一種規(guī)模化養(yǎng)殖場喂料系統(tǒng)的設(shè)計
2017-08-09 15:16:04陳亮安宇徐善崗
科技與創(chuàng)新 2017年14期
陳亮,安宇,徐善崗
(淮安信息職業(yè)技術(shù)學(xué)院,江蘇淮安223003)
一種規(guī)模化養(yǎng)殖場喂料系統(tǒng)的設(shè)計
陳亮,安宇,徐善崗
(淮安信息職業(yè)技術(shù)學(xué)院,江蘇淮安223003)
提出了一種適用于生豬規(guī)模化養(yǎng)殖的智能喂料系統(tǒng)設(shè)計方法,能夠解決當(dāng)前普遍存在的喂料工作繁雜、飼喂不科學(xué)、料量不精準(zhǔn)等問題,并能夠極大地減少飼料污染與變質(zhì)的現(xiàn)象,降低生豬患病的概率。該系統(tǒng)采用上位機+下位機的模式,通過計算機、單片機、執(zhí)行機構(gòu)與檢測機構(gòu)搭建組合,利用分布式控制技術(shù)、虛擬儀器技術(shù)、數(shù)據(jù)遙測技術(shù)等,實現(xiàn)養(yǎng)殖場喂料系統(tǒng)的智能化控制,具有計量準(zhǔn)確、控制靈活、功能豐富的特點,適用于規(guī)模化養(yǎng)殖,擁有良好市場前景。
規(guī)模化養(yǎng)殖;喂料系統(tǒng);分布式控制;虛擬儀器
隨著經(jīng)濟的發(fā)展和社會的進(jìn)步,肉類在人們每天的飲食中所占比例越來越大,養(yǎng)殖場成為養(yǎng)殖業(yè)發(fā)展的趨勢。隨著養(yǎng)殖場規(guī)模越來越大,人工喂料方式一方面增加了飼養(yǎng)員人數(shù),養(yǎng)殖場的運行成本高;另一方面,不能確保喂料量的合適,容易造成飼料積聚,腐敗變質(zhì),影響牲畜的健康,不利于牲畜的生長。
本文提出一種規(guī)模化養(yǎng)殖場智能喂料系統(tǒng),可以解決現(xiàn)有喂食控制系統(tǒng)采用大量電子元件來采集信息,導(dǎo)致系統(tǒng)的故障率高、系統(tǒng)維護(hù)費用高、難以推廣等問題。本設(shè)計由計算機與數(shù)據(jù)采集模塊構(gòu)成虛擬儀器系統(tǒng),控制智能量筒設(shè)定給料量,并通過通信實現(xiàn)遠(yuǎn)程控制,整體設(shè)計如圖1所示。
1 硬件部分設(shè)計
系統(tǒng)由儲料斗、循環(huán)輸送管道、限料斗等組成。上位機通過485總線,控制單片機控制限料筒中的套筒位置,電機驅(qū)動飼料在管道中傳輸,根據(jù)設(shè)置實現(xiàn)送料數(shù)量。
本設(shè)計采用PC計算機作為上位機,AT89S51作為下位機,兩者通過RS485/232通信。
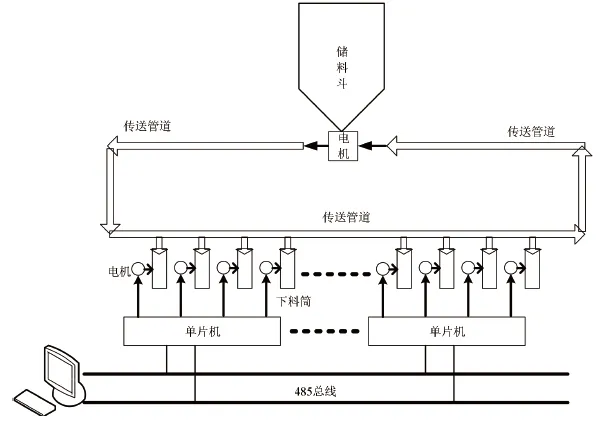
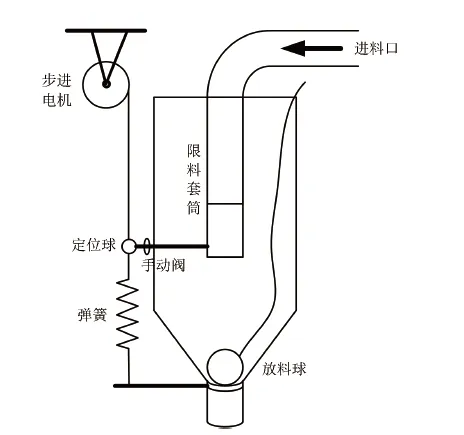
圖1 規(guī)模化養(yǎng)殖場喂料系統(tǒng)與下位機結(jié)構(gòu)圖

