全液壓掃路機的DA泵控行走液壓系統
2017-08-08 05:18:57劉伯祥李建華黃興華
上海電機學院學報 2017年3期
劉伯祥, 劉 振, 劉 堅, 李建華, 黃興華
(1.中聯重科股份有限公司 環境產業公司,長沙 410013; 2.上海電機學院 機械學院,上海 201306)
?
全液壓掃路機的DA泵控行走液壓系統
劉伯祥1, 劉 振1, 劉 堅1, 李建華1, 黃興華2
(1.中聯重科股份有限公司 環境產業公司,長沙 410013; 2.上海電機學院 機械學院,上海 201306)
介紹了全液壓小型掃路機的行走液壓系統的工作原理和DA閥的結構,基于AMEsim軟件建立仿真模型,通過仿真與實驗測試該液壓系統和DA閥的動態特性。結果表明:掃路機DA泵控行走液壓系統的仿真結果與試驗結果較吻合,系統的AMESim模型正確可用,該行走系統可使發動機功率自適應外界負載的變化,全液壓小型掃路機具備良好的控制性能。
全液壓小型掃路機; DA閥; 功率匹配; 行走液壓系統; AMEsim
全液壓小型掃路機主要適用于市內街道、公園、小區、廣場、倉庫等通道狹小,對作業噪聲和排放控制較嚴的場所[1]。掃路機作業時間長且作業過程中穿梭進退、曲折迂回,對調速、換向、低速穩定行駛性能、操作舒適性要求比較高;同時,掃路機需用一臺發動機驅動行走、轉向和所有工作機構,因此,整機液壓元件需布局方便、結構緊湊。現有的行走傳動方式主要有純機械傳動、液力傳動、電力傳動、靜壓傳動4種[2-3]。