岸橋遠程系統中的CCTV系統簡介
2017-08-08 03:01:25姚之泓
制造業自動化 2017年7期
朱 錚,姚之泓
(上海振華重工集團有限公司,上海 200215)
岸橋遠程系統中的CCTV系統簡介
朱 錚,姚之泓
(上海振華重工集團有限公司,上海 200215)
主要介紹了常規遠程岸橋項目中CCTV系統的網絡拓撲、攝像機以及顯示器的選型、配置和應用,并簡單展望了未來的發展方向。
CCTV系統;岸橋;遠程控制
0 引言
伴隨著工業4.0和傳統集裝箱碼頭轉型的大潮,位立于碼頭生產第一線的岸橋也早已揭開了改革的步伐,無論是機械意義上的3E橋吊,還是控制系統上的岸橋遠程操作系統都是現代岸橋的最領先技術。若將岸橋遠程操作系統比作一個人體的話,那CCTV系統就是岸橋遠程操作系統的眼睛,它能夠讓岸橋司機在遠離岸橋本地的情況下實時掌握岸橋整機的狀態并完成相應的工況操作,尤其是在最先進的自動化碼頭中[1],岸橋的遠程操作已經成為其必要條件,若岸橋能夠有一雙明亮的“大眼睛”,不僅僅是作業安全方面,對于操作效率等也能提供很大的幫助。
1 遠程CCTV系統概述
系統通過安裝在岸橋前大梁、梯形架、后大梁、小車架、鞍梁、門架、門架小車、理貨室等部位的CCTV攝像機掌握現場的工作情況,并依據圖像系統來輔助司機完成著箱等一系列的工作,從而保證岸橋能高效、可靠、安全的工作;通過在PLC電氣房、理貨室、遠程操作站安裝IP網絡廣播、對講系統實現實時通訊;通過安裝門禁系統保障安全[2]。
2 攝像機的選擇
網絡數字攝像機:相比于傳統的模擬攝像機,現今的網絡數字攝像機具備眾多的優勢和先進的功能,更高質量圖像能夠更好的幫助岸橋司機對準鎖孔抓箱;可遠程訪問功能使得岸橋維護人員能夠在任何地方隨時查看工作實況以及視頻記錄;智能防抖動功能可以非常有效的減小小車運行時抖動給攝像機帶來的共振影響等。
適合岸橋操作環境:由于岸橋是室外作業,所以攝像機的監控場景亮度會不斷的發生變化,夜晚、煙霧、雨水等外部環境條件都會影響攝像機的圖像質量,所以所選擇攝像機需要有很強鏡頭聚光能力、光圈自動控制更好、日夜自動切換技術、寬動態技術。
表1是攝像機選擇的一些推薦值[3]。

