基于Super-twisting控制器的永磁同步電動機無傳感器直接轉矩控制
2017-08-08 05:18:57遲長春耿晉中李明明
上海電機學院學報 2017年3期
楊 鑫, 遲長春, 耿晉中, 李明明
(上海電機學院 電氣學院, 上海 201306)
?
基于Super-twisting控制器的永磁同步電動機無傳感器直接轉矩控制
楊 鑫, 遲長春, 耿晉中, 李明明
(上海電機學院 電氣學院, 上海 201306)
永磁同步電動機(PMSM)參數易受無規律、非線性噪聲擾動的影響;在直接轉矩控制中定子磁鏈的計算多因采用純積分環節而使觀測精度不高,從而產生較大的轉矩脈動和磁鏈脈動等。針對上述問題,利用擴展卡爾曼濾波(EKF)觀測器實現對PMSM轉速、位置、磁鏈的準確觀測;同時,由于PI控制器對電動機參數變化較為敏感,設計一種Super-twisting控制器代替轉矩PI控制器和參考電壓矢量估算模塊,并將準滑動模態中的sigmoid(s)函數代替符號函數sgn(s),進一步增強了系統魯棒性,且減少了系統的復雜性。仿真研究表明,EKF觀測器可以準確地對電動機轉速、位置、磁鏈進行觀測,同時Super-twisting控制器也進一步降低控制系統的轉矩脈動,提高轉速的觀測精度。
Super-twisting控制器; 擴展卡爾曼濾波; 永磁同步電動機; 直接轉矩控制
永磁同步電動機(Permanent Magnet Synchronous Motor,PMSM)擁有機械效率高、功率因數高、出力大等明顯優勢,已經被應用到越來越多的高性能場合,發展前景巨大,成為近年來電氣傳動領域的研究熱點。直接轉矩控制沒有矢量控制的復雜坐標變換,可直接對轉矩進行控制,且動態性能良好,國內、外已有許多學者進行相關研究,并取得了相當多的研究成果[1-7]。雖然直接轉矩控制在異步電動機和感應電動機中的應用相對成熟,但在同步電動機中的應用還需進一步深入研究。
傳統的直接轉矩控制多采用電壓矢量表和積分磁鏈觀測器為核心模塊。電壓矢量表的好壞關系到控制系統的優劣,而積分磁鏈觀測器由于純積分環節的影響會產生較大的磁鏈脈動。文獻[8-10]中對電壓矢量表進行了精確地細分,改進了電壓矢量開關表,有效地降低了系統的轉矩脈動和磁鏈脈動,但也增加了計算量。文獻[11-14]中利用空間矢量調制技術代替電壓矢量表最優電壓的選取,直接合成最優電壓矢量,更準確地控制逆變器開關,減少轉矩脈動。文獻[15-17]中用一階滑模控制器代替滯環控制調節器,減小了PI調節器對電動機參數的敏感性,增強了控制系統的魯棒性,但一階滑膜控制器仍然存在“抖振”問題。文獻[18-20]中利用擴展卡爾曼濾波器(Extended Kalman Filter, EKF)觀測器對定子磁鏈進行觀測,避免了純積分環節對磁鏈估測的影響,提高了磁鏈的觀測精度。
本文將Super-twisting控制器引入PMSM無傳感器直接轉矩控制,利用EKF觀測器解決純積分磁鏈觀測器產生的較大磁鏈脈動,并能夠實現無傳感器控制,同時Super-twisting控制器也能進一步減小轉矩脈動、增強控制系統性能。
1 PMSM直接轉矩控制的基本理論
PMSM在α-β靜止坐標系下的電壓方程為[21]
(1)
磁鏈方程為
(2)
電磁轉矩方程為

(3)
運動方程為

(4)
