履帶-負載輪-地面耦合作用關系研究
2017-08-07 05:50:41馮莉鄧兆軍馬巖楊春梅宋文龍郭璨許洪剛
林業(yè)工程學報 2017年4期
馮莉,鄧兆軍,馬巖,楊春梅,宋文龍,郭璨,許洪剛
(東北林業(yè)大學林業(yè)與木工機械工程技術中心,哈爾濱150040)
履帶-負載輪-地面耦合作用關系研究
馮莉,鄧兆軍,馬巖,楊春梅,宋文龍,郭璨,許洪剛
(東北林業(yè)大學林業(yè)與木工機械工程技術中心,哈爾濱150040)
為了解決履帶行走機構對于履帶選型、安裝及整個機構的動力問題,分析了各個狀態(tài)下履帶與負載輪、履帶與地面的相互作用關系,當三者都相互作用時,受力狀況是最復雜的。在履帶與負載輪的相互作用下,分析了履帶與負載輪之間的摩擦力,給出了履帶作用在負載輪上的力和力矩的計算方法,推導出了履帶各段張緊力的計算公式,為履帶的選型、安裝及調試提供了理論依據。在履帶和地面的相互作用下,建立履帶車輛下陷數(shù)學模型,推導出了下陷量、驅動力及行駛阻力的計算公式,為履帶車輛動力學計算及履帶車輛行走機構的設計提供了理論依據,有利于縮短履帶行走機構的設計周期。運用Adams對履帶張緊力、行駛阻力、下陷深度、行駛驅動力仿真,仿真數(shù)據與理論數(shù)據數(shù)值誤差在20%以內,驗證理論公式的合理性。
摩擦力;張緊力;驅動力;行駛阻力;仿真
由于履帶式車輛對惡劣行駛環(huán)境的適應性強,所以其在林業(yè)機械領域使用極為廣泛[1],因此對履帶進行結構設計是非常必要的。但在履帶的結構設計中缺乏動力設計參數(shù)及運動設計參數(shù)的理論依據,更多是依靠經驗,嚴重影響了機構工作的可靠性及結構的最優(yōu)性。在履帶機構安裝及調試過程中缺乏力學理論依據,僅憑借經驗及實際操作情況進行調整,大大延長了調試周期,增加了設計成本,消耗大量人力、物力,所以創(chuàng)建行之有效的解決方法是十分必要的。
1 履帶模型構建
履帶車輛的行走機構由1個主動輪、2個誘導輪、2個負載輪及橡膠履帶組成(圖1)。履帶可簡化為沒有變形的柔性帶,將主動輪、誘導輪、負載輪包圍構成履帶傳動機構。履帶模型通過描述履帶與負載輪、誘導輪的傳動方式,體現(xiàn)出各個輪之間的作用關系及整個機構與地面的相互作用關系。
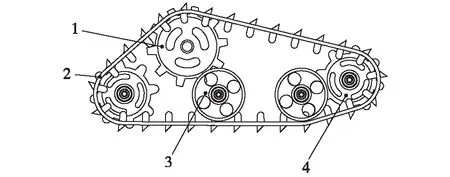
1.主動輪; 2. 履帶 ;3.負載輪; 4. 誘導輪圖1 履帶行走機構簡圖Fig. 1 The schematic diagram of crawler travel mechanism
2 履帶-負載輪-地面的相對位置關系
