導(dǎo)彈供電控制組合故障預(yù)測(cè)方法研究
2017-08-04 19:20:28霍曉云楊立峰鐘
宇航計(jì)測(cè)技術(shù) 2017年3期
關(guān)鍵詞:故障
霍曉云楊立峰鐘 恒
(1.北京機(jī)械設(shè)備研究所,北京 100039;2.海軍駐北京地區(qū)艦空導(dǎo)彈系統(tǒng)軍事代表室,北京 100039)
導(dǎo)彈供電控制組合故障預(yù)測(cè)方法研究
霍曉云1楊立峰2鐘 恒1
(1.北京機(jī)械設(shè)備研究所,北京 100039;2.海軍駐北京地區(qū)艦空導(dǎo)彈系統(tǒng)軍事代表室,北京 100039)
通過分析導(dǎo)彈供電控制組合核心控制部件的故障機(jī)理,選定導(dǎo)彈供電控制繼電器作為關(guān)鍵研究對(duì)象,利用時(shí)間序列分析方法建立繼電器的故障預(yù)測(cè)數(shù)學(xué)模型,并通過超程時(shí)間和吸合時(shí)間兩種特征量對(duì)預(yù)測(cè)數(shù)學(xué)模型進(jìn)行辨識(shí),分析了基于兩種特征量的壽命預(yù)測(cè)計(jì)算結(jié)果。搭建實(shí)驗(yàn)室特征參數(shù)采集裝置進(jìn)行實(shí)際工況模擬,試驗(yàn)結(jié)果驗(yàn)證了預(yù)測(cè)結(jié)果的正確性。
導(dǎo)彈供電控制組合 故障預(yù)測(cè) 時(shí)間序列分析
AbstractIn this paper,the relay was selected as a key part by analyzing the fault modes of missile power supply control unit.Based on time series analysis,the mathematical model for fault forecasting was built,and the mathematical model was identified for super-path time and pick-up time of relays.The computing results were obtained and analyzed by comparing the model based on super-path time with pick-up time.The test device of parameter collecting was designed to simulate the loads under the actual working condition.And the forecasting result was validated by the experiment data.
Key wordsMissile power supply control unit Fault forecasting Time series analysis
1 引言
隨著現(xiàn)代武器裝備性能的不斷提高,裝備系統(tǒng)組成的復(fù)雜性不斷增加,系統(tǒng)故障診斷、維修保障等工作的難度也日益增大。武器裝備的維修保養(yǎng)是個(gè)復(fù)雜的過程,項(xiàng)目繁多,故障形式多樣。傳統(tǒng)的維護(hù)方式是對(duì)武器裝備進(jìn)行定期維護(hù)和故障后更換維修,存在非正常使用下器件加速退化或損傷不能及時(shí)識(shí)別、對(duì)功能沒有明顯退化的器件(組合)進(jìn)行定期更換將產(chǎn)生嚴(yán)重的浪費(fèi)和增加額外的維修費(fèi)用、基于實(shí)際更換數(shù)據(jù)的備件消耗分析不準(zhǔn)確導(dǎo)致供給量難以衡量等問題。鑒于傳統(tǒng)維護(hù)方式的不足,武器裝備開始采用“視情維修”的方式對(duì)裝備進(jìn)行故障預(yù)測(cè),即通過檢測(cè)裝備的狀態(tài)來預(yù)測(cè)系統(tǒng)及其部件的故障情況,并確定部件的剩余壽命,從而對(duì)維修活動(dòng)做出管理和決策。
