考慮駕駛員個體差異的汽車EPS控制仿真分析
2017-08-12 15:27:40王金波汪選要邱利宏
合肥工業大學學報(自然科學版) 2017年7期
王金波, 夏 光, 汪選要, 邱利宏
(1.合肥工業大學 汽車與交通工程學院,安徽 合肥 230009; 2.合肥工業大學 汽車工程技術研究院,安徽 合肥 230009)
?
考慮駕駛員個體差異的汽車EPS控制仿真分析
王金波1, 夏 光2, 汪選要1, 邱利宏1
(1.合肥工業大學 汽車與交通工程學院,安徽 合肥 230009; 2.合肥工業大學 汽車工程技術研究院,安徽 合肥 230009)
行車安全與駕駛員、車輛、道路等密切相關,而不同駕駛員個體之間的特性差異很大。文章將駕駛員分為A(熟練)、B(一般)、C(生手)3類,給定的行駛路徑作為駕駛員模型的輸入,轉向盤轉矩作為模型的輸出;將A類駕駛員的輸出轉向盤轉矩作為期望值,考慮不熟練駕駛員因對側向力感知缺乏而導致的誤操作轉矩的影響,提出了一種跟蹤期望駕駛特性的汽車電動助力轉向系統(electric power steering,EPS)控制策略,建立了能夠表征駕駛特性(熟練程度等)并考慮誤操作轉矩的駕駛員模型,與車輛組成人-車閉環系統。仿真結果表明,采用跟蹤期望駕駛特性的汽車EPS控制策略,改善了汽車的操縱穩定性,減輕了駕駛員的轉向負擔,從而驗證了該控制策略的有效性。
駕駛員;個體差異;電動助力轉向系統(EPS)控制;誤操作轉矩
汽車電控系統對于提高汽車的行駛安全性、乘坐舒適性等發揮了重要作用。人們對汽車的性能提出了越來越高的要求,因為車輛與駕駛員之間存在著相互作用和影響,所以考慮不同駕駛特性的駕駛員因素、建立人-車閉環的控制系統以提高汽車的性能成為目前研究的熱點之一。
轉向系統是汽車底盤的重要組成部分,它與駕駛員之間相互影響。文獻[1]利用人機相互作用原理設計電動助力轉向系統(electric power steering,EPS)控制器,確保駕駛員的安全和操作舒適;文獻[2]根據駕駛員的生理、心理和疲勞程度等將駕駛特性分為12類,并分析了駕駛行為特性與行車安全之間的關系;文獻[3]開發了駕駛員和車輛之間的界面,目的在于設計考慮駕駛特性影響的EPS控制器;文獻[4]考慮駕駛員的操縱特性,利用轉向盤轉角和轉矩,基于增益調度控制實現駕駛員和輔助系統的協調;文獻[5]設計了一種底盤集成控制系統,包括后輪主動轉向、縱向驅動力補償和直接橫擺力矩控制,建立了駕駛員模型,與車輛組成人-車閉環系統,提高了車輛的操縱穩定性和主動安全性,增強了車輛的路徑跟蹤能力;文獻[6-7]通過求解線性二次型調節器(linear quadratic regulator,LQR)問題得到預瞄和狀態的控制增益來模擬駕駛員的轉向動作,該駕駛員模型為線性模型;文獻[8]利用自適應閾值的向量場直方圖算法對智能車輛車道保持系統中避障路徑進行局部路徑規劃,輔助駕駛員控制車輛,減少了交通事故,提高了交通效率;文獻[9]利用試驗的方法獲取大量的試驗數據,通過辨識不同駕駛員的神經肌肉動力學和車輛動力學模型來模擬駕駛員的轉向行為;文獻[10]開發了準線性駕駛員模型,提出了包含駕駛員模型和牽引半掛車的閉環系統,研究結果表明,駕駛員的固有延時、半掛車的載荷和車速對閉環系統有重要的影響;文獻[11]采用容錯控制策略,針對傳感器故障情況設計控制器研究了EPS系統的容錯控制,有利于改善駕駛員的駕駛安全性;文獻[12]設計了包含四輪驅動電機和主動轉向系統的全輪驅動電動汽車,開發了路徑跟蹤和增益調度速度控制駕駛員模型,通過控制輸入跟蹤預定路徑,改變四輪的驅動轉矩,使得實際車速與期望車速偏差最小。
上述研究均考慮了駕駛員與車輛之間的相互作用及影響,但在駕駛員個體差異影響汽車EPS控制方面,尚未有深入研究。技術不熟練或駕駛水平中等的駕駛員遇到急轉彎等突發情況,往往會產生誤操作轉矩。本文建立了能夠表征駕駛特性(熟練程度等)并考慮誤操作轉矩的駕駛員模型,根據熟練程度和誤操作轉矩將駕駛員分為3類,與車輛組成人-車閉環系統,提出一種考慮駕駛員個體差異的汽車EPS控制策略,跟蹤期望駕駛特性,仿真結果驗證了該控制策略的有效性。
1 車輛-駕駛員模型
1.1 人-車-路閉環系統的坐標轉換
設車輛重心在t時刻的大地坐標系為(X(t),Y(t)),在相對坐標系的位置為(x(t),y(t))。車輛在任意時刻的速度為:
(1)


