幾何估算和RSSI相結(jié)合的室內(nèi)定位算法
2017-07-10 10:27:27曹廣成
計(jì)算機(jī)應(yīng)用與軟件 2017年6期
徐 馳 邱 添 曹廣成
1(上海應(yīng)用技術(shù)大學(xué) 上海 201418)2(上海京頤科技股份有限公司 上海 200240)
幾何估算和RSSI相結(jié)合的室內(nèi)定位算法
徐 馳1邱 添2曹廣成1
1(上海應(yīng)用技術(shù)大學(xué) 上海 201418)2(上海京頤科技股份有限公司 上海 200240)
提出一種基于幾何估算和RSSI相結(jié)合的定位方法。方法中,未知節(jié)點(diǎn)的位置可以通過(guò)參考節(jié)點(diǎn)的通信范圍進(jìn)行幾何估算。參考節(jié)點(diǎn)的通信重疊區(qū)域可以估算出未知節(jié)點(diǎn)位置。在幾何估算方法的基礎(chǔ)上又引入了RSSI值優(yōu)化。利用RSSI值對(duì)幾何估算區(qū)域進(jìn)行劃分,運(yùn)用改進(jìn)公式計(jì)算出新的未知節(jié)點(diǎn)位置。實(shí)驗(yàn)結(jié)果表明,該方案優(yōu)于基礎(chǔ)定位算法,擁有較高的精度。同時(shí)在醫(yī)院場(chǎng)景進(jìn)行了初步系統(tǒng)測(cè)試,獲得了良好的定位效果。
幾何估算 接收信號(hào)強(qiáng)度 室內(nèi)定位
0 引 言
近年來(lái),硬件技術(shù)的發(fā)展促使微型化傳感器設(shè)備通信能力的提升。無(wú)線傳感網(wǎng)絡(luò)是由大量的無(wú)線傳感器對(duì)空間進(jìn)行數(shù)據(jù)檢測(cè)、信息收集。因此,無(wú)線傳感網(wǎng)可以進(jìn)行實(shí)時(shí)數(shù)據(jù)采集、分析、監(jiān)控和即時(shí)響應(yīng)時(shí)間。由于上述優(yōu)勢(shì),無(wú)線傳感網(wǎng)成為了目前一個(gè)非常活躍的研究課題,在諸如醫(yī)療、工業(yè)、樓宇自動(dòng)化、環(huán)境監(jiān)測(cè)和商品位置跟蹤等領(lǐng)域廣泛運(yùn)用。節(jié)點(diǎn)定位是無(wú)線傳感網(wǎng)絡(luò)中最重要的問(wèn)題之一。因?yàn)槲恢眯畔⒃谠S多基于位置的服務(wù)和應(yīng)用中扮演重要的角色。例如,當(dāng)火災(zāi)或者搶劫事件發(fā)生在無(wú)線傳感器網(wǎng)絡(luò)環(huán)境中,為了處理此事件,可能需要知道處理此事件傳感器節(jié)點(diǎn)的位置。GPS是非常有用的定位技術(shù)。但是在很多情況下,由于節(jié)點(diǎn)的便捷性與能耗無(wú)法用GPS和其他定位儀器滿(mǎn)足所有情況。因此,如何在不使用GPS技術(shù)的情況下解決傳感器位置問(wèn)題變得非常重要。
為了有效解決室內(nèi)定位這一難題,各種新型室內(nèi)定位技術(shù)層出不窮。如藍(lán)牙定位技術(shù)(谷歌方案)、紅外定位技術(shù)[1]、地磁定位技術(shù)[2](IndoorAtlas方案)、UWB定位技術(shù)[3]、3G/4G信號(hào)定位技術(shù)[4](Qubulus方案)、WiFi定位技術(shù)[5]、LiFi定位技術(shù)[6]、WiMax定位技術(shù)[7]、ZigBee定位技術(shù)[8]等。其中藍(lán)牙[9]、WiFi、ZigBee[10]等技術(shù)應(yīng)用最為廣泛,地磁、LiFi等技術(shù)是異軍突起的新技術(shù)。為了降低硬件成本,進(jìn)而提出了基于非測(cè)距的定位。其無(wú)需專(zhuān)用測(cè)距、測(cè)角度的硬件設(shè)施與基于測(cè)距的定位相比成本更低、復(fù)雜度更小。但是目前大多數(shù)的基于非測(cè)距的定位仍然成本高且定位精度偏低。