導(dǎo)彈供電控制組合主要功能是響應(yīng)計(jì)算機(jī)的指令,控制繼電器組合進(jìn)行電路切換,將來自地面供電電源的電能輸出到筒彈,按照武器需要的加電時(shí)序?qū)崿F(xiàn)武器的供電控制。作為直接給武器供電的設(shè)備,如果發(fā)生故障將直接導(dǎo)致發(fā)射流程異常,因此采用“視情維修”方式對(duì)導(dǎo)彈供電控制組合進(jìn)行健康狀態(tài)管理具有十分重要的意義。
本文以導(dǎo)彈供電控制組合為研究對(duì)象,根據(jù)裝備組成及特點(diǎn)對(duì)其故障模式進(jìn)行分解,最終選定繼電器作為故障預(yù)測(cè)對(duì)象,利用時(shí)間序列分析方法建立繼電器故障預(yù)測(cè)數(shù)學(xué)模型。設(shè)計(jì)了一套實(shí)驗(yàn)室特征參數(shù)采集裝置進(jìn)行典型工況加載試驗(yàn)分析,該裝置能夠模擬實(shí)際負(fù)載加載瞬間的電流沖擊,連續(xù)采集導(dǎo)彈供電控制組合每次吸合瞬間至供電穩(wěn)定過程的線圈電壓/電流、觸點(diǎn)電壓/電流、超程時(shí)間、吸合時(shí)間等特征參數(shù)。利用實(shí)測(cè)結(jié)果對(duì)預(yù)測(cè)模型進(jìn)行辨識(shí),最后通過試驗(yàn)結(jié)果對(duì)預(yù)測(cè)模型進(jìn)行驗(yàn)證。
2 故障機(jī)理分析
2.1 導(dǎo)彈供電組合的故障特征
導(dǎo)彈供電控制組合由I/O調(diào)理板、繼電器組合、面板組合、底板組合組成。根據(jù)以往積累的可靠性數(shù)據(jù),導(dǎo)彈供電控制組合故障原因主要包括I/O調(diào)理板故障和繼電器故障。I/O調(diào)理板直接控制導(dǎo)彈供電控制組合繼電器的動(dòng)作,一般在系統(tǒng)內(nèi)部采取冗余設(shè)計(jì)提高任務(wù)的可靠性,可以有效降低板卡故障后對(duì)系統(tǒng)任務(wù)的影響。同時(shí)在系統(tǒng)維護(hù)時(shí)能夠在線監(jiān)測(cè)I/O調(diào)理板的狀態(tài),能夠?qū)崟r(shí)地獲取I/O調(diào)理板的健康狀態(tài)。
武器系統(tǒng)中有需要按照時(shí)序加電的多種功率負(fù)載設(shè)備,由于繼電器是具有隔離功能的自動(dòng)化開關(guān)元件,因而被廣泛應(yīng)用于導(dǎo)彈供電控制組合中。由于實(shí)際使用工況不同,繼電器的實(shí)際動(dòng)作壽命與出廠指標(biāo)有較大的差別;另一方面,產(chǎn)品在選型時(shí)考慮可靠性及降額要求,往往選擇更高耐流等級(jí)的繼電器,如果不判斷繼電器自身特征量的狀態(tài)而僅以出廠壽命為依據(jù)進(jìn)行更換將會(huì)造成較大的浪費(fèi)。因此,建立繼電器的故障預(yù)測(cè)模型對(duì)于分析導(dǎo)彈供電控制組合的健康狀態(tài)、提升任務(wù)可靠性、實(shí)現(xiàn)精確保障要求是非常必要的。