(2)
大地坐標系到相對坐標系的轉換方程為:

(3)
(2)式與(3)式組成了人-車-路閉環系統的坐標轉換環節。
車輛在大地坐標系和相對坐標系下的位置如圖1所示。

圖1 車輛在兩坐標系下的位置
1.2 駕駛員模型
駕駛員通過轉向、油門踏板與制動踏板來操縱車輛,因此駕駛員與車輛橫向、縱向的運動之間關系密切。已有的研究往往忽略駕駛員個體操縱差異對車輛狀態響應造成的影響。不同熟練程度、不同特性的駕駛員對車輛的操縱特性存在差異,不同特性的駕駛員在操縱車輛時會導致不同的車輛響應。因此,有必要根據駕駛員行為特性,建立駕駛員模型,對車輛控制進行研究。將駕駛員看作一個控制器,則預瞄時間、反應遲滯時間均為該控制器的參數,主要評價指標為車輛響應和駕駛員轉向負擔等。通過EPS的控制來減輕不同類型駕駛員的操縱負擔,提高汽車的操縱穩定性。
一定車速下,汽車的側向加速度對轉向盤轉角的穩態增益為Gay,達到期望側向加速度ay應該施加的期望轉向盤轉角[13]為:
(4)
(5)
其中,a、b為汽車質心到前后軸的距離;Ns為轉向盤轉角到車輪轉角的角傳動比;k為汽車的穩定性因數。
車輛轉向系統與駕駛員的肌肉系統在已有的研究中往往做簡化,由單純的時間延遲或一階滯后環節表示,運動時間的范圍為0.1~0.3 s。然而,該簡化通常用來描述小幅度的胳膊運動,用在車輛駕駛員轉向控制模型方面并不精確,駕駛員為實現轉向操縱作用在轉向盤上的轉矩Tg(s)與期望轉向盤轉角θh(s)之間的動力學響應可以表述成二階系統的形式[14],即
G1(s)=θh(s)/Th(s)=
1/[(Jd+Js)s2+(Bd+Bs)s+(Kd+Ks)]
(6)
其中,Jd、Bd、Kd分別為駕駛員胳膊的慣性、阻尼和剛度值;Js、Bs、Ks分別為轉向系統的慣性、阻尼和剛度值。
考慮駕駛員生理特性的實際轉向盤轉矩應包含反應時間的滯后,因此表示為:
其中,td為神經反應滯后時間,用一個純滯后環節表示。
預瞄環節為:
fe=f(t+T)
(7)
期望的側向加速度為:
(8)
由于不熟練駕駛員尤其是“新手”在實際操作過程中,往往存在誤操作轉矩,本文建立的駕駛員模型考慮誤操作轉矩的影響來模擬駕駛員的轉向行為,建立的控制系統如圖2所示。

