框架式導引頭自抗擾控制應用研究
2017-07-21 05:13:45劉新宇宋金來張宇翔
航天控制 2017年3期
劉新宇 宋金來 金 岳 王 睿 張宇翔
北京航天微系統(tǒng)研究所,北京100094
框架式導引頭自抗擾控制應用研究
劉新宇 宋金來 金 岳 王 睿 張宇翔
北京航天微系統(tǒng)研究所,北京100094

對框架式導引頭視線穩(wěn)定回路控制問題,提出了自抗擾控制器設計方法。視線穩(wěn)定回路雙通道所受干擾具有不確定性,通過線性擴張狀態(tài)觀測器對系統(tǒng)的總和擾動實時估計并予以動態(tài)補償,使被控對象化為“積分器串聯(lián)型”,再利用跟蹤微分器和PD控制設計ADRC控制律。試驗結果表明,在低成本約束條件下,ADRC能將隔離度從7.5%降低到3%,較PID控制有更好的控制品質。 關鍵詞 PID;自抗擾控制; 線性擴張狀態(tài)觀測器;跟蹤微分器;隔離度
導引頭是精確制導武器的核心部件之一,其性能指標很大程度上決定著制導武器的制導精度。其中框架式導引頭是一類采用伺服機構實現(xiàn)視軸穩(wěn)定和目標跟蹤的裝置,其重要性能指標,即隔離度表征導引頭伺服穩(wěn)定平臺對彈體擾動的去耦能力(隔離度越小,表示穩(wěn)定平臺隔離彈體擾動的能力越強)[1],工程設計中導引頭隔離度越小越好。然而,彈藥小型化、低成本及適合大批量生產的要求使得導引頭結構件設計和加工裝配精度不高,角速率傳感器(陀螺)的選取成本受限,傳感器噪聲大,系統(tǒng)存在較多未知干擾,且在低成本約束條件下,被控對象非線性特征明顯,不易精確建模,應用經典PID控制往往無法實現(xiàn)滿意的隔離度指標。本文提出了將自抗擾控制(Active Disturbance Rejection Control, ADRC)應用于框架式導引頭穩(wěn)定回路的方法,以降低導引頭隔離度。
ADRC最大特點是不取決于被控對象的數(shù)學模型,能對系統(tǒng)模型的不確定性與未知擾動進行實時估計并動態(tài)補償,控制參數(shù)整定簡便且抗干擾能力強。最近幾年,ADRC理論研究取得了很大進展[2-5],在無人機和精確制導武器的姿態(tài)控制應用方面也獲得了一些成果[6-9]。鑒于框架式導引頭俯仰和偏航2個通道特性相似,本文只基于偏航通道穩(wěn)定回路的控制設計,提出用線性擴張狀態(tài)觀測器(Linear Extended States Observers, LESO)對總和擾動進行實時估計與補償,再通過跟蹤微分器(Tracking Differentiator, TD)和PD控制實現(xiàn)閉環(huán)控制。
