵詞: 光電經緯儀; 模擬訓練; 目標仿真; VC++; Unity3D; LabVIEW
中圖分類號: TP 274 文獻標志碼: A doi: 10.3969/j.issn.1005-5630.2017.03.014
Study on the system of target simulation training of photoelectric theodolite
HU Changde, GAO Juan, WANG Linxu, LIU Jianqiang, LI Chunyan, GENG Huafang
(Changping College of Non-commissioned Officer, the Academy of Equipment, Beijing 102200, China)
Abstract: The system of target simulation training of photoelectric theodolite is presented.Almost 40 operation courses are set according to five modules,which are equipment operation,parameter testing,maintaining,trouble shooting and task flow.Modeling strategy of several kinds of aircraft track is studied and set.The modeling and controlling of the key parts of photoelectric theodolite are achieved with the software of UG and Unity3D.Then the fault waveform of the equipment failure is completed by the LabVIEW.With the Eduis,the multi-medias of the operation courses are done.Then scientific and reasonable assessment model is studied and set to evaluate the operation of the handler.Finally,it evaluates the training results and it shows the system of target simulation training of photoelectric theodolite meets the requirements.
Keywords: photoeletric theodolite; simulation training; target simulation; VC++; Unity3D; LabVIEW
引 言
光電經緯儀是一種重要的光電跟蹤測量設備,能夠動態、實時地跟蹤目標并用圖像記錄下目標運動軌跡,同時具有測量精度高、所受干擾少、能夠獲取目標輻射特性參數等優點,因而在航空、航天、靶場測