圖2 駕駛員-車輛相互作用關系


2 EPS控制策略
為了提高駕駛員駕駛的舒適性和減少輪胎磨損,在一般的穩定狀態下,優先采用轉向來實現車輛的穩定控制。駕駛員尤其是不熟練的駕駛員在緊急情況下容易產生誤操作,該誤操作的程度用駕駛員誤操作轉矩Th′(s)來表示。如轉向過度時,EPS提供阻尼控制或減小助力,防止駕駛員過多轉向;轉向不足時,提供助力。駕駛員模型的輸入為期望道路軌跡與側向位移和側向速度與預瞄時間乘積的偏差,輸出為轉向盤轉矩。該轉向盤轉矩與駕駛員誤操作轉矩疊加,車輛模型計算得到的橫擺角速度、期望轉向盤轉矩作為EPS控制器的輸入,經計算后輸出前輪轉角給車輛模型。
駕駛員通過手臂系統給轉向盤施加轉矩,該轉矩經轉向系統傳遞到前輪。轉向過程中,由于轉向系統本身存在摩擦、阻尼及輪胎的回正力矩的影響,轉向系統會隨著轉向狀態的變化反饋給駕駛員一個力矩。因此,駕駛員操縱轉向盤的過程是一種動態的力矩交互過程。轉向盤動力學方程[15]為:
(9)
轉向輸出軸的方程為:
(10)
其中,θh為轉向盤轉角;θc為輸出軸轉角;Jh、Ch為轉向管柱的轉動慣量、阻尼系數;Tsat為前輪的回正力矩;Ta為電機的助力矩;N1為電機到轉向軸的傳動比;Jp為轉向軸的當量慣性矩;Cp為轉向軸的當量阻尼系數。
直流助力電機動力學方程為:
(11)
Tm=ktim
(12)
(13)
其中,Jm、Bm為助力電機轉向軸的慣性、阻尼;θm為助力電機轉向軸的轉向角;Tm為助力電機輸出軸的轉矩;kt為助力電機的力矩常數;im為助力電機的電流值;Lm、R為助力電機電氣部件的電感和電阻值;ke為電機的反電動勢常數;U為電機電壓。
車輛的實際橫擺角速度從傳感器信號中獲取,并以此作為確定轉向助力矩Tm大小的依據。
(14)
(15)
其中,kp、ki、kd為PID控制參數;C(s)為橫擺角速度偏差的超前補償器。
3 仿真分析
不同的目標道路軌跡作為本文駕駛員模型的輸入,輸出是轉向盤轉矩,再將該轉向盤轉矩與駕駛員誤操作轉矩疊加后輸入給EPS控制器,從而進行人-車閉環虛擬試驗。為了驗證本文所提出的EPS控制策略的有效性,對人-車非線性車輛動力學模型進行車速為40 km/h雙移線工況下的仿真分析,雙移線試驗工況的目標路徑如圖3所示。

圖3 雙移線試驗工況的目標路徑
x軸表示縱向位移,側向位移函數f(x)[16]為:
(16)
其中


f22={-2b(s1+s2+s3)[2s1+2s2+2s3+


s4=25 m,s5=96 m,b=3.5 m。
駕駛員的神經反應滯后時間和動作反應滯后時間受年齡、性別、個性、健康狀況等特性的影響。通常情況下,熟練駕駛員的反應時間較短,而不熟練駕駛員反應時間較長。仿真時不同熟練程度的駕駛員對應的模型參數見表1所列。車輛部分主要參數見表2所列。

表1 不同駕駛特性對應的駕駛員模型參數

表2 車輛部分主要參數
轉向盤轉矩、轉向助力矩、橫擺角速度響應分別如圖4~圖6所示。

圖4 轉向盤轉矩響應曲線
由圖4可知,由于駕駛員A具有較長的預瞄時間和較短的神經反應滯后時間,在經過相同的路徑時,相比于駕駛員B和賀駛員C,轉向盤轉矩較小,即熟練駕駛員的轉向輕便性較好。