本文提出了一種基于幾何估算和RSSI相結(jié)合的定位算法,利用參考節(jié)點(diǎn)幾何估算方案[11]的幾何測(cè)算,RSSI值方案的距離計(jì)算,綜合考量環(huán)境等多種因素,從而實(shí)現(xiàn)高精度的室內(nèi)定位系統(tǒng)。需要事先設(shè)定參考節(jié)點(diǎn)與未知節(jié)點(diǎn)的參數(shù)信息,同時(shí)算法只需知道各節(jié)點(diǎn)之間RSSI大小的關(guān)系,而并不關(guān)心RSSI值具體的數(shù)值,所以所付出的硬件代價(jià)較小。下面將對(duì)算法進(jìn)行詳細(xì)的介紹。
1 相關(guān)工作
室內(nèi)定位技術(shù)很多,根據(jù)其定位采用的方案可以分為兩種:基于測(cè)距和基于非測(cè)距的定位技術(shù)。基于測(cè)距的方案需要計(jì)算得到兩個(gè)通信節(jié)點(diǎn)之間的距離信息或者角度信息,通過(guò)得到的位置信息計(jì)算未知節(jié)點(diǎn)的坐標(biāo)[12]。基于非測(cè)距的方案則利用節(jié)點(diǎn)和網(wǎng)絡(luò)的自身屬性對(duì)未知節(jié)點(diǎn)的位置進(jìn)行估算[13]。
1.1 基于測(cè)距定位方案
基于測(cè)距定位利用節(jié)點(diǎn)間的距離或角度信息來(lái)計(jì)算位置節(jié)點(diǎn)位置。典型的方案如到達(dá)時(shí)間(TOA[14])、到達(dá)時(shí)差(TDOA)[15]、到達(dá)角度(AOA)和接收信號(hào)強(qiáng)度(RSSI)[16]。TOA通常是測(cè)量范圍內(nèi)兩個(gè)通信節(jié)點(diǎn)之間信號(hào)傳播時(shí)間。一般使用超聲波此類(lèi)低速信號(hào)。TDOA與TOA非常相似,它利用不同速度的兩個(gè)信號(hào)到達(dá)時(shí)間差來(lái)計(jì)算距離。AOA是通過(guò)估計(jì)相鄰節(jié)點(diǎn)之間的相對(duì)角度。其最初被廣泛應(yīng)用于蜂窩網(wǎng)絡(luò),要求每個(gè)接收器都必須具備額外的天線才能檢測(cè)到發(fā)射器的信號(hào)。RSSI是目前最廣泛、最低廉的距離測(cè)量方案。接收機(jī)接收信號(hào)的RSSI值后通過(guò)信號(hào)傳播衰減模型計(jì)算出距離。但是,在實(shí)際環(huán)境中由于許多不可預(yù)測(cè)的因素,如噪聲、信號(hào)干擾、多徑傳播延遲等,使用RSSI進(jìn)行距離估計(jì)往往是不準(zhǔn)確的。上述基于測(cè)距定位方案需要一些額外的昂貴、復(fù)雜的硬件設(shè)施,因此這樣的定位方案不適合網(wǎng)絡(luò)資源有限的無(wú)線傳感器網(wǎng)絡(luò)。
1.2 基于非測(cè)距定位方案
基于非測(cè)距定位方案不需要任何時(shí)間、角度、信號(hào)強(qiáng)度等數(shù)據(jù)。文獻(xiàn)[17]通過(guò)鄰居節(jié)點(diǎn)的位置信息并利用質(zhì)心公式來(lái)估計(jì)未知節(jié)點(diǎn)的位置。其主要依靠鄰居節(jié)點(diǎn)的數(shù)量來(lái)提升定位精度,在鄰居節(jié)點(diǎn)數(shù)量少時(shí)精度很低。這類(lèi)利用通信重疊區(qū)域的非測(cè)距定位方案被稱(chēng)為幾何估算方法。DV-Hop的定位方案[18]是利用無(wú)線網(wǎng)絡(luò)自身的屬性來(lái)測(cè)定距離,其核心思想是用網(wǎng)絡(luò)數(shù)據(jù)每跳的距離和參考節(jié)點(diǎn)到未知節(jié)點(diǎn)跳數(shù)的乘積,表示參考節(jié)點(diǎn)到未知節(jié)點(diǎn)的距離。未知節(jié)點(diǎn)的位置計(jì)算依靠參考節(jié)點(diǎn)的位置、跳數(shù)、每一跳平均距離等參數(shù)。APIT算法[19]核心思想是未知節(jié)點(diǎn)從它所有通信的參考節(jié)點(diǎn)中選擇三個(gè)參考節(jié)點(diǎn),計(jì)算它是處于這三個(gè)參考節(jié)點(diǎn)組成的三角形內(nèi)部還是外部,然后再選擇其他三個(gè)參考節(jié)點(diǎn)進(jìn)行同樣的計(jì)算,直到計(jì)算完所有的三角形組合或者達(dá)到設(shè)定的閾值,最后未知節(jié)點(diǎn)將包含其所有的三角形的相交區(qū)域的質(zhì)心作為自己的估計(jì)位置。
