基于某新型無人直升機帶保護架試飛的分析
2017-08-10 02:04:12張鄭源占貞強劉明锜
科學家 2017年12期
張鄭源+占貞強+劉明锜

摘 要 帶保護架試飛是無人直升機試驗試飛整個流程中的關鍵環(huán)節(jié),帶保護架試飛結果的好壞直接反應無人直升機的性能。本文在某新型無人直升機完成帶保護架試飛試驗后,運用ORIGIN軟件和MATLAB軟件對試飛數(shù)據(jù)進行了詳細分析與研究,得出了某新型無人直升機帶保護架試飛的結論,即該新型無人直升機各系統(tǒng)狀態(tài)良好,各傳感器工作正常,控制效果滿足技術指標要求,可進行后續(xù)的試驗試飛工作。
關鍵詞 帶保護架試飛;無人直升機;試飛數(shù)據(jù)
中圖分類號 V2 文獻標識碼 A 文章編號 2095-6363(2017)12-0034-02
1 概述
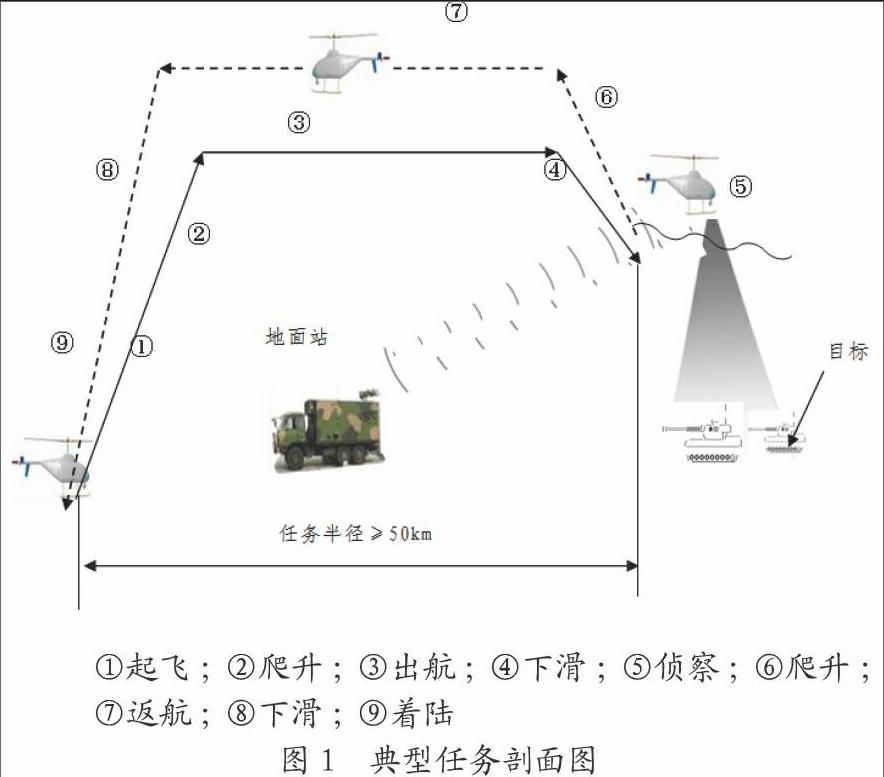
某新型無人直升機采用單旋翼帶尾槳式布局,機身主骨架為整體焊接空間桁架結構,滑橇式起落架,旋翼系統(tǒng)采用蹺蹺板構型,配備1臺四沖程活塞式汽油發(fā)動機[1],最大起飛重量460kg。航電及任務系統(tǒng)由全靜壓系統(tǒng)、大氣數(shù)據(jù)系統(tǒng)、無線電高度表,及任務設備:航管應答機、光電偵查設備組成。飛控系統(tǒng)采用自動控制、手動控制和混合控制三種飛控模式[2]。遙控遙測系統(tǒng)將指令發(fā)送給機載收發(fā)機,并從中接收數(shù)據(jù),機載收發(fā)機將指令通過串口轉發(fā)給飛控計算機。該型無人直升機在設計時具有一定的抗風、抗中雨和防塵防沙能力。搭載不同任務設備,該型無人直升機能在適宜飛行的晝夜氣象條件下執(zhí)行如下任務:偵察監(jiān)視,目標搜索、跟蹤、識別,目標指示,毀傷評估,通信中繼,雷場探測,海事監(jiān)控,搜索救援,核輻射偵查,警務執(zhí)法,農林作業(yè),大氣監(jiān)測,森林防火,電力巡線等。典型任務剖面見圖1。