1 伺服機構數(shù)學模型
框架式導引頭偏航通道穩(wěn)定回路控制的基本原理為:利用安裝在內框架的角速率陀螺敏感到視線軸的偏航角速率ωy,通過反饋控制形成偏航框伺服電機控制指令,驅動電機運動,實現(xiàn)對偏航框的穩(wěn)定控制。
導引頭偏航框運動的主要方程[10]為:
m(-ρcxaoz+ρczaox)
(1)
(2)

My=Mmotor_y-Mf_y-Mwire_y
(3)
式中,Mmotor_y為偏航軸電機驅動力矩,Mf_y為偏航軸非線性摩擦力矩,Mwire_y為偏航軸非線性導線干擾力矩,并有:
(4)
式中,KT為伺服電機的轉矩系數(shù);λy為導引頭視線軸相對于彈體坐標系的方位角。
將式(4)中第1式代入式(3),再將式(3)代入式(1),整理得:
(5)
式(5)中,
表示偏航框的慣量耦合力矩;Mb_y=m(-ρcxaoz+ρczaox)表示偏航框的質量不平衡力矩。
由式(2)可得:
(6)
將式(6)代入式(5),整理有:
(7)
式(7)中,
Mwire_y+MJ_y+Mb_y)

(8)

導引頭偏航框架穩(wěn)定回路的設計,即以式(8)為系統(tǒng)模型,通過設計控制量u,使偏航角速率ωy按要求跟蹤指令角速率。
系統(tǒng)控制的特性如下:
1)ωy是被控量,可由MEMS陀螺量測得到,但是MEMS陀螺精確性較低及存在較大噪聲,二者存在一定誤差;
2)將fω看作系統(tǒng)模型的未知總和擾動;
3)u對ωy完全能控。
2 ADRC設計
傳統(tǒng)PID控制直接將輸入信號與輸出信號的差作為控制信號,存在響應快速性與超調性之間的矛盾。本文設計的自抗擾控制器包含2個部分:TD和LESO。TD通過安排過渡過程,給出合理的控制信號和高質量的微分信號,解決了響應快速性與超調性之間的矛盾;LESO用來解決系統(tǒng)模型未知總和擾動對控制對象的影響。
2.1TD設計
TD的動態(tài)特性[11]為:輸入信號為u(t),輸出信號為x1(t)和x2(t)。其中,x1(t)能最快速跟蹤輸入信號u(t);x2(t)是x1(t)的微分,其實際上是u(t)的“廣義微分”。
實際應用中,離散TD具體形式[11]為:
(9)
式中,T為積分步長(采樣周期),將T適當縮小可以有效抑制噪聲放大;u為輸入信號;h為濾波因子,調節(jié)h時通常要求適當大于T,h取值太小會降低濾波效果,過大又會造成跟蹤相位延遲增大,影響跟蹤性能;r為速度因子,r取值太大會引起輸出振蕩,太小則會導致響應時間變長。
式(9)中非線性函數(shù)fhan(x1,x2,r,h)被稱作快速最優(yōu)控制綜合函數(shù),為提高TD的跟蹤速度,并避免微分信號發(fā)生高頻顫振,文獻[11]直接按照離散系統(tǒng)推導出快速最優(yōu)控制綜合函數(shù)算法公式:
(10)
式(9)和(10)構成了TD的離散形式,可在工程應用中直接實現(xiàn)。
2.2LESO設計
假設有未知擾動作用的系統(tǒng)模型[12]為:

(11)
式中,f(x,ω,t)為系統(tǒng)的擾動,u(t)為控制量。構造降階LESO[12]如下:
(12)

2.3ADRC控制
(13)
降階LESO對系統(tǒng)擾動進行實時估計并予以動態(tài)補償后,便將式(11)的控制轉化為對一階積分環(huán)節(jié)的控制,然后再對u0選取適當控制策略(通常選取PD控制),這種控制方法即為ADRC。
2.4ADRC控制律設計
控制思想如下:設ωy_c為指令角速率,由式(8)將fω看作“干擾”。確定使ωy跟蹤ωy_c的控制:
(14)
式中,函數(shù)fTD_PD(ωy_c-ωy)是利用TD和PD控制設計的控制律,由式(15)給出:
fTD_PD(ωy_c-ωy)=Kpx1_TD+Kdx2_TD
(15)
式中,Kp和Kd分別為PD控制的比例系數(shù)和微分系數(shù)。x1_TD能最快跟蹤信號ωy_c-ωy,x2_TD是x1_TD的微分,x1_TD和x2_TD由式(16)TD給出:
(16)
式中,非線性函數(shù)fhan(x1_TD(k)-(ωy_c-ωy),x2_TD(k),r,h)由式(10)實現(xiàn)。
(17)
式(14)~(17)構成了框架式導引頭偏航通道穩(wěn)定回路角速率反饋控制。
ADRC控制回路如圖1所示,整個控制回路由TD,PD和LESO構成,可調控制參數(shù)為:r,h,Kp,Kd,βω。
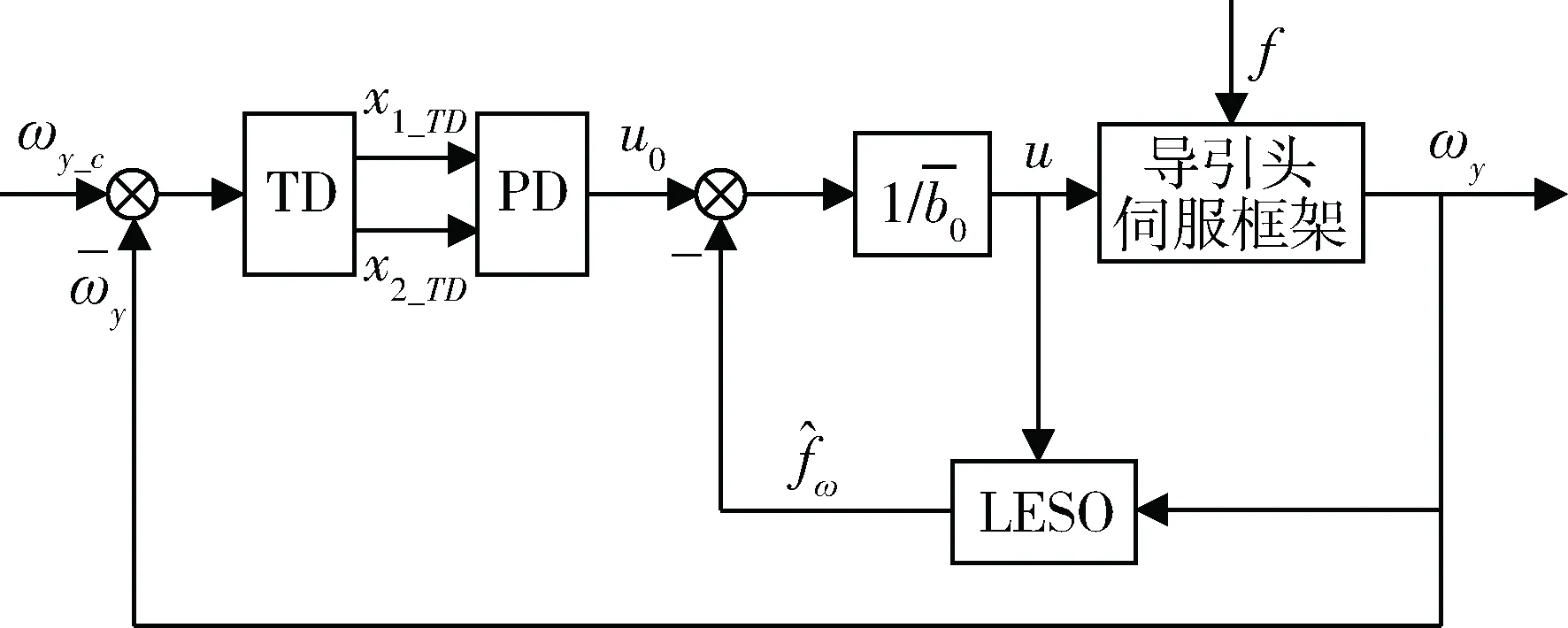
圖1 控制系統(tǒng)框圖
3 試驗驗證