2.2 繼電器的故障模式分析
根據(jù)電磁繼電器的功能特性和結(jié)構(gòu)特點(diǎn),由觸點(diǎn)失效引起的該合不合失效(斷開失效)和該斷不斷失效(粘結(jié)失效)是繼電器的主要失效形式。觸點(diǎn)作為繼電器的重要部位,較易受到侵蝕破壞,是繼電器的主要失效模式,占總失效的80%以上。引起這兩種失效模式的原因多種多樣,如表1所示。除此之外,其他失效一般是由設(shè)計(jì)、生產(chǎn)或工藝缺陷造成的,在可靠性篩選試驗(yàn)中可將存在這些失效模式的產(chǎn)品剔除。

表1繼電器失效模式及失效機(jī)理
供電控制組合中使用的繼電器的應(yīng)用場(chǎng)合具有高精確性和高可靠性的要求,一種失效判據(jù)是斷開失效和粘接失效等功能性的“硬失效”;為了保證武器裝備的可靠性,當(dāng)某些參數(shù)超出規(guī)定的范圍或動(dòng)作過程發(fā)生異常,也應(yīng)判為失效。此時(shí),繼電器的循環(huán)閉合和開斷功能仍然正常,這種失效常稱為“軟失效”。將“軟失效”作為導(dǎo)彈供電組合的失效判據(jù),發(fā)揮故障預(yù)測(cè)的優(yōu)勢(shì),在發(fā)生“硬失效”之前實(shí)施維修或更換。
2.3 繼電器壽命預(yù)測(cè)特征參數(shù)的選取
繼電器壽命預(yù)測(cè)是指在繼電器可靠性設(shè)計(jì)、生產(chǎn)及制造過程中嚴(yán)格控制其失效模式,即在不存在早期失效和使用期偶然失效的前提條件下,研究其某些特征參數(shù)內(nèi)在物理變化的規(guī)律,主要是研究磨損失效的物理過程,一般通過繼電器可靠性壽命試驗(yàn)來考核繼電器在工作時(shí)觸點(diǎn)的電器耐磨情況。
表征繼電器觸點(diǎn)健康狀態(tài)的特征參數(shù)主要有接觸電阻、表面粗糙度、損耗質(zhì)量和頻譜、有效接觸距離等[1,2]。其中,接觸電阻很難獲得較高的測(cè)量準(zhǔn)確度;觸點(diǎn)磨損量測(cè)量繁瑣,耗費(fèi)人力物力較大;損耗質(zhì)量和頻譜較難在線測(cè)量和分析,尤其不適用于密封繼電器;繼電器自由行程和超程測(cè)量方法煩瑣,且也無法在線測(cè)量,所以上述特征參數(shù)的實(shí)用性均較差。而繼電器的超程時(shí)間和吸合時(shí)間可以定量描述觸點(diǎn)超程和自由行程的變化,并且較容易測(cè)出,且隨著繼電器動(dòng)作次數(shù)的增加分別呈現(xiàn)出減小和增加的趨勢(shì),能夠有效地表征出繼電器的壽命趨勢(shì)[3]。
繼電器的超程,一般是指繼電器從動(dòng)觸點(diǎn)與靜觸點(diǎn)接觸瞬間起到銜鐵閉合為止,觸點(diǎn)的移動(dòng)距離。超程時(shí)間就是指繼電器觸點(diǎn)在超程階段移動(dòng)所需的時(shí)間,吸合時(shí)間是指繼電器線圈加電到動(dòng)觸點(diǎn)第一次碰撞靜觸點(diǎn)所需的時(shí)間。吸合時(shí)間和超程時(shí)間均可以通過繼電器線圈電流和觸點(diǎn)電壓動(dòng)態(tài)測(cè)試波形直觀地表示出來。圖1(a)和(b)分別為繼電器線圈加電及觸點(diǎn)吸合瞬間的動(dòng)態(tài)波形示意圖和利用數(shù)字示波器采集的被測(cè)繼電器動(dòng)態(tài)測(cè)試波形圖,超程時(shí)間tc=t2-t1,吸合時(shí)間tx=t1。
3 特征參數(shù)采集裝置的設(shè)計(jì)
3.1 特征參數(shù)采集裝置設(shè)計(jì)