圖5 轉向助力矩
由圖5可知,采用跟蹤期望駕駛特性的汽車EPS控制策略,助力電機分別提供給駕駛員B和駕駛員C轉向助力矩;且提供給駕駛員B的轉向助力矩比提供給駕駛員C的小。在所設計的EPS控制策略中,EPS助力電機提供的轉向助力矩大小與駕駛員的熟練程度有關。

圖6 橫擺角速度響應
由圖6可知,駕駛員A、B、C在無EPS控制的情況下,橫擺角速度依次增大;當駕駛員B、C在有EPS控制的情況下,橫擺角速度變小,車輛穩定性變好。
由于人受到身體胳膊等生理條件的限制,轉向能力在一定范圍內,即最大轉向角及轉向角速度表征了人體的生理極限。駕駛員轉向角及轉向角速度越大,表明駕駛員在操縱轉向盤的過程中,越接近生理極限,即轉向負擔越大。駕駛員轉向角的大小與駕駛員的體力負擔相關,而駕駛員轉向角速度的大小與駕駛員的精神負擔相關。用一定時間內轉向角和轉向角速度平方的積分分別表示駕駛員的轉向體力負擔和精神負擔,駕駛員的體力負擔J1和精神負擔J2分別為:
(17)
(18)
駕駛員轉向體力、精神負擔如圖7所示。
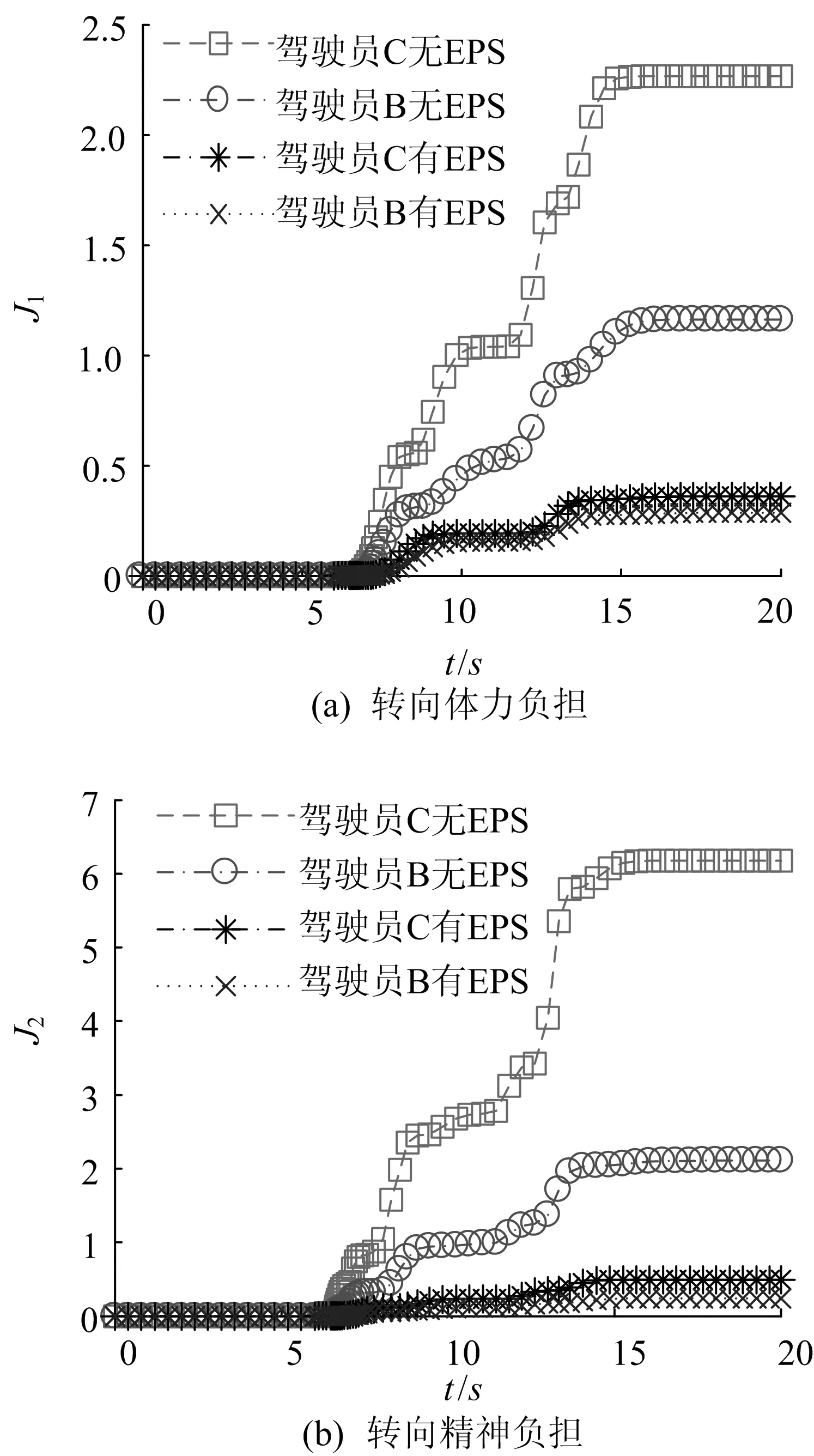
圖7 駕駛員轉向負擔
由圖7可知,駕駛員A具有較大的預瞄時間,能夠有效地減小轉向負擔,而駕駛員C增加了轉向負擔。研究結果表明,預瞄時間和反應時間能夠顯著影響車輛系統的動力學特性和駕駛員的轉向負擔,較大的預瞄時間和較小的反應時間,能夠有效減輕駕駛員的轉向負擔。
仿真結果表明:采用跟蹤期望駕駛特性的汽車EPS控制策略具有較好的控制效果,底盤系統能夠獲得更好的控制性能,顯著提高了車輛的操縱性和行駛穩定性,并減小了不熟練駕駛員的轉向負擔;在相同的EPS控制策略下,較熟練的駕駛員能夠有效減小轉向負擔,新手為了實現路徑跟蹤特性,需要更大的轉向負擔。本文提出的EPS控制策略,能夠減輕不熟練駕駛員的轉向負擔。
4 結 論
駕駛員A、B、C的轉向盤操作轉矩峰值分別為3.4、4.2、6.1 N·m;駕駛員A的轉向盤操作轉矩峰值比駕駛員B、C分別減小了19.05%、44.26%,表明相同行駛條件下,熟練駕駛員的轉向盤操作轉矩較小。駕駛員B、C的轉向助力矩峰值分別為0.26、0.37 N·m;駕駛員B的轉向助力矩峰值比駕駛員C的減小了29.23%,表明相同行駛條件下,不熟悉駕駛員需要的轉向助力矩較大。
在深入分析汽車動力學特性與駕駛行為特性的基礎上,本文提出了一種考慮駕駛員個體差異的汽車EPS控制策略,減輕了不熟練駕駛員的駕駛轉向負擔,保證汽車的穩定行駛性。仿真結果驗證了該控制策略的穩定性和有效性,提高了汽車的行駛穩定性。
[1] SUGITA S,TOMIZUKA M,EI-SHAER A.Human-machine interaction in vehicle steering:SAE Paper 2009-01-0359[R]. [S.L]:SAE,2009.
[2] 何杰,楊嬌,杭文,等.考慮駕駛員行為特性的行車安全仿真試驗[J].解放軍理工大學學報(自然科學版),2013,14(6):668-673.
[3] MEHRABI N,SHOURIJEH M S,MCPHEE J.Study of human steering tasks using a neuromuscular driver model[C]//Advanced Vehicle and Control Conference.Pennsylvania State: [s.n.],2012.
[4] FUJIWARA Y,ADACHI S.Steering assistance system for driver characteristics using gain scheduling control[C]//2003 European Control Conference.Cambridge:European Union Control Association,2003:898-903.
[5] 李昌剛,武建勇,唐厚君,等.基于底盤集成控制的人-車閉環系統對提高車輛操縱穩定性和路徑跟蹤能力的效果研究[J].汽車工程,2009,31(9):812-819.