履帶車輛與地面的相互作用是由地面產生的激勵,通過履帶與負載輪、主動輪和誘導輪的作用傳遞到林業(yè)機械車體,所以履帶的受力狀況及運動狀態(tài)對林業(yè)機械車輛的機動性有重要影響。從履帶、負載輪、地面三者的空間位置可分為4種情況。
1)履帶、負載輪、地面三者互不接觸如圖2,此時負載輪不受承載力。
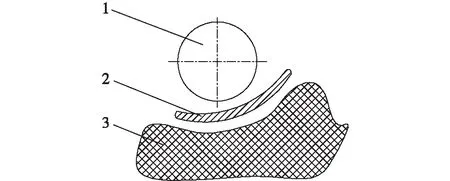
1.負載輪; 2. 履帶; 3.地面圖2 負載輪、履帶和地面互不接觸Fig. 2 Load wheel, track, and ground without touch by each other
2)履帶與負載輪之間有相互作用,負載輪所受力為履帶張緊力。負載輪、履帶點接觸,與地面互不接觸,如圖3a;負載輪、履帶線接觸,與地面不接觸,如圖3b。
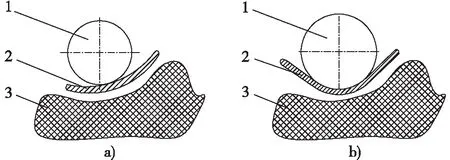
1. 負載輪; 2. 履帶; 3. 地面圖3 負載輪、履帶接觸,履帶與地面不接觸Fig. 3 The track in contact with load wheel but not with ground
3)負載輪、履帶不接觸,履帶與地面接觸,負載輪不受力。負載輪、履帶互不接觸,履帶與地面點接觸圖4a;負載輪、履帶互不接觸,履帶與地面線接觸圖4b。

1. 負載輪; 2. 履帶; 3. 地面圖4 負載輪、履帶互不接觸,履帶與地面接觸Fig. 4 The track in contact with ground but not with load wheel
4)負載輪、履帶、地面互相接觸,負載輪受力。負載輪與履帶線接觸,履帶與地面點接觸如圖5a;負載輪、履帶、地面線接觸如圖5b;負載輪、履帶、地面點接觸如圖5c;負載輪、履帶點接觸,履帶與地面線接觸如圖5d。

1.負載輪; 2. 履帶; 3. 地面圖5 負載輪、履帶、地面互相接觸Fig. 5 The contact between load wheel, track and ground
可見三者都相互作用時,三者之間的受力狀況是最復雜的,地面作用到履帶上的壓力、剪切力、摩擦力通過履帶進一步傳遞給負載輪、主動輪、誘導輪,最終作用在車體上[2-3]。
3 履帶與負載輪的相互作用
3.1 履帶與負載輪之間的摩擦力
履帶與負載輪之間的摩擦力出現(xiàn)在履帶、負載輪接觸與地面不接觸,以及履帶、負載輪、地面都接觸這兩種狀態(tài)。履帶和負載輪之間的摩擦力很大程度上影響著動力的傳遞及車輛行駛的穩(wěn)定性,所以對摩擦力的計算是非常重要的[4]。
履帶與負載輪之間第i個接觸點的摩擦力可用下式表示:
