基于Matlab的汽車ABS系統(tǒng)設(shè)計(jì)
2017-08-07 06:20:08李孟
艦船電子工程 2017年7期
李孟
(南陽理工學(xué)院南陽473000)
基于Matlab的汽車ABS系統(tǒng)設(shè)計(jì)
李孟
(南陽理工學(xué)院南陽473000)
介紹了一種基于Matlab中的Simulink工具箱對(duì)汽車的ABS防抱死系統(tǒng)進(jìn)行建模的方法,首先由汽車ABS系統(tǒng)的制動(dòng)原理對(duì)參與制動(dòng)過程的各部件進(jìn)行建模實(shí)現(xiàn),主要模塊包括如車輪模型、輪胎模型與邏輯門限控制模塊等。根據(jù)實(shí)際情況設(shè)置所建模型的具體參數(shù)和進(jìn)行仿真實(shí)驗(yàn)的參數(shù),最后分別以相同的30m/s的初速在三種不同附著系數(shù)的路面上對(duì)其進(jìn)行仿真驗(yàn)證,主要針對(duì)制動(dòng)距離、制動(dòng)時(shí)間及車速與輪速這幾個(gè)對(duì)制動(dòng)效果起決定作用的量進(jìn)行研究,通過對(duì)仿真曲線的對(duì)比分析,證明該系統(tǒng)在不同的路面情況下都能夠達(dá)到良好的制動(dòng)效果。
Matlab;ABS防抱死系統(tǒng);邏輯控制
Class NumberTP311
1 引言
隨著電子技術(shù)的發(fā)展,在汽車的研發(fā)和生產(chǎn)中對(duì)電子設(shè)備的要求也越來越高,為滿足汽車行業(yè)研發(fā)與設(shè)計(jì)的需要,越來越多的汽車工業(yè)技術(shù)中用到了建模仿真技術(shù)。作為Matlab中重要的功能組件Simulink,免去了用戶自己編寫代碼的繁瑣,能夠?qū)崿F(xiàn)對(duì)動(dòng)態(tài)系統(tǒng)的建模與仿真[1],在此工具箱的編譯環(huán)境中,可以使用簡單的直觀的工具箱添加功能來實(shí)現(xiàn)復(fù)雜的仿真,在控制理論與數(shù)字信號(hào)處理過程中的復(fù)雜仿真與設(shè)計(jì)都能夠使用。本文介紹了應(yīng)用Matlab中的Simulink工具箱進(jìn)行建模仿真的系統(tǒng),其主要功能是對(duì)ABS防抱死系統(tǒng)進(jìn)行仿真驗(yàn)證[2],驗(yàn)證其控制策略與算法的可靠性。用于輔助和改進(jìn)汽車ABS防抱死系統(tǒng)的設(shè)計(jì),減少實(shí)車試驗(yàn)的工作量,提高工作效率。
2 ABS系統(tǒng)建模設(shè)計(jì)思路
使用Simulink工具箱進(jìn)行建模仿真時(shí),一般要分為兩步來進(jìn)行,首先要對(duì)仿真模型進(jìn)行搭建,其次是對(duì)仿真過程中的參數(shù)進(jìn)行設(shè)置,設(shè)置的參數(shù)要符合實(shí)際應(yīng)用的要求,能夠真實(shí)反映模型在實(shí)際中的具體應(yīng)用。完成之后就可模擬所建模型在設(shè)置參數(shù)下的具體行為,從而對(duì)系統(tǒng)的性能來進(jìn)行評(píng)估與改進(jìn)。
在本系統(tǒng)中,根據(jù)汽車制動(dòng)過程的工作原理,要分別對(duì)輪胎、液壓制動(dòng)系統(tǒng)、制動(dòng)器等部位進(jìn)行建模實(shí)現(xiàn);考慮到汽車在制動(dòng)過程中是否啟動(dòng)ABS防抱死制動(dòng)由邏輯門限控制模塊決定,而邏輯門限模塊又與車輪滑移率和路面附著系數(shù)等參數(shù)密切相關(guān),相應(yīng)要建立對(duì)應(yīng)參數(shù)模型;結(jié)合汽車正常行駛過程中受到的空氣阻力與運(yùn)動(dòng)阻力,建立汽車動(dòng)力學(xué)模型。
如圖1所示為在MATLAB中使用Simulink工具箱搭建的ABS防抱死系統(tǒng)模型。
仿真模型建立后,根據(jù)實(shí)際情況對(duì)模型進(jìn)行參數(shù)設(shè)置,由于本系統(tǒng)所建模型是參照家用小型轎車,仿真模型中的參數(shù)可參照家用小型轎車的參數(shù)值。
在仿真模型中的參數(shù)設(shè)定如表1所示。
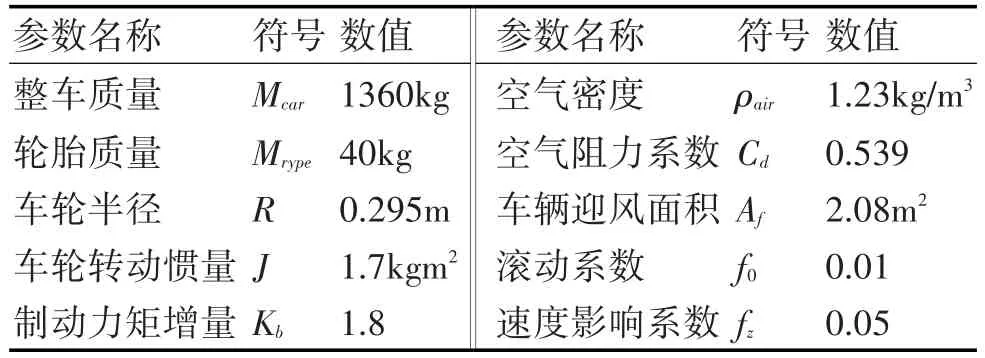
表1 仿真模型中參數(shù)設(shè)定
3 主要模塊介紹
3.1 車輪模型
在仿真建模的過程中,為了簡化模型,只考慮車輛在做縱向直線運(yùn)動(dòng)時(shí)的動(dòng)態(tài)過程制動(dòng)情況,對(duì)其橫擺與側(cè)向運(yùn)動(dòng)情況不做考慮[4]。