[6] SHARP R S,CASANOVA D,SYMONDS P.A mathematical model for driver steering control,with design,tuning and performance results[J].Vehicle System Dynamics,2000,33(5):289-326.
[7] SHARP R S,VALTETSIOTIS V.Optimal preview car steering control[J].Vehicle System Dynamics,2001,35(1):101-117.
[8] 汪明磊,陳無畏,王家恩.智能車輛車道保持系統中避障路徑規劃[J].合肥工業大學學報(自然科學版),2014,37(2):129-133.
[9] ODHAMS A M C.Identification of driver steering and speed control[D].London:Cambridge University,2006.
[10] LI X S,ZHANG J W,WANG M G.Driving stability of closed loop tractor-semitrailer vehicle system with optimal driver model[C]//2009 International Conference on Measuring Technology and Mechatronics Automation.[S.l.:s.n.],2009:514-517.
[11] 胡延平,趙林峰,趙斌,等.基于容錯控制的電動助力轉向故障診斷系統設計[J].合肥工業大學學報(自然科學版),2013,36(1):20-23.
[12] JALALI K,LAMBERT S,MCOHEE J.Development of a path-following and a speed control driver model for an Electric Vehicle:SAE Paper 2012-01-0250[R].[S.l.]:SAE,2012.
[13] 丁海濤,郭孔輝,李飛,等.基于加速度反饋的任意道路和車速跟隨控制駕駛員模型[J].機械工程學報,2010,46(10):116-120.
[14] TAHERI S,RAKHEJA S,HONG H.Influence of human driving characteristics on path tracking performance of vehicle[C]//Proceedings of the 5th International conference on Intelligent robotics and Applications.Berlin,Heidelberg:Springer-Verlag,2012:207-216.
[15] 趙林峰,陳無畏,秦煒華,等.低附著路面條件的EPS控制策略[J].機械工程學報,2011,47(2):109-114.
[16] 蘇運福.基于駕駛員行為模型預測的汽車動力學控制研究[D].長春:吉林大學,2015.
(責任編輯 胡亞敏)
Simulation analysis of vehicle EPS control considering driver individual differences
WANG Jinbo1, XIA Guang2, WANG Xuanyao1, QIU Lihong1
(1.School of Automobile and Traffic Engineering, Hefei University of Technology, Hefei 230009, China; 2.Institute of Automobile Engineering Technology, Hefei University of Technology, Hefei 230009, China)