2 定位算法
2.1 幾何估計(jì)算法
幾何估算方法其主要是利用參考節(jié)點(diǎn)與未知節(jié)點(diǎn)之間所處于的幾何位置關(guān)系對(duì)未知節(jié)點(diǎn)位置進(jìn)行估算。其幾何描述如圖1所示。本文排除了未知節(jié)點(diǎn)僅被一個(gè)參考節(jié)點(diǎn)所感知的情況,因?yàn)樯衔睦脜⒖脊?jié)點(diǎn)的位置擺放已經(jīng)有效地預(yù)防了該極端情形。圖1描述的是未知節(jié)點(diǎn)只被兩個(gè)參考節(jié)點(diǎn)所感知,其中A1和A2為參考節(jié)點(diǎn),圓形位置為未知節(jié)點(diǎn)M的實(shí)際位置,方形位置為未知節(jié)點(diǎn)M的估算位置。
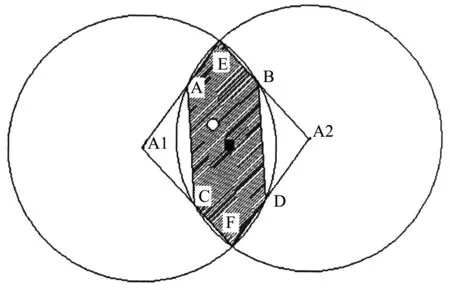
圖1 未知節(jié)點(diǎn)被兩個(gè)參考節(jié)點(diǎn)感知
其方法過(guò)程描述如下,首先參考節(jié)點(diǎn)必須具備相同的通信半徑R,且不能移動(dòng)。未知節(jié)點(diǎn)被兩參考節(jié)點(diǎn)感知,說(shuō)明其存在于兩參考節(jié)點(diǎn)通信圓重疊部分。但重疊部分為凸型結(jié)構(gòu)無(wú)法估算未知節(jié)點(diǎn)幾何位置。兩通信圓的交點(diǎn)分別為點(diǎn)E和點(diǎn)F。已知參考節(jié)點(diǎn)A1和A2的坐標(biāo)分別為(x1,y1)和(x2,y2),列方程求解得到E和F的坐標(biāo)分別為(xe,ye)和(xf,yf)。計(jì)算公式(1)如下所示:
(1)
圖形中點(diǎn)A、點(diǎn)B、點(diǎn)C和點(diǎn)D分別是直線A1E、A2E、A1F和A2F與兩圓的交點(diǎn),通過(guò)式(2)計(jì)算出點(diǎn)A的坐標(biāo),同理可以計(jì)算出點(diǎn)B、點(diǎn)C和點(diǎn)D的坐標(biāo)。
(2)
通過(guò)聯(lián)立直線和圓的方程能計(jì)算出兩個(gè)A的坐標(biāo),去除在A1通信圓之外的坐標(biāo),剩余的則為A點(diǎn)的坐標(biāo)。得到A-F點(diǎn)的坐標(biāo)后構(gòu)造出一個(gè)多邊形,這個(gè)多邊形的質(zhì)心則為幾何估計(jì)法的未知節(jié)點(diǎn)位置。未知節(jié)點(diǎn)的坐標(biāo)如式(3)所示:
(3)
下面介紹另一種情況,未知節(jié)點(diǎn)被三個(gè)參考節(jié)點(diǎn)所感知。同時(shí)特例的情況是未知節(jié)點(diǎn)被多個(gè)參考節(jié)點(diǎn)所感知后,根據(jù)實(shí)現(xiàn)設(shè)置好的閾值選取最優(yōu)的前三個(gè)參考節(jié)點(diǎn)進(jìn)行定位計(jì)算。未知節(jié)點(diǎn)被三個(gè)參考節(jié)點(diǎn)定位的效果如圖2所示。還有一種三個(gè)參考節(jié)點(diǎn)通信區(qū)域幾乎重疊的文章并未給出,因?yàn)榇朔N情況無(wú)法進(jìn)行定位,且在參考節(jié)點(diǎn)位置布置階段已經(jīng)剔除此種可能。在理論模型當(dāng)中,參考節(jié)點(diǎn)均勻分布,且重疊區(qū)域處于三個(gè)通信圓的中間位置。圖2中圓形代表未知節(jié)點(diǎn)的實(shí)際位置,方形代表未知幾點(diǎn)的估計(jì)位置。