本文設(shè)計(jì)了一套試驗(yàn)室特征參數(shù)采集裝置,該試驗(yàn)裝置能夠模擬實(shí)際負(fù)載加載瞬間的電流沖擊,并以額定電壓采用單步控制或連續(xù)周期控制的方式激勵(lì)被測(cè)繼電器控制輸出,在繼電器導(dǎo)通瞬間同步加載負(fù)載。特征參數(shù)采集裝置連續(xù)自動(dòng)采集導(dǎo)彈供電控制組合中繼電器每次吸合瞬間至供電穩(wěn)定過程的繼電器電磁線圈電壓/電流、繼電器觸點(diǎn)電壓/電流、繼電器吸合時(shí)間和超程時(shí)間等特征參數(shù),以繼電器全壽命周期的動(dòng)作次數(shù)作為索引保存各類特征參數(shù)的變化情況。
采集裝置原理圖如圖2所示。
采集裝置的控制功能包括兩部分,分別為繼電器通斷控制和電子負(fù)載的控制。為了模擬實(shí)際負(fù)載系統(tǒng)沖擊電流的發(fā)生時(shí)間,控制測(cè)試組合采用外部觸發(fā)方式,觸發(fā)可編程直流負(fù)載在繼電器吸合瞬間同步輸出預(yù)置的電流波形。繼電器與電子負(fù)載的同步控制如圖3所示,以第一個(gè)動(dòng)作周期為例說明,當(dāng)繼電器線圈得電經(jīng)過t0后,在繼電器觸點(diǎn)吸合導(dǎo)通的同時(shí)負(fù)載輸出峰值電流ia;在t1時(shí)刻輸出穩(wěn)態(tài)電流ib,在t2時(shí)刻輸出穩(wěn)態(tài)電流ic,t3時(shí)刻繼電器關(guān)斷后負(fù)載電流為零。
3.2 負(fù)載特性數(shù)據(jù)
試驗(yàn)以導(dǎo)彈供電控制組合中使用的典型繼電器作為被測(cè)繼電器,以實(shí)際使用過程記錄的導(dǎo)彈供電控制組合加載時(shí)電壓、電流曲線數(shù)據(jù)作為負(fù)載特特性。選取一種繼電器樣品和一種典型負(fù)載特性進(jìn)行加載試驗(yàn),典型負(fù)載特性見表2。
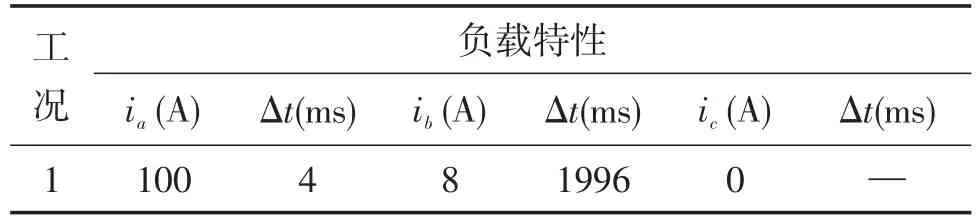
表2 負(fù)載特性
4 故障預(yù)測(cè)數(shù)學(xué)模型的建立
由試驗(yàn)測(cè)試數(shù)據(jù)可知,隨著動(dòng)作次數(shù)的增加,吸合時(shí)間呈逐漸增大的趨勢(shì),超程時(shí)間呈逐漸減小的趨勢(shì),兩種數(shù)據(jù)都具有一定分散性。針對(duì)這兩種特征參數(shù),可采用時(shí)間序列分析方法[4]建立壽命預(yù)測(cè)數(shù)學(xué)模型。
繼電器的壽命預(yù)測(cè)是非平穩(wěn)時(shí)間序列預(yù)測(cè)問題,可將繼電器動(dòng)作N次所采集的特性參數(shù)Xt,Xt-1,Xt-2,…,Xt-N+1記為一個(gè)非平穩(wěn)隨機(jī)過程。根據(jù)Cramer分解定理,該非平穩(wěn)隨機(jī)過程的預(yù)測(cè)數(shù)學(xué)模型可表示為
式中:Yt——Xt中的趨勢(shì)項(xiàng)時(shí)間序列分量;Zt——Xt中的平穩(wěn)項(xiàng)時(shí)間序列分量。
因此,繼電器壽命預(yù)測(cè)數(shù)學(xué)模型包括兩部分:趨勢(shì)項(xiàng)時(shí)間序列預(yù)測(cè)數(shù)學(xué)模型和平穩(wěn)項(xiàng)時(shí)間序列預(yù)測(cè)數(shù)學(xué)模型。
4.1 趨勢(shì)項(xiàng)時(shí)間序列預(yù)測(cè)數(shù)學(xué)模型