(1)

當摩擦力與相對速度方向相同時,即a>0時,sig(a)=+1;當摩擦力與相對速度方向相反時,即a<0時,sig(a)=-1[3]。
3.2 履帶作用在負載輪上的力和力矩
第i個負載輪上的力矩是由摩擦力以轉矩的形式傳遞到負載輪上,即摩擦力矩:
(2)

履帶作用在第i個負載輪上的力,為該負載輪所被包絡履帶張緊力的矢量和如圖6所示,則該作用力可表示為:
(3)


圖6 履帶-地面-負載輪受力分析Fig. 6 Analysis of force of track-ground-load wheel
3.3 履帶張緊力
履帶車輛在復雜路面工作時,復雜路面產生的激勵首先與履帶相互作用,所以履帶的結構及性能對整機的工作有極大影響。履帶張緊力直接影響著履帶的結構設計及履帶行走機構的調試,所以對履帶張緊力的研究是十分重要的。
履帶車輛在勻速行駛及非勻速行駛狀態(tài)下,履
帶與主動輪、負載輪、誘導輪的受力狀態(tài)不同,所以各段履帶張緊力是不同的[5-7]。圖7為各段履帶張緊力分布狀況。
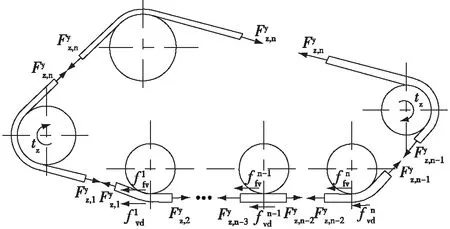
注為勻速行駛狀態(tài)時履帶和地面間的摩擦力;為履帶與負載輪間第i個接觸點的摩擦力;tz為主動輪驅動扭矩。圖7 履帶受力的分布Fig. 7 Force distribution on track
在勻速行駛狀態(tài)下,第i段履帶張緊力值可表示為:
(4)

已知勻速行駛為非勻速行駛的初始狀態(tài),由理論力學可得關系式:
(5)
(6)

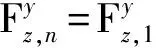
整個履帶的各段履帶張緊力值可通過如下矩陣表示:
(7)

4 履帶與地面的相互作用
由于履帶車自身負載會對地面產生力的作用,因此履帶會在地面產生下陷現(xiàn)象,由于地面的下陷,履帶會被路面土壤包絡產生行駛阻力,阻礙履帶車的行駛。因此履帶車輛的下陷量、履帶車的行駛阻力和履帶驅動力是評價和預估履帶車輛行駛能力的關鍵因素,也是履帶行走機構設計的主要動力影響因素[8-9]。
4.1 履帶車輛下陷量計算
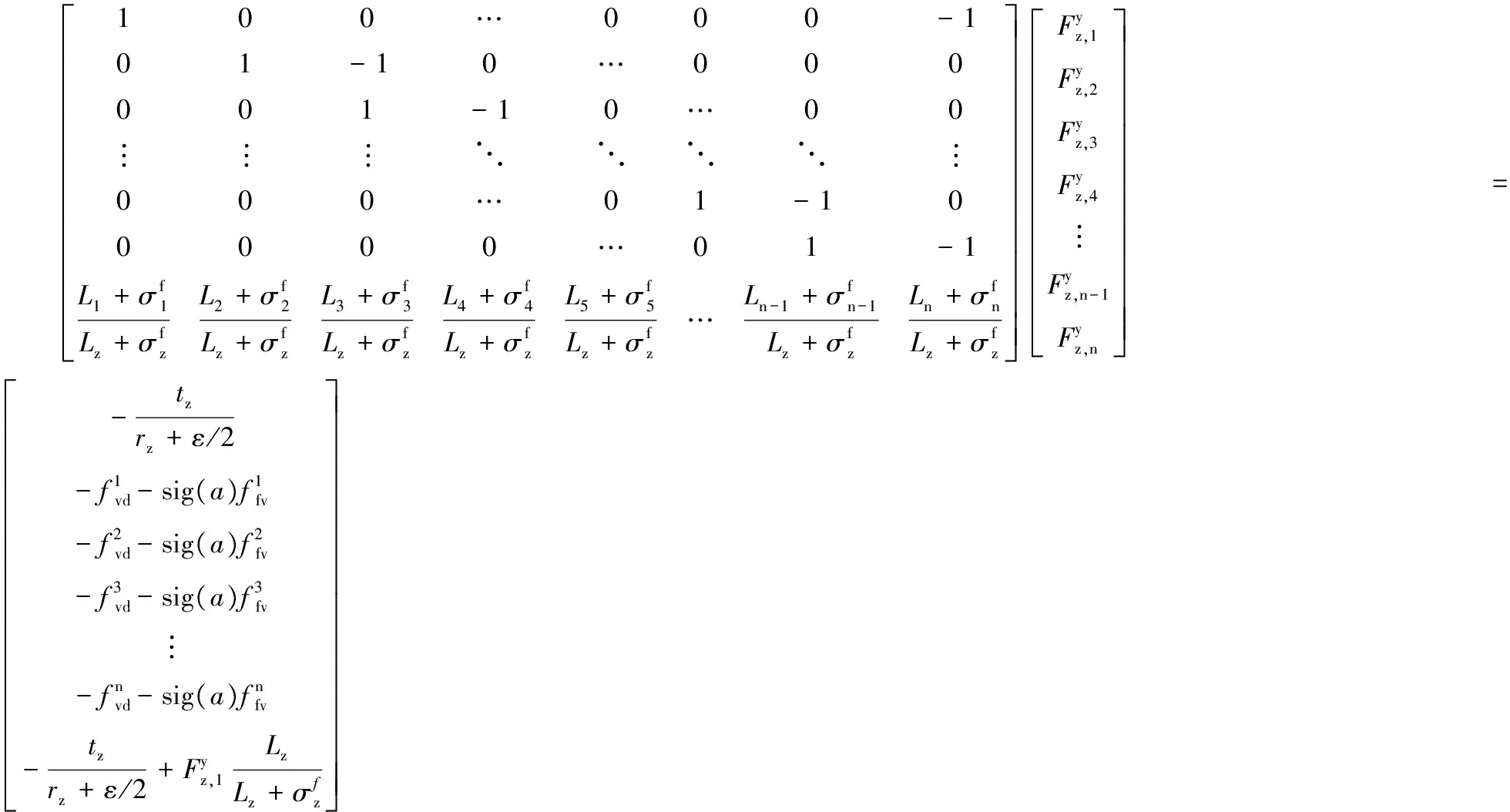
履帶車輛正常行駛情況下,地面土壤包絡負載輪及履帶的深度不會超過負載輪半徑與履帶厚度之和。將包絡負載輪的履帶均分成m份,每份的長度為σ,該段履帶每個點的下陷量如圖8所示并建立坐標系[10],第g個點的下陷量Xg表示為:
(8)
式中:rf為負載輪半徑,m;g為履帶上的第g個點;m為將履帶分為m份;σ為1/m份履帶長度,m;ε為履帶厚度,m;Yg為履帶上的第g個點的縱坐標值,m。
