基于遺傳算法的電動四驅汽車軸間扭矩分配控制策略
2017-07-31 20:54:31陳黎卿譚雨點
農業機械學報 2017年7期
陳黎卿 譚雨點 吳 榮 苗 偉 胡 芳
(1.安徽農業大學工學院,合肥230036;2.合肥工業大學機械與汽車工程學院,合肥230009)
基于遺傳算法的電動四驅汽車軸間扭矩分配控制策略
陳黎卿1譚雨點1吳 榮1苗 偉1胡 芳2
(1.安徽農業大學工學院,合肥230036;2.合肥工業大學機械與汽車工程學院,合肥230009)
為了提高純電動四輪驅動汽車的整車動力性和行駛穩定性,提出一種通過對汽車前后軸轉速差及車輪滑轉率實時觀測完成軸間扭矩重新分配的控制策略。通過Matlab/Simulink構建了整車動力學模型,并設計了基于遺傳算法(GA)和PID控制的軸間扭矩分配控制系統,分別在低附著均一路面、對接路面對整車加速性能進行了仿真分析。對該軸間扭矩控制系統進行軟硬件設計,并對開發的控制器進行了道路試驗。結果顯示運用該控制器及控制策略能較好地跟隨實時路況,使車輛動力性和行駛穩定性得到提升,試驗結果也驗證了控制系統的有效性。
純電動四驅汽車;軸間扭矩分配;遺傳算法;軟硬件設計;控制策略
引言
四輪驅動汽車可通過分動器或軸間差速器實現汽車前、后軸的扭矩分配,從而改善車輛行駛動力性和通過性,因此針對四輪驅動汽車的驅動力分配控制一直是研究熱點問題[1-5]。文獻[1-2]提出了一種全時四輪驅動汽車驅動輪牽引力綜合控制策略,在低附著路面上車輪過度滑轉時采用發動機輸出力矩控制和驅動輪制動控制的聯合控制。PANZANI等[3]通過發動機節氣門控制系統和軸間扭矩分配控制系統的聯合控制實現軸間扭矩的分配控制。胡建軍等[4]通過發動機目標轉矩控制和限滑差速器控制來調節各驅動輪的驅動力矩,并進行仿真分析。陳黎卿等[5]提出了一種基于人群搜索算法的四驅汽車扭矩分配控制策略,探討了軸間和輪間扭矩分配對整車行駛穩定性的影響。此外諸多學者還在混合動力汽車四輪扭矩控制策略在轉向控制和限滑等方面開展了研究,并取得了一系列研究成果[6-12]。通過對現有國內外學者研究成果分析可知,混合動力、傳統燃油汽車等類型車輛的驅動力分配控制策略研究已取得了顯著成果,但對于電動四驅汽車軸間動力分配以及控制系統研發尚需進一步研究。
采用合適的控制策略和設計良好的控制器是充分發揮控制對象性能的關鍵,但控制器參數較多,僅依靠現有經驗知識選擇和調試參數,很難設計出優良的控制器。對此吳光強等[13]將遺傳算法應用到對混合動力汽車的多參數優化問題中,取得了良好的效果。王威等[14]采用基于遺傳算法優化后的PID控制方法對汽車主動懸架進行控制取得了良好成效,提高了乘坐舒適性。因此,本文充分利用遺傳算法全局搜索能力,對PID控制器參數進行優化,并對優化前后的控制效果進行對比分析。