式中,uα、uβ分別為α、β軸定子電壓;Rs為定子電阻;iα、iβ分別為α、β軸的電流;Ψα、Ψβ分別為α、β軸的磁鏈;Ls為隱極式PMSM電感;Ψf為永磁體的磁鏈;θe為轉子位置角;Te為電磁轉矩;pn為三相PMSM的極對數;TL為電動機負載轉矩;ωr為轉子機械角速度;B為黏滯系數;J為轉動慣量。
PMSM在d-q坐標系下的電壓方程為[22]
(5)
磁鏈方程為
(6)
式中,ud、uq分別為定子電壓在d、q軸上的分量;id、iq分別為定子電流在d、q軸上的分量;Ψd、Ψq為定子磁鏈在d、q軸上的分量;Ld、Lq分別為電感在d、q軸上的分量,隱極式PMSM滿足
Ld=Lq=Ls
電磁轉矩方程為
(7)
2 EKF觀測器設計
EKF是一種計算非線性系統的觀測器,且當系統中存在隨機噪聲時,仍能夠對系統狀態進行準確估計,可以避免傳統純積分計算磁鏈產生的直流分量問題。根據系統運行特性,EKF觀測系統選取狀態變量為
x=[ΨαΨβωrθe]T
(8)
控制輸入變量為
u=[uαuβ1]T
(9)
定子電流矢量為
y=[iαiβ]T
(10)
作為輸出變量。
由式(1)和(2)可得:
(11)

(12)
轉子位置角微分方程為
dθe/dt=ωr
(12)
因此,EKF觀測器的狀態方程可表示為
(14)
式中,
為便于計算,對EKF觀測器非線性方程進行離散化處理,得
x(k+1)=f(x(k))+B(k)u(k)+v(k)
(15)
y(k)=C(k)x(k)+w(k)
(16)
式中,v(k)為由于電動機參數變化所導致的誤差矢量;w(k)為由于信號采集、測量不準確所引起的誤差矢量。
假設w(k)、v(k)相互獨立,均值都為零,且滿足如下特性:
(17)
式中,E為期望;Qkj為wk與wj協方差陣;Rkj為vk與vj的協方差陣。
給定EKF狀態觀測系統的初始狀態,實現對PMSM直接轉矩控制系統磁鏈、轉速和轉子位置的觀測。EKF觀測算法流程如下:
(1) 計算狀態預測值為

(18)

(2) 計算輸出預測值為

(19)
(3) 計算預測誤差協方差矩陣為


(20)
(4) 計算EKF的增益矩陣為
K(k+1)=

(21)



(22)
系統初始狀態下,本文取:
3 Super-twisting控制器設計
為進一步減小EKF觀測器在直接轉矩控制中的轉矩脈動,增強系統的魯棒性,本文設計一種Super-twisting控制器代替PI控制器,減小PI控制器對電動機參數變化的敏感性。
3.1 Super-twisting控制原理
二階滑模變結構用于控制二階系統的輸出,可以避免一階滑膜系統所產生的抖振。一般,非線性動態系統為[23]
(23)
式中,x1∈Rn為狀態變量;u1∈R為控制系統的輸入變量;y為控制系統的輸出;滑模變量函數a(t,x1)、b(t,x1)均為連續、未知函數;σ(t,x1)稱為滑模面函數,當控制系統在有限時間內到達滑模面時,σ(t,x1)=0,系統的任何有界輸入都將會在有限時間內在滑模面內收斂。
σ(x,t1)的二階導函數為

(24)

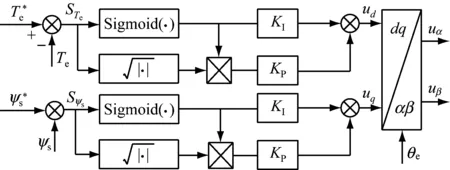
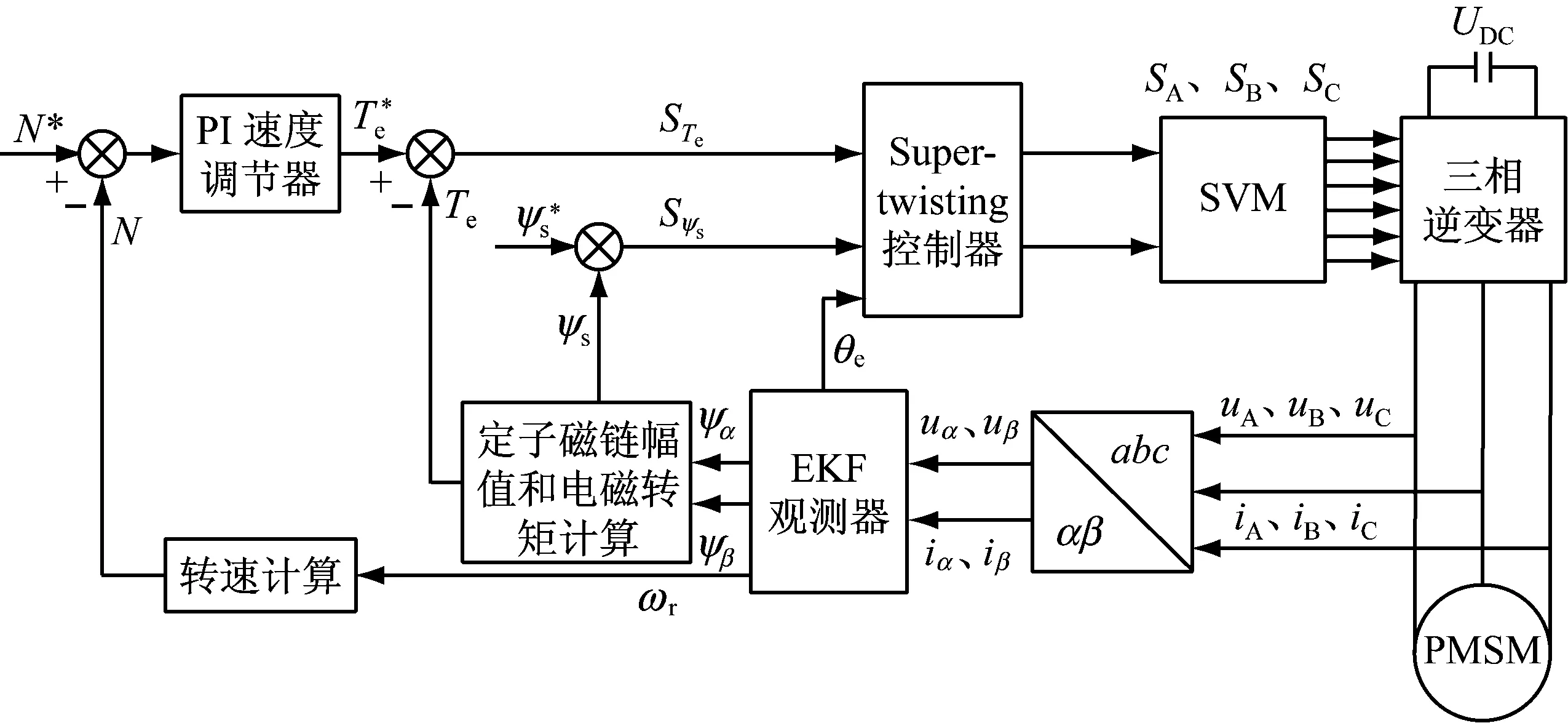
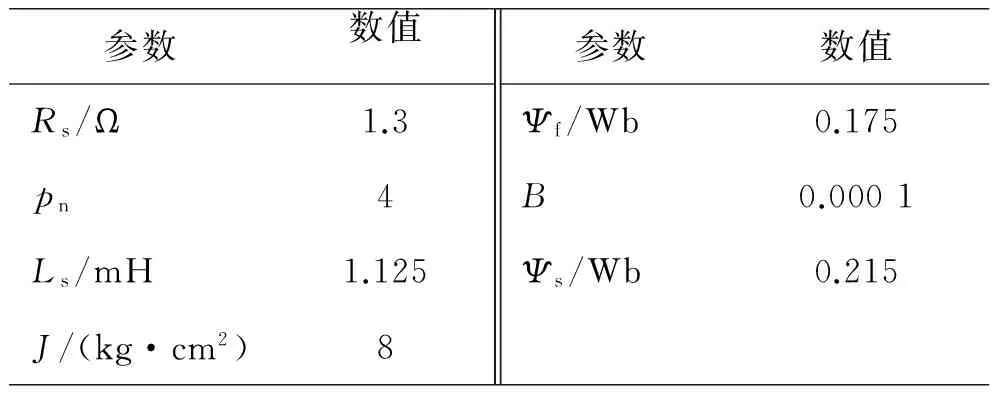
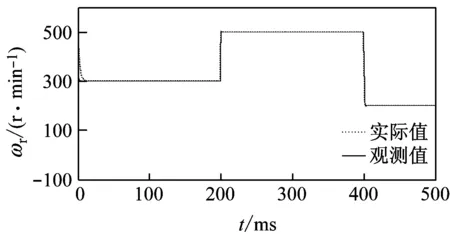