趨勢(shì)項(xiàng)時(shí)間序列預(yù)測(cè)數(shù)學(xué)模型是研究隨動(dòng)作次數(shù)變化的確定性函數(shù)的數(shù)學(xué)模型,由繼電器的某些特性參數(shù)的磨損失效因素決定。對(duì)繼電器某特性參數(shù)的測(cè)試數(shù)據(jù)X1,X2,…,XN,可采用相對(duì)的時(shí)間單位表示,即取
則,趨勢(shì)項(xiàng)時(shí)間序列預(yù)測(cè)數(shù)學(xué)模型的一般描述為:
式中:a,b,Cj(j=1,2,…11)——待定參數(shù)。
4.2 平穩(wěn)項(xiàng)時(shí)間序列預(yù)測(cè)數(shù)學(xué)模型
平穩(wěn)項(xiàng)時(shí)間序列預(yù)測(cè)數(shù)學(xué)模型是應(yīng)用數(shù)理統(tǒng)計(jì)與模型辨識(shí)理論建立的繼電器特性參數(shù)隨機(jī)變化的數(shù)學(xué)模型,由繼電器特性參數(shù)的分散性決定。通過觀察圖4所示特征參數(shù)的自相關(guān)系數(shù)(ACF)和偏自相關(guān)系數(shù)(PACF)可知,樣本自相關(guān)函數(shù)呈拖尾狀,偏自相關(guān)系數(shù)呈p階截尾狀,因此判定時(shí)間序列為AR(p)模型。
設(shè)繼電器動(dòng)作N次采集某特征參數(shù)的平穩(wěn)項(xiàng)時(shí)間序列向量為{}zt,t=1,2,…,N,則可利用平穩(wěn)時(shí)間序列的p階自回歸模型表示zt的預(yù)測(cè)數(shù)學(xué)模型為
5 預(yù)測(cè)數(shù)學(xué)模型的辨識(shí)
5.1 趨勢(shì)項(xiàng)時(shí)間序列數(shù)學(xué)模型的辨識(shí)
根據(jù)部分壽命周期的趨勢(shì)項(xiàng)采集數(shù)據(jù),建立趨勢(shì)項(xiàng)回歸模型。以吸合時(shí)間為例,根據(jù)前6000次動(dòng)作的吸合時(shí)間,將每10次動(dòng)作數(shù)據(jù)取平均后得到600點(diǎn)的吸合時(shí)間。對(duì)式(3)所描述的數(shù)學(xué)模型,采用線性回歸模型、多項(xiàng)式回歸模型、指數(shù)回歸模型、冪回歸模型四種常用的函數(shù)進(jìn)行回歸分析,建立并辨識(shí)出相應(yīng)的回歸模型。
四種時(shí)間序列回歸曲線如圖5所示。
計(jì)算上述四種回歸數(shù)學(xué)模型的回歸標(biāo)準(zhǔn)偏差見表3。比較各種回歸數(shù)學(xué)模型的回歸標(biāo)準(zhǔn)偏差,取回歸標(biāo)準(zhǔn)偏差最小者所對(duì)應(yīng)的數(shù)學(xué)模型作為趨勢(shì)項(xiàng)壽命預(yù)測(cè)數(shù)學(xué)模型,因此采用指數(shù)回歸模型為繼電器趨勢(shì)項(xiàng)壽命預(yù)測(cè)數(shù)學(xué)模型。
同理可得,以超程時(shí)間為變量的趨勢(shì)項(xiàng)時(shí)間序列預(yù)測(cè)數(shù)學(xué)模型
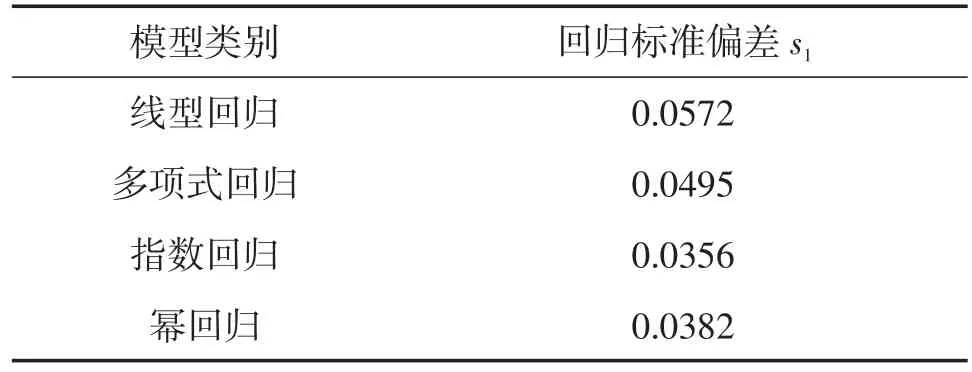
表3 四種回歸模型偏差統(tǒng)計(jì)
5.2 平穩(wěn)項(xiàng)時(shí)間序列數(shù)學(xué)模型的辨識(shí)