本文以純電動四驅汽車電控分動器為研究對象,創建整車動力學模型,在此基礎上研究軸間扭矩分配對整車性能的影響,并設計電控分動器控制策略和控制器軟硬件。
1 電動四輪驅動汽車模型建立
1.1 整車數學模型
由于汽車運動情況的復雜性,在建立整車動力學模型時,做以下簡化:忽略汽車加速和制動運行時的整車質心偏移。根據車輛的運動狀態和具體受力情況,四輪驅動汽車整車模型如圖1所示。
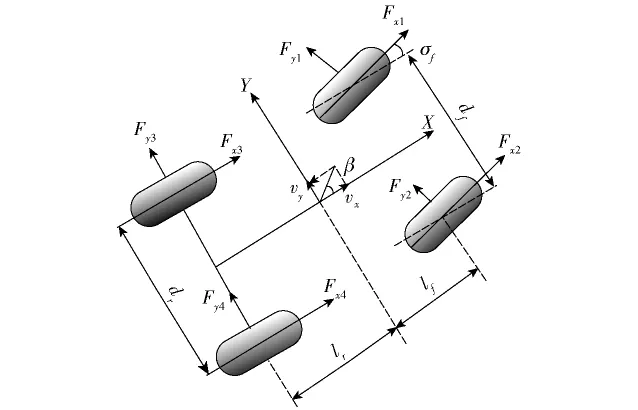
圖1 四輪驅動汽車整車模型Fig.1 Four-wheel drive automobilemodel
由圖1得整車動力學方程為

式中 m——整車質量 A——迎風面積
CD——空氣阻力系數
Jz——整車繞Z軸的轉動慣量
f1、f2、f3、f4——左前輪、右前輪、左后輪、右后輪的滾動阻力系數
Fz1、Fz2、Fz3、Fz4——左前輪、右前輪、左后輪、右后輪的動載荷
αx——縱向加速度 αy——側向加速度

Fx1、Fx2、Fx3、Fx4——左前輪、右前輪、左后輪、右后輪縱向力
Fy1、Fy2、Fy3、Fy4——左前輪、右前輪、左后輪、右后輪側向力
df、dr——前、后輪距
lf、lr——前、后輪與整車質心的距離
vx——縱向速度 vy——側向速度
σf——前輪轉角
1.2 傳動系統模型
文中討論的電動四驅汽車傳動系統結構示意圖如圖2所示,主要由電動機、變速器、分動器、前后主減速器、前后橋差速器、半軸及驅動輪等部件組成。
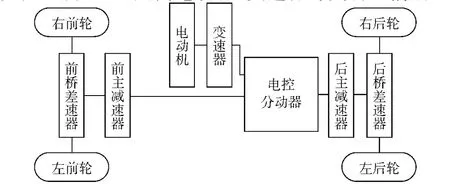
圖2 動力傳動系模型Fig.2 Power transmission system model
經電控分動器輸出的扭矩傳遞到前后驅動橋,其分配關系可表達為
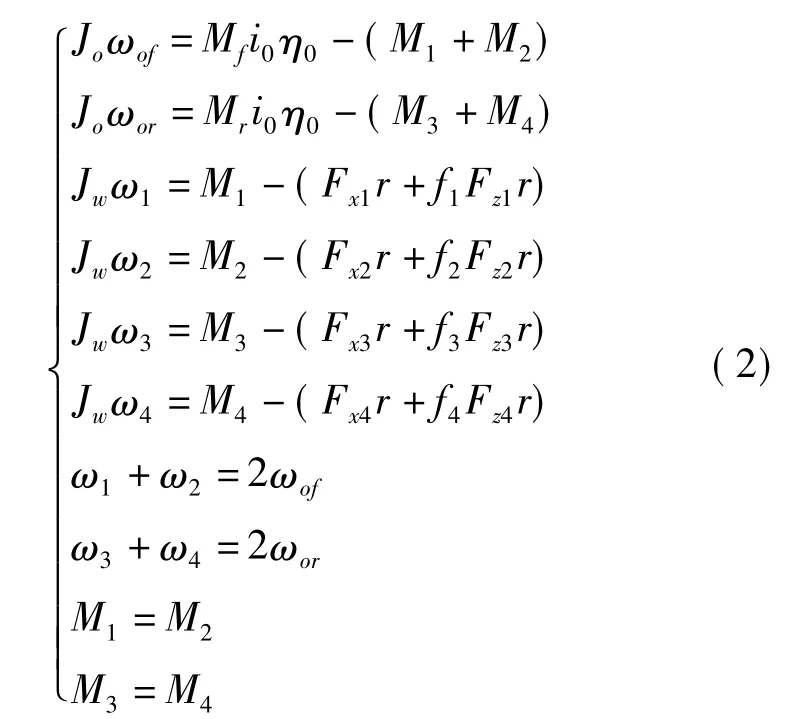
其中
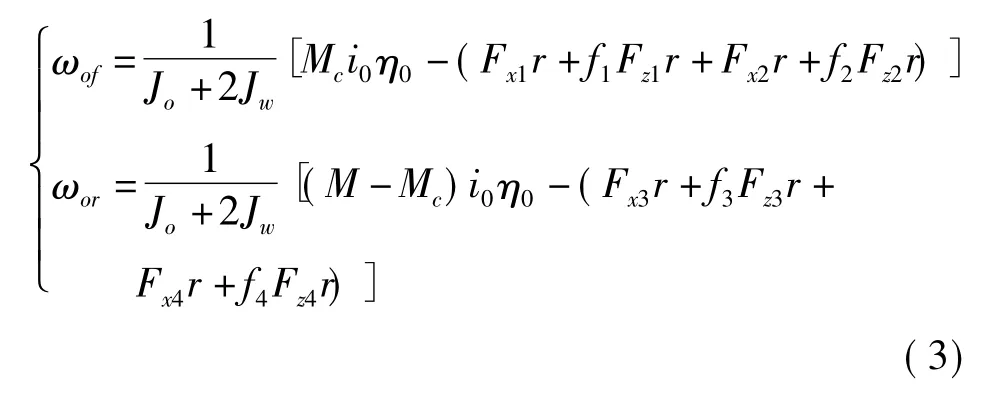
式中 Jo、Jw——傳動軸與主減速、半軸與車輪的轉動慣量
M——分動器輸入轉矩
Mc——分動器前輸出軸扭矩
Mf——前橋輸入扭矩
Mr——后橋輸入扭矩
i0——前后主減速器轉動比
η0——分動器到主減速器傳動效率
ω1、ω2、ω3、ω4——左前輪、右前輪、左后輪、右后輪的角加速度