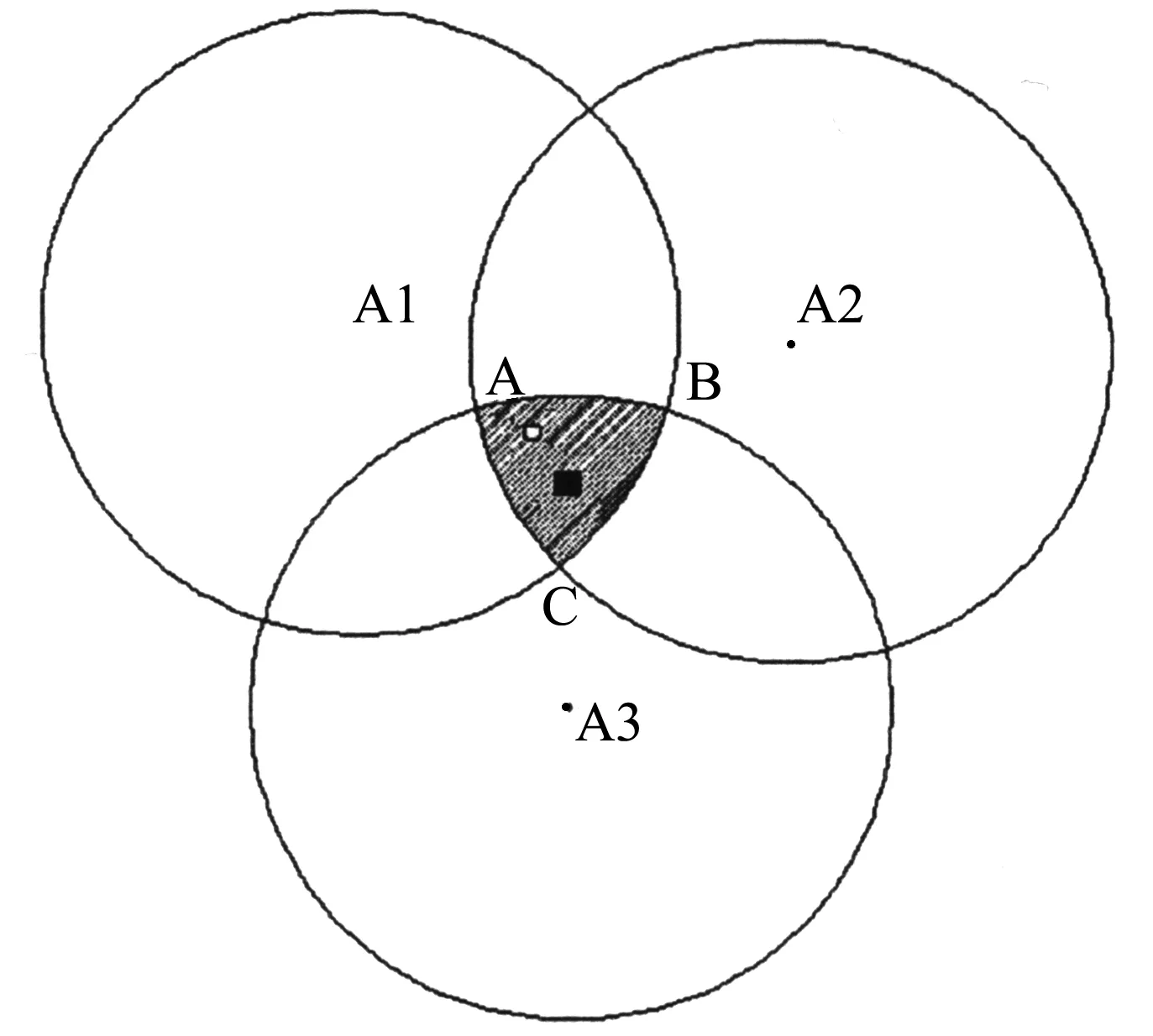
圖2 未知節(jié)點(diǎn)被三個(gè)參考節(jié)點(diǎn)感知
已知參考節(jié)點(diǎn)A1、A2、A3的坐標(biāo)分別為(x1,y1)、(x2,y2)、(x3,y3),其通信圓兩兩之間的交點(diǎn)為A、B、C,坐標(biāo)計(jì)算公式如下:
(4)
解方程可得A的坐標(biāo)為(xa,ya)和(xa′,ya′),濾除不在A1通信范圍內(nèi)的點(diǎn),最終得到A的坐標(biāo)為(xa,ya)。同理可以計(jì)算出B和C的坐標(biāo),分別為(xb,yb)和(xc,yc)。最終利用幾何估算方法,未知節(jié)點(diǎn)M的坐標(biāo)為(xm,ym):
(5)
2.2 幾何估算和RSSI值結(jié)合算法
2.2.1 前置條件
第一是網(wǎng)絡(luò)中參考節(jié)點(diǎn)的功率必須相同。在幾何估算方法中需要使用參考節(jié)點(diǎn)的通信半徑進(jìn)行換算,而通信半徑與參考節(jié)點(diǎn)的功率之間有關(guān)系。前期需要實(shí)驗(yàn)室測(cè)量節(jié)點(diǎn)的通信半徑。實(shí)驗(yàn)室測(cè)量的通信半徑和理論通信半徑誤差在30 cm內(nèi)為標(biāo)準(zhǔn)。參考節(jié)點(diǎn)的功率與參考節(jié)點(diǎn)的電源供給和天線功率正比關(guān)系。所以本文中所有參考節(jié)點(diǎn)電源全部采用220 V轉(zhuǎn)5 V供電。使用PCB天線和2.4G無(wú)線技術(shù)。
第二是網(wǎng)絡(luò)中參考節(jié)點(diǎn)的位置擺放。參考節(jié)點(diǎn)數(shù)量少于3個(gè)時(shí),未知節(jié)點(diǎn)定位誤差特別大或無(wú)法定位。參考節(jié)點(diǎn)擺放過(guò)密時(shí),網(wǎng)絡(luò)通信冗余,網(wǎng)絡(luò)質(zhì)量下降,網(wǎng)絡(luò)定位的實(shí)時(shí)性下降。在定位系統(tǒng)實(shí)施需要進(jìn)行參考節(jié)點(diǎn)位置擺放的設(shè)計(jì)與實(shí)施。保障整個(gè)網(wǎng)絡(luò)中未知節(jié)點(diǎn)都能被三個(gè)以上的參考節(jié)點(diǎn)掃描。
第三是對(duì)RSSI值的修正。基于RSSI值定位算法在網(wǎng)絡(luò)運(yùn)行過(guò)程中每個(gè)節(jié)點(diǎn)對(duì)收集的RSSI值也需要進(jìn)行修正,去除波動(dòng)和奇異值點(diǎn)。文獻(xiàn)[18,19]中利用卡爾曼濾波、最小均方差等方法對(duì)RSSI值進(jìn)行處理。文章運(yùn)用最簡(jiǎn)單的方法對(duì)RSSI值進(jìn)行處理。每個(gè)節(jié)點(diǎn)收集3個(gè)RSSI值,然后利用均值法去除波動(dòng)。
第四是對(duì)RSSI值的排序。RSSI值的排序分為兩部分,一部分是未知節(jié)點(diǎn)的排序。未知節(jié)點(diǎn)在收到三個(gè)以上參考節(jié)點(diǎn)的信息后,針對(duì)RSSI值小的前三個(gè)參考節(jié)點(diǎn)進(jìn)行組網(wǎng)通信。因?yàn)镽SSI值越小說(shuō)明參考節(jié)點(diǎn)與未知節(jié)點(diǎn)的距離越近,所以篩選出未知節(jié)點(diǎn)最近的前三個(gè)參考節(jié)點(diǎn)作為定位算法的前置條件。另一部分是上位機(jī)軟件對(duì)參考節(jié)點(diǎn)接收到未知節(jié)點(diǎn)的RSSI值進(jìn)行排序。該排序的作用是為了減少幾何估算的區(qū)域,提高算法的精度。
2.2.2 算法模型