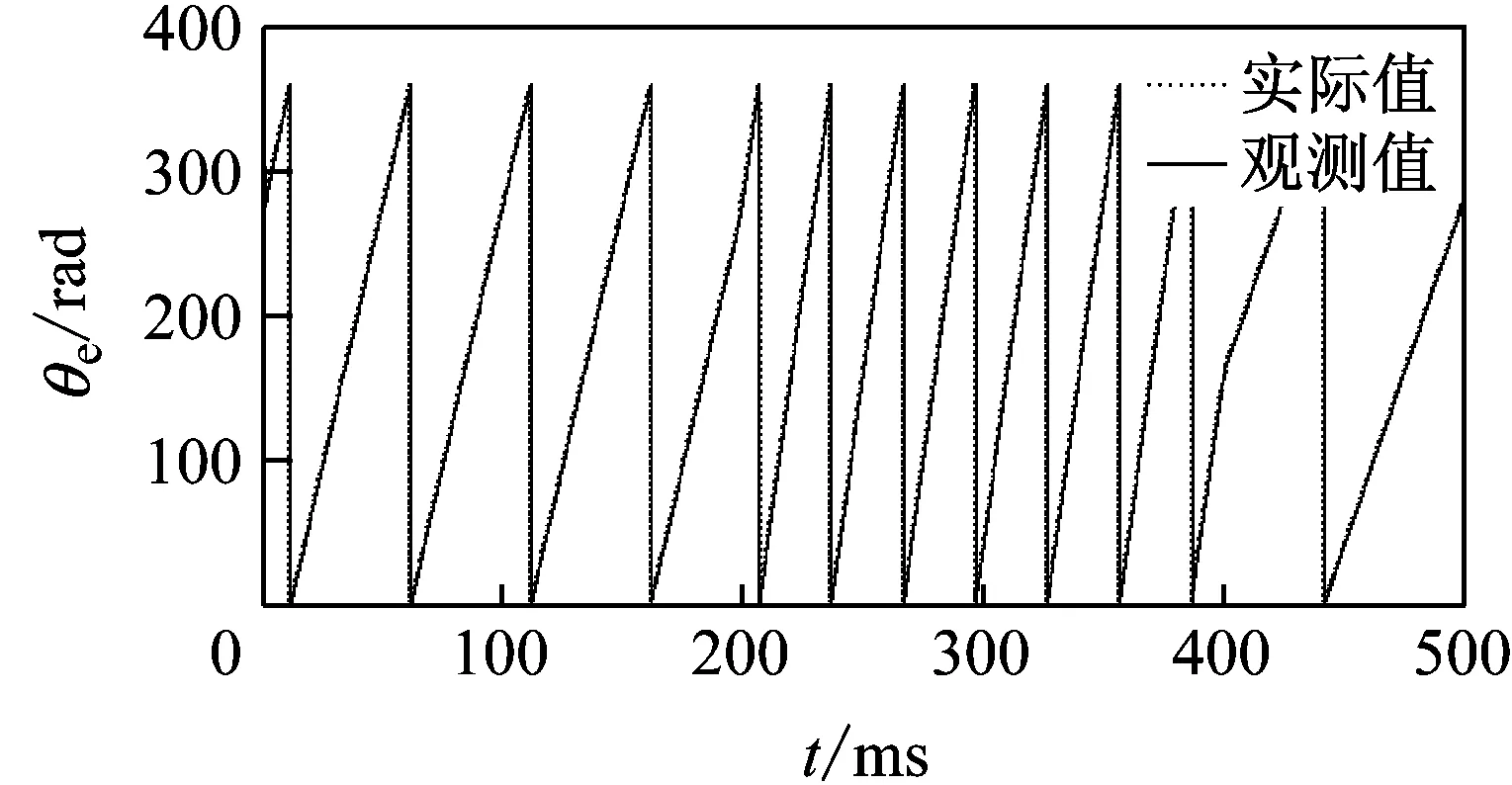
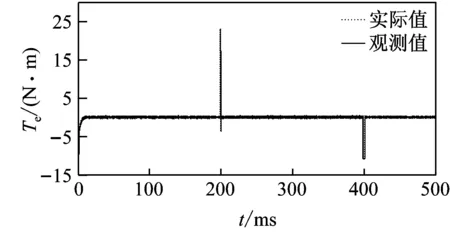
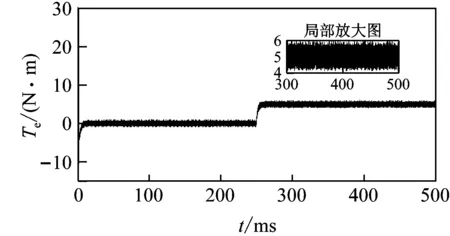
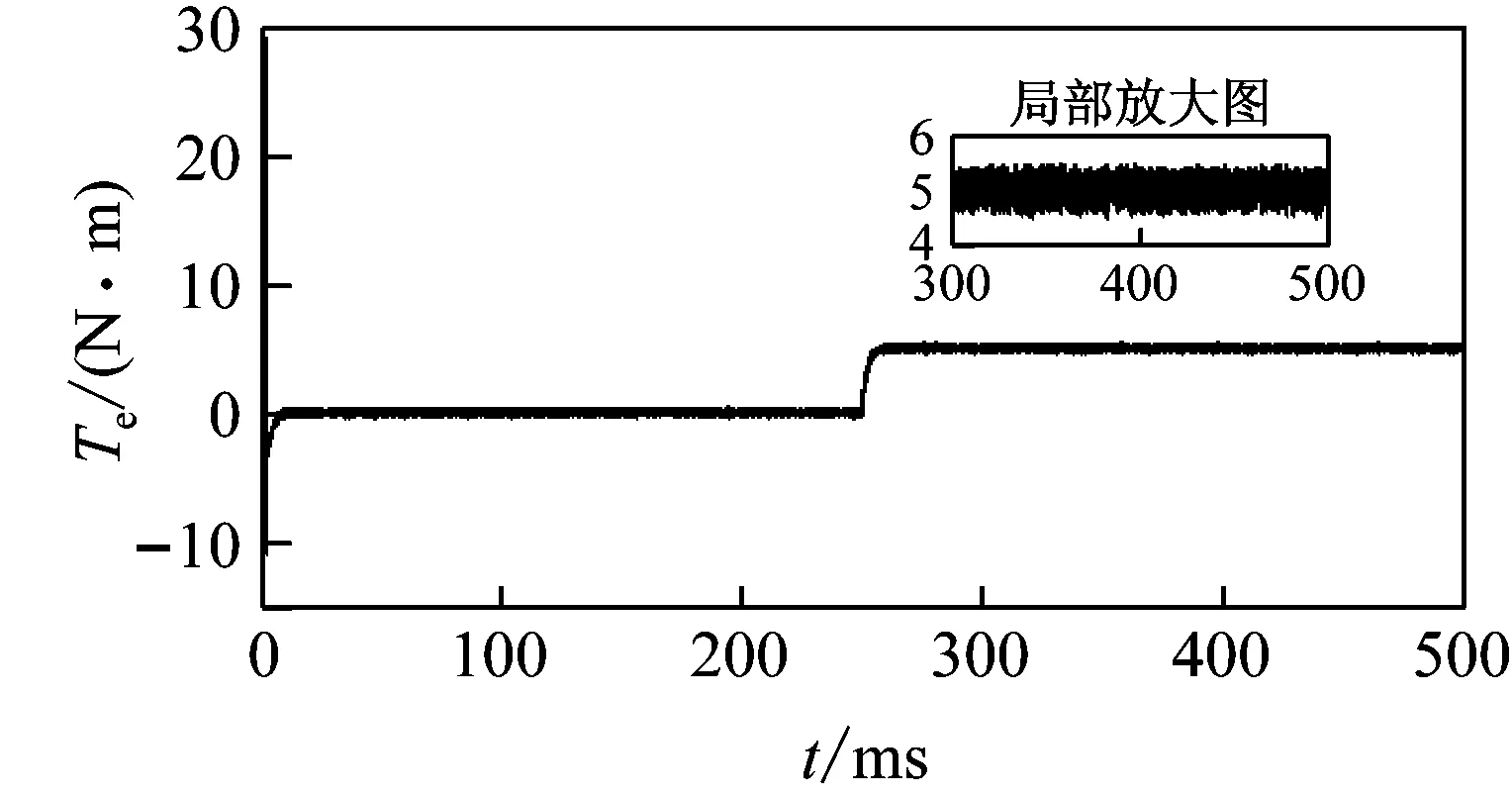
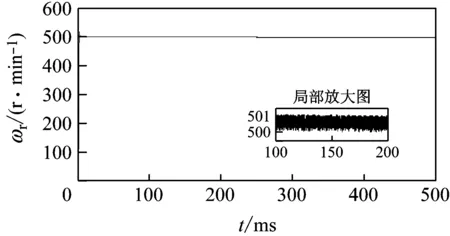
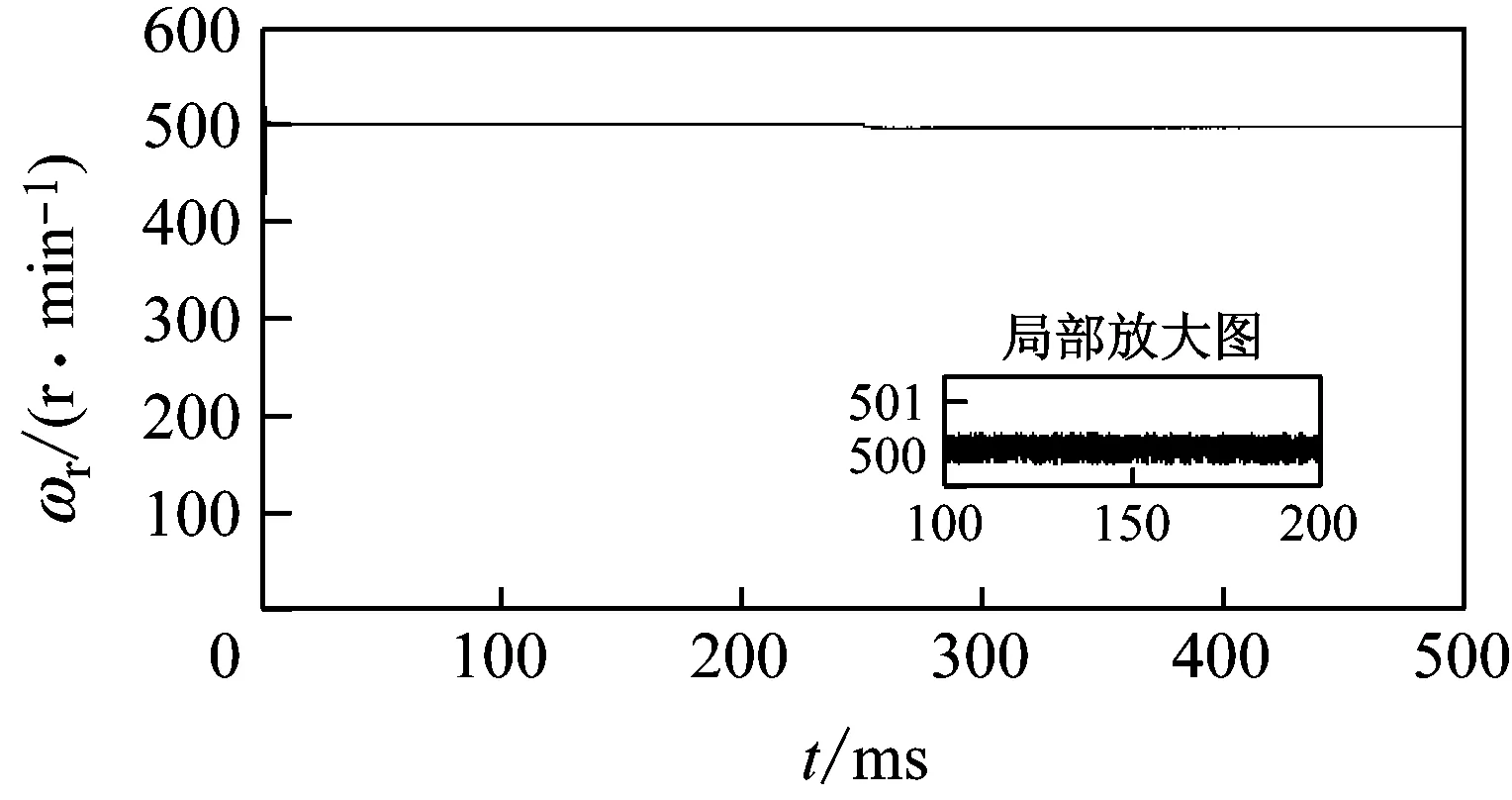
0 (25) |h(t,x1)| 設式(25)在任意范圍內都能滿足,則 (26) 因此,二階滑模控制器可轉化為如下反饋函數: (27) 二階滑模控制律設計中,Super-twisting算法只需要知道滑模量σ的信息,而不需要知道的信息,故Super-twisting算法可以消除一階滑模控制系統中的抖振問題,且控制器不受時間參數的影響,增強系統的魯棒性。 Super-twisting控制算法的控制律函數定義為[24] (28) 式中,KP、KI為待整定正增益,且滿足: (29) 因此,若式(23)滿足式(25),且式(28)滿足式(29),則認為Super-twisting控制系統能夠在有限時間內收斂。 3.2 Super-twisting控制器設計 由式(4)、(7)可得轉速微分方程為 (30) 由式(5)、(6)可得電流微分方程為 (31) 由定子磁鏈矢量坐標系可知,Ψs=Ψd,由式(5)可得定子磁鏈連續導函數為 (32) 式中,Rs、Ls、id、iq、ωr都為有界函數,故滿足式(25)中有限時間收斂條件。 因此,Super-twisting磁鏈控制器可設計為 (33) 同理,電動機電磁轉矩連續導函數為 (34) 將式(31)、(32)代入電磁轉矩二階連續導函數,可得 (35) 式中,pn、Ψf、J、B、ud、uq均為有界函數,故滿足式(25)中的收斂條件。 因此,Super-twisting轉矩控制器可設計為 (36) 為了進一步優化控制系統,減小系統抖動,故采用準滑動模態中的sigmoid(s)函數來代替符號 函數sgn(s),其表達式為[25] (37) 式中,a1為可調參數。 優化后的Super-twisting磁鏈控制器為 (38) 優化后的Super-twisting轉矩控制器為 (39) 根據式(38)、(39)可設計磁鏈、轉矩的Super-twisting控制器,設計框圖如圖1所示。Super-twisting控制器輸出電壓為ud、uq,空間矢量調制(Space Vector Modulation,SVM)模塊輸入電壓為uα、uβ,故需要在Super-twisting控制器中增加坐標變換模塊,將電壓轉換為uα、uβ。 圖1 Super-twisting控制器設計框圖 圖2 控制系統框圖 Fig.3 Block diagram of the control system 為驗證基于Super-twisting控制器的PMSM無傳感器直接轉矩控制的性能,本文利用Matlab/Simulink建立控制系統的仿真模型,運用S-function編寫EKF觀測器,其中Super-twisting控制器參數設置為KI=1;KP=220;sigmoid(s)函數中a1=20。