表1 攝像機類型
3 岸橋攝像機的分布
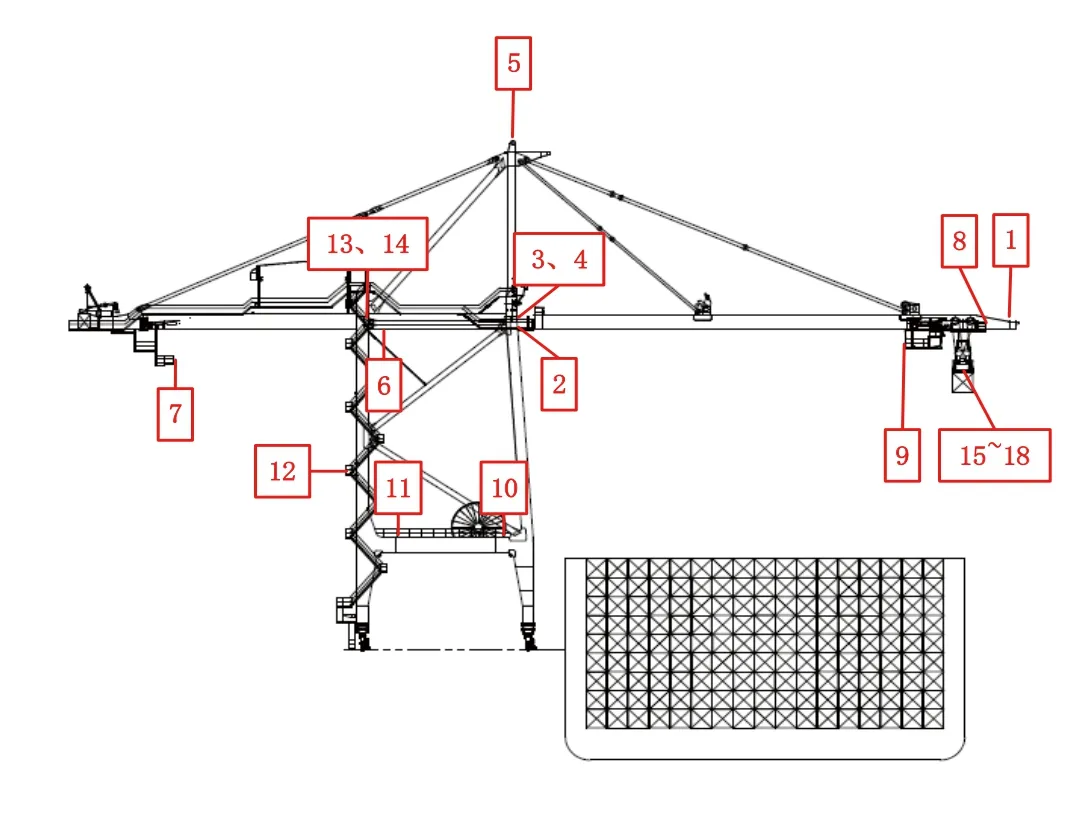
圖1 攝像機布置圖
4 遠程操作站顯示
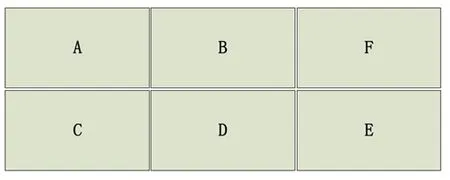
圖2 遠程操作站顯示器布置
如圖2所示,一個遠程操作臺配套6個顯示器以及2臺塔式服務器。顯示器A、B和C由遠程操作臺左側服務器控制;顯示器D、E和F由遠程操作臺右側服務器控制。顯示器主要功能為顯示每臺橋吊上的攝像頭實時圖像信息以及實時狀態信息,為了滿足和符合司機在實際操作以及作業環境的需求。
顯示器E整合攝像頭實時圖像信息以及監控系統(CMS)的實時狀態信息,滿足司機實時了解橋吊的各種必要狀態信息以及實時故障信息,比如起升,小車位置信息。其他顯示器則整合了整機的攝像機組合成八個視角和各畫面的切換以方便司機了解岸橋狀況。
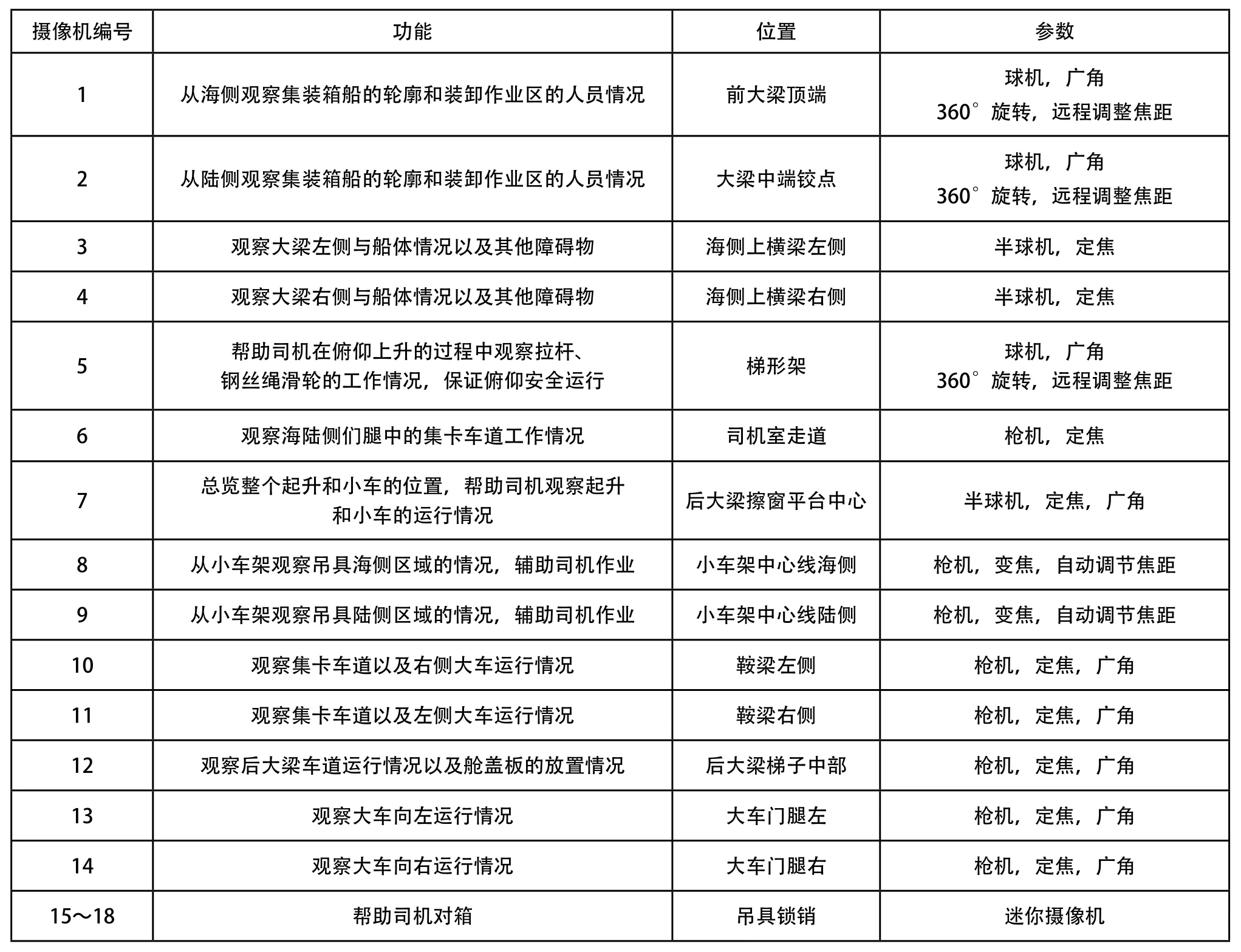
表2 攝像機布置位置