其中,純機械傳動方式效率高,但調速方式復雜且不線性,元件布局受限;液力傳動方式能無級調速,但變矩范圍小,傳動效率低,逆向工作能力差,且速度隨負載波動大;電力傳動布局靈活且調節性能好,但其功率密度小、系統發熱量大;靜壓傳動方式功率密度大,元件布局靈活,無級調速范圍廣,能實現方向、速度、力矩的精準控制[2-3]。綜合考慮,靜液壓行走系統更適合全液壓小型掃路機。
本文結合AMEsim軟件與掃路機行走液壓系統原理圖、DA閥的結構,建立了系統仿真模型,仿真分析與試驗測試了該系統的動態特性。結果表明:采用該行走液壓系統的掃路機具備良好的行走特性,掃路機發動機功率可以得到合理利用且能防過載。
1 全液壓小型掃路機的行走液壓系統
1.1 系統原理
全液壓小型掃路機的行走液壓系統是由主變量泵、高壓溢流閥、DA閥、補油單向閥、補油泵、液壓電動機等組成。圖1為全液壓小型掃路機行走液壓系統原理圖。
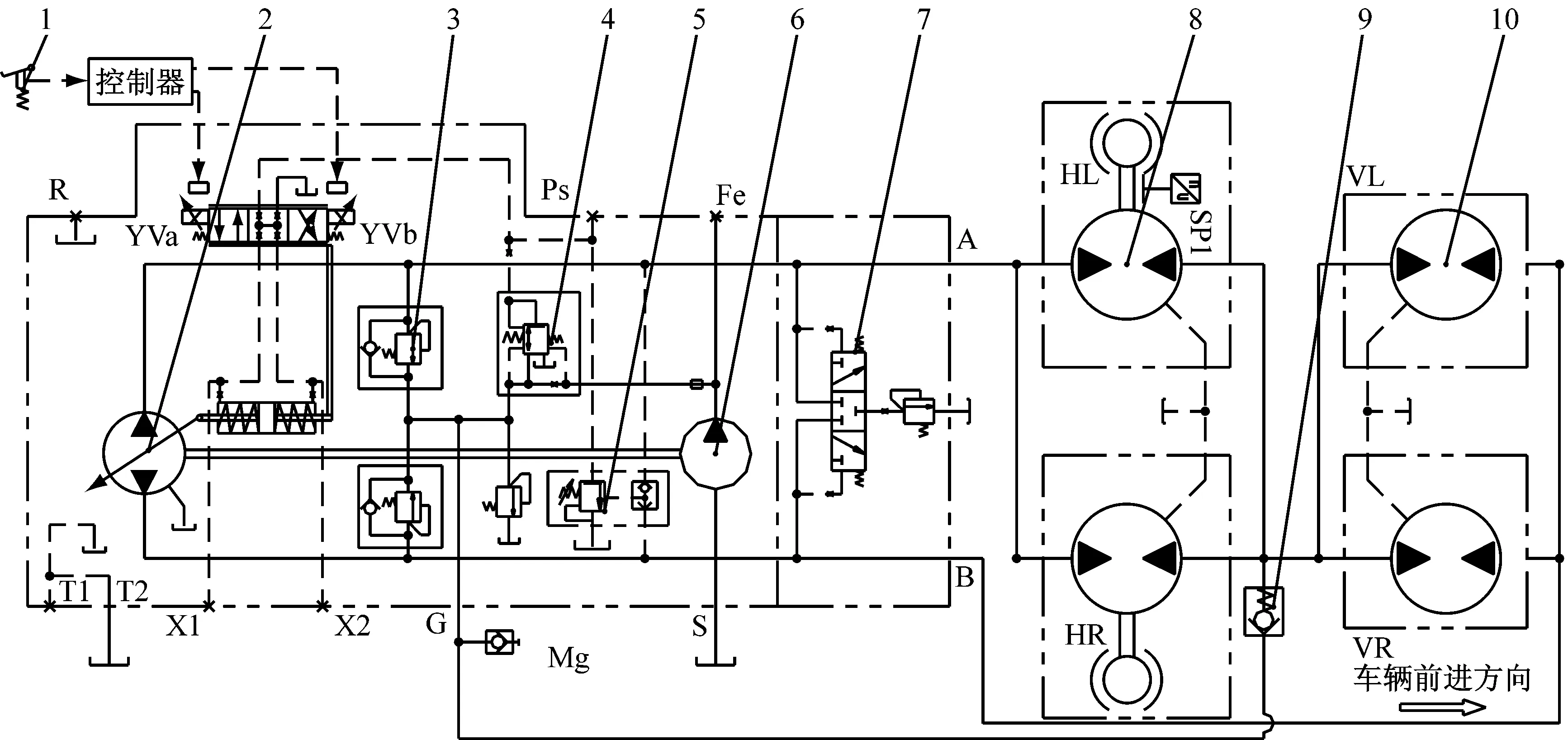
1-腳踏板;2-主變量泵;3-高壓溢流閥;4-DA閥;5-壓力切斷閥;6-補油泵;7-沖洗閥;
當掃路機處于轉場模式時(高速行走不執行其他工作),腳踏板的輸出信號只控制發動機轉速,電子控制單位(Electronic Control Unit, ECU)輸出最大控制電流給主變量泵的電比例閥,此時,電比例閥開口保持最大;當發動機怠速時,補油泵的油液經過DA閥全部流回油箱,無控制油進入電比例閥和變量缸,此時,變量泵的理論排量為零,掃路機靜止不動。緩慢踩下腳踏板,當發動機轉速增加至一定轉速后,補油泵的部分油液經過DA閥流入主變量泵的電比例閥和變量缸,此時,主變量泵的排量增加,其輸出壓力油驅動液壓電動機旋轉。主變量泵的流量隨發動機轉速產生連續變化,從而實現行走的無級變速;此外,可通過控制主變量泵的斜盤過零點來實現液壓電動機旋轉方向的改變。補油泵既提供壓力油給主變量泵的變量機構,又補償電動機、主變量泵的容積損失,高壓溢流閥限制系統的壓力沖擊[4-5]。