仿真系統采用表貼式PMSM,其主要參數如表1所示。 表1 PMSM參數 仿真時,PMSM給定ωr=300 r/min啟動,至0.2 s時ωr增加至500 r/min,0.4s時ωr減小至200 r/min,TL=0 N·m,圖3給出了基于Super-twisting控制器的PMSM無傳感器直接轉矩控制仿真結果。 圖3(a)為系統空載啟動的轉速波形,當t=200 ms時ωr增加至500 r/min,當t=400 ms時減少ωr至200 r/min,系統觀測值與實際值有良好的跟隨性能。由圖3(b)可見,系統觀測θe與實際值基本一致,當t分別為200、400 ms時,給定轉速發生改變,實測θe與EKF觀測值基本一致,無明顯偏差。由圖3(c)可見,系統觀測Te與實測值基本一致,當ωr發生波動時,雖然Te也有波動,但能夠迅速回到給定值。仿真實驗表明,增加Super-twisting控制器的PMSM無傳感器直接轉矩控制,系統能夠實現對電動機ωr、θe、Te的精確、快速觀測。 為了進一步驗證基于Super-twisting控制器的PMSM無傳感器直接轉矩控制系統性能的優越性,PMSM給定啟動轉速ωr=500 r/min,當t=250 ms時,突加TL=5 N·m。圖4給出了基于PI控制器和基于Super-twisting控制器的PMSM無傳感器直接轉矩控制系統的仿真結果比較。 (a) 空載ωr波形 (b) θe波形 (c) Te波形 由圖4(a)、(b)可見,當t=250 ms時,增加TL,PI控制器和Super-twisting控制器下的控制系統都能在較快時間內使Te穩定,但在PI控制器下Te穩定后的波動范圍為4~6 N·m,而Super-twisting控制器下的Te波動范圍為4.6~5.3 N·m,這表明與PI控制器相比,Super-twisting控制器可以更有效減少EKF直接轉矩控制系統的轉矩脈動。 由圖4(c)、(d)可見,當t=250 ms時,增加TL后,PI控制器和Super-twisting控制器下的控制系統都可以在2.5 ms后達到穩定ωr,但在PI控制器轉速穩定后,其波動范圍為500.4~501.2 r/min,而Super-twisting控制器下的ωr波動范圍為500.1~500.4 r/min,這表明與PI控制器相比,Super-twisting控制器可以更有效抑制EKF直接轉矩控制系統的轉速波動,且對ωr的觀測更加精確。 (a) PI控制器下的電磁轉矩波形 (b)Super-twisting控制器下的電磁轉矩波形 (c)PI控制器下的轉速波形 (d)Super-twisting控制器下的轉速波形 Fig.4 Comparison of sensorless direct torque control of PMSM based on PID controller and a super-twisting controller 本文設計一種基于Super-twisting控制器的PMSM無傳感器直接轉矩控制,利用EKF觀測器實現了PMSM的無傳感器控制,避免了磁鏈計算的純積分環節,減少了轉矩脈動,實現了對電動機轉速、位置和磁鏈精確的觀測;同時,設計了Super-twisting控制器代替PI轉矩控制器和參考電壓矢量估算模塊,將準滑動模態中的sigmoid(s)函數來代替符號函數sgn(s),輸出到空間矢量調制模塊,進一步減少了控制系統轉矩脈動、提高轉速觀測精度降低了系統復雜性。