利用某型精確制導炸彈的紅外框架式導引頭進行散態(tài)實物試驗的情況如下所述。伺服框架參數(shù)見表1。
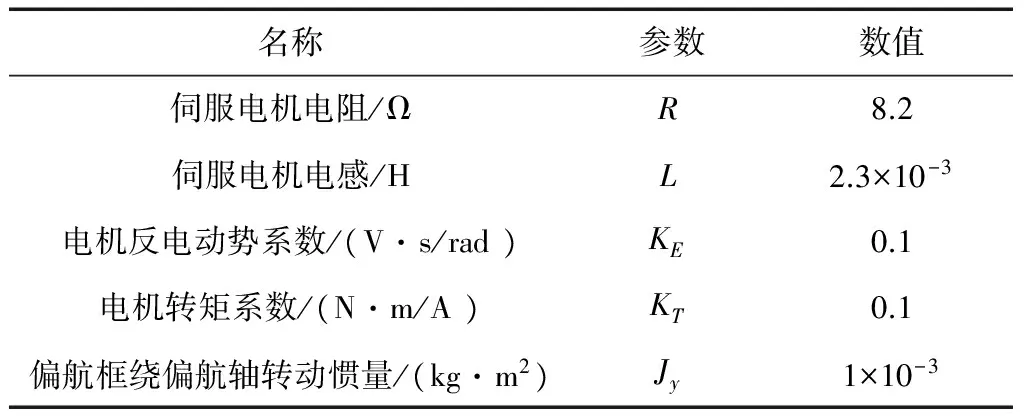
表1 伺服框架參數(shù)
框架干擾情況:偏航框轉動受到的擾動有導線拉扯力矩、偏航框質心偏差力矩、慣量耦合力矩和偏航軸摩擦力矩。試驗過程中,ωx=0,ωz=0,故慣量耦合力矩MJ_y=0;導線拉扯力矩、質心偏差力矩和摩擦力矩不易精確測得,而且當偏航框角速率換向時,機械軸摩擦力矩先由動摩擦力矩變?yōu)殪o摩擦力矩,后又突變?yōu)閯幽Σ亮兀异o摩擦力矩遠大于動摩擦力矩,框架在整個運動過程中,摩擦力矩的非線性特征非常明顯。
導引頭采用的MEMS陀螺噪聲較大,傳統(tǒng)PID控制若采用微分控制會進一步放大噪聲,故只用比例—積分控制,經調試得到PID最優(yōu)控制參數(shù)為:
KP=7,KI=500,KD=0。
ADRC控制參數(shù)選取為:
r=100,h=0.0015,Kp=12,
Kd=0.07,βω=600。
圖2為給定角速率指令:幅值為7(°)/s,頻率為1Hz的正弦波下,PID和ADRC對角速率控制效果的比較。PID控制下角速率跟蹤最大延時為58ms,而ADRC控制下跟蹤最大延時為24ms,最大延時處于角速率由0逐漸增大的過程中,產生延時是因為框架角速率過零時進入“死區(qū)”,需要較大的控制量克服靜摩擦力矩才能繼續(xù)運轉。
傳統(tǒng)PID控制在調參時,若要更快速地跟蹤上指令角速率,需要放大比例系數(shù)KP,但KP太大會出現(xiàn)“超調”現(xiàn)象,甚至導致控制系統(tǒng)振蕩發(fā)散。而ADRC通過TD安排合適的過渡過程并提取出高質量的微分信號,結合PD控制得到快速無超調的控制信號u0,較好地解決了角速率跟蹤過程中快速性與超調性之間的矛盾。
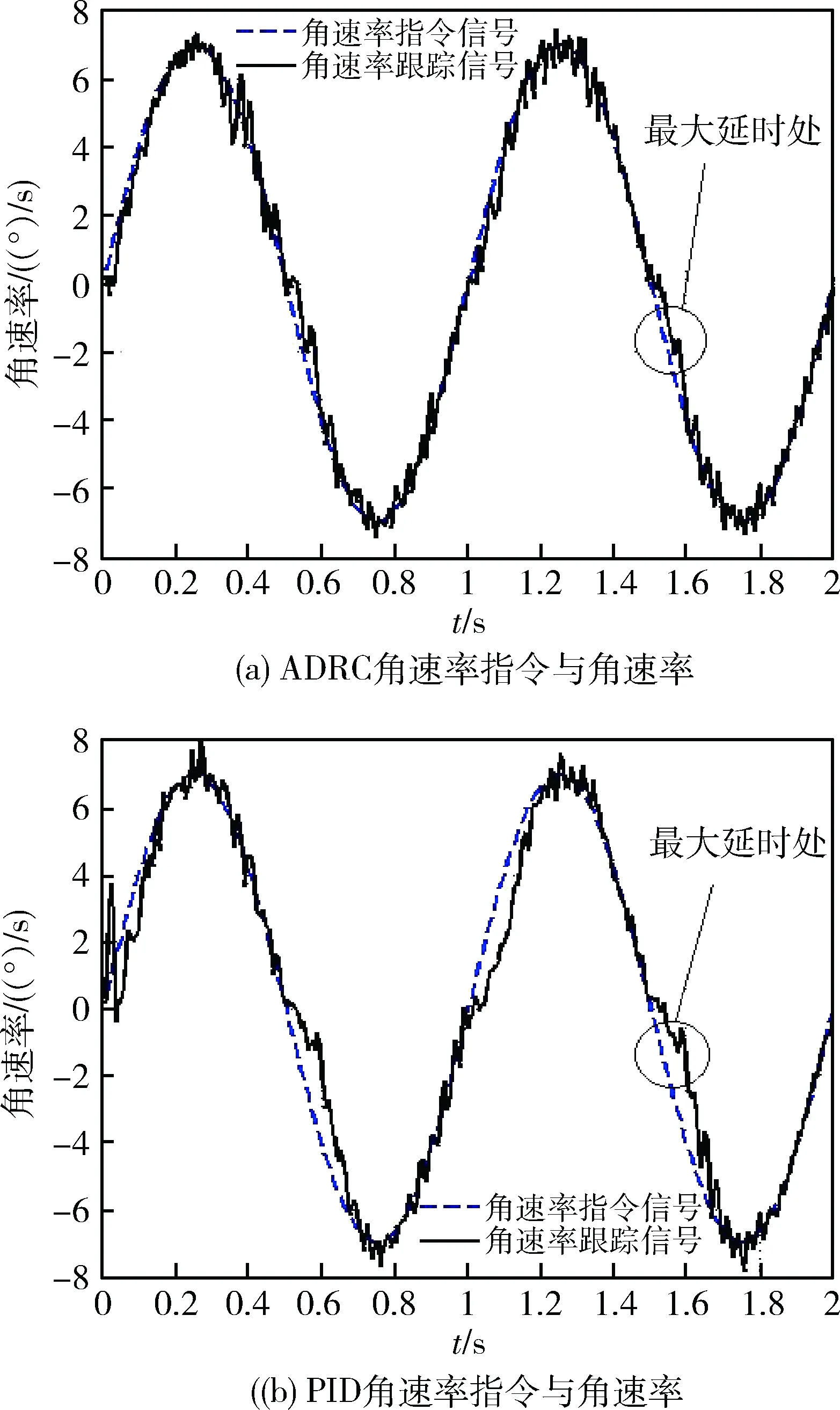
圖2 PID和ADRC控制曲線
而且,在整個控制過程中,LESO較好地估計了系統(tǒng)所受的總和干擾,圖3為給定角速率指令:7(°)/s,1Hz下,LESO實時估計的系統(tǒng)總和擾動。結合圖2容易發(fā)現(xiàn),估計干擾最大值處于角速率過0區(qū)段,此時摩擦力矩為較大的靜摩擦力矩,與實際情況相符。進一步分析:偏航框角速率為0時,LESO將實時估計出的較大干擾進行動態(tài)補償,得到較大的控制量u,使偏航框快速擺脫“死區(qū)”,提升了控制品質。