水平運(yùn)動(dòng)方程為
車輪轉(zhuǎn)動(dòng)運(yùn)動(dòng)方程:
車輪縱向摩擦力:
垂直方向平衡方程:
滑移率:
式中,M為1 4車輛總質(zhì)量(kg),F(xiàn)x為地面制動(dòng)力(N),J為車輪轉(zhuǎn)動(dòng)慣量(kg/m2),R為車輪半徑(m),Tb為制動(dòng)力矩(Nm),μ為地面附著系數(shù),F(xiàn)z為法向壓力(N),v為車身速度(m/s),vw為車輪輪速,S為滑移率。
式中c1、c2和c3為待定系數(shù)。
由式(6)可得最佳滑移率與最大附著系數(shù)為
3.2 輪胎模型
輪胎的縱向附著系數(shù)μ與滑移率S之間的函數(shù)關(guān)系為
μg是滑移率為100%時(shí)的附著系數(shù),路面狀況不同,參數(shù)c1、c2、c3和Sk、μmax、μg值不相同,典型路面參考值如表2所示。
由于汽車制動(dòng)過程中,其縱向附著系數(shù)和滑移率之間并不是簡單的線性關(guān)系,為了使建模更加符合實(shí)際制動(dòng)過程中的情況,在這里采用雙線性模型來對(duì)制動(dòng)過程中的輪胎模型進(jìn)行簡化處理,可得如式(9)所示
3.3 邏輯門限控制模塊
車輛的制動(dòng)過程中,為達(dá)到最佳制動(dòng)效果一般將滑移率控制在最佳滑移率附近一段小區(qū)間。若超出此區(qū)間,將相應(yīng)指令發(fā)送給中央處理單元,對(duì)制動(dòng)進(jìn)行調(diào)整。在本系統(tǒng)采用將車輪加速度與滑移率兩個(gè)門限值相結(jié)合的制動(dòng)策略,在制動(dòng)過程中需要計(jì)算出此時(shí)的車輪加速度,結(jié)合同時(shí)刻的滑移率,選擇合適制動(dòng)模式。本系統(tǒng)的邏輯門限控制模塊如圖4所示。
4 仿真結(jié)果分析
在對(duì)ABS防抱死系統(tǒng)的各個(gè)子模塊進(jìn)行Simulink仿真系統(tǒng)建模后,按照實(shí)際制動(dòng)過程設(shè)置參數(shù)來進(jìn)行仿真實(shí)現(xiàn)[8]。設(shè)置車輛的制動(dòng)過程初始階段的速度為30m/s,由于制動(dòng)過程中對(duì)前輪與后輪的制動(dòng)效果不同,需要對(duì)主動(dòng)輪與從動(dòng)輪設(shè)置不同的邏輯門限值。為了能夠分析在不同的路面情況下本系統(tǒng)都具有較為良好的制動(dòng)效果,分別設(shè)置不同的附著系數(shù)路面為例,以制動(dòng)距離、車速和輪速為評(píng)價(jià)標(biāo)準(zhǔn)來進(jìn)行研究。具體參數(shù)設(shè)置如表3所示。

表3 控制參數(shù)
1)在高附著系數(shù)(μ=0.95)的路面上
高附著系數(shù)路面上在制動(dòng)距離仿真曲線如圖5所示。初速為30m/s的情況下,汽車的制動(dòng)距離約為42m,與之對(duì)應(yīng)的制動(dòng)時(shí)間約為3.1s。
2)在中附著系數(shù)(μ=0.55)的路面上
中附著系數(shù)路面上在制動(dòng)距離仿真曲線如圖7所示。初速為30m/s的情況下,汽車的制動(dòng)距離約為52m,與之對(duì)應(yīng)的制動(dòng)時(shí)間約為4.7s。
3)低附著系數(shù)(μ=0.16)的路面上
低附著系數(shù)路面上在制動(dòng)距離仿真曲線如圖9所示。初速為30m/s的情況下,汽車的制動(dòng)距離約為87m,與之對(duì)應(yīng)的制動(dòng)時(shí)間約為8.8s。
不同附著系數(shù)路面上的制動(dòng)距離與制動(dòng)時(shí)間仿真曲線圖,車速與輪速仿真曲線對(duì)比,可得本系統(tǒng)在不同路面情況的制動(dòng)距離和制動(dòng)時(shí)間,滿足系統(tǒng)的制動(dòng)要求,得到合適的制動(dòng)控制效果[10]。本系統(tǒng)在建模過程中利用子模塊的功能實(shí)現(xiàn)對(duì)車速變化曲線與輪速變化曲線,得其在不同制動(dòng)情況下的吻合效果都較為良好,也能夠證明在本系統(tǒng)中使用的輪速與車速算法的實(shí)用性與準(zhǔn)確性。
5 結(jié)語