仿真實驗表明,Super-twisting控制器可以有效減少EKF直接轉矩控制系統的轉矩脈動,提高系統對電動機轉速觀測的精度,且能夠有效地抑制轉速波動,提高了控制系統整體性能。 [1] ZHANG Yongchang, ZHU Jianguo. Direct torque control of permanent magnet synchronous motor with reduced torque ripple and commutation frequency [J]. IEEE Transactions on Power Electronics, 2011, 26(1):235-248. [2] ZHANG Yongchang,ZHU Jianguo, ZHAO Zhengming, et al.An improved direct torque control for three-level inverter-fed induction motor sensorlessdrive [J]. IEEE Transactions on Power Electronics, 2012, 27(3):1502-1513. [3] BEERTEN J, VERVECKKEN J, DRIESEN J. Predictive direct torque control for flux and torque ripple reduction [J]. IEEE Transactions on Industrial Electronics, 2010, 57(1):404-412. [4] 王磊, 王京, 張勇軍. 基于滑模變結構的異步電機直接轉矩控制研究 [J]. 電力電子技術, 2010, 44(1):44-45,51. [5] 李政學, 張永昌, 李正熙,等. 基于簡單占空比調節的異步電機直接轉矩控制 [J]. 電工技術學報, 2015, 30(1):72-80. [6] 范文進, 鄭瓊林, 楊中平,等. 一種中高速區轉矩優化的異步電機直接轉矩控制算法 [J]. 中國電機工程學報, 2016, 36(1):240-249. [7] 徐進, 陳珊杰. EKF直接轉矩控制的感應電機狀態觀測器 [J]. 高電壓技術, 2007, 33(5):127-130. [8] 徐艷平, 雷亞洲, 沙登卓,等. 矢量細分占空比控制的改進直接轉矩控制方法 [J]. 電力電子技術, 2016, 50(2):71-73. [9] ESSAADI M, KHAFALLAH M, SAAD A, et al. A comparative analysis between conventional and new twelve sectors direct torque control strategies of induction machine using a multi levelinverter [J]. Molecular Crystals and Liquid Crystals, 2016, 628(1):180-187. [10] LAHCEN O, MOHAMED K, MOUNA E, et al. An implementation of a twelve sectors direct torque control strategy of induction machine using DSPACE TMS 320F2812 [J]. Communications on Applied Electronics, 2015, 36(1):407-411. [11] 史曉永,王步來,陳雪琴,等. 