圖3 LESO對干擾的估計
圖4為給定角速率指令為0、基座繞偏航軸以幅值為2°,頻率為1Hz的角度轉動時,PID和ADRC控制下的視線角速率積分比較。求得PID控制下隔離度為7.5%,而ADRC控制下隔離度為3%,ADRC較PID大大降低了導引頭隔離度。
試驗表明,框架式導引頭偏航框穩(wěn)定回路控制中,ADRC能把偏航通道內由導線拉扯、質心偏差和機械軸摩擦等形成的總和干擾估計出來,并自動給
予有效地補償,大大降低了導引頭隔離度,有效提高了偏航通道的抗干擾能力,而且解決了角速率跟蹤過程中“死區(qū)”問題及快速性與超調性之間的矛盾,提升了偏航通道的控制品質。
圖4 ADRC和PID隔離度比較
4 結論
為了提高框架式導引頭的抗干擾能力,提出了ADRC穩(wěn)定控制設計方法。ADRC通過LESO實時估計出伺服框架運動過程中所受到的總和干擾,并進行動態(tài)補償,再利用TD和PD控制,大大降低了框架式導引頭的隔離度,提高了導引頭對復雜干擾條件的適應性。與經典PID控制相比較,ADRC控制品質優(yōu)勢明顯,顯示出了該設計方法在抗干擾控制領域的有效性、實用性以及先進性。
[1] 宋韜,林德福,祁載康. 平臺導引頭隔離度模型辨析[J]. 北京理工大學學報, 2013,33(6):575-580.(SongTao,LinDefu,QiZaikang.AnalysisontheModelsofSeekerDisturbanceRejectionRate[J].TransactionsofBeijingInstituteofTechnology, 2013,33(6):575-580.)
[2]GaoZhiqiang.ScalingandBandwidth-parameterizationBasedControllerTurning[C].ProceedingsofAmericanControlConference, 2003: 4989-4996.
[3]SunMingwei,ChenZengqiang,YuanZhuzhi.APracticalSolutiontoSomeProblemsinFlightControl[C].Proceedingsof48thIEEEConferenceonDecisionandControl, 2009: 1482-1487.