首先針對(duì)AR(p)模型根據(jù)AIC或FPE定階準(zhǔn)則為函數(shù)定階。根據(jù)FPE、AIC定階準(zhǔn)則,可以得到特征參數(shù)相應(yīng)的兩種準(zhǔn)則函數(shù)曲線,如圖6所示。從圖中可知,隨著模型階次升高,總體趨勢(shì)是下降的。在n較小時(shí),下降很快,隨著n的增加,下降趨勢(shì)變慢;不論用哪種準(zhǔn)則進(jìn)行檢驗(yàn),都是在n=8時(shí)模型最為合適,因此模型階數(shù)p定為8。
由于最小二乘估計(jì)充分應(yīng)用了每一個(gè)觀察值所提供的信息,因此估計(jì)精度高。本文采用最小二乘法對(duì)AR模型進(jìn)行參數(shù)估計(jì),方程組可表示為
寫成矩陣形式為
利用Matlab軟件System identification toolbox中的AR()函數(shù)及最小二乘法分別求得兩種特征參數(shù)壽命預(yù)測(cè)平穩(wěn)項(xiàng)時(shí)間序列自回歸模型。
以吸合時(shí)間為變量的預(yù)測(cè)平穩(wěn)項(xiàng)模型
以超程時(shí)間為變量的預(yù)測(cè)平穩(wěn)項(xiàng)模型
對(duì)吸合時(shí)間AR(8)模型的前5499個(gè)平穩(wěn)項(xiàng)時(shí)間序列預(yù)測(cè)分析曲線如圖7(a)所示,平穩(wěn)項(xiàng)時(shí)間序列預(yù)測(cè)曲線與實(shí)測(cè)曲線吻合度較高,預(yù)測(cè)值誤差不超過3%。對(duì)超程時(shí)間AR(7)模型的前1399個(gè)平穩(wěn)項(xiàng)時(shí)間序列預(yù)測(cè)分析曲線如圖7(b)所示,平穩(wěn)項(xiàng)時(shí)間序列預(yù)測(cè)曲線與實(shí)測(cè)曲線吻合度較q高。由于受典型負(fù)載工況的電流脈沖幅值影響,電磁線圈電流波動(dòng)較大,導(dǎo)致超程時(shí)間平穩(wěn)項(xiàng)比吸合時(shí)間平穩(wěn)項(xiàng)波動(dòng)大,但預(yù)測(cè)值誤差不超過10%。
6 試驗(yàn)結(jié)果分析
根據(jù)式(7)、(9)、(12)和式(13)得到,基于吸合時(shí)間特征參數(shù)的壽命預(yù)測(cè)數(shù)學(xué)模型為
基于超程時(shí)間特征參數(shù)的壽命預(yù)測(cè)數(shù)學(xué)模型為
在典型負(fù)載模擬工況下,通過實(shí)驗(yàn)研究給出吸合時(shí)間和超程時(shí)間的失效判別準(zhǔn)則,供電控制組合繼電器的特征值極限參數(shù)分別為tcmin=0.3ms,txmax=15.8ms。采用預(yù)測(cè)數(shù)學(xué)模型對(duì)繼電器壽命的預(yù)測(cè)結(jié)果見表4,試驗(yàn)結(jié)果繼電器的壽命達(dá)到19.2萬次,基于吸合時(shí)間的壽命預(yù)測(cè)結(jié)果為17.68萬次,基于超程時(shí)間的壽命預(yù)測(cè)結(jié)果為17.26萬次,計(jì)算結(jié)果與試驗(yàn)結(jié)果的相對(duì)誤差分別為7.8%、10.1%。可知以吸合時(shí)間和超程時(shí)間為特征參數(shù)的壽命預(yù)測(cè)方法均是有效的,吸合時(shí)間的相對(duì)誤差略小,說明以吸合時(shí)間為特征參數(shù)的壽命預(yù)測(cè)方法有效性相對(duì)較好一些。

表4 故障預(yù)測(cè)結(jié)果
7 結(jié)束語