M1、M2、M3、M4——左前輪、右前輪、左后輪、右后輪的轉矩
r——輪胎半徑
ωof、ωor——前后差速器殼體的角加速度
1.3 輪胎模型
由于主要考慮動力性影響,該特性主要由輪胎縱向附著力決定,故采用Dugoff輪胎模型。
驅動輪滑轉率為[13]

地面給車輪的驅動力為
式中 ω——驅動輪角速度
v——實際車速
μ——地面與輪胎之間的摩擦因數
c——輪胎縱向剛度
Fz——驅動輪輪荷
1.4 路面附著系數估計法
為了討論動力分配對整車動力性的影響,因此主要討論車輛直線行駛工況,忽略車輛的坡道阻力,根據縱向驅動力及行駛阻力模型可得

式中 Fw——空氣阻力 Ff——滾動阻力
Td——車輛驅動力矩
ax——車輛縱向加速度
根據車輛單輪模型得出車輪滾動方程

式中 Iw——轉動慣量 ωj——角加速度
可得車輛車輪與地面縱向作用力Fx

式中 kw——風阻系數
忽略側載荷轉移的情況,車輛所受垂向力為

式中 L1、L2——車輛質心與前、后軸的距離
hg——車輛的質心高度
g——重力加速度
路面附著系數的計算公式為

1.5 滑轉率計算
車輛行駛過程中,滑轉率和附著系數之間的關系可用KIENTCH[15]提出的模型公式表示

式中 p1、p2——不同路況下輪胎地面附著估計值
λ——車輪滑轉率
ε——調試系數
通過路面附著系數估計法和KIENTCH模型可得出當前路面的最優滑轉率[16]。通過實時監測前后輪的轉速差,調節電控分動器輸入的電流值進而改變前后軸轉矩的分配,提高行駛的動力性。
2 動力分配控制策略設計
2.1 電控分動器工作原理
電控分動器中的電磁離合器由控制離合器、濕式多片式離合器、銜鐵、線圈、主凸輪和球組成。它利用ECU(電子控制單元)控制通過線圈的電流使線圈、控制離合器產生電磁力,移動銜鐵使摩擦片被壓緊,通過產生的摩擦力矩使電控分動器實現扭矩的不同分配,根據輸出電流可產生相應的扭矩[17],電控分動器模型如圖3所示。
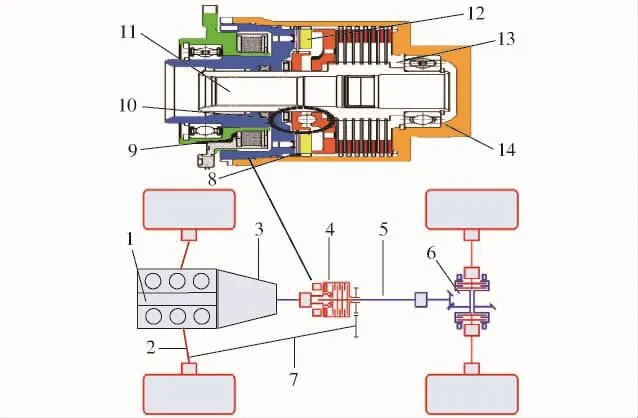
圖3 電控分動器模型Fig.3 Electronic control of actuatormodel
電控分動器產生的扭矩為

式中 Ms——電控分動器產生的扭矩
C——分動器本身的結構參數
I——電控分動器內線圈的電流
實車中經傳感器得到車速信號、加速度信號、前后軸的轉速信號;根據車輛模型部分的車速和軸速判斷車輛是否出現滑轉,然后計算出路面附著系數及目標滑轉率,ECU通過判斷前后的轉速差對分動器輸入電流進行扭矩分配,使其行駛的滑轉率盡量靠近目標滑轉率,最終使前后軸轉速相同。