未知節(jié)點(diǎn)被兩個(gè)參考節(jié)點(diǎn)所掃描。如圖3所示是兩個(gè)參考節(jié)點(diǎn)的模型。其中未知節(jié)點(diǎn)的實(shí)際位置為圓形點(diǎn)。方形點(diǎn)是幾何估算方法的估算點(diǎn)。
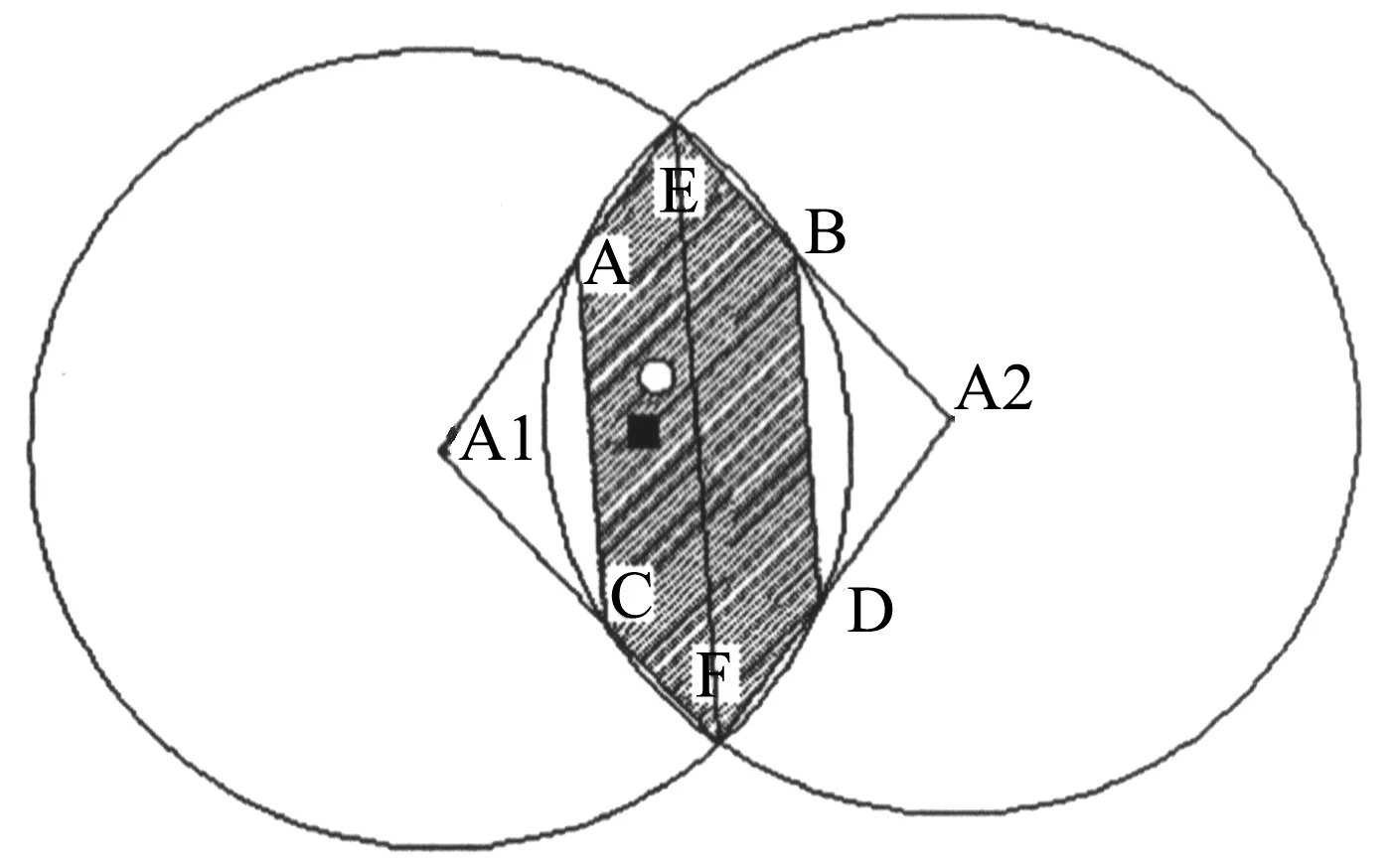
圖3 兩參考節(jié)點(diǎn)模型
根據(jù)未知節(jié)點(diǎn)與參考節(jié)點(diǎn)的實(shí)際位置可知RSSIA1>RSSIA2。實(shí)際位置中未知節(jié)點(diǎn)離參考節(jié)點(diǎn)A1更近。所以連接EF將多邊形ABCDEF分為兩個(gè)部分,而未知節(jié)點(diǎn)處于多邊形AEFC的概率大于未知節(jié)點(diǎn)處于多邊形EBDF的概率。所以幾何估算只需要在左邊圖形當(dāng)中進(jìn)行,能夠有效地減少定位誤差。圖中所示方形為優(yōu)化后的估計(jì)位置,很明顯誤差減少了一半。改進(jìn)后的未知節(jié)點(diǎn)M的坐標(biāo)如式(6)所示:
(6)
如圖4所示是三個(gè)參考節(jié)點(diǎn)的模型。其中圓形是未知節(jié)點(diǎn)的實(shí)際位置,方形是未知節(jié)點(diǎn)的估計(jì)位置。上位機(jī)收集了參考節(jié)點(diǎn)與未知節(jié)點(diǎn)的RSSI值,并對(duì)三個(gè)RSSI值進(jìn)行排序。排序結(jié)果為RSSIA1>RSSIA3>RSSIA2。排序結(jié)果可知未知節(jié)點(diǎn)離參考節(jié)點(diǎn)A1最近,其次是參考節(jié)點(diǎn)A3,最后是參考節(jié)點(diǎn)A2。
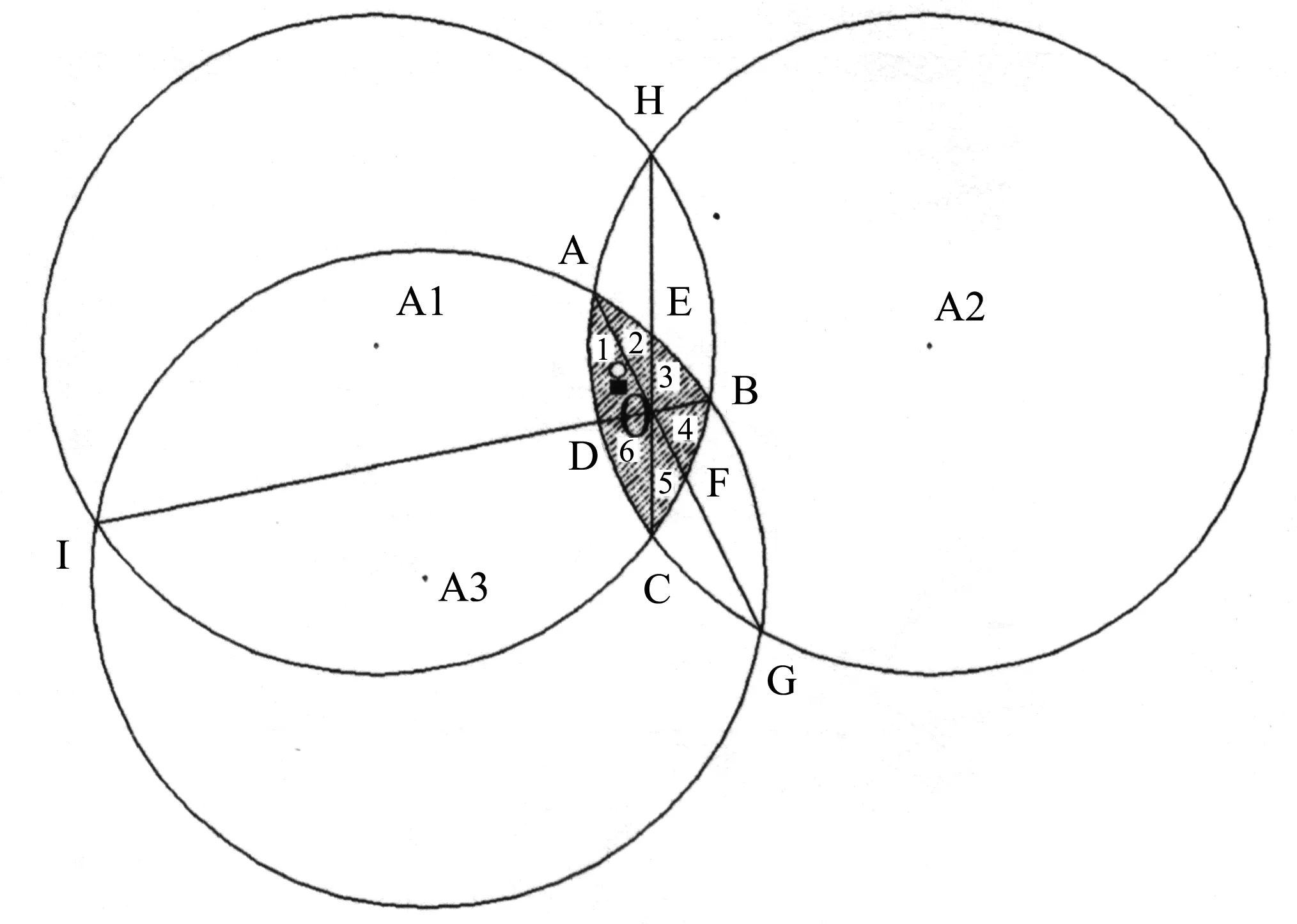
圖4 三參考節(jié)點(diǎn)模型
C、H是圓A1和圓A2的交點(diǎn),A、G是圓A2和圓A3的交點(diǎn),B、I是圓A3和圓A1的交點(diǎn)。連接CH、AG、BI將三圓重疊部分分割成6個(gè)區(qū)域。我們將其中的1、2區(qū)域劃分到圓A1的范圍內(nèi),3、4區(qū)域劃分到圓A2的范圍內(nèi),5、6區(qū)域劃分到圓A3的范圍內(nèi)。根據(jù)上文當(dāng)中的排序,未知節(jié)點(diǎn)最靠近參考節(jié)點(diǎn)A1,所以先把未知節(jié)點(diǎn)的區(qū)域劃分到靠近參考節(jié)點(diǎn)A1的1、2區(qū)域。然后進(jìn)行下一步判斷,未知節(jié)點(diǎn)比較靠近參考節(jié)點(diǎn)A3,所以將未知節(jié)點(diǎn)的區(qū)域劃分到靠近參考節(jié)點(diǎn)A3的1區(qū)域。所以未知節(jié)點(diǎn)最后的估算區(qū)域?yàn)?區(qū)域。1區(qū)域的質(zhì)心坐標(biāo)即為未知節(jié)點(diǎn)的估計(jì)坐標(biāo)。
各點(diǎn)坐標(biāo)計(jì)算過(guò)程如下:
A、G點(diǎn)的坐標(biāo)計(jì)算如式(7)所示:
(7)
B、I點(diǎn)的坐標(biāo)計(jì)算如式(8)所示:
(8)
O點(diǎn)的坐標(biāo)計(jì)算如式(9)所示:
(9)
D點(diǎn)的坐標(biāo)計(jì)算如式(10)所示:
(10)
最后通過(guò)質(zhì)心算法求出未知節(jié)點(diǎn)的坐標(biāo)。上述方法是將幾何估算方法的估算區(qū)域縮小至之前的六分之一。在此基礎(chǔ)上繼續(xù)加入構(gòu)造三角形優(yōu)化進(jìn)一步提高算法的精度。連接A1A2、A2A3、A3A1后形成構(gòu)造三角形,將陰影部分縮小如圖5所示,形成了新的陰影區(qū)域1、2、3、4、5、6。經(jīng)過(guò)構(gòu)造三角形優(yōu)化過(guò)后的算法比優(yōu)化之前的精度進(jìn)一步提高。縮小了估算范圍,最終利用質(zhì)心法得出了未知節(jié)點(diǎn)的坐標(biāo)。最終估算坐標(biāo)與實(shí)際坐標(biāo)非常接近,誤差很小。