控系統等軍事及科研領域中有著廣泛的應用[1-3]。經緯儀基本的工作過程為操作手拉動單桿使目標進入電視視場,由波門捕獲目標后進入閉環自動跟蹤,其關鍵之處在于對目標的捕獲和跟蹤。現有的光電經緯儀模訓系統基本是對操作手捕獲跟蹤目標能力進行反復訓練,主要用于運動目標軌跡生成和視景仿真[4-5],而對于光電經緯儀組成與工作原理、操作方法和任務流程、故障排查和維護保養等設備相關的系統學習、訓練與考核還屬于空白。本文基于軍隊測控試驗訓練需求,對光電經緯儀目標仿真訓練系統進行了研究設計。在設計過程中,除滿足訓練科目要求外,還借鑒虛擬現實的實現方式,側重于營造逼真的訓練場景,使操作人員產生強烈的真實感,同時也是為了彌補光電經緯儀模擬仿真、訓練考核方面不夠系統全面的不足[6-7]。
1 目標仿真訓練系統的設計與組成
目標仿真訓練系統包括仿真計算機、仿真訓練軟件及顯示監視器等。仿真計算機由其他計算機兼顧(主控計算機或圖像顯示計算機),仿真訓練軟件包括目標仿真模塊(含背景仿真)、仿真操作訓練模塊、仿真測控信息反饋模塊及訓練考核評估模塊等,軟件操作界面友好。要求系統具備實戰任務模擬訓練輔助支持及考核評估功能,參加培訓的學員可通過訓練考核評估軟件選擇參加訓練考核的有關項目,在訓練或考核過程中用計算機收集參試學員的操作信息,并對收到的操作信息按照一定的規則進行評測,完成實際訓練效果的考核評估。
1.1 目標仿真訓練系統組成
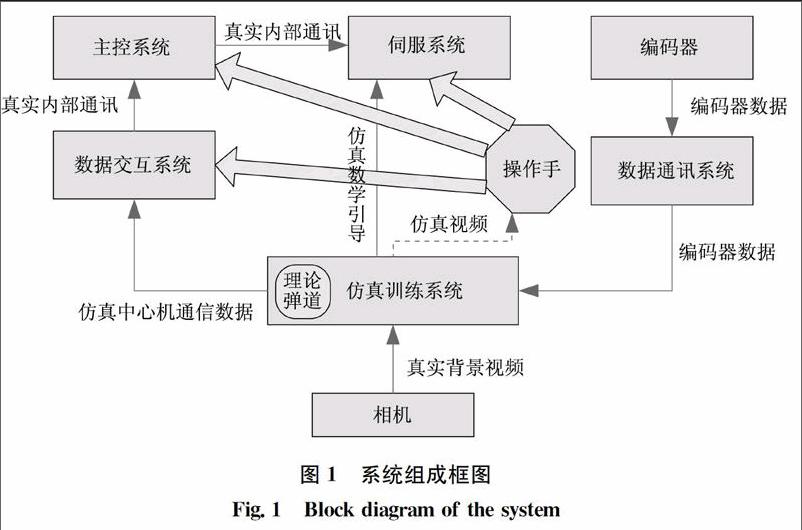
目標仿真訓練系統工作原理:首先通過VIO卡實時采集真實背景圖像,然后由理論彈道(地心系坐標)獲得仿真目標位置信息,與理論彈道(地心系坐標)差分后獲得仿真目標近似姿態信息;目標位置信息、目標姿態信息、目標三維模型、經緯儀實時編碼器值、經緯儀站址坐標、光學系統參數(焦距)及相機參數(像元數、像元尺寸)參與運算后生成目標靶面投影矩陣數據,采用Unity3D處理生成目標仿真圖像,將背景圖像與目標圖像進行疊加融合,生成合成圖像在顯示器上直接輸出,通過VIO卡實時輸出獨立的仿真合成圖像(PAL或SDI格式);同時根據理論彈道信息生成二路仿真數據,一路仿真中心機通信數據送數據交互計算機,另一路仿真數學引導信息送伺服系統,用于記錄仿真訓練時各種自動跟蹤效果,實時存儲訓練過程中經緯儀運轉數據,用于事后分析。在考核模式下,系統記錄所有操作后,對學員關鍵操作點比對后進行評分。仿真訓練系統組成框圖如圖1所示。
1.2 光電經緯儀目標仿真訓練系統軟件結構
軟件體系是由一定形式的結構化元素構成,包括處理構件、數據構件和連接構件。軟件體系結構不僅指定了系統的組織結構和拓撲結構,還顯示了系統需求和構成系統的元素之間的對應關系。分層開發是一種重要的體系結構,有著良好的可擴展性,而且在擴充或修改功能時,基本不會破壞原有結構的穩定性。本系統的軟件體系結構采用層次式結構,分為三層:用戶界面層、業務處理層和數據存儲層,各層之間關系如圖2所示。
1.3 教學訓練考核評估設計
教學訓練考核評估軟件主要針對學員各種操控技能的訓練結果進行考核評估。參加培訓的學員可通過訓練考核評估軟件選擇參加考核的項目,選定項目后進入考核流程,然后學員對選定考核項目進行模擬操作,考核過程中可收集記錄各學員考核操作信息,并對考核操作信息按照一定評判規則進行實時評分。訓練評估分系統是一個對訓練結果進行事后分析處理的系統。評估的主要指標包括:平穩程度、誤差大小、跟蹤段落長短等。這幾項指標在評估中需要綜合考慮,同時還需要兼顧到彈道的難度,比如加速度,速度等。處理的數據源來自于訓練過程中記錄的硬盤文件,通過對理論彈道與實際訓練時的編碼器值進行比較分析得出評估結果[8]。其工作流程如圖3所示。