2.2 控制策略設計
控制輸入量為誤差α(t)和輸出電流變化量ΔI。前后傳動軸角速度差為

式中 ω0f、ω0r——前、后差速器殼體的角速度
控制器輸入誤差為

式中 ωr0——目標轉速差,ωr0=0控制器輸出的電流變化量為

采用遺傳算法(Genetic algorithm,GA)對PID參數進行在線尋優,在前后軸存在轉速差時會實時控制輸出變量對前后軸的輸出轉矩自行修正,扭矩控制系統如圖4所示。圖中ωr1為前后軸轉速差。
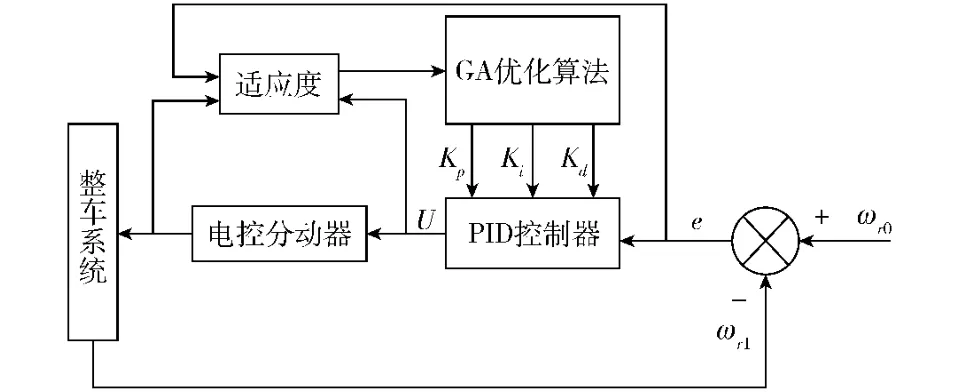
圖4 控制系統原理圖Fig.4 Principle block diagram of control system
2.3 不同路況的仿真分析
2.3.1 低附著系數路面仿真分析
設定附著系數為0.2的低附著均一路面,初速度為3m/s,結果如圖5所示。
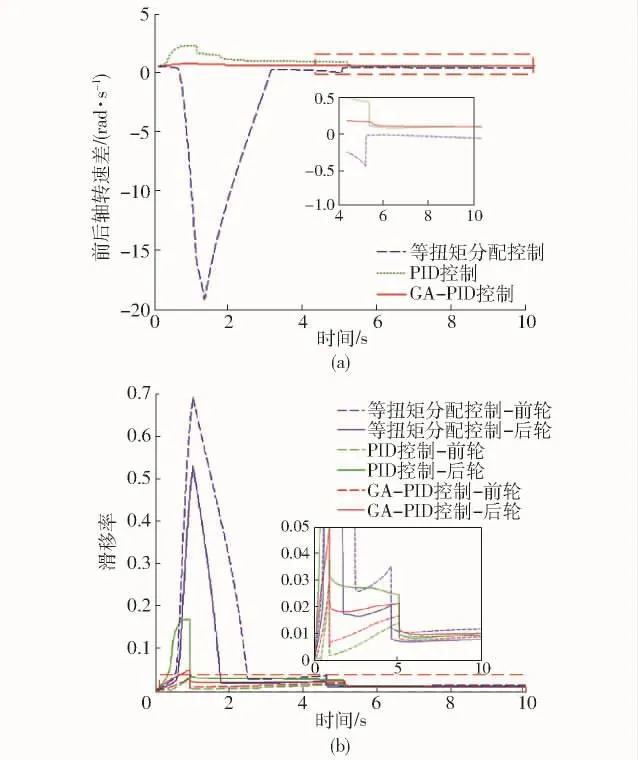
圖5 低附著系數仿真結果Fig.5 Simulation results of low adhesion coefficient
由圖5a可知等扭矩分配時,車輛在1.27 s時轉速差達到最大19.32 rad/s,說明前輪出現明顯的打滑;而PID控制轉速差最大時為1.74 rad/s,GA-PID為0.23 rad/s;因此GA-PID控制相對更好地抑制了車輪的打滑現象;圖5b中等扭矩分配時前輪滑轉率達到0.694,而后輪滑轉率為0.531,可以看出前輪打滑更為嚴重,由于前輪的動載荷更大,當分配同樣的力矩時,前輪更容易打滑;PID控制和GA-PID控制滑轉率都較低,兩者相比,PID控制時的后輪仍有部分滑轉,滑轉率最大為0.167。
2.3.2 對接路面仿真分析
在附著系數為0.8的高附著路面駛向附著系數為0.2的低附著路面,初速度為3 m/s時的結果如圖6所示。
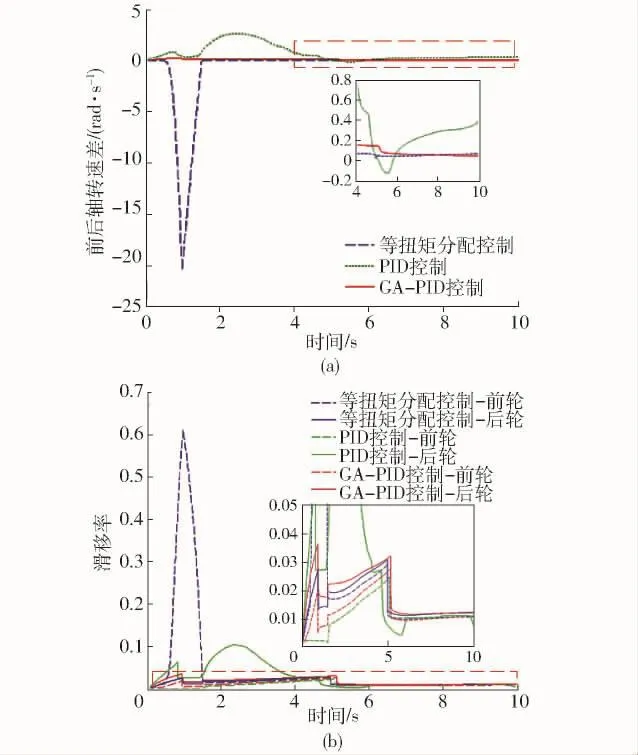
圖6 對接路面仿真結果Fig.6 Simulation results on split and opposite roads