基于SVPWM 的永磁同步電機直接轉矩控制系統的建模與仿真 [J]. 通信電源技術,2014,31(3):25-26,29. [12] SINGH J, SINGH B, SINGH S P, et al. Investigation of performance parameters of PMSM drives using DTC-SVPWM technique [C]// 2012 Students Conference on IEEE Engineering and Systems (SCES). Uttar Pradesh, India: IEEE, 2012:1-6. [13] VENKATARAMANA N N, PANDA A, SINGH S P. A three-level fuzzy-2 DTC of induction motor drive using SVPWM [J]. IEEE Transactions on Industrial Electronics, 2015, 63(3):1467-1479. [14] GUPTA N P, GUPTA P. Performance analysis of direct torque control of PMSM drive using SVPWM-inverter [C]// IEEE 5th India International Conference on Power Electronics. Delhi, India:IEEE, 2012:1-6. [15] 賈洪平, 孫丹, 賀益康. 基于滑模變結構的永磁同步電機直接轉矩控制 [J]. 中國電機工程學報, 2006, 26(20):134-138. [16] ZHAO Shuai, YU Haisheng, YU Jinpeng, et al. Induction motor DTC based on adaptive SMC and fuzzy control [C]// 27th Chinese Control and Decision Conference. Qingdao: IEEE, 2015:4474-4479. [17] FU Hong, TIAN Guangyu, CHEN Yaobin, et al. Sliding mode-based DTC-SVM control of permanent magnet synchronous motors for plug-in hybrid electric vehicles [C]// 2009 IEEE Vehicle Power and Propulsion Conference. Dearborn, MI, USA: IEEE:500-505. [18] 向國菲, 佃松宜, 蒲明. 