基于PXI總線架構的螺旋槳電子控制器便攜仿真設備研究
2017-08-07 14:27:36常博博趙剛時培燕
電子測試 2017年10期
常博博,趙剛,時培燕
(中國航空工業集團公司西安航空計算技術研究所,陜西西安,710065)
基于PXI總線架構的螺旋槳電子控制器便攜仿真設備研究
常博博,趙剛,時培燕
(中國航空工業集團公司西安航空計算技術研究所,陜西西安,710065)
針對螺旋槳電子控制器研制、調試、外場試驗、驗收等要求,設計基于PXI總線架構的螺旋槳電子控制器便攜仿真設備。本文以某型螺旋槳數控系統為對象,從架構設計、總體硬件接口設計、軟件設計、仿真驗證四個方面開展工作,結果表明所設計的便攜仿真設備仿真結果正確,滿足設計要求,具有工程應用價值。
螺旋槳系統;電子控制器
1 研究背景
渦槳發動機螺旋槳系統的主要作用為將發動機輸出功率轉化為飛機所需的拉力及功率。為了保證螺旋槳系統穩定可靠的運行,需設計螺旋槳控制系統。在開展螺旋槳系統數字電子控制器的研制、調試、外場試驗、驗收等過程中,仿真驗證已成為必不可少的支撐手段,可有效地規避將控制器直接應用于被控設備所帶來的高投入、高風險等因素。
2 便攜仿真設備架構設計
基于PXI總線架構的便攜仿真設備平臺主要組成包括一臺PXI總線機箱、一塊PXI總線控制器及多塊功能接口模塊構成。PXI總線機箱主要安裝PXI控制器及各種接口控制模塊,主要實時完成接口測試、控制運算、通信等功能,多塊功能接口模塊主要完成螺旋槳電子控制器外圍接口特性的調理。
對于本螺旋槳電子控制器便攜仿真設備,除上述PXI架構所必需的組成外,增加了信號調理箱,其主要目的為模擬電子控制器接口中的電磁閥等大功率負載。螺旋槳電子控制器便攜仿真設備主要架構組成如圖1所示。
螺旋槳電子控制器便攜仿真設備主要組成包括硬件組成和軟件組成兩部分。硬件組成完成接口信號模擬、調理、運算,執行機構的模擬、負載系統的模擬等功能。軟件主要完成系統自動測試、手動測試、仿真驗證等工作。在總體架構設計完成的基礎上首先建立螺旋槳電子控制器的硬件接口測試環境,并模擬控制器各類需求信號;其次在仿真平臺搭建完成的前提下,實現螺旋槳系統仿真功能的驗證。

圖1 螺旋槳電子控制器便攜式硬件在環仿真平臺結構圖
3 便攜仿真設備硬件平臺組成
對于本文研究的螺旋槳仿真平臺,主要包括飛控端和螺旋槳端信號的模擬。硬件平臺主要包括信號PXI系統組成、信號模擬系統、執行機構模擬系統組成。
3.1 PXI控制器
PXI控制器采用PXI-3950,用于整個便攜仿真設備的綜合控制運算。
3.2 信號模擬系統
3.2.1 轉速信號模擬
轉速信號為頻率和幅值變化的高頻正弦信號,由螺旋槳模型實時計算并將轉速值輸出轉換為控制器可識別的正弦信號,轉速信號的頻率值大小隨轉速增大而增加。頻率信號通過DDS技術實現,采用FPGA加DA控制輸出。
3.2.2 扭矩信號模擬
扭矩信號也為頻率和幅值變化的高頻正弦信號,模型根據螺旋槳功率和轉速等參數計算對應的扭矩值,并轉換為電子控制器可識別的正弦信號,轉速信號的頻率值大小隨轉速增大而增加,最終頻率信號通過DDS技術實現,采用FPGA加DA控制輸出。
3.2.3 槳葉角LVDT信號
螺旋槳槳葉角通過LVDT傳感器,工作方式為六線制。LVDT采用CPCI-75DL1模擬卡實現。
3.3 執行機構模擬
執行機構為槳距控制器伺服電磁閥,控制電流-40mA~40mA,通過模擬負載匹配電磁閥阻抗實現。同時通過PXI-6251實現負載電壓的采集運算。
4 便攜仿真設備軟件設計
4.1 軟件架構設計
仿真軟件采用NI公司的Labwinds/CVI平臺開發。仿真軟件包括測試軟件和仿真軟件兩部分組成。測試軟件完成控制器接口手動、自動測試,仿真軟件完成電子控制器硬件在回路仿真驗證功能。仿真軟件具備系統自檢、控制功能運算、任務調度、人機界面、數據保存和系統服務等功能。
4.2 軟件組成及功能要求
4.2.1 測試軟件
測試軟件應能完成電子控制器所有接口信號的手動、自動測試,通過手動/自動輸入或輸出實現電子控制器的單路信號測試,主要用于控制器調試、驗收等工作。
4.2.2 仿真軟件
仿真軟件完成電子控制器硬件在回路仿真驗證功能。該軟件內嵌螺旋槳實時數學模型及執行機構模型軟件,實現螺旋槳在不同工作狀態下的功能性能仿真驗證。該仿真軟件調用周期為20ms。
4.2.2.1 螺旋槳實時數學模型