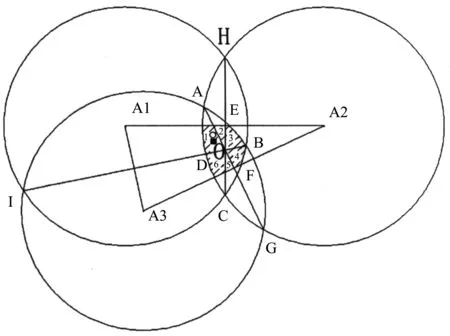
圖5 構(gòu)造三角形優(yōu)化
3 仿真實(shí)驗(yàn)與實(shí)際檢測(cè)
3.1 仿真實(shí)驗(yàn)與分析
利用Matlab仿真軟件將本文算法與基于RSSI值方法、幾何估算方法進(jìn)行對(duì)比。分別就定位算法的精度和穩(wěn)定性做了詳細(xì)的仿真測(cè)試,下面分別介紹仿真測(cè)試的結(jié)果。
設(shè)置參考節(jié)點(diǎn)的通信半徑為10 m,參考節(jié)點(diǎn)數(shù)量50個(gè),未知節(jié)點(diǎn)數(shù)量50個(gè)隨機(jī)分布在網(wǎng)絡(luò)當(dāng)中。定位范圍為50 m×50 m的正方形區(qū)域。圖中“+”表示未知節(jié)點(diǎn)的實(shí)際位置,“*”表示未知節(jié)點(diǎn)的估計(jì)位置。圖6是RSSI方法的仿真結(jié)果。圖7是幾何方法的仿真結(jié)果。圖8是本文方法的仿真結(jié)果。RSSI方法定位精度的波動(dòng)很大,在某些區(qū)域內(nèi)參考節(jié)點(diǎn)分布密集,定位效果好,某些區(qū)域內(nèi)參考節(jié)點(diǎn)分布稀疏,定位效果差。幾何方法定位的精度普遍偏低,在整個(gè)覆蓋范圍內(nèi)定位誤差較大,但受參考節(jié)點(diǎn)分布影響較小,比較穩(wěn)定。本文算法效果較好,定位精度和穩(wěn)定性較之RSSI方法和幾何方法都有提升。保留了RSSI方法的定位精度,幾何方法的穩(wěn)定性。
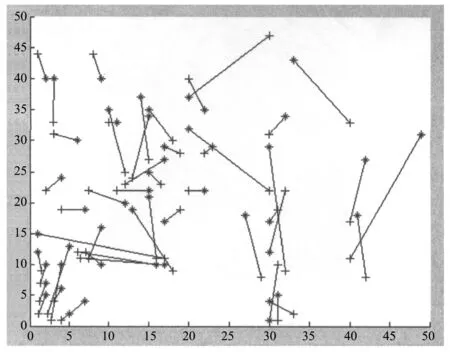
圖6 RSSI方法仿真結(jié)果
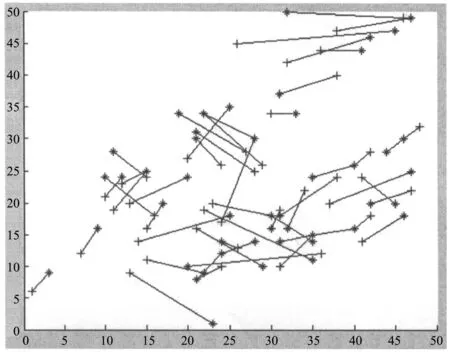
圖7 幾何方法仿真結(jié)果
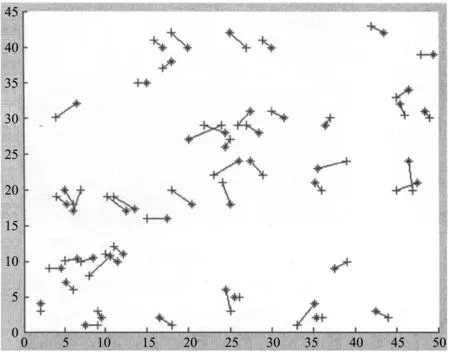
圖8 本文方法仿真結(jié)果
選取10~100個(gè)參考節(jié)點(diǎn),10~100個(gè)未知節(jié)點(diǎn),通信半徑為5 m,在50 m×50 m的方形范圍內(nèi)進(jìn)行定位測(cè)試。設(shè)置實(shí)際位置與估計(jì)未知距離在2 m內(nèi)的為定位成功。圖9中是仿真結(jié)果,橫坐標(biāo)為節(jié)點(diǎn)數(shù)量,縱坐標(biāo)為定位成功率。RSSI方法隨著節(jié)點(diǎn)數(shù)量的增加定位效果產(chǎn)生波動(dòng),但整體維持在80%水平。幾何方法定位精度隨著節(jié)點(diǎn)的增加而提高。節(jié)點(diǎn)數(shù)量為10個(gè)是定位精度只有30%。隨著節(jié)點(diǎn)的數(shù)量增加,幾何方法中覆蓋區(qū)域越來(lái)越小所以定位精度越來(lái)越高。本文方法不受節(jié)點(diǎn)數(shù)量的影響,維持在90%的水平。

圖9 參考節(jié)點(diǎn)數(shù)量變化
選取20個(gè)參考節(jié)點(diǎn)與20個(gè)未知節(jié)點(diǎn),節(jié)點(diǎn)通信半徑在1~10 m內(nèi)變化,在10 m×10 m的方形范圍內(nèi)進(jìn)行定位測(cè)試。設(shè)置實(shí)際位置與估計(jì)未知距離在2 m內(nèi)的為定位成功。橫坐標(biāo)為節(jié)點(diǎn)通信半徑,縱坐標(biāo)為定位成功率。如圖10所示隨著節(jié)點(diǎn)的通信半徑逐漸增大,RSSI方法和幾何方法的定位精度逐漸減小。節(jié)點(diǎn)通信半徑越大,未知節(jié)點(diǎn)能夠監(jiān)測(cè)到的參考節(jié)點(diǎn)越多,參考節(jié)點(diǎn)越多,在密集的區(qū)域內(nèi)會(huì)影響定位精度。本文方法限制了未知節(jié)點(diǎn)監(jiān)測(cè)的參考節(jié)點(diǎn)數(shù)量,參考節(jié)點(diǎn)的上線數(shù)量為3個(gè),所以并不受此干擾因素的影響。