本文以導(dǎo)彈供電控制組合為研究對(duì)象,根據(jù)裝備組成及特點(diǎn)對(duì)其故障模式進(jìn)行分析,選定繼電器作為故障預(yù)測(cè)對(duì)象,基于吸合時(shí)間和超程時(shí)間兩個(gè)表征供電控制組合繼電器接觸性能退化的特征參數(shù),采用時(shí)間序列分析方法建立故障預(yù)測(cè)數(shù)學(xué)模型。設(shè)計(jì)了一套實(shí)驗(yàn)室特征參數(shù)采集裝置進(jìn)行典型工況加載模擬及參數(shù)采集,利用采集的特征參數(shù)辨識(shí)預(yù)測(cè)模型,并完成被試?yán)^電器樣品的壽命試驗(yàn),試驗(yàn)結(jié)果驗(yàn)證了預(yù)測(cè)結(jié)果的正確性。該方法為導(dǎo)彈供電控制組合的故障預(yù)測(cè)和健康管理提供了一種思路。
[1]Rieder W F.,Strof T.W.Relay Life Tests With Contact Resistance Measurement After Each Operation[J].IEEE Transactions on Components,Hybrids,and Manufacturing Technology,1991,14(1):109~112.
[2]魏梅芳,李震彪,宋曉亮等.開關(guān)觸頭電壽命預(yù)測(cè)方法分析[J].低壓電器,2006(1):11~14.
[3]翟國富,王淑娟,許峰等.基于超程時(shí)間和吸合時(shí)間建模的繼電器雙變量壽命預(yù)測(cè)方法的研究[J].中國電機(jī)工程學(xué)報(bào),2002,22(7):76~80.
[4]肖枝洪.時(shí)間序列分析與SAS應(yīng)用(第二版)[M].武漢大學(xué)出版社,2012.
Research on Fault Forecasting Method of Missile Power Supply Control Unit
HUO Xiao-yun1YANG Li-feng2ZHONG Heng1
(1.Beijing Mechanical Equipment Institute,Beijing,100039;2.Air-ship Missile Military Representative Office of Navy in Beijing,Beijing,100039,China)
TP206.3
A
10.12060/j.issn.1000-7202.2017.03.10
2016-11-14,
2017-04-10
霍曉云,(1981.11-)女,高級(jí)工程師,主要研究方向:發(fā)射系統(tǒng)自動(dòng)測(cè)試技術(shù)。
1000-7202(2017)03-0044-07
猜你喜歡
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(hào)(2016年4期)2016-06-01 12:10:19
電測(cè)與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車維修與保養(yǎng)(2015年8期)2015-04-17 03:32:52
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維修與保養(yǎng)(2015年7期)2015-04-17 02:12:40
汽車維修與保養(yǎng)(2015年2期)2015-04-17 01:30:34
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