g為履帶上的第g個點;m為將履帶分為m份;σ為1/m份履帶長度,m;Xg為第g個點的下陷量,m;Yg為履帶上的第g個點的縱坐標值,m。圖8 負載輪-履帶-地面下陷量幾何關系Fig. 8 Geometric relationship of load wheel-crawler-ground subsidence
4.2 履帶驅動力計算
履帶車輛的驅動力是由履帶剪切地面產生的,所以計算驅動力可由計算履帶與地面之間的剪切力獲得,由Mohr-Coulomb強度理論可知,土壤單位面積剪切強度τmax與內聚力pn和φ內摩擦角的關系為[3]:
τmax=pn+σntanφ
(9)
式中:pn為土壤的內聚阻力,N;σn為接觸面法向作用力,N;φ為包絡土壤內摩擦角(°)。
由Janosi剪切模型可知,最常遇到的為塑性地面,且剪切力可表示為[3]:
(10)
式中:τmax為土壤單位面積的剪切強度;xj為履帶與地面接觸的剪切位移,m;k為剪切應力作用下變形模量,kN/m2。
履帶與地面之間的剪切應力公式可由公式(9)和(10)推得:
(11)
由于履帶車輛在林間正常行走的時候,履帶與地面之間會出現(xiàn)漂移或者空轉,所以履帶提供的驅動力應考慮漂移或空轉的影響。即應考慮由于該現(xiàn)象產生的驅動損失率γ,驅動損失率γ可由下式表達:
(12)
式中:vs為履帶實際驅動速度,km/h;vL為履帶理論驅動速度,km/h;vx為履帶接觸地面的相對速度,km/h。
(13)
式中:b為履帶的寬度,m;L為與地面接觸履帶長度,m;xs為履帶行駛位移,m;s為履帶與地面的接觸面積,m2。
4.3 履帶行駛阻力計算
履帶車輛正常行駛時會下陷,履帶車輛需將下陷后阻礙行駛的土壤壓實,阻礙履帶車輛行駛的土壤對履帶作用產生行駛阻力。即履帶車輛行駛阻力所做的功為履帶壓實土壤所做的功。履帶行駛阻力計算方法大多采用半經驗公式的方法計算,貝克計算公式是常用的行駛阻力計算方法,通過貝克提出的壓力-下陷關系推導履帶行駛阻力計算方法[11-14]。
貝克提出的壓力-下陷關系為:
(14)
式中:p為接觸面法向壓力,N;x為履帶車輛下陷量,m;kc為土壤內聚力變形模量,kN/mn+1;kφ為土壤內摩擦角變形模量,kN/mn+2;b為履帶的寬度,m;n為土壤變性指數(shù)。
履帶車輛最大下陷量xmax可表示為:
(15)
式中:G為履帶車重力,N;l為履帶車輛行駛距離,m。
履帶車輛行駛過程中壓實土壤所做功可表示為:
(16)
式中:b為壓實土壤寬度即履帶寬度,m。
履帶車輛行駛過程中行駛阻力所做功可表示為:
(17)
式中:FR為行駛阻力,N。
