懸掛系統參數對車體平順性影響研究
2017-07-19 10:07:53崔彧青
科技與創新 2017年13期
關鍵詞:系統
崔彧青,張 晨
(裝甲兵工程學院,北京 100072)
懸掛系統參數對車體平順性影響研究
崔彧青,張 晨
(裝甲兵工程學院,北京 100072)
以某型號步兵戰車為研究對象,戰車在D級路面以7 m/s的速度行駛,改變懸掛系統參數,得到不同參數下車體垂直加速度變化情況和功率譜密度分布情況,并對其進行分析,得到了不同參數對車體平順性的不同影響。仿真研究為改善車體行駛過程中的平順性和后續基于底盤的研究打下了堅實的基礎,也能為日后的相關工作提供借鑒和參考。
懸掛系統;車體垂直加速度;功率譜密度;剛度系數
懸掛系統作為車輛重要的組成部分,它對車輛行駛過程中的平順性起著決定性作用。為了更好地了解車輛懸掛系統對車體平順性的影響,現對車體懸掛系統進行建模仿真,研究不同懸掛參數對車體振動造成的影響。
1 路面激勵輸入建模
為了對車體的懸掛系統進行動力學仿真,首先對懸掛系統的激勵輸入——路面不平度建模仿真。在道路工程相關領域,對路面不平的程度描述主要通過路面不平度這一參數進行量化。路面不平度的功率譜密度Gq(n)的擬合表達式為:

式(1)中:n為空間頻率,其物理含義為信號波長的倒數m-1;n0為參考空間頻率,其值一般取n0=0.1m-1;ω為頻率指數,ω=2;Gq(n0)為參考空間頻率下的路面譜密度值,又被稱為路面不平度系數。