基于EKF永磁同步電機無傳感直接轉矩控制研究 [J]. 控制工程, 2015, 22(3):369-374. [19] ALSOFYANI I M, IDRIS N R N. Lookup-table-based DTC of induction machines with improved flux regulation and extended Kalman filter state estimator at low-speed operation [J]. IEEE Transactions on Industrial Informatics, 2016, 12(4):1412-1425. [20] 劉英培, 萬健如, 梁鵬飛. 基于擴展卡爾曼濾波器和空間電壓矢量調制的永磁同步電機直接轉矩控制 [J]. 中國電機工程學報, 2009, 29(27):67-74. [21] SEILMEIER M, PIEPENBREIER B. Sensorless control of PMSM for the whole speed range using two-degree-of-freedom current control and HF test current injection for low-speed range [J]. IEEE Transactions on Power Electronics, 2015, 30(8):4394-4403. [22] 荊鍇, 孫鶴旭, 董硯,等. 以電流矢量為目標的永磁同步電機定子電流動態預測 [J]. 電工技術學報, 2016,31(2):47-55. [23] HUANG Rui, HU Haiyan, ZHAO Yinghui. Single-input/single-output adaptive flutter suppression of a three-dimensional aeroelastic system [J]. Journal of Guidance, Control & Dynamics, 2015, 35(2):659-665. [24] MORENO J A, OSORIO M. Strict Lyapunov functions for the super-twisting algorithm [J]. IEEE Transactions on Automatic Control, 2012, 57(4):1035-1040. [25] GOMAR S, MIRHASSANI M, AHMADI M. Precise digital implementations of hyperbolic tanh and sigmoid function [C]// 2016 Asilomar Conference on Signals, Systems and Computers. Pacific Grove, CA, USA: IEEE, 2016:1586-1589. Sensorless Direct Torque Control of Permanent Magnet Synchronous Motor Using a Super-twisting Controller YANG Xin, CHI