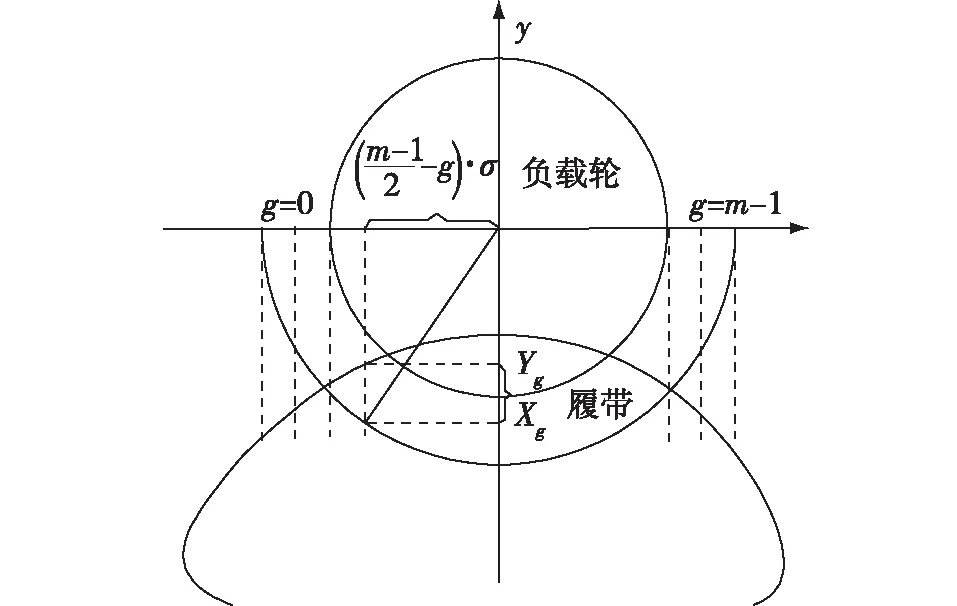
圖9 履帶車輛履帶張緊力、行駛阻力、下陷深度、行駛驅動力理論與仿真值結果對比Fig. 9 Comparison between theoretical and simulated results of tracked vehicle in aspects of track tension,driving resistance, subsidence depth, and driving force
由上式可得行駛阻力FR為:
(18)
5 Adams仿真分析
根據履帶車輛的具體結構參數(shù),利用Adams軟件的ATV模塊建立履帶車輛的仿真模型,分別對履帶車輛的履帶張緊力、下陷深度、行駛驅動力、行駛阻力進行仿真,與本文的理論值進行對比。
本研究選取砂壤土路面進行動力學仿真,在Adams中設置土壤參數(shù)及履帶車輛的運動參數(shù)如表1所示。
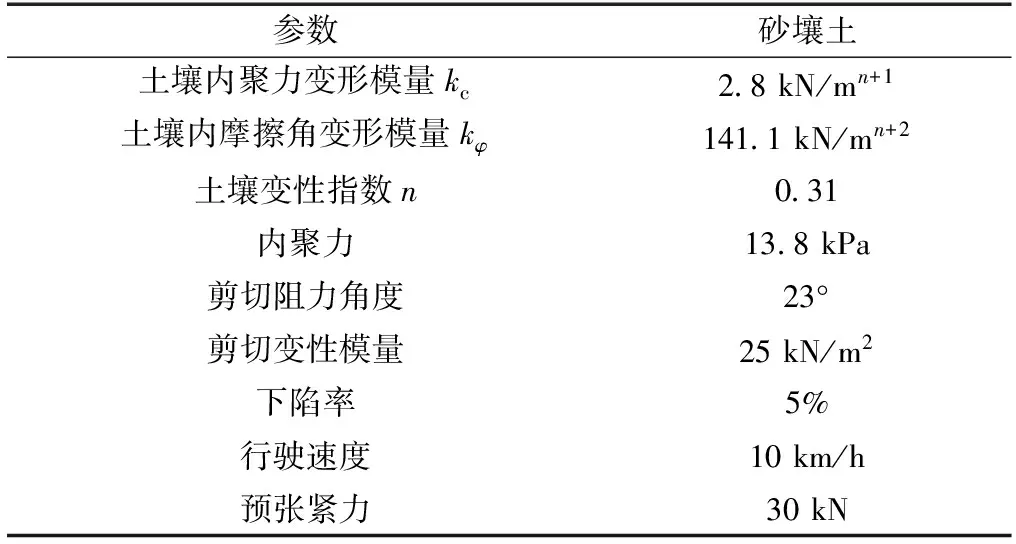
表1 土壤物理性能及履帶車輛運動參數(shù)
履帶車輛在砂壤土上運動時,其履帶張緊力、行駛阻力、下陷深度及行駛驅動力的理論結果和仿真結果的對比如圖9所示。由圖可知,其理論值和仿真值的結果在變化趨勢上基本一致,數(shù)值誤差在20%以內,驗證了本文理論公式的合理性。
6 結 論
筆者分析了各個狀態(tài)下履帶與負載輪、履帶與地面的空間作用關系,得出在履帶、負載輪、地面同時作用是最復雜的作用情況,通過對履帶與負載輪的力學分析得到摩擦力的計算方法,進而得出履帶作用在負載輪上的力和力矩的計算方法,推導出了履帶各段張緊力的計算公式。在履帶和地面的相互作用下,對履帶車輛下陷實際狀況建立數(shù)學模型,推導出了下陷量的計算公式;并以貝克提出的壓力-下陷關系公式為基礎,推導出履帶車輛驅動力及行駛阻力的計算公式,為履帶車輛動力學計算及履帶車輛行走機構的設計提供了理論依據;并通過Adams仿真驗證了本研究理論公式的合理性。
[ 1 ]吉洋. 林用履帶機器人底盤設計與仿真分析[D]. 北京:北京林業(yè)大學,2013:7-11. JI Y.The chassis structure design and simulation analysis of forestry tracked mobile robots[D].Beijing:Beijing Forestry University,2013:7-11.