1.2 DA閥工作原理
速度敏感控制器又稱DA閥,其結構原理如圖2所示。DA閥由調節螺釘1、彈簧2、閥芯3、閥座4、阻尼片5等零件組成[6-8]。
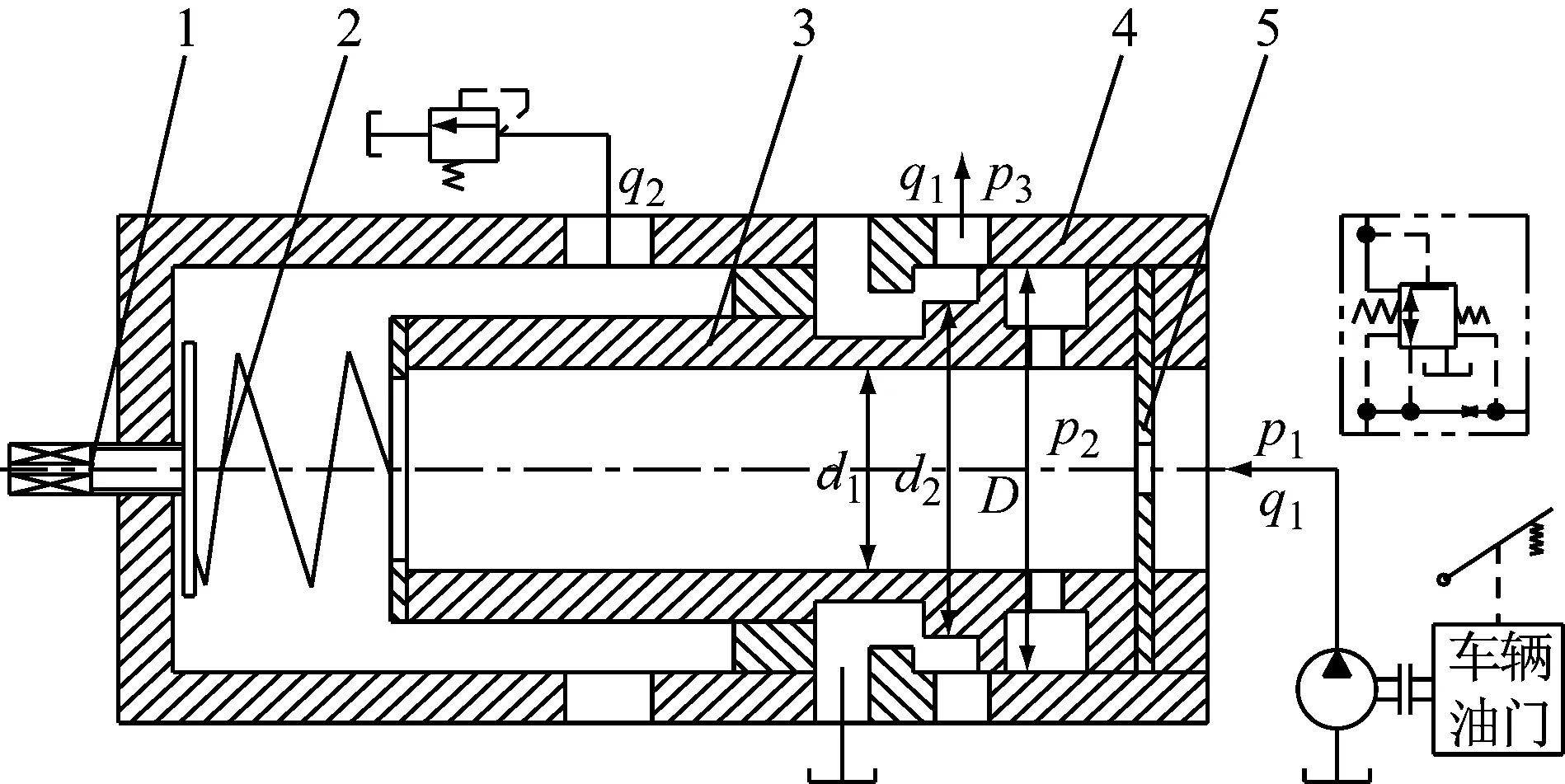
圖2 DA閥的結構原理圖
輔助泵的流量q1流進阻尼片5,在其前、后產生壓差Δp,阻尼片前、后壓力為p1、p2。該壓差Δp作用在閥芯3上,當壓差Δp增大到一定值后,推動閥芯3克服彈簧2的反作用力Ft向左移動,當閥芯3的行程x超過遮蓋量后,控制油路打開,控制壓力油進入主變量泵的變量機構,進而改變主變量泵的輸出流量。同時,控制壓力油作用在閥芯3的環形面積上,產生方向向右的反作用力,與由Δp產生的向左推動力相抗衡,從而使閥芯3穩定在平衡位置。閥芯3工作時的平衡方程為[9-10]
(1)
式中,p3為控制油壓力;D為閥座4的內圓直徑;d2為閥芯3階梯口的外圓直徑。
當DA閥的阻尼片5選定后,Δp主要受輔助泵流量q1的影響,即
(2)
式中,ρ為油液的密度;d為阻尼片薄壁孔的直徑;Cq1為阻尼片薄壁孔流量系數。
輔助定量泵的流量q1與掃路車發動機轉速n成正比,為
q1=nVp/1 000
(3)
式中,Vp為泵的排量。
控制壓力油的壓力值p3與閥芯3可變節流口的開度x、控制壓力油的流量q3有關[11-12],即
(4)
式中,Cq2為閥芯可變節流孔流量系數。