車體振動還與車體的運動速度有關,當車體以速度ν駛過空間頻率n的路面不平度時,輸入的時間頻率與空間頻率的關系為:

由此,在一定車速下,時間頻率功率譜密度為:

在D級路面下,以7 m/s的速度行駛,車輛的路面激勵輸入時域如圖1所示。
2 車體動力學建模
本文以某型戰車底盤為研究對象,將其底盤近似簡化為圖2所示的樣子。
圖2中,ki為第i個懸掛系統的彈性系數;ci為第i個懸掛系統的阻尼系數;kti為第i個輪胎的彈性系數;qi為第i個輪胎所處路面的路面不平度;zi為第i個車輪相對于靜平衡位置的垂直位移大小;mi為第i個輪胎的輪胎質量;li為第i個輪胎軸心距懸掛質量質心所在垂面的距離;為車體垂直運動位移、速度、加速度大小;mc為車體質量。
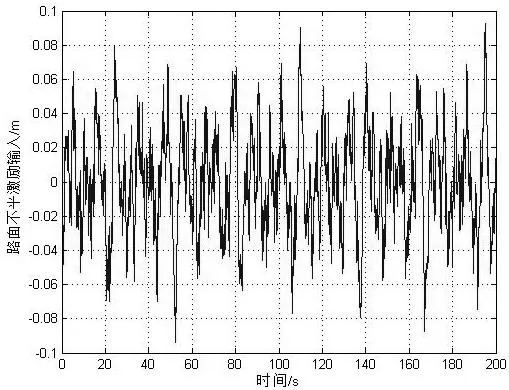
圖1 D級路面下7 m/s速度行駛的路面激勵輸入圖
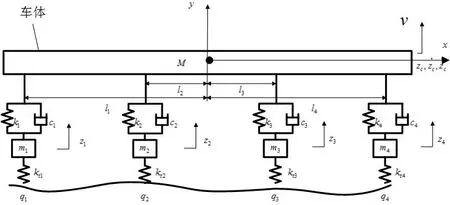
圖2 車體底盤簡化模型
圖2中,坐標系選取規則如下:①車輛以速度ν行駛,選取車輛靜止平衡時耳軸中心為車身的坐標原點,速度的方向為x軸正方向,垂直向上方向為y軸正方向;②車輛兩側各車輪相對于靜平衡位置的垂直位移為zi(i=1,2,3,4),其軸心相對于車身坐標系原點的距離為li,且位于x軸正方向為正,反之為負;③忽略車輪經過路面時對路面不平度的影響。