圖3 大車緩沖器畫面

圖4 俯仰畫面
視角一:大車兩側緩沖器。
主要觀察點:
軌道兩側有無障礙物;觀察船梯位置:清除障礙物,保證大車行走安全。高壓電纜井位置:高壓電纜井位置注意大車速度變化,控制手柄,減少大車運行吊具搖擺量。注意觀察高壓電纜井周圍運行安全。
系纜樁號碼;碼頭標尺號碼:結合CMS清楚大車位置。
緩沖器相距距離;緩沖器壓縮狀態:緩沖器觀察清楚了解相鄰橋吊大車位置。
視角二:俯仰畫面。
大梁走道:觀察大梁是否有人或雜物;
大梁兩側:觀察是否有障礙物,與障礙物的距離;
斜拉桿入槽情況觀察,大車左右行與集裝箱船是否有干涉情況。
視角三:軌距內海側畫面。

圖5 軌距內畫面
軌距內:是否有人和機械;作業環境和條件。
集卡車道:看是否有集卡被吊起情況,集裝箱對集卡情況,集裝箱車滯留情況。
視角四:梯子中部看后大梁。

圖6 梯子中部畫面
后伸距作業觀察:
艙蓋板作業:作業位置,作業情況,作業高度。
視角五:后側觀察畫面。

圖7 后大梁總覽畫面
岸橋整機總覽情況:
船側艙蓋板位置,相鄰貝為作業環境;
大車運行對照貝位位置;靠離船觀察。
視角六:前大梁作業,鉸點右側觀察。
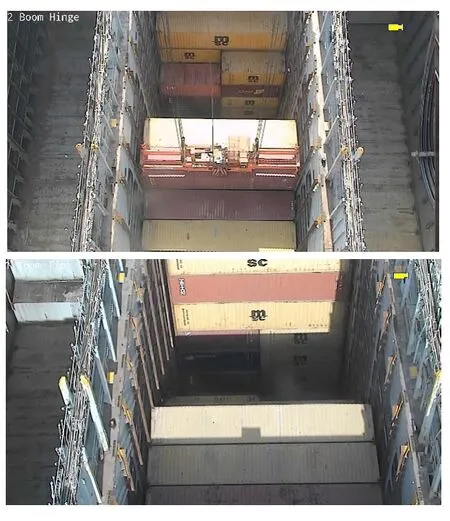
圖8 前大梁、鉸點畫面
船側位置觀察作業位置;
靠離船觀察。
可伸縮距離觀察是否有掛艙以及船上人員工作情況。
視角七:俯仰鉤區觀察。