綜上所述,深踩油門,發動機轉速n升高,q1增大,Δp增大,推動力增大,閥芯3左移,其可變節流口變大,控制壓力p3增大,彈簧2和控制壓力油的反作用力增大,直至閥芯3恢復平衡,主變量泵排量與輸出流量增大;松開油門,發動機轉速n降低,q1減小,Δp減小,推動力減小,閥芯3右移,其可變節流口變小,控制壓力p3減小,彈簧2和控制壓力油的反作用力減小,直至閥芯2恢復平衡,主變量泵排量與輸出流量減小。改變彈簧2的預壓縮量,可改變DA閥限矩特性曲線起點值大小;改變阻尼片薄壁小孔的孔徑可整體降低或升高DA閥限矩特性曲線。
2 基于AMEsim軟件的行走系統仿真
基于全液壓掃路機行走液壓系統原理圖和式(1)~(4),建立該系統的AMEsim模型,如圖3所示。
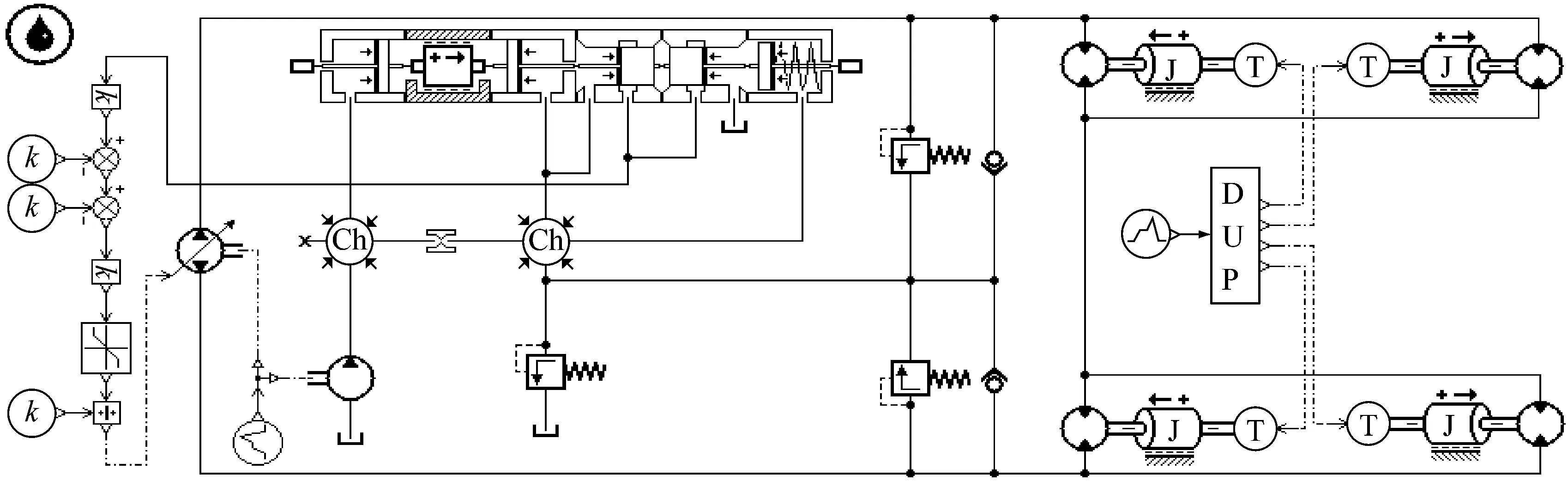
圖3 全液壓小型掃路機行走液壓系統AMEsim模型
圖中,發動機為功率30 kW的柴油機,主變量泵為軸向柱塞變量泵(EP電控帶DA閥),馬達為徑向內曲線電動機。
該模型主要由發動機模塊、DA閥模塊、主變量泵模塊、補油泵模塊、行走電動機及負載模塊組成[13-15]。為了降低仿真建模的難度與可靠性,做以下優化:① 省略主變量泵的沖洗閥模塊;② 忽略油液溫度、管路彈性模量對系統的影響;③ 主變量泵的變量機構由數學模塊進行簡化處理;④ 主變量泵與行走電動機的容積效率固定,不考慮其他因素的影響。
簡化系統,用一個變量信號模塊模擬發動機轉速的變化,負載模塊輸出設置為0,仿真分析控制油壓力pPs隨發動機轉速變化的特性,其仿真特性曲線如圖4所示。
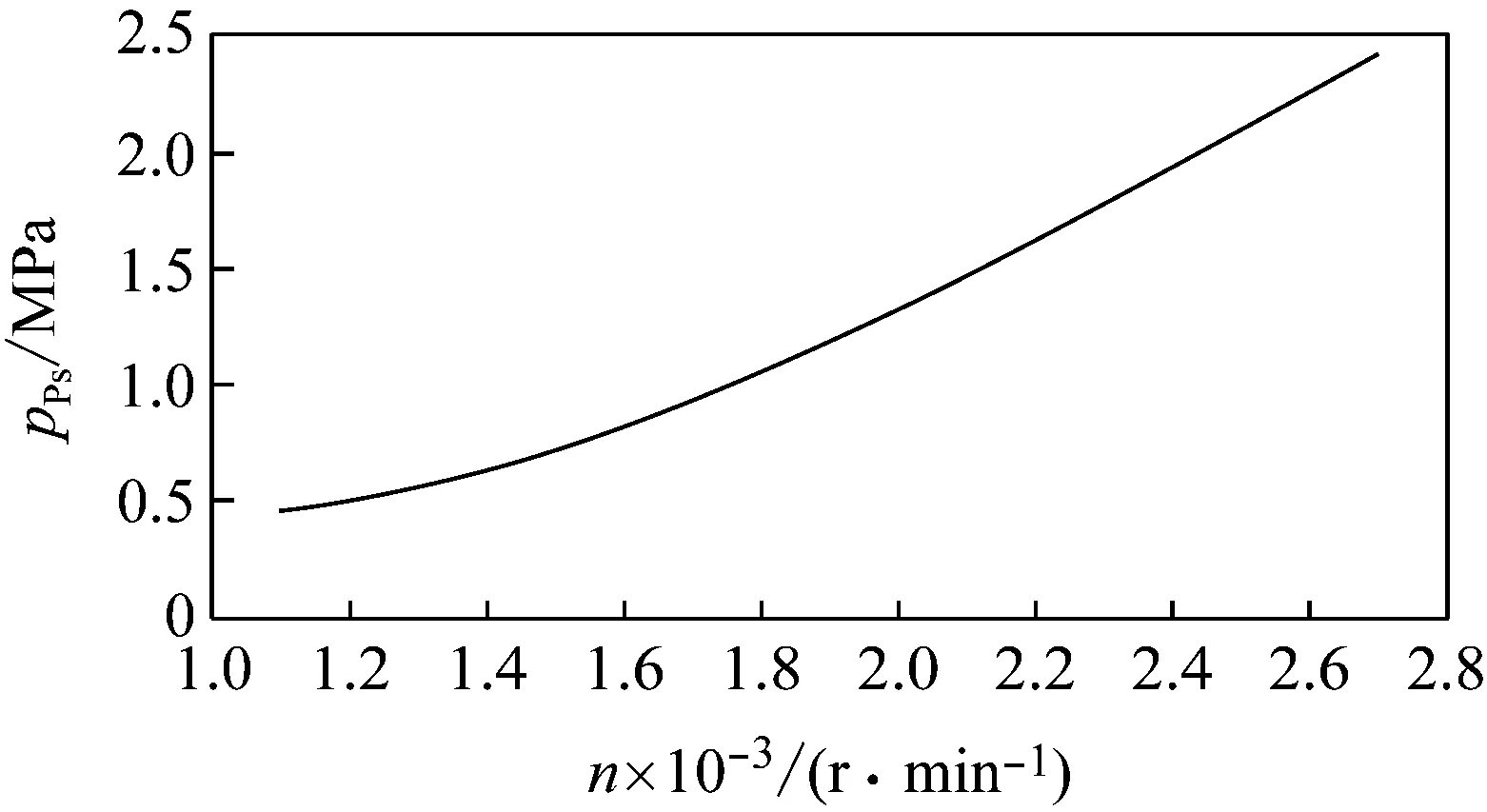