對接路面仿真過程0.5 s時前輪從高附著路面到低附著路面,1.46 s時后輪從高附著路面到低附著路面。驅動輪從高附著路面進入低附著路面過程中由圖6a可知,等扭矩分配在0.97 s時驅動輪過度滑轉,前后轉速差達到最大20.31 rad/s。PID和GAPID控制都很好地抑制車輪打滑現象,PID控制轉速差最大為 2.61 rad/s,GA-PID為 0.21 rad/s;圖6b中等扭矩分配時前輪的滑轉率達到了0.604,同前一工況相比,此時的后輪沒有出現較明顯的打滑,由于后輪駛上低附著路面之前汽車已經換擋,輪胎產生的驅動力沒有超過地面附著力;PID控制和GA-PID控制都將滑轉率控制較低,PID控制的后輪滑轉率相對較大,在2.32 s時達到最大為0.103; GA-PID前后輪滑轉率均較低,抑制了驅動輪滑轉,相比其他2種控制效果較好。
3 試驗驗證
3.1 控制系統軟硬件開發
該控制系統硬件以MC9S12XS256CAA為控制核心,設計了控制器核心電路、電源電路、復位及BDM電路、電磁線圈驅動電路、輸出信號電路以及CAN總線通信電路,并對控制系統PCB硬件中增加了抗干擾設計。以CodeWarrior為平臺,對控制系統軟件框架、CAN總線通信程序、數據采集程序、PWM驅動程序等進行設計。分動器軸間扭矩控制系統硬件、軟件框架如圖7所示。
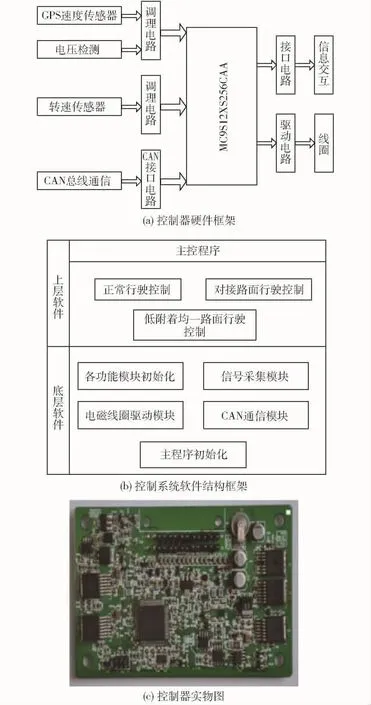
圖7 控制器Fig.7 Control system unit
3.2 試驗測試
為了對純電動四驅車輛軸間扭矩分配控制器及控制策略進行功能驗證,將開發的控制器安裝在自制電動四輪驅動汽車進行道路試驗,測試設備為VG440-200型慣性測量系統、KD-10AGPS型速度傳感器。
測試試驗方案:將開發的控制器安裝到自制四輪驅動試驗車上,在試驗車道總長為60m對接路面進行試驗,試驗路面0~30m為水泥路面,30~60m為冰面,試驗車起步加速通過水泥路面,通過冰面10m后進行制動至車輛停止。
測試試驗原理及條件:將各種傳感器、NI PXI主機、電源適配器、PC機等安裝到自制電動四驅車上進行試驗,通過傳感器測得數據信號傳遞到NI PXI-6122采集卡,并基于LabView編程的實車試驗數據采集系統進行實車數據采集,測試試驗原理如圖8所示。試驗的對接路面是從水泥路面駛向冰面進行的,試驗結果如圖9所示。
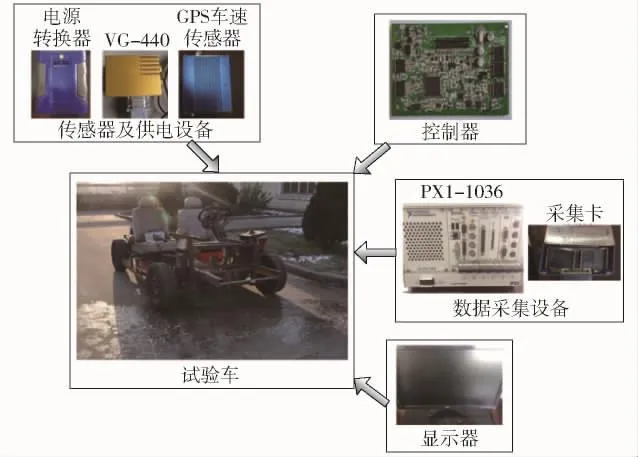
圖8 控制器實車試驗Fig.8 Real vehicle test of controller
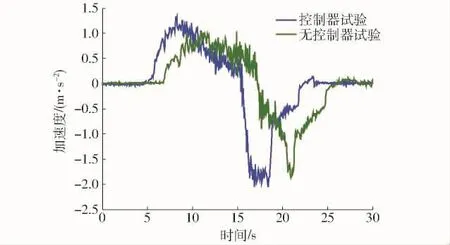
圖9 試驗車輛加速度Fig.9 Acceleration under different controls of test car