Changchun, GEN Jinzhong, LI Mingming (School of Electric Engineer, Shanghai Dianji University, Shanghai 201306, China) Parameters of permanent magnet synchronous motor (PMSM) are susceptible to random and nonlinear noise disturbances. In direct torque control, observation accuracy is poor because pure integral is generally used in the calculation of stator flux, leading to torque ripple and flux pulses. To solve the problem, an extended Kalman filter (EKF) observer is used to make accurate observation of speed, position and flux of the PMSM. Meanwhile, as the PI controller is sensitive to changes in the motor parameters, a super-twisting controller is designed instead of a torque PI controller and a reference voltage vector estimation module. The function sigmoid(s) in a quasi-sliding mode is used to replace the symbol function sgn(s), improving robustness and reducing complexity of the system. Simulation results show that the EKF observer can accurately observe the speed, position and flux of the motor. The super-twisting controller can reduce torque ripples in the control system, and improve observation accuracy of the speed. super-twisting controller; extended Kalman filter(EKF); permanent magnet synchronous motor(PMSM); direct torque control 2017 -03 -23 上海市閔行區科技項目資助(2014MH134) 楊 鑫(1990-),男,碩士生,主要研究方向為電機與電器,E-mail:453143287@qq.com 2095 - 0020(2017)03 -0139 - 08 TM 341; TM 351 A



4 仿真及結果分析
5 結 語