圖4 DA閥pPs-n的仿真曲線
將負載模塊輸出設置為一固定值,仿真分析掃路機的行走特性,其仿真特性曲線如圖5所示。圖中,v為車速;pMa、pPs為主變量泵Ma和Ps口的壓力。
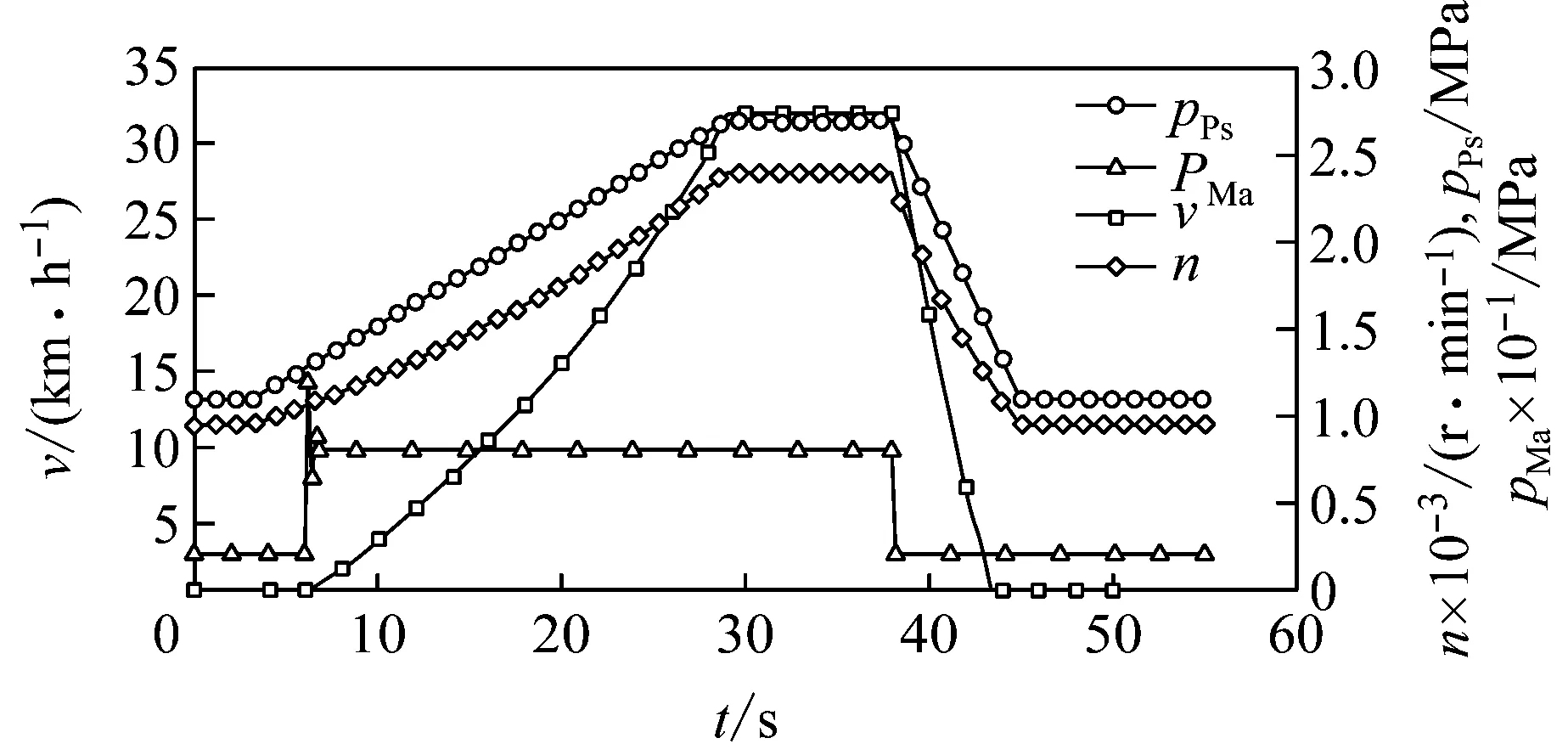
圖5 掃路機行走液壓系統的仿真曲線
3 樣機的試驗論證及對比分析
基于全液壓小型掃路機樣機,進行DA閥性能測試與行走性能測試,記錄并分析掃路機DA泵控靜液壓驅動行走系統的動態特性。試驗測試時,上位機通過CAN總線直接從樣機ECU中讀取發動機轉速與主泵的脈沖寬度調制(Pulse Width Modulation, PMW)電流信號,其余壓力與轉速信號通過數據采集儀采集后再傳輸給上位機,試驗測試設備信息如表1所示。
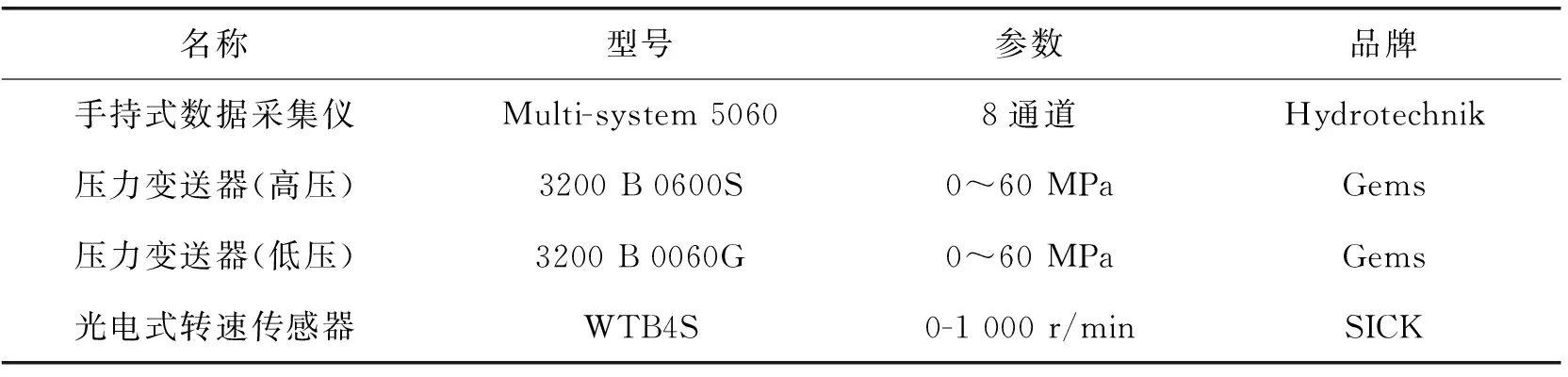
表1 試驗測試設備信息
3.1 DA閥性能試驗
調節好DA閥的彈簧壓縮量,選擇合適的節流孔板,測量得到DA閥Ps口控制壓力隨發動機轉速變化的曲線如圖6所示。
對比圖4、6可知,仿真曲線與實測曲線的趨勢基本相同,Ps口壓力與發動機轉速近似成二次方程關系;但因仿真模型中主變量泵的殼體壓力油直接回油箱,而試驗樣車主變量泵的殼體壓力為0.2 MPa,故仿真曲線比試驗曲線下降約80 kPa,但兩曲線的宏觀形狀一致性較好,進而驗證了DA閥仿真模型的準確性,這有助于其他機型DA閥參數的預選。
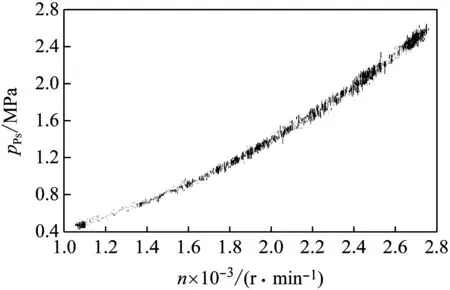
圖6 DA閥Ps壓力-發動機轉速的實測特性曲線