1.3.1彈道難度參數
彈道難度按下式[9]估計:
式中:Adif為方位彈道難度參數;Edif為俯仰彈道難度參數;Dif為彈道難度參數,∈[0,1];N為彈道點數;υan為方位速度;υamax為方位速度最大值;υen為俯仰速度;υemax為俯仰速度最大值;aan為方位加速度;aamax為方位加速度最大值;aen為俯仰加速度;aemax為俯仰加速度最大值。
1.3.2評分機制
操作誤差按下式[10]評定:
式中:OperDiff為操作誤差參數,∈[0,1];Arm為實際訓練方位值;Atm為理論方位值;Erm為實際訓練俯仰值;Etm為理論俯仰值。操作誤差占整個綜合得分權重為0.5。
平穩程度按下式[10]評定:
式中:StatDiff為平穩程度參數,∈[0,1];A,E為實際方位俯仰值。操作誤差占整個綜合得分權重為0.2。
跟蹤長度按下式[10]計算:
式中:LengDiff為跟蹤長度參數,LengDiff∈[0,1];Tr為跟蹤到目標總時間;T為任務總時間。跟蹤長度參數占整個綜合得分權重為0.3。
綜合打分按下式[10]計算:
式中:Score為綜合打分,Score∈[0,100]。
在實際使用過程中,根據評估的側重點不同,將結合用戶使用需求對評分機制與算法進行適當調整。
2 目標仿真訓練系統的實現
2.1 關鍵技術
2.1.1運動目標仿真模型的建立
1)三維飛行目標建模
本項目用三維造型建模軟件建立三維飛行目標模型,然后從三維圖形數據文件中讀取模型數據并在OpenGL中繪制運動目標[9]。使用3DS MAX 8.0制作了導彈的三維模型,建好后的模型保存為Wavefront(.obj)格式,應用軟件讀取該格式文件,就會生成一個包括全部節點坐標、材質、紋理坐標和顯示列表等元素的數據列表。在OpenGL程序中讀取模型參數,并進行重繪,重繪的模型圖像可以較好地再現3DS MAX軟件所構建的三維模型。
2)飛行軌跡擬合的二次插值算法
讀取接收的經緯儀方位及俯仰角數據,進行坐標變換。打開目標航跡文件,讀取一條目標航跡數據,依據讀取的極坐標數據(距離ρ、方位角α、俯仰角β)變換為相應的直角坐標數據(x、y、z),讀取地上面建立的導彈模型數據,根據直角坐標數據定位導彈模型到當前的空間坐標系中。
極坐標轉換為直角坐標的公式為:
航跡文本文件中包含的是航跡上一系列的離散的點(點與點的時間間隔可設定)。如果模擬的導彈按這些離散點航跡進行飛行,將會出現抖動現象。為使模擬導彈飛行過程更加逼真,飛行效果更理想,需對這一系列點進行插值,本項目對飛行軌跡的三維坐標采用拉格朗日二次插值算法進行插值,插值后的航跡如圖4所示。
具體算法如下:構建空間x坐標的時間函數x=f(t),然后從航跡文件中讀取3個插值結點xk-1、xk、xk+1,對應的時刻分別為tk-1、tk、tk+1,構造3個插值基本多項式:
則插值公式為:
程序中對飛行過程的模擬采用循環刷新的方式進行,每次刷新時將當時的飛行時間t代入式(10),則可求出對應的插值點x坐標值P(x)。同理,對y、z坐標采用相同的算法進行插值,可得到相應插值點y坐標值P(y)、z坐標值P(z)。