該新型無人直升機先期已完成地面試驗,各系統(tǒng)地面試驗過程中工作正常,地面試驗取得良好效果,下一步進行飛行試驗。為保證試飛安全,降低無人直升機試飛時的風險系數(shù),在試飛前必須對該無人直升機進行安裝保護架,增大飛機著陸時接觸地面的范圍,避免試飛時尾槳葉觸地(尤其是起飛和著陸時尾槳葉容易觸地),以及避免主槳葉在機體進行俯仰和橫滾動作時觸地。進行帶保護架試飛試驗有以下試驗目的:1)檢查該新型無人直升機各系統(tǒng)在飛行時的工作情況,并考核各個系統(tǒng)的工作能力及狀態(tài),特別是發(fā)動機系統(tǒng)和飛控系統(tǒng)的功能和狀態(tài),使全機達到可以進行去保護架試飛的技術狀態(tài);2)進一步考核及調整該新型無人直升機發(fā)動機參數(shù)和飛行控制律參數(shù);3)使飛行操作員掌握該新型無人直升機的飛行特性。
2 保護架安裝方案
保護架必須能夠在無人直升機試飛時保護機體,避免尾槳葉和主槳葉觸地。保護架主要由防護鋁管、接頭組成。選用4根鋁管,在左起落架安裝1根鋁管,在右起落架安裝1根鋁管,在前部起落架安裝1根鋁管,在后部起落架安裝1根鋁管,保護架通過接頭安裝至起落架上。該型無人直升機起落架選用了輕型直升機上較為通用的滑橇式,滑橇式起落架具有結構簡單、重量輕,便于在雪地、草地和沙漠地帶起落的優(yōu)點。相對輪式起落架阻力可減小約40%以上,且滑橇式易于通過整流而進一步減小阻力。缺點是不能滑跑和不便于地面移動,需專設地面移動輪。
3 試飛內容與數(shù)據(jù)分析結果
由于該無人直升機之前雖然已經經過長時間的地面試驗,但飛行時全機各系統(tǒng)的飛行特性、飛行可靠性和穩(wěn)定性均無實際飛行經驗,為了降低飛行試驗風險,采取的試飛科目是帶保護架的人工操作無人直升機近地懸停。
1)試驗情況:無人直升機按正常流程地面開車至額定狀態(tài),無人直升機接入姿態(tài)保持、航向保持和位置保持功能,人工操作無人直升機起飛,在10m以內的高度進行近地懸停試飛,之后人工操作無人直升機著陸。無人直升機初始GPS高度為44m,初始航向為215.6°。
2)試驗要求:無人直升機姿態(tài)(俯仰和橫滾)、航向平穩(wěn),且位置可控,無人直升機發(fā)動機轉速控制精度在±150r/min以內(發(fā)動機額定工作轉速為5 500r/min)。
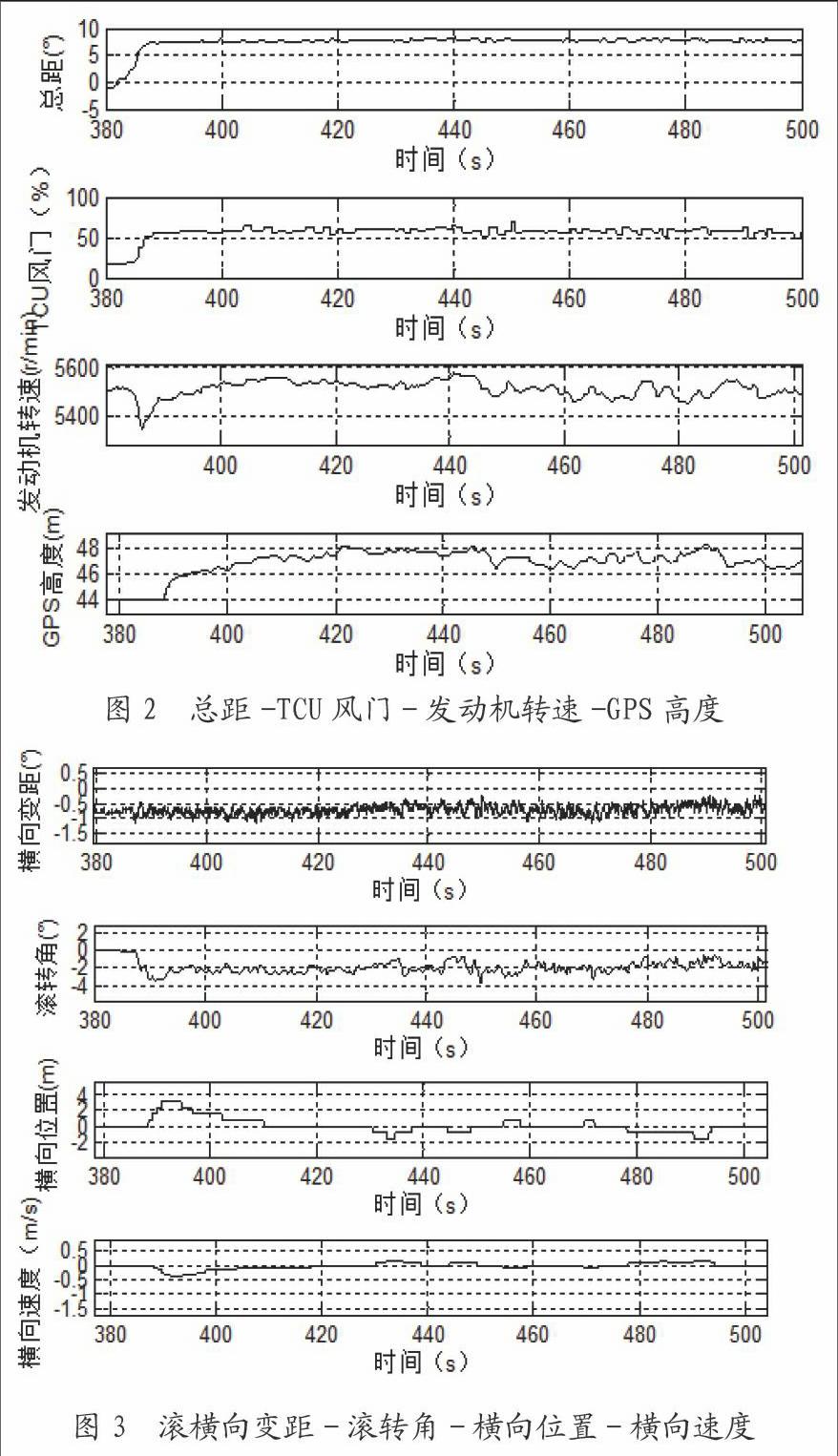