3.2 行走試驗
調節好DA閥后,ECU輸出最大PMWI電流信號給主變量泵的電比例閥,操作掃路機進行行走試驗(慢速起步、快速停車),測量發動機轉速n、車速v、主變量泵接收到的PMWI電流信號I以及主變量泵Ma、Mb、Ps、X1、X2、G口壓力pMa、pMb、pPs、pX1、pX2、pG,結果如圖7所示。
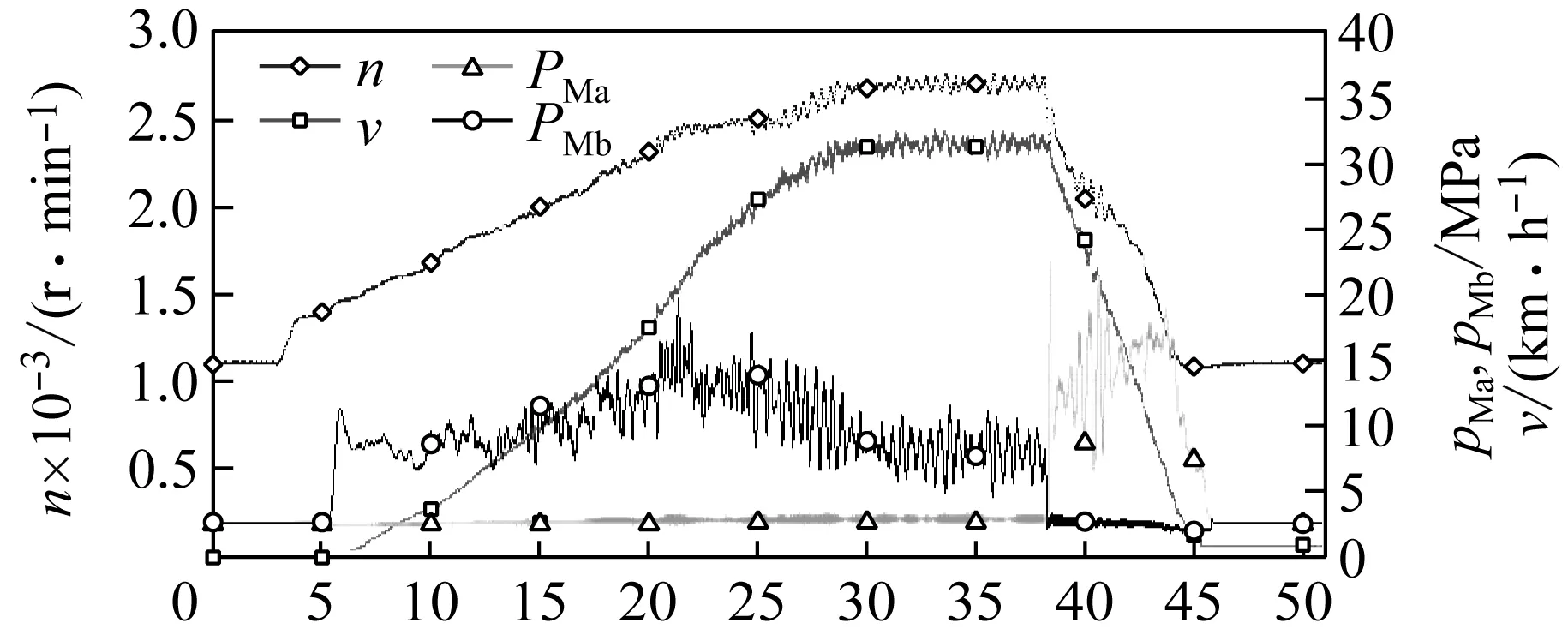
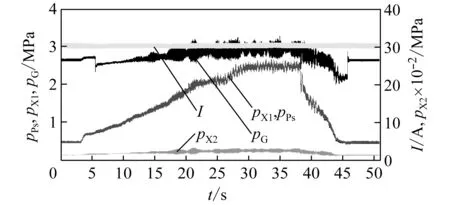
圖7 掃路機靜液壓行走系統的實測特性曲線
由圖7可知,ECU輸出1.150 A電流給主變量泵的電比例閥。當t=0~3 s時,踏板無信號,n=1 100 r/min為怠速,pPs=0.5 MPa,v= 0 km/h;當t= 3~6 s時,n隨油門踏板信號緩慢增加到1 450 r/min,pPs從0.5 MPa增加到0.75 MPa,但pPs<0.75 MPa不足以使主變量泵的變量機構變量,車速v仍保持為0 km/h;當t= 6~29 s時,n從1 450 r/min增加到2 700 r/min,pPs從0.75 MPa增加到2.5 MPa,主變量泵的變量機構開始工作,v也從0 km/h加速到31 km/h;當t=29~38 s時,n維持2 700 r/min不變,pPs也維持在2.5 MPa不變,主變量泵排量保持最大,v維持31 km/h不變;當t=38~45 s時,n從2 700 r/min快速降低到怠速,pPs從2.5 MPa減小到0.5 MPa,主變量泵的排量也逐漸從最大降低到0(理論),同樣v也從31 km/h降低到0 km/h;當t=45~51 s時,n=1 100 r/min為怠速,pPs維持在0.5 MPa左右,掃路機靜止不動。