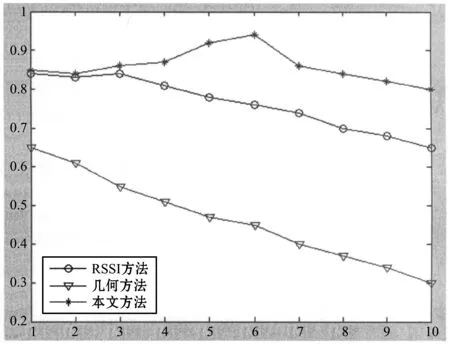
圖10 參考節(jié)點(diǎn)通信半徑變化
3.2 醫(yī)院場(chǎng)景運(yùn)行檢測(cè)
如圖11所示中紅圈內(nèi)為實(shí)際定位產(chǎn)品。其功能是保障醫(yī)療器械、醫(yī)院資產(chǎn)的安全,監(jiān)控醫(yī)療設(shè)備的使用情況等。
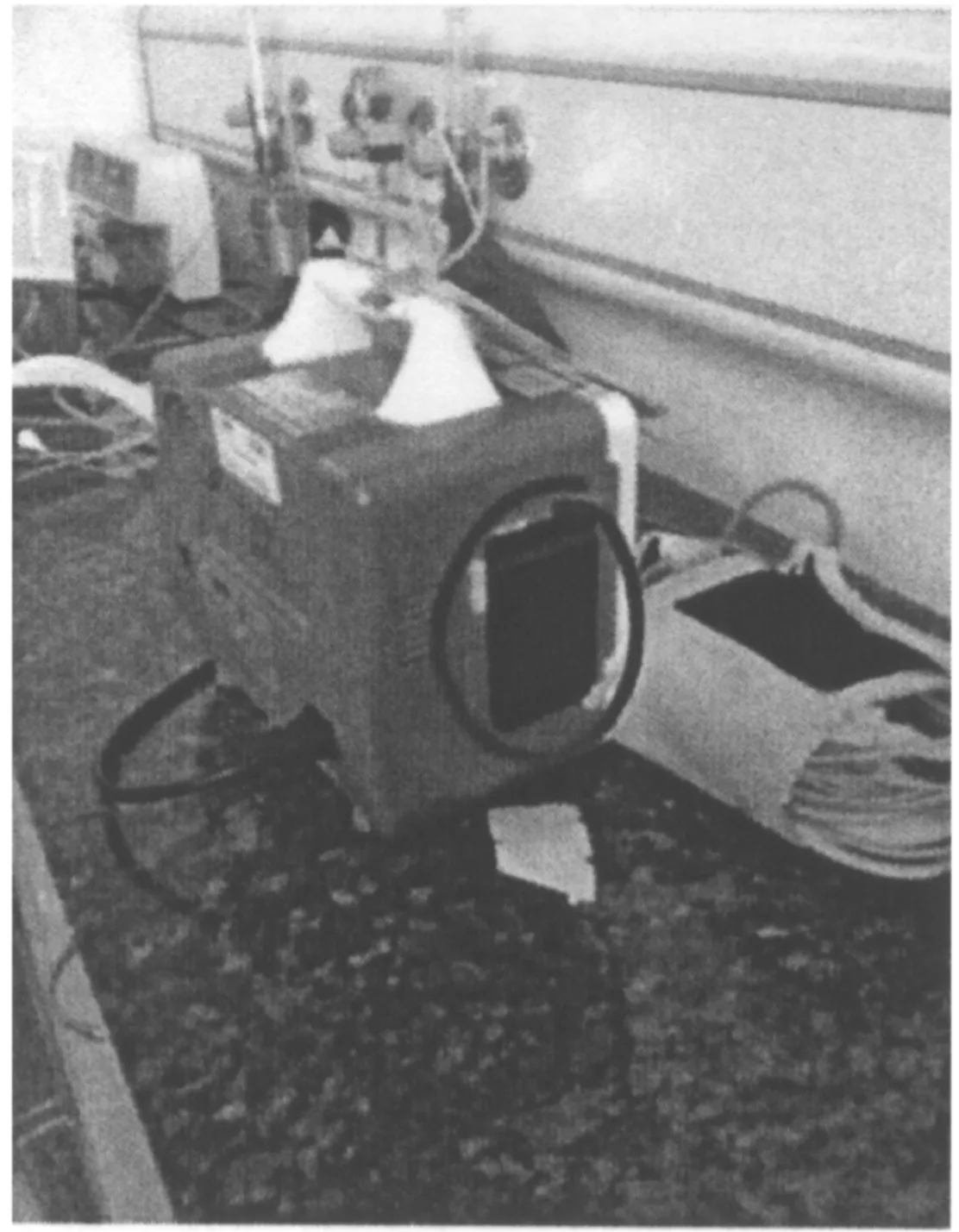
圖11 實(shí)際產(chǎn)品圖
幾何方法在實(shí)際運(yùn)用當(dāng)中定位精度遠(yuǎn)遠(yuǎn)不能滿(mǎn)足商業(yè)需求,所以這里并沒(méi)用將幾何方法加入實(shí)際檢測(cè)當(dāng)中。圖12中RSSI方法的實(shí)際運(yùn)用,采用的是三邊定位方法。其中方形點(diǎn)表示的是醫(yī)療器械的估計(jì)位置。我們?cè)谔幹檬掖娣帕?1臺(tái)醫(yī)療設(shè)備,每個(gè)設(shè)備都貼有定位產(chǎn)品。通過(guò)圖很明顯能夠看出11臺(tái)設(shè)備處于5個(gè)不同的位置,但是實(shí)際情況是11臺(tái)設(shè)備都處于同一地點(diǎn)。產(chǎn)生此類(lèi)現(xiàn)象的原因是醫(yī)院環(huán)境內(nèi)參考節(jié)點(diǎn)都布置在樓層的集成吊頂內(nèi),未知節(jié)點(diǎn)處于房間內(nèi)。未知節(jié)點(diǎn)與參考節(jié)點(diǎn)不處于同一個(gè)平面;未知節(jié)點(diǎn)與參考節(jié)點(diǎn)中間間隔兩堵墻;未知節(jié)點(diǎn)與參考節(jié)點(diǎn)之間存在大量人員流動(dòng)。所以上位機(jī)收集的RSSI值一直處于變動(dòng)狀態(tài),導(dǎo)致了多個(gè)節(jié)點(diǎn)的定位錯(cuò)誤。
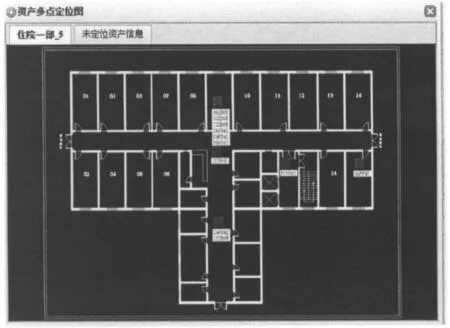
圖12 基于RSSI值定位效果
圖13是改進(jìn)后的基于RSSI值定位算法。對(duì)RSSI值進(jìn)行了濾波、去抖,去除了奇異值點(diǎn)和擾動(dòng)。圖中6個(gè)未知節(jié)點(diǎn)都處于同一位置,但圖中仍然顯示了6個(gè)未知節(jié)點(diǎn)處于4個(gè)不同的地方。但圖中很明顯看到誤差范圍減小,未知節(jié)點(diǎn)的誤差區(qū)域縮小了。去除了環(huán)境因素的影響可以提高定位精度。但此種定位精度仍然不能滿(mǎn)足實(shí)際運(yùn)用的需求。
圖14中是采用了本文算法后的定位效果截圖。兩個(gè)未知節(jié)點(diǎn)擺放在護(hù)士站附近位置,實(shí)際位置與估計(jì)位置誤差1 m左右,定位精度可以滿(mǎn)足實(shí)際運(yùn)用需求。
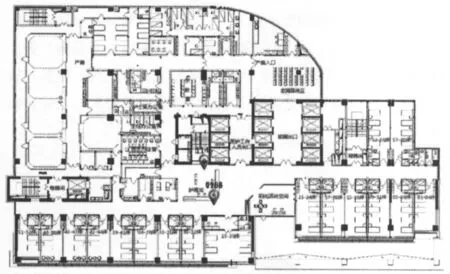
圖14 基于本文方法定位效果
4 結(jié) 語(yǔ)
本文提出了一種幾何估算與RSSI值相結(jié)合的定位算法。有效彌補(bǔ)了幾何估算方法的不足。并進(jìn)行了仿真測(cè)試和實(shí)際測(cè)試。與RSSI方法和幾何方法進(jìn)行了詳細(xì)的對(duì)比和分析。結(jié)果表明本文方法要優(yōu)于其他兩種定位方法。定位精度和穩(wěn)定性都有顯著的提升。在實(shí)際運(yùn)用當(dāng)中也取得了良好的定位效果。
[1] Want R,Hopper A,Falcao V,et al. The active badge location system[J]. ACM Transactions on Information Systems, 1992, 10(1):91-102.