3)試驗結果與數(shù)據(jù)分析:截取發(fā)動機開車時間為380s~500s區(qū)間的飛行數(shù)據(jù),運用ORIGIN軟件和MATLAB軟件進行分析,分析結果如下(試驗數(shù)據(jù)曲線如圖2~圖9所示)。人工懸停時,無人直升機總距保持范圍:7.3°~8.3°,風門保持范圍:49.5%~68.3%,發(fā)動機轉速保持在:5 455r/min~5 582r/min,GPS高度保持范圍:46.4m~48.2m(初始GPS高度為44m);航向保持范圍:212.8°~218.4°,航向保持精度為:±2.8°;滾轉角保持范圍:-3.9°~-0.5°,滾轉角保持精度為:±1.7°,橫向位置保持范圍:-1.5m~3m;俯仰角保持范圍:-2.1°~1.3°,俯仰角保持精度為:±1.7°,縱向位置保持范圍:0~1.8m;缸頭1溫度最高104.9℃,缸頭2溫度最高102.9℃;排1溫度最高802.4℃,排2溫度最高793.3℃,排3溫度最高883.5℃,排4溫度最高906.1℃;滑油溫度最高97.1℃:滑油壓力變化范圍4.4bar~5.05bar;主減速器滑油溫度最高44.1℃;燃油壓力變化范圍0.596bar~0.623bar。
4)試驗結論:該新型無人直升機帶保護架人工近地懸停時,姿態(tài)(俯仰和橫滾)、航向平穩(wěn),位置可控,發(fā)動機轉速控制精度:-45r/min~82r/min,符合試驗要求(±150r/min以內)。
4 結論
通過某新型無人直升機帶保護架試飛的驗證,發(fā)現(xiàn)該新型無人直升機飛控系統(tǒng)控制該新型無人直升機姿態(tài)保持、位置保持和航向保持等精度較高,飛行控制效果滿足技術指標要求;同時,發(fā)動機工作狀態(tài)正常,轉速控制穩(wěn)定,發(fā)動機缸頭溫度,排氣溫度,滑油溫度正常。飛行操作員操縱該新型無人直升機感覺該無人直升機操縱性較好。同時,該新型無人直升機其他各系統(tǒng)狀態(tài)良好,傳感器工作正常。因此,可拆開保護架,開展后續(xù)的試驗試飛工作。
參考文獻
[1]張呈林,郭才根.直升機總體技術[M].北京:國防工業(yè)出版社,2006.
[2]楊一棟.直升機飛行控制[M].北京:國防工業(yè)出版社,2007.
[3]孫之釗.直升機強度[M].南京:南京航空航天大學出版社,2011.