圖9為試驗車在水泥路面駛向冰面的道路試驗對比結果,四輪驅動試驗車在控制器控制下,前14.04 s是水泥路面行駛,4.47 s開始起步加速,其加速度最大值為1.334m/s2,14.04 s進入冰面后,路面附著力減小,使加速度緩慢降低,車輪無明顯打滑,15.49 s之后進行制動至試驗結束。而無控制器控制下試驗車6.48 s開始起步加速,14.10 s加速度最大值為1.032m/s2,16.64 s進入冰面,車輪出現明顯打滑,加速度出現急劇下降,17.18 s進行制動至試驗結束。通過試驗驗證可以得到,控制效果較好。
4 結論
(1)提出了基于GA-PID控制算法的扭矩分配控制策略,并對低附著均一路面及對接路面進行了仿真驗證,仿真結果表明該控制系統能較好改善汽車動力性及行駛穩定性。
(2)對基于GA-PID控制算法的扭矩分配控制系統進行軟硬件設計及部分性能調試,通過自制四驅汽車在試驗條件下對開發的控制器進行試驗驗證,結果表明運用該控制器及控制策略能夠使整車動力性得到有效改善。
1 高陽,李靜,趙健,等.全時四輪驅動汽車驅動輪牽引力綜合控制策略[J].吉林大學學報:工學版,2009,39(2):296-299.GAO Yang,LI Jing,ZHAO Jian,et al.Full time four wheel drive car wheel traction control strategy[J].Journal of Jilin University:Engineering and Technology Edition,2009,39(2):296-299.(in Chinese)
2 李靜,李幼德,趙健,等.四輪驅動汽車牽引力控制算法[J].機械工程學報,2006,42(2):141-144.LIJing,LIYoude,ZHAO Jian,et al.Four wheel drive vehicle traction control algorithm[J].Chinese Journal of Mechanical Engineering,2006,42(2):141-144.(in Chinese)
3 PANZANIG,CORNOM,TANELLIM,etal.Designing on-demand four-wheel-drive vehicles via active controlof the central transfer case[J].IEEE Transactions on Intelligent Transportation Systems,2011,11(4):931-941.