螺旋槳實時數學模型是進行電子控制器硬件在回路仿真的核心組成部分,模型實時計算控控制器所需的信號大小,仿真設備將數值信號轉換為電子控制器所需的電信號,最后通過信號調理箱輸入給螺旋槳電子控制器。螺旋槳實時數學模型包括螺旋槳起動過程模型、穩態運行非線性實時數學模型、停車過程模型。根據螺旋槳工作的條件,本文所建立的螺旋槳模型對外輸入參數為:高度(ALTP)、馬赫數(AM)、槳葉角(Beta)、需求功率(HpExt)、轉速(XNDP)等,實際輸出參數包括螺旋槳轉速(NP)、扭矩(TQ)等參數信息。
4.2.2.2 槳距執行機構模型
螺旋槳槳葉角變化主要通過槳距控制電液伺服閥。電子控制器根據輸入參數值,實時計算相應的控制輸出指令,將電流信號輸出給電液伺服閥,電液伺服閥控制角度變化大小。本文通過槳距控制器工作特性,建立伺服閥電流與角度變化關系方程,即Δβ=f(PCU_I)。Δβ為槳葉角變化量,PCU_I為伺服閥電流。
5 仿真驗證
本文以某螺旋槳數字電子控制系統為研究對象,進行該型螺旋槳硬件在回路仿真的驗證。仿真功能主要包括慢車、起飛、爬升等狀態驗證,最終獲得螺旋槳全過程的仿真結果,其中典型階段仿真結果如圖2和圖3所示。
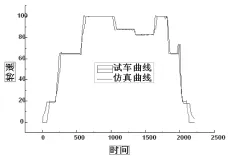
圖2 全狀態下轉速仿真結果
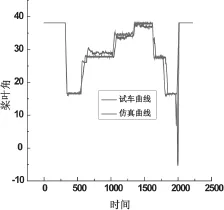
圖3 全狀態下槳葉角仿真結果
通過仿真驗證,表明硬件在回路仿真數據計算準確,能夠有效的進行螺旋槳系統和電子控制器軟硬件功能性能的綜合驗證。該系統的建立為開展螺旋槳全權限數字控制系統進一步的分析、設計、研制和驗證提供了很好的試驗平臺。
6 總結
本文針對國內目前螺旋槳數字控制仿真系統的不足,利用已有的軟硬件資源,建立了基于PXI架構的螺旋槳系統便攜仿真設備。將螺旋槳數學模型、信號模擬與處理、執行機構等部分獨立設計,能夠實現螺旋槳系統的硬件在回路仿真,有利于螺旋槳數字電子控制器的研制開發,縮短開發周期,具有良好的工程實用性,可以為螺旋槳數字式電子控制系統設計與仿真提供支持。
[1]李迎.基于PXI的實時仿真測試系統構建技術研究[J].計算技術與自動化,2013年12月.
[2]王超,楊恒輝.便攜式APU數控系統硬件在環仿真平臺研究[J].計算機測量與控制.2016.04.
Research on Portable Simulation Device of Propeller Electronic Controller Based on PXI Bus Architecture
Chang Bobo,Zhao Gang,Shi Peiyan
(AVIC Xi’an Aeronautics Computing Techinque Research Institute,Xi’an Shaanxi,710065)
Aiming at the requirements of the development and debugging of the propeller electronic controller,the portable simulation equipment based on the PXI bus architecture is designed In this paper,a kind of propeller coantrol system is designed ,which is based on the architecture design,the overall hardware interface design ,the software design and the simulation verification.The result show that thedesigned simulation results are correct,meet the designed requirments and have the engineering application value
propeller system;electronic controller
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
中國特種設備安全(2022年6期)2022-09-20 02:52:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年11期)2018-08-04 03:25:42
中國科技論壇(2017年7期)2017-07-25 08:49:53
工業設計(2016年12期)2016-04-16 02:52:00
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
消費者報道(2014年7期)2014-07-31 11:23:57