車體平順性主要是通過車體垂直運動加速度表現的,所以,為了得到車體垂直運動加速度的變化情況,結合前人的工作基礎,建立車體動力學模型,即:
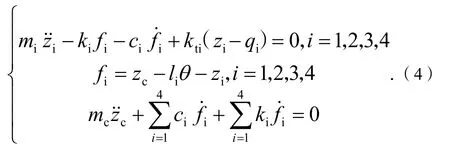
求解式(4)即可得到車體運動加速度z˙c的變化情況。
3 仿真過程
3.1 仿真參數
在建模過程中,步兵戰車的具體參數如表1所示。
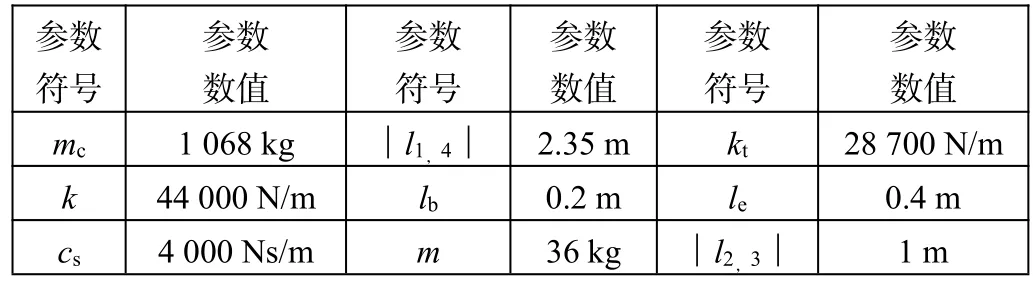
表1 車輛懸掛系統部分參數
3.2 仿真結果
根據車體動力學模型和前期對路面激勵輸入的仿真,得到車體垂直加速度的變化情況,具體如圖3所示。
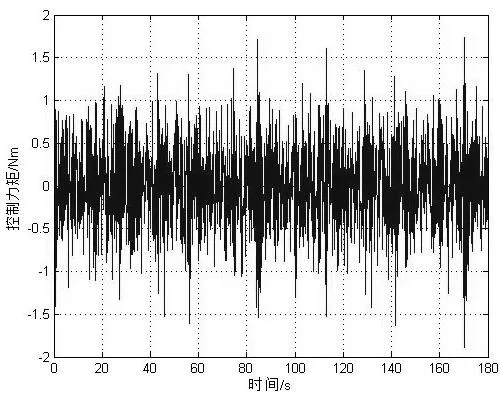
圖3 D級路面下7 m/s速度車體垂直運動加速度
改變車體懸掛系統和輪胎的參數,車體垂直加速度變化的功率譜密度情況如圖4、圖5、圖6所示。
由圖4可知,改變懸掛系統剛度系數會給車體垂直加速度帶來明顯的影響。隨著剛度系數的增加,車體振動增強,加速度不斷增大,功率譜密度峰值增加幅度大,所以,減小懸掛系統的剛度可以改善車體的平順性。
由圖5可知,改變懸掛系統阻尼系數可以在一定程度上減小車體振動情況,其加速度的功率譜密度峰值隨著阻尼系數的增大而減小。但是,在高頻區,其加速度功率譜密度隨著阻尼系數的增大而小幅增大。

圖4 改變懸掛剛度的情況
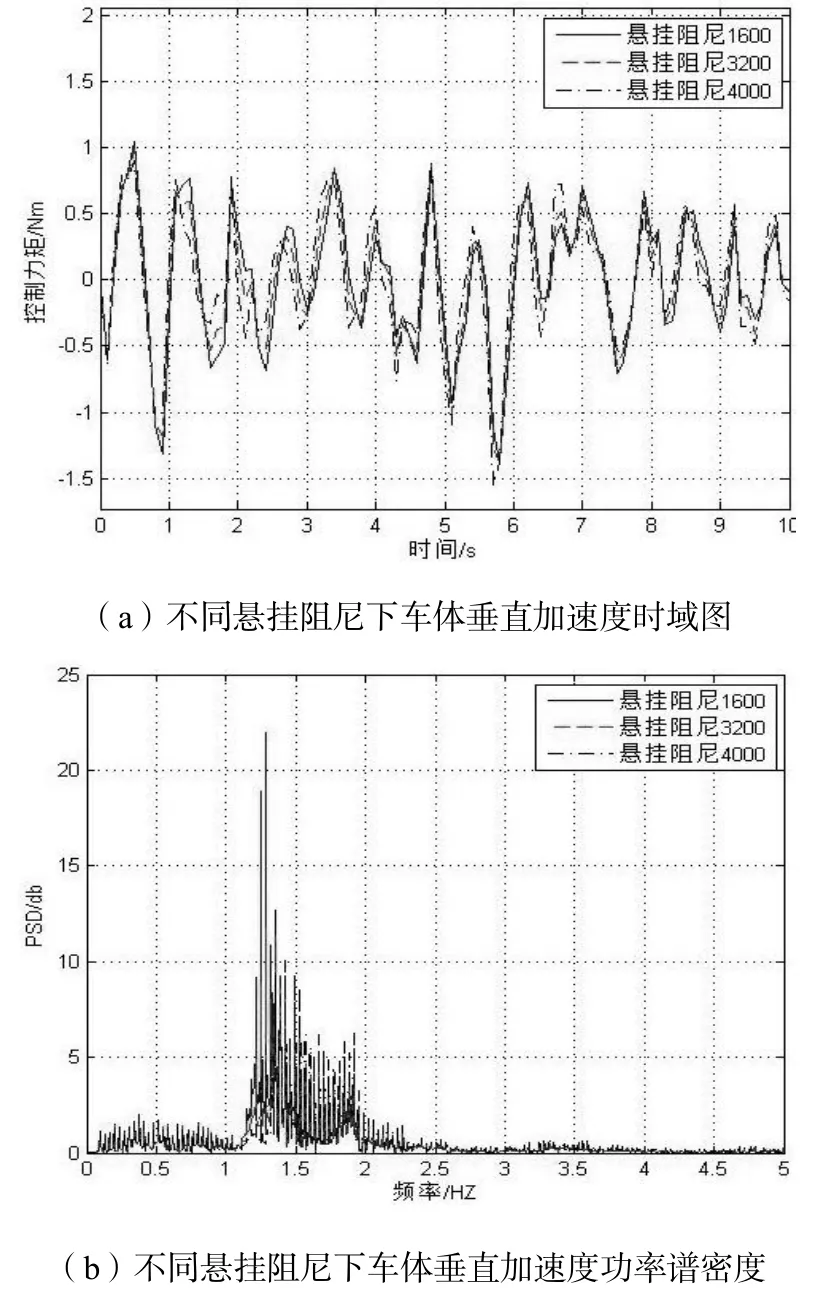
圖5 改變懸掛阻尼的情況