由圖7可見,n隨油門踏板信號成正比變化,pPs隨n增加而增加,進而控制主變量泵排量隨n變化,最終引起掃路機v隨n自適應變化。
對比圖5與圖7可知,仿真曲線與實測曲線的趨勢基本相同。受駕駛員操作油門踏板穩定性的影響,實測曲線的局部出現波動性變化;同時,由于實驗場地的平整度一直較差,當t=17~27 s時,負載相對其他時段整體增大;但兩曲線的宏觀形狀一致性較好,驗證了該行走液壓系統仿真模型的準確性,可用該模型進一步仿真分析掃路機行走制動力矩、沖洗閥流量的動態響應。
4 結 論
本文介紹了全液壓小型掃路機的行走液壓系統的工作原理和DA閥的結構,基于AMEsim軟件建模并經過仿真與試驗測試了該系統和DA閥的動態特性。由仿真與試驗結果分析可得到以下結論:
(1) 全液壓小型掃路機的DA泵控閉式行走液壓系統的AMEsim模型基本正確,可用于分析和優化掃路機行走系統的動態特性;
(2) 當采用DA泵控行走液壓系統時,全液壓小型掃路機的車速v可隨發動機轉速n自適應變化,具備良好的控制性能;
(3) 當掃路機行駛驅動阻力增加時,發動機轉速下降,主泵排量下降,可避免發動機因負載過大而熄火;當行駛驅動阻力減小時,發動機轉速升高,主泵排量上升,可避免發動機的功率浪費。全液壓小掃路機采用DA泵控行走液壓系統可以使發動機功率自適應外界負荷的變化,功率得到合理利用并不過載。
[1] 劉伯祥. 中聯重科SHZ22型全液壓掃路機 [J].筑路機械與施工機械化,2008(5):32.