圖9 俯仰鉤區畫面
觀察俯仰鉤區位置,在梯形架位置最直觀的觀察岸橋俯仰運行時的狀態。
視角八:主吊具觀察。
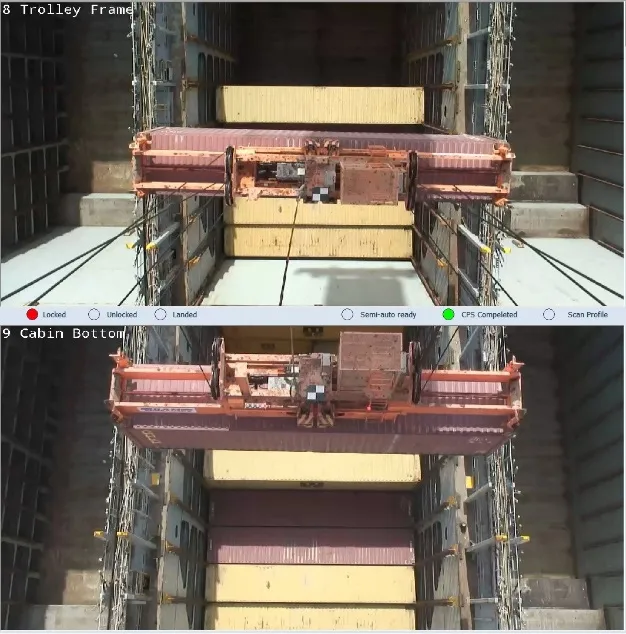
圖10 主吊具畫面
傳統的司機室角度:
海側,陸側觀察:
吊具跟隨觀察;
大車運行觀察;
俯仰軌距內觀察。
5 網絡拓撲結構
考慮到攝像機畫面的傳輸質量以及穩定性,攝像機通訊傳輸介質主要推薦光纜。岸橋上的攝像機通過網線將數據傳輸到光電轉換模塊,再由光電轉換模塊將所有畫面集成于岸橋上的CCTV服務器中,然后遠程服務器與岸橋本地服務器通過光纜進行通訊,這樣既能保證岸橋本地畫面高質量的傳輸,同時也可以保證畫面的實時性,這點對于遠程岸橋操作來說極其重要,若畫面有短暫的延遲,那將極大的影響司機抓取集裝箱的操作。最后遠程操作站視頻通過讀取本地服務器上的畫面來顯示岸橋的整機狀態。

圖11 網絡拓撲結構圖
6 結束語
遠程操作控制系統在保證裝卸效率的前提下,相比于原先在起重機上振動搖晃的工作環境,遠程控制可以給操作人員一個相對比較舒適安靜的環境進行工作。如今的集裝箱運輸發展中,岸橋的起升高度日趨升高。用傳統的操作模式對操作人員的要求已經越來越高,若借助于CCTV系統,原本50米高的地面將可以清晰地展現于眼前。伴隨著VR技術以及攝像機測距技術的越來越成熟,這將是下一代CCTV技術的發展趨勢,且CCTV系統的功能將越來越多、越來越強。遠程操作可以在科技的幫助下降低操作人員的工作強度,提高效率。相比于傳統的司機一對一操作方式,實現了一對多的可能,大大減少了在人力成本上的花費,這對于任何一個碼頭來說都是不可抗拒的經濟誘惑。因此其市場前景也必然會變得樂觀。
[1] 李振廣.單起升岸橋遠程自動化操作技術難點及解決方案[J].,集裝箱化,2014,9.
[2] 李占軍,申少鵬,劉建玲.論遠程監控系統在港口設備中的應用[J].才智,2011.
[3] 網絡視頻技術指南[EB/OL].http://www.axis.com,2006.
The introduction of remote control STS's CCTV system
ZHU Zheng, YAO Zhi-hong
TH215
:A
1009-0134(2017)07-0147-05
2017-05-17
朱錚(1985 -),男,上海人,工程師,本科,研究方向為電氣工程及其自動化。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08
