給水泵汽輪機組自動沖轉系統設計與實踐
2017-08-01 12:32:59羅培全張龍明陳喜龍
發電設備 2017年4期
羅培全,張龍明,陳喜龍
(神華國華舟山發電有限責任公司,浙江舟山 316012)
?
給水泵汽輪機組自動沖轉系統設計與實踐
羅培全,張龍明,陳喜龍
(神華國華舟山發電有限責任公司,浙江舟山 316012)
為了加強機組的安全運行,提出了給水泵汽輪機自動沖轉系統的設計方案。分析了該系統的控制范圍、特點、主要啟動步驟和設計關鍵點等。實踐證明該系統設計合理。
給水泵汽輪機; 自動沖轉; 設計
隨著國內大容量、高參數火電機組的發展,作為重要輔機的給水泵組占廠用電比例最大。從節能降耗及節省投資考慮,燃煤機組取消啟動電動給水泵,采用單臺汽動給水泵配置方案,完成從啟動到帶負荷以及停機整個發電過程是有必要的。為了減少操作員的勞動強度,提高機組啟停的快速性、運行的安全節能性、操作的規范性,筆者結合一臺超臨界350 MW機組單汽泵自動啟動實踐的經驗供同行參考。
1 汽動給水泵組工藝流程
該機組為國產350 MW超臨界燃煤機組。其給水系統的配置上采用單臺100%汽動給水泵組,取消30%電動啟動給水泵的方案。給水泵組布置方式為高位布置,中心線與主汽輪機中心線平行,其汽輪機排汽方式為下排汽,采用彈性隔震基礎設計。主給水泵采用國產泵組,芯包進口。
汽動給水泵組工藝流程屬于比較復雜的輔助系統,與汽動給水泵組相關的設備有水側的給水系統、汽側的動力蒸汽系統以及潤滑油系統。動力蒸汽系統見圖1。
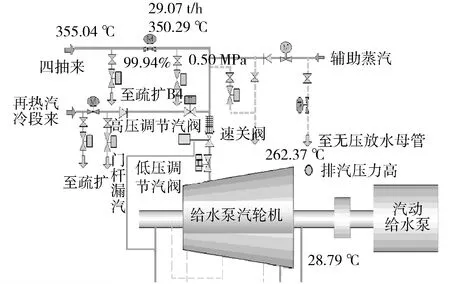
圖1 給水泵汽輪機系統圖
汽動給水泵啟動用汽來自鄰爐的輔助蒸汽系統,當本機組負荷升到50%時,通過汽源切換至本機的四段抽汽供汽。在停爐過程中,當負荷降至30%時切換至輔助蒸汽,直到機組解列。
2 自動沖轉系統控制范圍及特點分析
2.1 自動沖轉系統控制范圍
給水泵汽輪機自動沖轉系統具有嚴格步序且融合了部分閉環調節回路的功能組。如何最優地確定功能組控制設備范圍至關重要,它關系著該功能組的適用性和易用性。這些設備的具體確定必須依據機組特定工藝流程、系統運行規律及長期的運行經驗。常規的做法是以重要輔機為中心,將屬于同一系統的設備組合在一起[1]。依據這些原則確定自動沖轉系統的設備范圍,包括輔汽至給水泵汽輪機用汽管道疏水門、給水泵汽輪機疏水門、主給水旁路電動調節門、主給水電動門、給水泵再循環調節門、給水泵汽輪機油系統、汽輪機給水泵組。
2.2 啟動思想
給水泵汽輪機沖轉功能組主要完成給水泵汽輪機動力汽源的投入、沖轉至最低遙控轉速,使其從靜止狀態沖轉至備用狀態。為防止給水泵汽蝕,在給水泵沖轉前開啟給水泵再循環調節門,關閉主給水電動門和給水旁路電動調節門。在調整好本體疏水門、輔汽管道疏水門、核實給水泵汽輪機啟動條件后,由ATR程序判斷給水泵汽輪機的狀態,然后根據泵組狀態計算沖轉升速率、暖機時間,最終升速至最低遙控轉速,并完成給水泵汽輪機MEH遙控的投入。
啟動功能邏輯圖見圖2。
2.3 功能組啟動允許條件
功能組啟動允許條件,主要對給水泵汽輪機相關油系統、除氧給水系統、真空系統、軸封系統進行全面檢查,核實這些系統是否具備沖轉給水泵汽輪機的要求。主要條件至少包括:
檢查卡執行完畢,主要檢查相關系統的手動門等是否滿足條件;鍋爐給水前置泵已經啟動;給水泵潤滑油油壓正常;給水泵調節油油壓正常;給水泵汽輪機軸封供汽壓力正常;凝汽器壓力低于中間值;除氧器水位正常。
2.4 主要啟動步驟
給水泵汽輪機自動啟動系統首先進行功能組啟動允許條件的判斷,包括給水泵汽輪機軸封供汽壓力正常;前置泵已經合閘;給水泵汽輪機潤滑油壓力正常;給水泵汽輪機調節油壓力正常;除氧器水位正常;凝汽器壓力小于-76 kPa。功能組第一步,置給水泵再循環調節門100%,關閉給水旁路電動調節閥和主給水電動門;第二步,開給水泵汽輪機本體疏水閥和輔汽用汽電動門前疏水閥,包括給水泵汽輪機高壓缸疏水閥、汽缸平衡管疏水閥、汽封母管疏水閥、低壓缸疏水閥、輔汽供汽電動門前疏水閥、四抽供小機電動門后疏水閥;第三步,開輔汽供小機用汽電動門;第四步,等待延時,確保MEH和DCS側均準備好沖轉條件;第五步,復位給水泵汽輪機控制系統;第六步,開給水泵汽輪機本體疏水閥和輔汽用電動門前汽疏水閥;第七步,投大氣擴容器A、B側入口液動調節門自動。
2.5 檢查卡設計
功能組本質上是一種帶工藝設備操作的程序流,和傳統的手動操作存在較大的差異,在手動啟動過程中,運行人員啟動某一設備,會在啟動后檢查設備運行情況,如果發現異常,則可以暫緩、停止下一步的操作,而程序沒有人工這么智能,所以必須在程序流開始之前仔細、嚴謹檢查,確保在程序流啟動之前設備正常。
檢查卡設計需要包括如下幾點:確認給水泵、給水泵汽輪機所有相關系統工作票已經全部終結;熱控表計投入,顯示正常;所有執行機構已經送電;所有手動門已經為啟動準備狀態,并具體列出閥門清單。
2.6 DCS側給水泵汽輪機遙控啟動條件設計
由于機組DCS和MEH不在同一套硬件系統中,所以需要分別設計DCS側邏輯和MEH側邏輯。 在給水泵汽輪機進蒸汽前全面判斷相關系統是否具備沖轉條件,包括三個方面內容:(1)工藝系統具備條件;(2)熱控儀表監測正常;(3)控制調節回路正常。
工藝系統檢測項目:給水泵汽輪機系統就緒;四級抽汽至給水泵汽輪機壓力正常;給水泵汽輪機潤滑油油壓正常;給水泵汽輪機調節油油壓正常;給水泵汽輪機排氣壓力正常;給水泵汽輪機軸封供汽壓力正常;除氧器水位正常;鍋爐給水前置泵已經運行;給水泵上下筒體溫度差小于20 K;除氧器與下筒體溫度差小于50 K;給水泵汽輪機汽封管疏水閥已打開;給水泵汽輪機低壓缸疏水閥已打開;給水泵汽輪機高壓缸疏水閥已打開;給水泵汽輪機平衡管疏水閥已打開。熱控儀表監測項目:無METS報警信號;無跳閘保護條件;給水泵汽輪機MTSI系統正常。控制調節回路項目:給水流量無故障;給水泵汽輪機遙控設定無故障;給水泵汽輪機轉速正常。
2.7 功能組沖轉完成條件
功能組的完成條件包括:轉速大于3 000 r/min;頂軸油泵已經停運;大氣擴容器A側入口液動調節門自動已經投入大氣擴容器B側入口液動調節門自動已經投入。
2.8 MEH側邏輯設計
常規MEH主要控制方式有三種:手動運行方式、轉速自動控制、CCS轉速控制。手動運行方式為MEH系統的后備方式,當系統工作不正常而伺服閥模件還能正常工作時,可由運行人員在0~6 000 r/min范圍內手動操作,達到控制轉速的目的。手動方式就是直接操作閥門開度指令來控制閥門開關,開環調節轉速。在轉速自動控制方式,給水泵汽輪機轉速自動主要通過操作員給出的轉速設定值,轉速閉環回路控制汽輪機的轉速。在此方式下,操作員按給水泵汽輪機的理想升速曲線控制升速。初始設定點以設定的速率控制轉速到目標值,目標轉速和升速率可由運行人員在操作員站上設置。CCS轉速控制方式即鍋爐給水自動方式。CCS給出4~20 mA給水量需求指令轉換為轉速設定值,再通過轉速閉環回路控制給水泵汽輪機轉速。三種控制方式的切換通過互相之間的自動跟蹤,由邏輯判斷實現無擾切換。