[2] 楊云濤, 石志勇, 關(guān)貞珍,等. 地磁場(chǎng)在導(dǎo)航定位系統(tǒng)中的應(yīng)用[J]. 中國(guó)慣性技術(shù)學(xué)報(bào), 2007, 15(6):686-692.
[3] 劉琪, 閆麗, 周正. UWB的技術(shù)特點(diǎn)及其發(fā)展方向[J]. 現(xiàn)代電信科技, 2009, 39(10):6-10.
[4] 易前旭. 移動(dòng)蜂窩網(wǎng)絡(luò)的無(wú)縫切換技術(shù)[J]. 無(wú)線互聯(lián)科技, 2014(7):32-32.
[5] 張利. 基于WiFi技術(shù)的定位系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)[D]. 北京:北京郵電大學(xué),2009.
[6] 林琪. “LiFi”,讓燈泡變成無(wú)線路由[J]. 環(huán)境, 2013(11):77-79.
[7] 王茜, 王巖.無(wú)線城域網(wǎng)WiMAX技術(shù)及其應(yīng)用[J].電信科學(xué), 2004, 20(8):27-30.
[8] 周怡颋, 凌志浩, 吳勤勤.ZigBee無(wú)線通信技術(shù)及其應(yīng)用探討[J].自動(dòng)化儀表, 2005, 26(6):5-9.
[9] 馬建倉(cāng), 羅亞軍, 趙玉亭.藍(lán)牙核心技術(shù)及應(yīng)用[M].北京: 科學(xué)出版社, 2003.
[10] 蔣挺, 趙成林. 紫蜂技術(shù)及其應(yīng)用[M].北京:北京郵電大學(xué)出版社, 2006.
[11] 任克強(qiáng), 莊放望. 移動(dòng)錨節(jié)點(diǎn)凸規(guī)劃定位算法研究及改進(jìn)[J]. 傳感技術(shù)學(xué)報(bào), 2014(10):1406-1411.
[12] 周怡颋, 凌志浩, 吳勤勤. ZigBee無(wú)線通信技術(shù)及其應(yīng)用探討[J].自動(dòng)化儀表, 2005, 26(6):5-9.
[13] 彭宇, 王丹.無(wú)線傳感器網(wǎng)絡(luò)定位技術(shù)綜述[J].電子測(cè)量與儀器學(xué)報(bào), 2011, 25(5):389-399.
[14] Blanco L, Serra J, Najar M. SPC12-2: Low Complexity Toa Estimation for Wireless Location[C]// Global Telecommunications Conference, 2006. GLOBECOM’06, San Francisco, Ca, Usa, 27 November-1 December. DBLP, 2006:1-5.
[15] 史小紅.基于TDOA的無(wú)線定位方法及其性能分析[J].東南大學(xué)學(xué)報(bào), 2013, 43(2):252-257.
[16] 方震, 趙湛, 郭鵬, 等.基于RSSI測(cè)距分析[J].傳感器學(xué)報(bào), 2007, 20(11):2526-2530.
[17] 陳維克,李文鋒,首珩, 等.基于RSSI的無(wú)線傳感器網(wǎng)絡(luò)加權(quán)質(zhì)心定位算法[J]. 武漢理工大學(xué)學(xué)報(bào)(交通科學(xué)與工程版), 2006, 32(2): 265-268.
[18] Li J, Zhang J, Xiande L. A Weighted DV-Hop Localization Scheme for Wireless Sensor Networks[C]// International Conference on Scalable Computing and Communications; Eighth International Conference on Embedded Computing. IEEE Computer Society, 2009:269-272.
[19] Zhou Y, Ao X, Xia S. An improved APIT node self-localization algorithm in WSN[C]// Intelligent Control and Automation, 2008. Wcica 2008. World Congress on. IEEE, 2008:7582-7586.
INDOOR LOCATION ALGORITHM BASED ON GEOMETRICAL ESTIMATION AND RSSI
Xu Chi1Qiu Tian2Cao Guangcheng1
1(ShanghaiInstituteofTechnology,Shanghai201418,China)2(ShanghaiKyeeCo.,LTD,Shanghai200240,China)
This paper presents a new method based on geometric estimation and RSSI. The location of the unknown node can be estimated by the communication range of the reference node. An unknown node location can be estimated by reference to the communication overlap area of the node. The RSSI value optimization is introduced based on the geometric estimation method. The RSSI value is used to divide the geometric estimation region, and the new unknown node position is calculated by using the improved formula. The experimental results show that the proposed scheme is superior to the basic localization algorithm and has a high accuracy. At the same time, a preliminary system test is conducted in the hospital scene which gets a good positioning effect.
Geometrical estimation RSSI Indoor localization
2016-05-15。徐馳,碩士,主研領(lǐng)域:室內(nèi)定位。邱添,學(xué)士。曹廣成,碩士。
TP3
A
10.3969/j.issn.1000-386x.2017.06.053
猜你喜歡
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
兒童故事畫(huà)報(bào)(2019年5期)2019-05-26 14:26:14
中國(guó)科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
電測(cè)與儀表(2015年5期)2015-04-09 11:30:52