[ 2 ]朱興高, 顧亮. 履帶對地面的包絡特性研究[J]. 北京理工大學學報, 2016, 36(1):48-52. ZHU X G, GU L. Research on envelope characteristics of the track on ground [J]. Transactions of Beijing Institute of Technology, 2016, 36(1):48-52.
[ 3 ]朱興高. 高速履帶車輛負重輪系-履帶-地面耦合動態(tài)特性研究[D]. 北京:北京理工大學, 2015:10-52. ZHU X G. Coupling dynamic characteristic research for wheels-track-terrain system of high-speed tracked vehicles [D]. Beijing:Beijing Institute of Technology, 2015:10-52.
[ 4 ]閆振華, 王國強, 姚宗偉, 等. 大型履帶行走裝置支重輪和履帶板接觸分析[J]. 農業(yè)工程學報, 2012, 28(17):51-56. YAN Z H, WANG G Q, YAO Z W,et al. Contact analysis on huge crawler track wheel and track pad[J]. Transactions of the Chinese Socity of Agricultural Engineering, 2012, 28(17):51-56.
[ 5 ]黃雪濤, 顧亮, 呂唯唯, 等. 履帶張緊力及其影響因素分析[J]. 兵工學報, 2014, 35(7):1110-1118. HUANG X T, GU L, LYU W W, et al. Track tension and its influencing factors[J]. Chinese Journal of Neuromedicine, 2014, 35(7):1110-1118.
[ 6 ]WONG J Y, HUANG W. An investigation into the effects of initial track tension on soft ground mobility of tracked vehicles using an advanced computer simulation model[J]. Proceedings of the Institution of Mechanical Engineers, Part D:Journal of Automobile Engineering, 2006, 220(6):695-711.