[2] 王意.車輛與行走機械的靜液壓驅動 [M]. 北京:化學工業出版社,2014:10-22.
[3] 王巖,張永龍,秦緒情,等.車輛靜液傳動液壓系統研究現狀及發展趨勢 [J].機床與液壓,2015,43(13):149-155.
[4] 姜皓. 靜液壓傳動式車輛驅動系統的研究 [D].北京:北京理工大學,2016:18.
[5] 趙金光,劉彬,陳巖,等. 移動機械發動機與靜液壓系統優化控制研究 [J].液壓氣動與密封,2016(11):71-75.
[6] 卞永明,寧曉賢,趙芳偉. DA-HA閉式控制系統在工程機械中的應用 [J].中國工程機械學報,2012,10(1):58-63.
[7] 張久林.工程機械液壓行走系統的設計及理論研究[D].上海:同濟大學,2007:73.
[8] 孫崇智.帶DA閥的AV4G軸向柱塞泵的控制原理分析 [J].甘肅科技,2014,30(24):66-69.
[9] 吳曉明,高殿榮.液壓變量泵(馬達)變量調節原理與應用 [M].北京:化學工業出版社,2012: 166.
[10] 馬登成,馬登慧,蔣小明,等.基于液壓泵DA與馬達HA聯合控制的工程機械波動載荷抑制及節能 [J].中國公路學報,2014,27(1):120-126.
[11] 王積偉,章宏甲,黃誼. 液壓傳動 [M].北京:機械工業出版社,2007: 42-49.
[12] 梁貴萍,何曉暉.DA閥的控制原理分析與應用 [J].貴陽學院學報(自然科學版),2009,4(4):11-12,25.
[13] 付永領,祁曉野.LMS Imagine.Lab AMESim系統建模和仿真參考手冊 [M].北京:北京航空大學出版社,2012: 32-59.
[14] 元萬榮.滑移裝載機閉式行走系統研究 [D].長春:吉林大學,2013: 39-48.
[15] 李倩雯.自動裝載移動式攪拌站機液復合傳動系統研究 [D]. 長春:吉林大學,2015: 56-58.
DA Travel Hydraulic System of Miniature Full Hydraulic Sweeper
LIU Boxiang1, LIU Zhen1, LIU Jian1, LI Jianhua1, HUANG Xinghua2
(1. Zoomlion Environmental Industry Branch, Zoomlion Heavy Industry Science & Technology Co., Ltd., Changsha 410013,China;2. School of Mechanical Engineering, Shanghai Dianji University, Shanghai 201306, China)
The working principle of the travel hydraulic system of a miniature full hydraulic sweeper and the structure of its DA valve is introduced. The hydrostatic transmission system is modeled with AMEsim. Dynamic characteristics of the transmission system and the DA valve are tested by simulation and experiment. The experiments and simulation results agree with each other, showing that the simulation model is correct. With the travel hydraulic system, the engine power automatically suits the load changes. Therefore, the control performance of the miniature full hydraulic sweeper is satisfactory.
miniature full hydraulic sweeper; DA valve; power match; hydrostatic transmission system; AMEsim
2017 -04 -16
上海市科技攻關計劃項目資助(12231202502)
劉伯祥(1968-),男,工程師,主要研究方向為流體傳動與控制,E-mail:1721950113@qq.com
李建華(1959-),男,高級工程師,主要研究方向為清掃設備,E-mail:ljh2jv22@sina.cn
2095 - 0020(2017)03 -0175 - 06
U 469.691
A
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年2期)2014-02-27 12:10:15