OpenGL中就可通過函數glTranslatef(x,y,z)來控制目標的空間飛行位置。
2.1.2
3D建模與控制
Unity3D是虛擬現實軟件的后起之秀,跟DirectX和OpenGL相比,該軟件對圖形渲染管道進行了高度的優化,即使是比較低端的硬件,也可以流暢地運行漫游展示、虛擬仿真、交互式動畫等等,并能夠創造出高質量3D仿真系統和真實視覺效果[11]。并且Unity3D起步就定位為多平臺高端大型游戲開發引擎,能夠與HTML、Flash等進行良好的交互,并支持C#、JavaScript等多種腳本語言。因此,基于Unity3D進行三維展示、虛擬漫游和仿真已成為當前進行虛擬仿真訓練系統開發的首選軟件。經過對光電經緯儀的模擬仿真訓練控制的深入分析研究,最終采用Unity3D軟件實現,編程語言主要通過C#實現,整體框架采用了二維界面控制與三維模型控制疊加結合的方式。光電經緯儀仿真訓練的二維界面控制主要就是基于Unity3D中的NGUI控件完成的,編程語言同樣選擇了C#,主要實現了以下三方面的內容:實現各分系統中的按鈕控制、三維模型控制、選項控制及評分。
2.1.3應急排障的實現
本項目“應急排障”模塊就是基于LabVIEW可視化編程軟件實現的,學員在訓練考核時,可根據故障現象選擇相應的測試點,根據測試波形分析故障原因,培養學員分析問題解決問題的能力,其中所有科目測試波形即為LabVIEW編程所得。
2.2 目標仿真訓練考核系統
光電經緯儀模擬訓練考核評估系統是通過設置多種形式的操作科目,訓練學員掌握光電設備的各種操控技能。參加培訓的學員可通過訓練考核評估軟件選擇參加訓練考核的項目,選定項目后進入訓練考核流程,學員根據要求對選定的科目進行操作。考核過程中該系統可收集記錄各學員訓練考核操作的相關信息,并對學員的操作按照一定評判規則進行實時評分。該系統的操作科目主要根據試驗靶場光電設備的主要操作而設置的,學員通過科目訓練,可以有效訓練士官學員的操作能力,為學員后續崗位任職打下良好的技術基礎。
操作科目主要分為設備操作、指標測試、維護保養、應急排障和任務流程演練五大模塊,近40個操作科目。基本涵蓋了光電測量人員在試驗任務中保持設備工作狀態和圓滿完成任務的基本內容。每一個操作科目都包含操作要求、操作要點和操作時間等內容。同時,為了更好地服務教學,增加學員學習的積極性,為科目配備了相關學習視頻和三維動畫演示操作。
該系統在Windows 7中文版操作系統環境中,采用Visual C++ 6.0、UG、Eduis、Unity3D、VS2010、DirectX 3D編程,應用LabVIEW 2012和數據庫等技術,模塊化編程,建立圖形化人機交互界面,充分考慮到可擴充性及可維護性。該系統支持以管理員和學員兩種身份進行登陸:管理員可以根據試驗任務模式和設備更新實時對操作科目進行添加、刪除和修改,使操作科目能夠貼近部隊,貼近實戰;學員依據操作科目進行訓練和自我考核。該系統考核模式共分為訓練和考核兩種模式:訓練模式主要用于學員進行訓練,查找不足和問題;考核模式下,系統具有自動組卷、指定考題、打印試卷和評分表等功能。
3 單桿跟蹤實例