[4]YangRuiguang,SunMingwei,ChenZengqiang.ActiveDisturbanceRejectionControlonFirst-orderPlant[J].JournalofEngineeringandElectronics, 2011, 22(1): 95-102.
[5]FadaliMS.OntheStabilityofHan’sADRC[C]. 2014AmericanControlConference, 2014: 3597-3601.
[6] 宋金來,金岳. 制導炸彈滾轉通道自抗擾控制設計方法研究[J]. 航天控制,2014, 33(6):26-30.(SongJinlai,JinYue.ResearchofActiveDisturbanceRejectionControlforGuidanceMissilesControl[J].AerospaceControl, 2014, 33(6):26-30.)
[7] 宋金來,金岳,杜志偉,等. 擴張狀態(tài)觀測器在無人機縱向飛行控制中的應用[J]. 飛行力學,2008, 26(6):76-78.(SongJinlai,JinYue,DuZhiwei,etal.ExtendedStateObserverUsedinUAVLongitudinalFlightControl[J].FlightDynamics, 2008, 26(6): 76-78.)
[8] 李毅,陳增強,劉忠信. 自抗擾技術在四旋翼飛行姿態(tài)控制中的應用[J]. 哈爾濱工業(yè)大學學報,2014, 46(3):115-118.(LiYi,ChenZengqiang,LiuZhong-xin.AttitudeControlofaQuad-rotorRobotBasedonADRC[J].JournalofHarbinInstituteofTechnology, 2014, 46(3):115-118.)
[9] 張宇翔,宋金來,王明光,等. 制導炸彈俯仰通道自抗擾控制應用研究[J]. 導航與控制,2016, 15(1): 12-16.(ZhangYuxiang,SongJinlai,WangMingguang,et
al. Application of Actice Disturbance Rejection Control for Pitch Channel in Guided Bomb[J]. Navigation and Control, 2016, 15(1): 12-16.)
[10] 朱華征. 成像導引頭伺服機構若干基本問題研究[D]. 國防科學技術大學研究生院,2011.(Zhu Huazheng. Research on Several Essential Problems of Imaging Seeker Servo Mechanism[D]. Graduate School of National University of Defense Technology, 2011.)
[11] 韓京清. 自抗擾控制技術[M]. 北京:國防工業(yè)出版社,2008.(Han Jingqing. Active Disturbance Rejection Control Technique[M]. Beijing: National Defense Industry Press, 2008.)
[12] 薛文超. 自抗擾控制的理論研究[D]. 中國科學院研究生院,2012.(Xue Wenchao. On Theoretical Analysis of Active Disturbance Rejection Control[D]. Graduate University of Chinese, 2012.)
Application of Active Disturbance Rejection Control in Frame Seeker
Liu Xinyu, Song Jinlai, Jin Yue, Wang Rui, Zhang Yuxiang
Beijing Aerospace Institute of Microsystems, Beijing 100094, China
Basedonframeseekercontrolsystem,anactivedisturbancerejectioncontrol(ADRC)isdevisedtoensurethehighprecisionandhighreliability.Alinearextendedstateobserver(LESO)isproposedforon-lineestimationandcompensationoftheinternaldynamicsandexternaldisturbance,andtheplantdynamicsispredigestedtoagroupofintegrators.Then,theTDcontrolrateisdesignedbyutilizingtrackingdifferentiator(TD)andPDcontroller.TheexperimentalresultsindicatethatbetterdisturbancerejectionrateandmoreexcellentcontrolcharacteristicscanbeachievedinthedesignedcontrolsystemthanPIDcontroller.
PID;Activedisturbancerejectioncontrol(ADRC);Linearextendedstateobserver(LESO);Trackingdifferentiator(TD);Disturbancerejectionrate
2017-01-17
劉新宇(1994-),男,山西朔州人,碩士研究生,主要研究方向為飛行器制導與控制;宋金來(1965-),男,河北文安人,博士,研究員,碩士生導師,主要從事導航與控制技術研究;金 岳(1977-),男,江蘇泰興人,碩士,高級工程師,主要從事制導控制技術研究;王 睿(1981-),男,甘肅民勤人,碩士,高級工程師,主要研究方向為導航制導與控制;張宇翔(1990-),男,黑龍江大慶人,碩士,工程師,主要研究方向為飛行器制導與控制。
TJ765.3
A
1006-3242(2017)03-0009-05