目前國內火電機組,給水泵汽輪機的沖轉大多采用操作員多次干預下的轉速自動控制方式,操作員人工判斷沖轉條件,手動設定升速率、目標轉速,達到暖機轉速后進行暖機,暖機到一定程度后再次升速至最低遙控轉速,在達到最低遙控轉速(一般為3 000 r/min)后由操作員在DCS與MEH之間進行手動的遙控投入和撤出。給水泵汽輪機自動啟動系統MEH側設計就是要解決沖轉條件判斷,升速暖機過程程序化,自動升速及遙控啟動、遙控投入、升速、暖機等問題。
2.8.1 MEH側遙控啟動允許
MEH首先進行狀態確認,在沒有超速試驗,給水泵汽輪機轉速無故障,無給水泵汽輪機遙控退出按鈕,給水指令正常的情況下,確認遙控啟動允許條件滿足,并發條件滿足信號至DCS側的順控主程序。圖3為給水泵汽輪機遙控允許邏輯圖。

圖3 給水泵汽輪機遙控允許邏輯圖
2.8.2 遙控已經投入
MEH在收到順控主程序發來的遠程啟動指令與給水泵汽輪機遙控允許且沒有遙控退出請求且無轉速通道故障置位給水泵汽輪機遙控已投入。當遙控退出按鈕、給水泵汽輪機遙控允許不滿足、給水泵轉速低中的其中一個條件不滿足時,復位給水汽輪機遙控已投入。圖4為給水泵汽輪機遙控已投入邏輯圖。
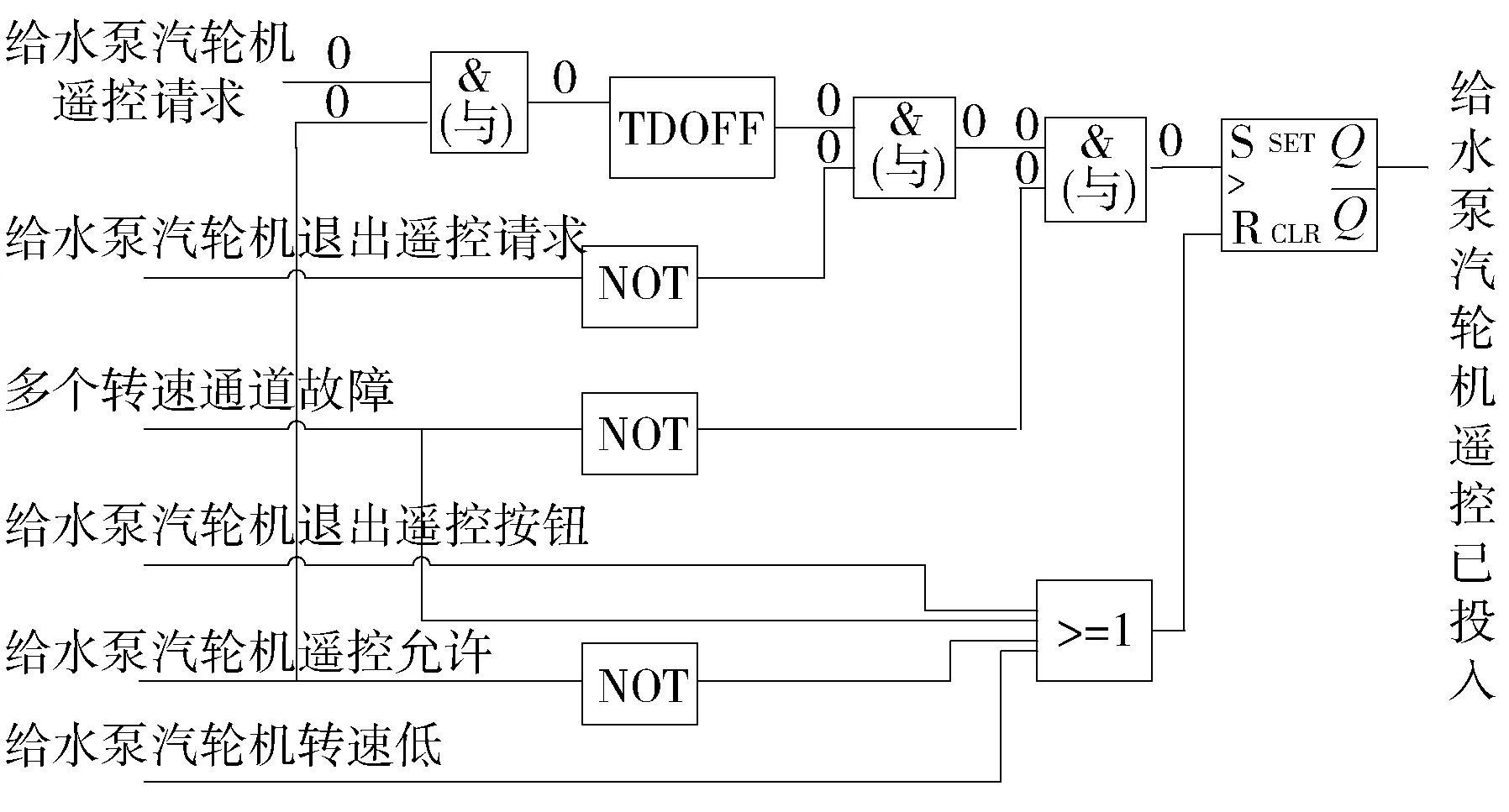
圖4 給水泵汽輪機遙控已投入邏輯圖
2.8.3 MEH側沖轉程序設計
升速率生成回路見圖5。

圖5 升速速率形成回路
汽動給水泵汽輪機沖轉子組第一步復位、掛閘。確認掛閘成功后,判斷泵組的狀態為冷態、溫態還是熱態。再根據給水泵汽輪機的汽輪機啟動曲線,計算暖機時間,生成給水泵汽輪機升速速率,再根據升速率生成給水泵汽輪機的轉速設定值,由轉速設定值和實際轉速進行PID的閉環運算,形成給水泵汽輪機的高低壓調門指令,控制給水泵汽輪機的轉速,最終調節給水流量。
由圖5可見:在沖轉初期且投入ATR模式,由D處的減法塊輸出為ATR目標RPM(3000)值減去轉速設定值,通過A處的絕對值模塊,輸出B大于2處下來的ATR升速率,最終選擇最右側分支的回路,形成最終的給水泵汽輪機升速率。當汽輪機轉速升高至近3 000 r/min時,A處的ABS模塊輸出會比較小,通過C處的小選模塊,最終形成給水泵汽輪機升速率。
3 自動沖轉系統特點
3.1 順序控制和保護聯鎖的獨立設計
無論是順控還是聯鎖保護邏輯,控制對象最終統一到電動執行機構、泵等設備。做到自動啟動系統邏輯和保護聯鎖的完全分離至關重要,鑒于設備可靠性的要求,可以在順控系統的設計中只涉及設備的啟停操作,不對單體設備的跳閘條件進行修改。為避免設備的損壞,設備的啟動允許條件必須嚴格、謹慎[1]。設備的聯鎖邏輯關系遵照常規機組進行設計[2]。
3.2 順序控制和調節控制一體化設計
功能組的順序控制所納入的設備有開關量控制設備,包括設備的開、關、啟、停,進行兩位或三位控制。此外還包括模擬量控制設備,如給水調節門、給水泵再循環調節門。調節控制的控制對象為這些模擬量設備,正常情況下,它擔當閉環調節的基本功能,但在系統啟動、停止過程中,這些設備必須控制到一定狀態,以滿足下一步程序操作的需要[3]。
