一種自適應臂架支撐及其控制方法
2017-08-08 03:01:25周志紅田相玉
制造業自動化 2017年7期
關鍵詞:結構
周志紅,曹 奎,田相玉
(中聯重科混凝土機械公司,長沙 410013)
一種自適應臂架支撐及其控制方法
周志紅,曹 奎,田相玉
(中聯重科混凝土機械公司,長沙 410013)
目前混凝土泵車市場上,臂架支撐均以剛性支撐為主,文中以RZ型臂架泵車為例,闡述一種新型自適應臂架支撐結構,改善了剛性臂架支撐結構性缺陷,降低了裝配勞動強度,提高了生產效率,同時也符合混凝土泵車產品智能化的發展趨勢。
混凝土泵車;臂架支撐;使用壽命;自適應
0 引言
混凝土泵車是一種用于輸送和澆注混凝土的專用設備,它可以將混凝土沿著輸送管道連續泵送到澆注現場,逐漸成為了建筑施工中不可或缺的關鍵設備[1]。其中臂架系統作為泵車的關鍵部件,其安全、可靠性是決定泵車核心競爭力的關鍵因素之一。近年來,中聯、三一、徐工等國內大型工程機械企業分別收購意大利CIFA、德國大象、德國施維英后,中國的混凝土泵車技術水平已位于世界前列,隨著混凝土泵車泵送高度的不斷增加,其臂架輕量化技術的競爭達到白熱化的程度[2]。由于臂架輕量化技術的不斷深入,臂架因臂長、自重、加工精度、裝配精度等多因素的影響下,臂架回收折疊后,因其支撐部位的工作尺寸偏差,導致在生產時,臂架支撐與折疊后的臂架匹配狀態不一,從而直接影響制造裝配工藝及臂架系統本身性能。本文以主流RZ型臂架泵車為例,來闡述一種新型自適應臂架支撐結構。
1 剛性臂架支撐結構
目前混凝土泵車市場上,臂架支撐模式均為剛性支撐結構(如圖1所示);因其二臂支撐位置與三臂支撐位置落差尺寸為恒定值,這對制造、裝配提出了更高的要求,同時還要考慮臂架因自身長度與自重產生的變形量。根據泵車實際生產裝配效果來看,剛性臂架支撐結構經常出現以下情形:1)二臂或三臂落不到位;2)通過一臂油缸或三臂油缸行程余量強行將臂架下壓,造成臂架本體裝配應力過大,從而導致臂架變形影響其使用壽命;3)出現三臂支撐座需現場調整長度,現場配焊等現象。
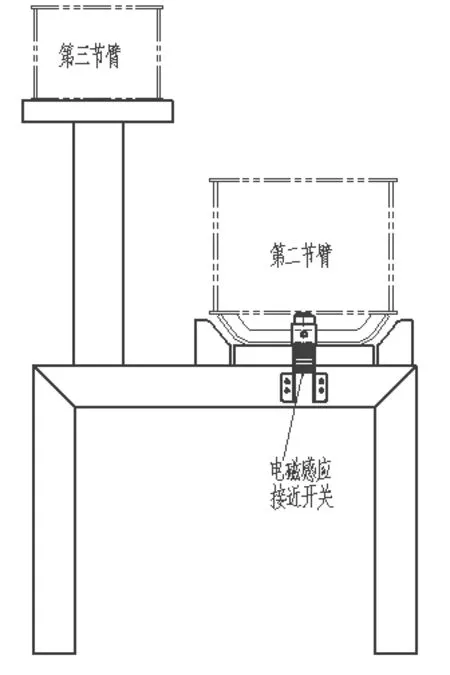
圖1 剛性臂架支撐結構
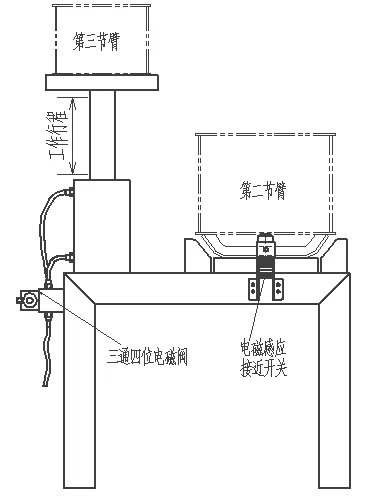
圖2 新型臂架支撐結構
2 自適應臂架支撐結構及其控制方式
鑒于目前剛性臂架支撐自身結構特點,本文嘗試一種新型自適應臂架支撐結構(如圖2所示),融合了機、電、液技術特點,消除了剛性臂架支撐結構形式帶來的不利影響,降低了臂架向后展臂時的最小高度,同時提高了生產效率和延長臂架系統使用壽命等特點。其自適應臂架支撐液壓控制系統如圖3所示,工作原理如下:
泵車收臂工況:大臂回收,二臂支撐接近開關檢測到二臂回收到位信號后,控制器控制電磁換向閥a電磁鐵得電,此時三位四通電磁閥左位工作,P口和A口導通,B口和T口導通,壓力液壓油從臂架多路閥P口經三位四通電磁閥至頂伸油缸無桿腔,此壓力油同時將液壓鎖打開,頂伸油缸活塞桿帶動三臂支撐座伸出,此過程壓力傳感器會檢測頂伸油缸無桿腔壓力,當頂伸活塞桿驅動三臂支撐支撐到三臂結構后,頂伸油缸無桿腔壓力會迅速上升,當該壓力上升至設定負載壓力時,控制器控制三位四通電磁閥電磁鐵失電,此時頂伸油缸無桿腔液壓油被液控單向閥鎖住,系統保持當前的支撐狀態。
泵車展臂工況:大臂展開,二臂支撐接近開關檢測到二臂離位信號后,控制器控制電磁換向閥b電磁鐵得電,此時三位四通電磁閥右位工作,P口和B口導通,A口和T口導通,壓力液壓油從臂架多路閥P口經三位四通電磁閥至頂伸油缸有桿腔,此壓力油同時將液壓鎖打開,此時液控單向閥允許液壓油反向流動。壓力油驅動頂伸油缸活塞桿帶動三臂支撐座收回。
經如圖3所示的液壓控制系統分析,我們知道臂架支撐油缸動作完全由控制器邏輯程序控制。為了避免電磁感應接近開關誤傳信息,如人為誤操作使電磁感應接近開關感應到鋼件而此時臂架系統正處于泵送工作狀態的情況,則要求整機控制系統有一套邏輯控制程序,防止此類問題發生,避免重大事故,確保施工安全。經分析整機控制系統中此功能判斷邏輯關系可采用如圖4所示方案。
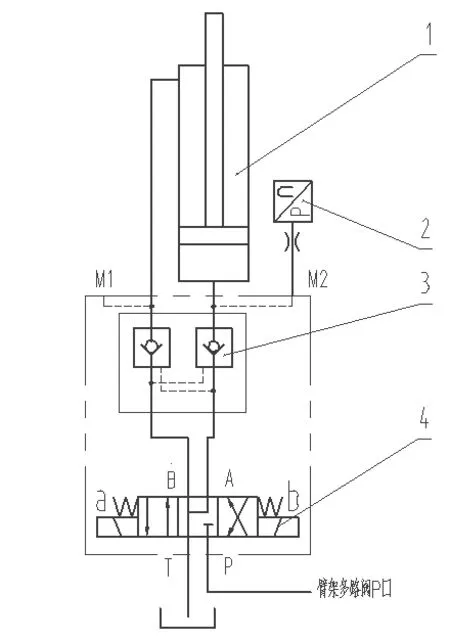
圖3 液壓控制系統示意
3 結束語
綜上所述,自適應臂架支撐結構很好的解決了目前剛性臂架支撐自身結構缺陷:無法微調工作尺寸、制造現場反復調整、生產效率低等特點,加強了對臂架系統的防護,提高臂架系統的可靠性與使用壽命。另一方面,新型臂架支撐結構為客戶降低維護成本的同時提高了設備的使用壽命,取得了良好的經濟效益。
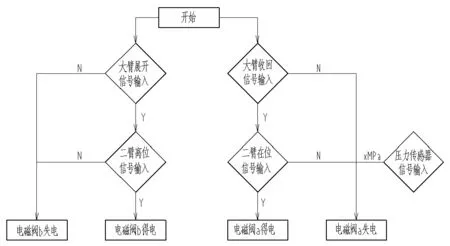
圖4 系統判斷邏輯圖
[1] 黃毅,吳斌興,王佳茜,等.混凝土泵車臂架振動響應的主動控制實驗研究[J].振動與沖擊.2012.31(2):91-94.
[2] 馬洪鋒,陸永能,李雪玲.混凝土泵車臂架屈曲試驗與分析[J].工程機械.2015.46(11):27-33.
An adaptive boom support and it’s control method
ZHOU Zhi-hong, CAO Kui, TIAN Xiang-yu
TU646
:B
1009-0134(2017)07-0136-02
2017-03-30
周志紅(1978 -),男,湖南岳陽人,碩士,研究方向為混凝土泵車設計。
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50