Road safety is closely related with the driver, vehicle, road, etc., and there is large difference between different drivers’ individual characteristics. Drivers can be divided into three categories, namely A, B and C(skilled, general and unskilled). A given driving path is taken as the input of the driver model, and the steering wheel torque as the output. Taking the output of the skilled driver’s steering wheel torque as the desired value, considering the wrong operation torque caused by the unskilled drivers due to lack of perception of the lateral force, a control strategy of vehicle electric power steering(EPS) tracking the desired driving characteristics is proposed. The driver model which can characterize the driving characteristics like proficiency, etc. and consider the wrong operation torque is established, and the driver-vehicle closed-loop system is built with the model and the vehicle. Simulation results show that the control strategy of vehicle EPS tracking the desired driving characteristics improves the vehicle handling stability and reduces the driver’s steering efforts, thus verifying the effectiveness of the proposed control strategy.
driver; individual difference; electric power steering(EPS) control; wrong operation torque
2016-01-19;
2016-02-29
國家自然科學基金資助項目(51175135;51205101)
王金波(1979-),男,山東臨朐人,合肥工業大學博士生; 夏 光(1983-),男,安徽宿州人,博士,合肥工業大學副研究員,通訊作者,E-mail:xiaguang008@163.com.
10.3969/j.issn.1003-5060.2017.07.001
U461.6
A
1003-5060(2017)07-0865-06
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
公民與法治(2016年4期)2016-05-17 04:09:26
作文大王·低年級(2016年4期)2016-04-18 00:24:37
通信電源技術(2016年1期)2016-04-16 04:57:26
決策探索(2014年21期)2014-11-25 12:29:50