本文采用Matlab的Simulink工具箱對(duì)ABS防抱死系統(tǒng)進(jìn)行建模,介紹單輪子模塊、輪胎子模塊及邏輯門限控制子模塊,對(duì)仿真模型中的參數(shù)進(jìn)行設(shè)置,最后進(jìn)行實(shí)驗(yàn)驗(yàn)證,設(shè)置不同的附著系數(shù)以相同的制動(dòng)初速度進(jìn)行仿真驗(yàn)證,對(duì)制動(dòng)過程中的制動(dòng)距離、制動(dòng)時(shí)間的仿真曲線分析,證明本系統(tǒng)對(duì)不同附著率的路面均能實(shí)現(xiàn)較好的制動(dòng)性能,對(duì)車速與輪速的變化曲線進(jìn)行對(duì)比,得出其在不同制動(dòng)情況下的吻合效果都較良好。
[1]周景潤,張麗娜,基于MATLAB與fuzzyTECH的模糊與神經(jīng)網(wǎng)絡(luò)設(shè)計(jì)[M].北京:電子工業(yè)出版社,2010:47-93.
[2]Jeon Y S,Mok H S,Choe G H,et al.A New Simulation Model of BLDC Motor with Real Back EMF Waveform[J]. Poceeding form Computers in Power Electronics,2011,18(2):17-20.
[3]Cheng Jun,Vehicle Control System Design by Use of MATLAB/SIMULINK[J].Automotive Research and Development,2009(3):7-10.
[4]李彬等.模糊邏輯控制的改進(jìn)與仿真[J].機(jī)械工程與自動(dòng)化,2012(4):23-25.
[5]雷敬川.對(duì)汽車ABS系統(tǒng)的淺析[J].科技信息,2014(7):35-40.
[6]張集樂.ABS輪速傳感器及其信號(hào)處理[J].機(jī)械與電子,2013(12):12-15.
[7]丁守福.基于Matlab計(jì)算機(jī)仿真在液壓系統(tǒng)中的應(yīng)用[J].煤礦機(jī)械,2014(9):46-51.
[8]張亮,郭仕劍,王寶順.MATLAB7.X系統(tǒng)建模與仿真[M].人民郵電出版社,2006:8-12.
[9]王琦,徐式藴,趙睿濤.MATLAB基礎(chǔ)與應(yīng)用實(shí)例集粹[M].北京:人民郵電出版社,2007:99-102.
[10]張集樂.ABS輪速傳感器及其信號(hào)處理[J].機(jī)械與電子,2014(12):12-15.
[11]齊志權(quán),劉昭度,馬岳峰,崔海峰.汽車防抱系統(tǒng)參考車速確定方法[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2014(9):27-29.
Design of Anti-lock Braking System of Automobile Based on Matlab
LI Meng
(Nanyang Insitute of Technology,Nanyang473000)
This dissertation introduces a method based on Matlab Simulink in the car ABS anti-lock system,which describes the main modules,such as a wheel model,the tire model with the logic threshold control module.And then specific model parameters and simulation parameters are set to built the module,and finally in the 30m/s velocity were carried out on the simulation in the different road,According to analisis the braking distance,braking time and the speed of the wheel,proves that the system for a variety of road has relatively good braking effect.
Matlab,ABS anti-lock braking system,logic control
TP311
10.3969/j.issn.1672-9730.2017.07.021
2017年1月17日,
2017年2月20日
李孟,男,碩士研究生,講師,研究方向:電子信息信號(hào)處理。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
兒童時(shí)代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(jí)(2016年4期)2016-04-18 00:24:37