[ 7 ]黃雪濤, 顧亮, 朱興高, 等. 履帶張緊力及其在履帶環(huán)上的分布[J]. 北京理工大學學報, 2016, 36(3):226-230. HUANG X T, GU L, ZHU X G, et al. Track tension and its distribution on track link[J]. Transactions of Beijing Institute of Technology, 2016, 36(3):226-230.
[ 8 ]姚禹. 基于履帶-地面耦合系統(tǒng)的低速履帶車輛通過性研究[D]. 長春:吉林大學, 2016:13-19. YAO Y. Research on the trafficability of low-speed tracked vehicle based on track-soil coupling system[D]. Changchun:Jilin University, 2016:13-19.
[ 9 ]李勇. 多履帶行走裝置關鍵設計技術研究[D]. 長春:吉林大學, 2011:12-42. LI Y. Study on the key design technologies of multi-crawler travelling gear[D]. Changchun:Jilin University, 2011:12-42.
[10]朱興高, 顧亮. 履帶車輛行駛速度對負重輪動位移的影響[J]. 東北大學學報(自然科學版), 2016, 37(4):548-553. ZHU X G, GU L. Effect of tracked vehicle speed on bogie wheels’dynamic displacement[J]. Journal of Northeastern University(Natural Science), 2016, 37(4):548-553.
[11]朱興高, 顧亮. 某型履帶車輛誘導輪結構強度分析[J]. 太原理工大學學報, 2015, 46(3):274-277. ZHU X G, GU L. Structure strength analysis on idler wheel of tracked vehicle[J]. Journal of Taiyuan University of Technology, 2015, 46(3):274-277.
[12]杜漢平. 基于剛-柔耦合履帶起重機虛擬樣機技術研究[D]. 大連:大連理工大學, 2006:12-43. DU H P. Research on virtual prototype technology of rigid-flexible coupled crawler crane[D]. Dalian:Dalian University of Technology, 2006:12-43.
[13]WONG J Y. Dynamics of tracked vehicles[J]. Vehicle System Dynamics, 1997, 28(2):197-219.
[14]遲媛, 張榮蓉, 任潔, 等. 履帶車輛差速轉向時載荷比受土壤下陷的影響[J]. 農業(yè)工程學報, 2016, 32(17):62-68. CHI Y, ZHANG R R, REN J, et al. Steering power ratio affected by soil sinkage with differential steering in tracked vehicle [J]. Transactions of the Chinese Society of Agricultural Engineering, 2016, 32(17):62-68.
Study on coupling relationship of track-load whell-ground
FENG Li, DENG Zhaojun, MA Yan, YANG Chunmei, SONG Wenlong,GUO Can,XU Honggang
(ForestryandWoodworkingMachineryEngineeringTechnologyCenter,NortheastForestryUniversity,Harbin150040,China)
In order to solve the problems concerning track selection, installation,and the power of entire crawler mechanism, this paper analyzed the interaction between track and wheel load, track and ground in various states. When all of them interacted with each other, the force condition was the most complicated. Under the interaction of track and load wheel, the friction between the track and load wheel was analyzed, the calculation method of forces and moments on the load wheel acted by track was provided, and the tension formulas of various track segments were deduced, which would provide a theoretical basis for the track selection, installation and commissioning. Under the interaction of track and ground, the mathematical model of subsidence of tracked vehicle was established, the formulas of sag amount, and the driving force and the running resistance were deduced,which would provide a theoretical basis for the dynamic calculation and travelling mechanism design of tracked vehicle, and would be beneficial to shorten its design cycle. The simulations on track tension, travelling resistance, subsidence depth, and driving force were accomplished by using software ADAMS. The numerical error between the simulation data and the theoretical data is lower than 20%.The rationality of the theoretical formula is verified.
friction; tension; driving force; travelling resistance; simulation
2016-10-21
2017-03-15
國家林業(yè)公益性行業(yè)科研專項(201504508)。
馮莉,女,副教授,研究方向為林業(yè)機械。E-mail:fengli86@163.com
S776.01
A
2096-1359(2017)04-0115-06