圖2 規(guī)模化養(yǎng)殖場喂料控制系統(tǒng)硬件設(shè)計圖
步進(jìn)電機的控制模塊采用L298N驅(qū)動模塊,單路峰值電流為3A,持續(xù)2A,控制系統(tǒng)如圖2所示。
2 軟件設(shè)計
系統(tǒng)在上位機與下位機控制下工作,實現(xiàn)喂料系統(tǒng)任務(wù)設(shè)置、參數(shù)傳輸、飼料傳送、系統(tǒng)復(fù)位等功能,控制流程如圖3所示。
系統(tǒng)工作時,上位機從數(shù)據(jù)庫中導(dǎo)入喂料數(shù)據(jù),并根據(jù)實際情況進(jìn)行微調(diào),確認(rèn)后發(fā)布給下位機。
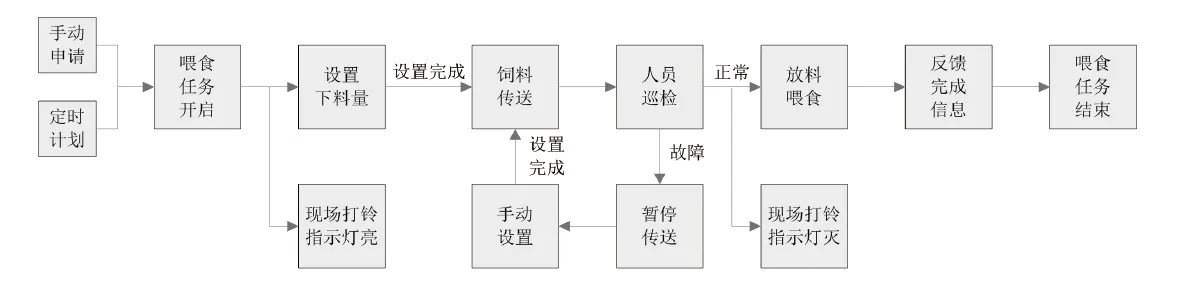
圖3 系統(tǒng)控制框圖
下位機接收上位機數(shù)據(jù),并進(jìn)行限料筒設(shè)置,完成后向上位機發(fā)送信號。上位機得到信號后,啟動電機傳輸飼料,并等待下位機反饋飼料傳輸完成的信號。上位機保留喂料信息,并預(yù)約下次喂料時間,下位機控制料筒喂食,并實現(xiàn)位置復(fù)原。具體上位機與下位機的流程如圖4與圖5所示。

圖4 系統(tǒng)控制上位機程序框圖
3 系統(tǒng)調(diào)試
如圖6所示,在淮陰種豬場測試系統(tǒng),對入欄的19頭母豬實現(xiàn)喂料控制,能夠根據(jù)專家數(shù)據(jù)科學(xué)實施精確喂養(yǎng),降低人力成本與資金成本。

圖5 系統(tǒng)控制下位機程序框圖

圖6 上位機控制界面
〔編輯:張思楠〕
TP273
A
10.15913/j.cnki.kjycx.2017.14.145
2095-6835(2017)14-0145-02
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17