4 胡建軍,楊振輝,劉輝,等.四輪驅動汽車車輪驅動防滑的牽引力控制仿真分析[J].中國機械工程,2014,25(13):1817-1823.HU Jianjun,YANG Zhenhui,LIU Hui,et al.The simulation analysis of the traction control of the four wheel drive vehicle wheel drive[J].China Mechanical Engineering,2014,25(13):1817-1823.(in Chinese)
5 陳黎卿,胡冬寶,陳無畏.基于人群搜索算法的四驅汽車扭矩分配控制策略[J/OL].農業機械學報,2015,46(11):369-376.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20151150&flag=1.DOI:10.6041/j.issn.1000-1298.2015.11.050.CHEN Liqing,HU Dongbao,CHEN Wuwei.Population based search algorithm of the 4WD vehicle torque distribution control strategy[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2015,46(11):369-376.(in Chinese)
6 KIM D H,KIM JM,HWANG SH,et al.Optimal brake torque distribution for a four-wheel drive hybrid electric vehicle stability enhancement[J].Proc.IMechE Part D:Journal of Automobile Engineering,2007,221(11):1357-1366.
7 周奇勛,曹世宏,季新杰.ISG混合動力汽車控制規則優化與轉矩分配策略研究[J].汽車工程,2015,37(7):751-756.ZHOU Qixun,CAO Shihong,JIXinjie.Research on the control rules optimization and torque distribation strategy for ISG hybrid electric vehicles[J].Automobile Engineering,2015,37(7):751-756.(in Chinese)
8 趙治國,顧君,余卓平.四輪驅動混合動力轎車驅動防滑控制研究[J].機械工程學報,2011,47(14):83-98.ZHAO Zhiguo,GU Jun,YU Zhuoping.Study on the antislip control of hybrid electric car driven by fourwheel drive[J].Journal of Mechanical Engineering,2011,47(14):83-98.(in Chinese)
9 朱建新,鄭榮良,申其壯,等.四驅混合動力汽車車輪轉矩分配策略的研究[J].汽車工程,2010,35(11):967-971.ZHU Jianxin,ZHENG Rongliang,SHEN Qizhuang,et al.4WD hybrid electric car wheel torque distribution strategy study[J].Automobile Engineering,2010,35(11):967-971.(in Chinese)
10 李熙亞,吳誥,廖俊,等.汽車ABS制動過程的道路識別[J].華南理工大學學報:自然科學版,2006,34(4):24-27.LIXiya,WU Gao,LIAO Jun,et al.Road identification of automobile ABS braking process[J].Journal of South China University of Technology:Natural Science Edition,2006,34(4):24-27.(in Chinese)
11 錢立軍,邱利宏,陳朋.基于模糊PID扭矩識別的混合動力汽車優化控制[J].中國機械工程,2015,26(13):1752-1759.QIAN Lijun,QIU Lihong,CHEN Peng.Optimal control of hybrid electric vehicle based on fuzzy PID torque identification[J].China Mechanical Engineering,2015,26(13):1752-1759.(in Chinese)
12 姜立標,丘華川,吳中偉,等.四輪驅動汽車牽引力控制系統控制策略[J].北京航空航天大學學報,2016,42(11):2289-2298.JIANG Libiao,QIU Huachuan,WU Zhongwei,et al.Four wheel drive vehicle traction control strategy[J].Journal of Beijing University of Aeronautics and Astronautics,2016,42(11):2289-2298.(in Chinese)
13 吳光強,陳慧勇.基于遺傳算法的混合動力汽車參數多目標優化[J].汽車工程,2009,31(1):60-64.WU Guangqiang,CHEN Huiyong.Multi-objective optimization of hybrid vehicle parameters based on genetic algorithm[J].Automotive Engineering,2009,31(1):60-64.(in Chinese)
14 王威,薛彥冰,宋玉玲,等.基于GA優化控制規則的汽車主動懸架模糊PID控制[J].振動與沖擊,2012,22(3):157-162.WANGWei,XUE Yanbing,SONG Yuling,et al.Fuzzy PID control of vehicle active suspension based on GA optimal control rules[J].Vibration and Shock,2012,22(3):157-162.(in Chinese)
15 KIENTCH U.Realtime estimation of adhesion charcacteristic between tires and road[C]∥Proceedings of IFACWorld Congress,1993:15-18.