在光電設備參加試驗任務過程中,設備操作手利用單桿對目標進行捕獲跟蹤。單桿半自動跟蹤是一種非常重要的跟蹤方式,操作手需要通過日常的跟蹤訓練,提高操作技能和應急處置能力,鍛煉自己的心理素質,以便在任務實施中,能夠迅速捕獲和穩定跟蹤被測目標。為了查找不足,提高操作水平,操作手在訓練過程中,需要對每一次的訓練進行考核評估,認真查找訓練中存在的不足,總結跟蹤經驗,修改跟蹤策略,逐步地提高自身的操作能力。
單桿半自動跟蹤要求操作手能夠迅速捕獲目標,然后利用操作單桿對目標進行平穩跟蹤,并且盡量使目標成像在視場中心。因此,在考核評估這個環節,重點考察操作手捕獲目標的靈敏程度、跟蹤目標的平穩性和目標是否在視場中心。
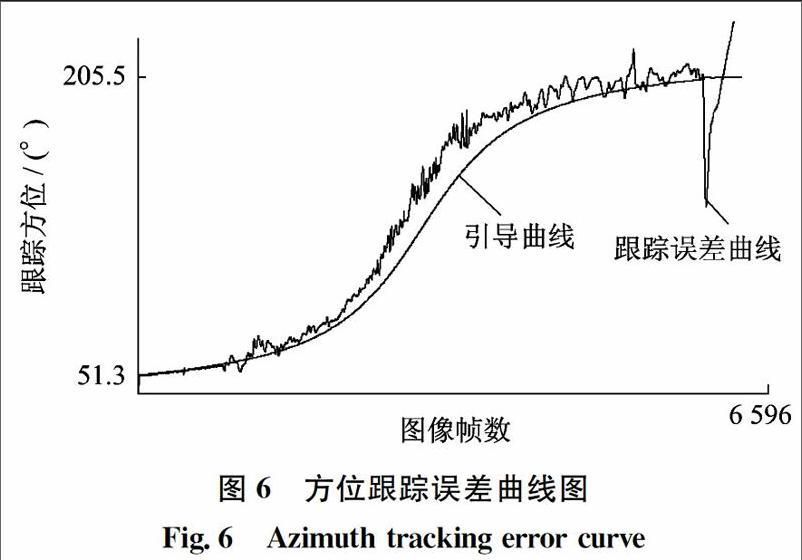
此次模擬彈道包括目標起飛和拐彎等關鍵事件。以下對某學員一次訓練情況進行考核評估,按照評分規則,系統給出最后得分為70.3,評估結果為此學員在目標軌跡突然變化時跟蹤不平穩。圖5為跟蹤畫面圖,下面我們根據學員跟蹤目標的數據進行分析。
1)目標方位跟蹤分析
跟蹤飛機方位跟蹤誤差曲線如圖6所示,隨著目標運動速度增大,其方位角度變化較大,目標脫靶量逐漸變大,說明學員在目標軌跡變化比較劇烈時,跟蹤目標不太平穩。
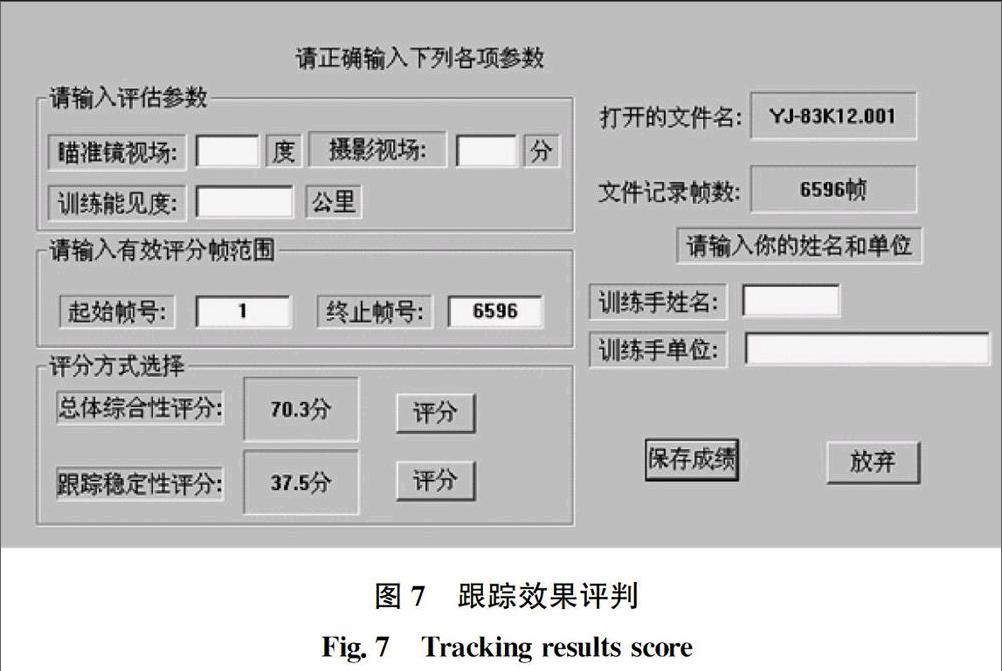
2)跟蹤效果評判
根據學員跟蹤的穩定性、跟蹤時長及難度進行評分,如圖7所示。從數據顯示來看,考核評估系統給出學員的考核成績和訓練評估情況是符合學員訓練水平的。
4 結束語
設計了一種光電經緯儀目標仿真訓練系統。采用虛擬現實技術對目標、背景和彈道進行了建模,綜合考慮目標的運動性,包括軌跡、速度、姿態及其相互關系,實現了不同類型目標的逼真模擬;分析了運動目標仿真模型和彈道難度參數,設計了基于運動目標航跡和彈道難度參數的評估模型;利用UG和Unity3D實現了經緯儀重要部件的建模和交互式控制;利用LabVIEW可視化程序語言,實現了故障的再現及排障過程的模擬,解決了部分故障無法復現的難題。
參考文獻:
[1] 龔錦龍.光電經緯儀仿真訓練系統的設計與實現[D].成都:電子科技大學,2007.
[2] 鄭華強.光電經緯儀模擬器的實時視頻處理系統研制[D].重慶:重慶大學,2010.
[3] 閆志明,程波,邱揚剛.一種光電經緯儀虛擬目標仿真方法研究[J].計算機仿真,2013,30(2):383387.
[4] 劉亮.某型裝備模擬訓練系統研究與設計[D].武漢:華中科技大學,2010.
[5] 熊帥.光電經緯儀虛擬現實仿真平臺設計及關鍵技術研究[D].成都:中國科學院研究生院(光電技術研究所),2013.
[6] 王習文.光電經緯儀跟蹤飛機的3D計算機視覺研究[D].長春:中國科學院研究生院(長春光學精密機械與物理研究所),2010.
[7] 肖婧.圖像跟蹤器測試評估系統的虛擬仿真環境研究與實現[D].西安:西安電子科技大學,2009.
[8] 張勇,吳欽章.基于OpenGL的目標序列影像姿態仿真方法研究[J].系統仿真學報,2010,22(2):439442.
[9] 于正林,譚微,姜濤.基于視景仿真的光電經緯儀模擬訓練器[J].吉林大學學報(工學版),2011,41(2):509513.
[10] 高策,王成龍.光電經緯儀目標仿真訓練分系統[R].中國科學院長春光學精密機械與物理研究所,2014:9193.
[11] 韓意,孫華燕,李迎春,等.基于OpenGL的空間目標圖像生成方法[J].計算機仿真,2010,27(6):267270.