4 結語
機組經深度調試表明:系統邏輯完善合理,完全具備投入使用的條件。實踐證明給水泵汽輪機的自啟動系統的設計方案合理,其是DCS廠家、調試單位、施工安裝單位、業主方APS項目組成員共同努力的結果,此系統的成功應用減少了機組運行人員的操作內容,規范了設備的啟動過程,減輕了運行人員的勞動強度。此系統的成功應用為機組級的自啟停系統(APS)成功打下堅實的基礎,也為同類機組在實施給水泵汽輪機自動啟動提供一種可以借鑒的經驗。
[1] 華東六省一市電機工程(電力)學會. 熱工自動化[M]. 北京: 中國電力出版社,2000.
[2] 潘鳳萍,陳世和,陳銳民,等. 火力發電機組自啟停控制技術及應用[M]. 北京: 科學出版社,2011.
[3] 熊澤生. 給水泵組順序控制及調節控制設計和調試分析[J]. 湖北電力,2004,28(5): 16-18.
Design and Application of Automatic Impulse System for a Feed-water Pump Turbine
Luo Peiquan,Zhang Longming,Chen Xilong
(Shenhua Guohua Zhoushan Power Generation Co.,Ltd.,Zhoushan 316012, Zhejiang Province,China)
To secure the safety operation of a power unit,an introduction is presented to the design scheme of its automatic impulse system for the feed water pump turbine,together with an analysis on the control range,key start-up procedures and key design points of the system,which has been proved to be reasonable by actual applications.
feed-water pump turbine; automatic impulse; design
2016-09-18;
2016-11-17
羅培全(1976—),男,高級工程師,主要從事火力發電廠熱控及工業自動化技術管理及研究。
E-mail: luopeiquan@163.com
TK323
A
1671-086X(2017)04-0300-05
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年5期)2021-01-04 01:29:00
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(2017年9期)2017-09-26 03:41:45
廣西電力(2016年4期)2016-07-10 10:23:38
工業設計(2016年4期)2016-05-04 04:00:23
工業設計(2016年12期)2016-04-16 02:52:00