16 劉剛,靳立強,陳鵬飛.復雜工況下基于最佳滑移率的汽車牽引力控制算法[J].吉林大學學報:工學版,2016,46(5): 1391-1398.LIU Gang,JIN Liqiang,CHEN Pengfei.The traction control algorithm based on the optimal slip ratio under complex conditions[J].Journal of Jilin University:Engineering Science,2016,46(5):1391-1398.(in Chinese)
17 胡建軍,王銀,秦大同,等.基于軸間轉矩分配的四輪驅動汽車牽引力控制[J].華南理工大學學報:自然科學版,2010,38(1):108-112.HU Jianjun,WANG Yin,QIN Datong,et al.Wheel drive vehicle traction control based on the four wheel drive[J].Journal of South China University of Technology:Natural Science Edition,2010,38(1):108-112.(in Chinese)
Torque Distribution Control Strategy of Electronically Controlled Four-wheel Drive Axle Based on Genetic Algorithm
CHEN Liqing1TAN Yudian1WU Rong1MIAOWei1HU Fang2
(1.College of Engineering,Anhui Agricultural University,Hefei230036,China 2.School of Mechanical and Automobile Engineering,Hefei University of Technology,Hefei230009,China)
In order to improve the four-wheel drive vehicle dynamic performance and running stability,
an axis torque distribution control strategy was proposed through real-time observation of front and rear shaft speed difference and wheel slip ratio of the car.The vehicle dynamics model was constructed through the Matlab/Simulink,including transmission system model,tiremodel and sub-modules like slip ratio calculation module and motor model.The inter axle torque distribution control system and application was designed based on genetic algorithm(GA)and the PID control.On the low adhesion uniform pavement,docking road face to speed up performance of vehicle was simulated and analyzed.The hardware and software design of the shaft torque control system was carried out,and the development of the shaft torque control system was done,and the developmentof the controllerwas verified by the road test.The hardware and software design included the controller circuit and power circuit,and the control system of PCB harware increased the anti-interence design.Taking CodeWarrior as platform,the control system software framework,CAN bus communication program,data acquisition program,PWM driver were designed.The result showed that the controller and the control strategy can follow the real-time road conditionswell,so that the vehicle dynamic performance and stability were improved.The test resultalso verified the effectiveness of the control system.
electric four-wheel drive vehicle;axle torque distribution;genetic algorithm;software and hardware design;control strategy
U461.2;U469.72
A
1000-1298(2017)07-0361-07
2016-11-14
2017-01-04
國家自然科學基金項目(51305004)
陳黎卿(1979—),男,教授,博士,主要從事四驅汽車傳動系統設計研究,E-mail:lqchen@ahau.edu.cn
胡芳(1969—),女,副研究員,博士,主要從事四驅汽車傳動系統設計研究,E-mail:hufangbig@126.com
10.6041/j.issn.1000-1298.2017.07.046
猜你喜歡
能源工程(2020年6期)2021-01-26 00:55:22
鐵道通信信號(2020年9期)2020-02-06 09:15:22
山東冶金(2019年3期)2019-07-10 00:54:04
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
消費導刊(2018年10期)2018-08-20 02:57:02
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
通信電源技術(2016年1期)2016-04-16 04:57:26