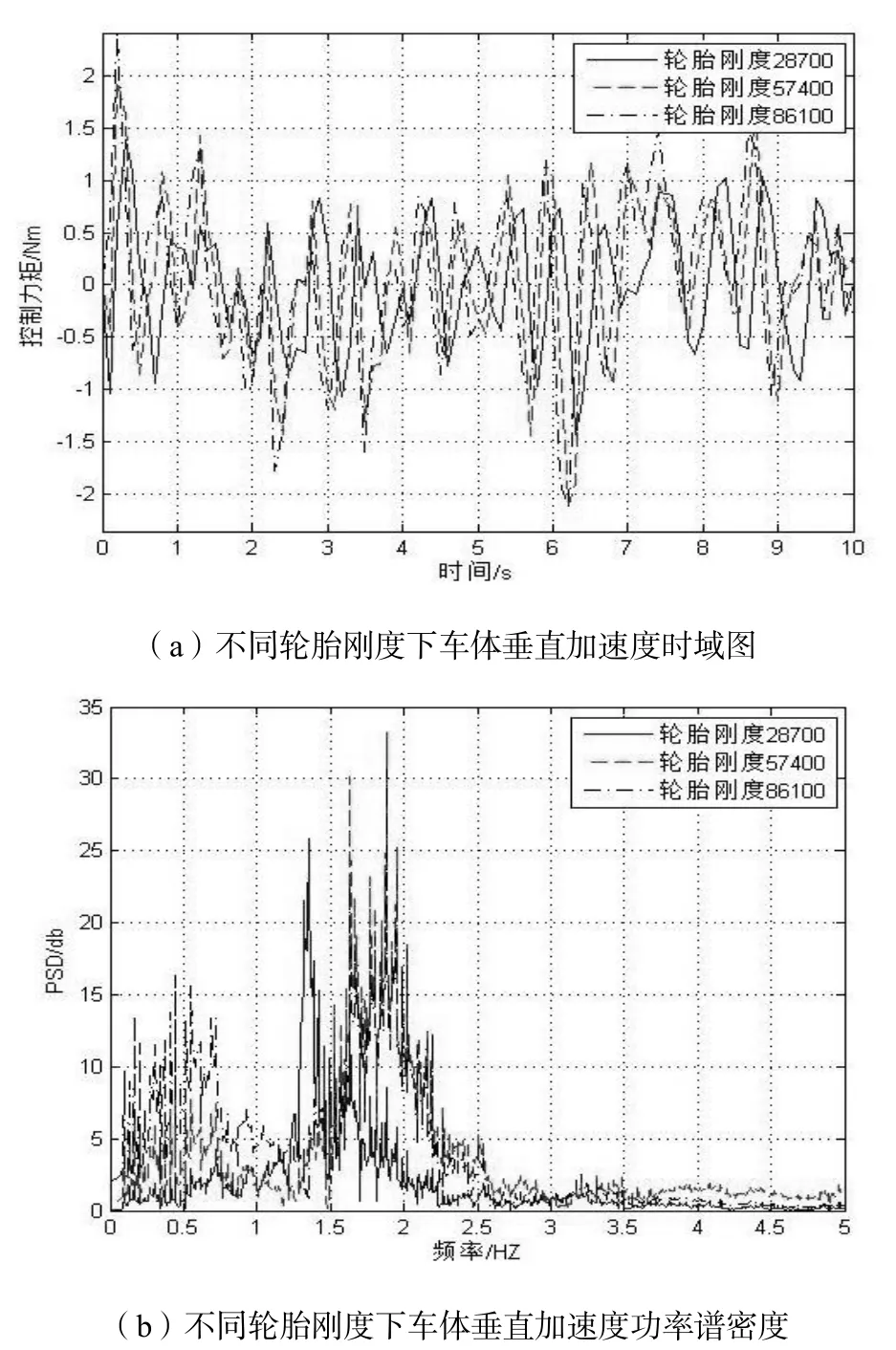
圖6 改變輪胎剛度的情況
由圖6可知,改變輪胎的剛度系數對車體振動情況的影響比較小,其加速度的功率譜密度峰值并未發生較大的變化。但是,在低頻段,隨著輪胎剛度系數的增加,其加速度功率譜密度會隨之升高。
4 結束語
通過改變懸掛系統和輪胎參數,工作人員可以初步了解各參數對車體垂直加速度的影響,從而為改善車體平順性提供理論支撐,為基于車體底盤開展更深入的研究打好基礎。
[1]段虎明,石峰,謝飛,等.路面不平度研究綜述[J].振動與沖擊,2009,28(9):95-101.
[2]梁新成,張軍,徐瑞.三角級數法的路面重構仿真研究[J].汽車工程學報,2011(6):442-447.
[3]余志生.汽車理論[J].北京:機械工業出版社,1990.
[4]閔建平,譚俊杰,李劍峰.行進間射擊時的動力學研究[J].振動與沖擊,2003(4):88-90.
[5]謝潤,楊國來.自行高炮行進間射擊炮口響應特性研究[J].兵工學報,2014(8):1158-1163.
〔編輯:白潔〕
U463.33
A
10.15913/j.cnki.kjycx.2017.13.006
2095-6835(2017)13-0006-03
崔彧青(1993—),男,山東煙臺人,碩士研究生,主要研究方向為模式識別與智能控制。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32