基于Labview-RT和CarSim的EPS硬件在環試驗臺開發與仿真研究
2017-08-12 15:27:40王慧然羅家亮
合肥工業大學學報(自然科學版) 2017年7期
關鍵詞:模型
王慧然, 黃 鶴, 羅家亮
(合肥工業大學 汽車與交通工程學院,安徽 合肥 230009)
?
基于Labview-RT和CarSim的EPS硬件在環試驗臺開發與仿真研究
王慧然, 黃 鶴, 羅家亮
(合肥工業大學 汽車與交通工程學院,安徽 合肥 230009)
文章以電動助力轉向系統(electric power steering,EPS)硬件在環試驗臺為研究對象,對傳統方法中使用二自由度車輛模型建立的試驗臺進行了介紹,并提出采用CarSim軟件提供的二十七自由度車輛模型建立硬件在環試驗臺。基于CarSim軟件建立的試驗臺使用Labview軟件并以PXI實時系統為運行環境,采用伺服電機模擬轉向阻力矩。試驗結果表明,該試驗臺有更好的試驗效果,可以模擬出車輛在不同工況下運行的自回正效果,為EPS控制策略開發提供了良好的試驗平臺。
硬件在環;試驗臺;轉向阻力矩;伺服電機;電動助力轉向系統(EPS)
在電動助力轉向系統(electric power steering,EPS)的開發中,實車試驗是必不可少的一個環節,但實車試驗的風險大、費用高,而硬件在環仿真在沒有原型車的情況下依然可以進行參數研究、性能預測、問題識別以及策略建議[1]。因此研制具有高精確度的硬件在環試驗臺對EPS控制器的開發有著至關重要的作用[2]。文獻[1]在EPS控制系統研究中使用了CarSim搭建的EPS硬件在環試驗臺,但其對試驗臺的有效性未做進一步說明;文獻[3-4]設計了基于磁粉加載器的電動助力轉向試驗臺測試系統,但對EPS硬件在環試驗未做更深的研究;文獻[5]中使用了基于彈簧加載的硬件在環試驗臺,這種加載方式不能隨著車輛的轉向狀態進行實時調整,很難對EPS的控制策略進行有效的驗證;文獻[6-8]所設計開發的電動助力轉向器硬件在環仿真試驗平臺都是基于伺服電機加載的,在EPS總成輸入端增加了伺服電機加載裝置,都側重于EPS的助力特性測試,在車輛的自回正狀態以及EPS硬件在環測試方面未做試驗驗證。
從上述文獻可知,EPS硬件在環試驗臺的傳統方法大多采用自行建立的車輛模型和輪胎模型對轉向反作用力矩進行求解,其試驗精度不高。
為了能夠實時地模擬出車輛自回正狀態以及使EPS助力和回正硬件在環試驗具有更高的精度,本文在傳統方法的基礎上,提出了選用CarSim提供的二十七自由度車輛模型,并聯合Labview-PXI實時系統建立能夠模擬輪胎自回正力矩的EPS硬件在環試驗臺,同時與用二自由度車輛模型(傳統方法之一)建立的試驗臺進行了對比試驗。
利用二自由度車輛模型建立的試驗臺根據Fiala輪胎模型求出輪胎的自回正力矩。利用CarSim車輛模型建立的試驗臺將CarSim里面的轉向系統用實際的EPS系統替換,試驗人員通過觀察CarSim里面的實時車輛動畫來操縱轉向盤,CarSim里面運行的車輛根據接收到的轉向信號做出相應的調整,并根據CarSim提供的輸出參數求出作用在EPS管柱下端的反作用力矩。兩者最終都通過伺服電機模擬出作用在EPS管柱下端的轉向阻力矩。
試驗結果表明,相比于傳統方法建立的試驗臺,使用CarSim模型建立的試驗臺可以更好地模擬出車輛運動狀態,為EPS控制策略的開發提供了更加有效的試驗平臺。
1 EPS試驗臺原理
汽車轉向時,在轉向盤操縱轉矩一定的情況下,路面作用于輪胎等效至轉向柱的轉矩決定了電動機作用在轉向系統上的助力轉矩,即路面作用于兩前輪回正力矩之和決定了助力力矩[9]。因此,在EPS提供助力時,輪胎的自回正力矩表現出阻力的作用;在車輛回正時,輪胎的自回正力矩表現出助力的作用。這就決定了在EPS硬件在環仿真中,最重要的是準確模擬轉向反作用力矩。本文在轉向反作用力矩計算上采用了作為對比的二自由度車輛模型與CarSim車輛模型2種方法,試驗臺信號框圖如圖1所示。
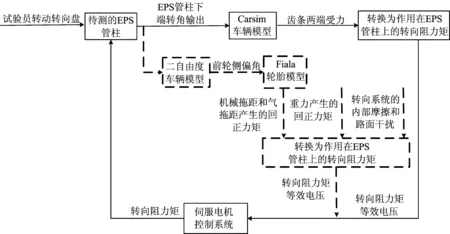
圖1 試驗臺信號框圖
1.1 用二自由度車輛模型建立的試驗臺
使用二自由度車輛模型的試驗臺,需借助于輪胎模型對輪胎的自回正力矩進行求解。假定汽車只做平行于路面的平面運動,簡化的兩輪車二自由度模型[10]如圖2所示,其動力學方程為:
(1)
(2)
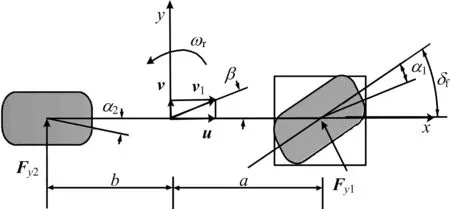
圖2 二自由度車輛模型
圖2中,δf為前輪轉角;ωr為橫擺角速度;Fy1、Fy2為前、后輪所受到的側向力大小;α1、α2為前、后輪的側偏角;v、u分別為質心處速度v1在y、x軸上的分量大小;β為質心處車速與汽車縱軸線的夾角;a、b為前后軸到汽車質心間距離;Iz為車身繞z軸的轉動慣量。前、后輪的α1、α2由幾何關系可得:
(3)
利用參數較少且能反映出輪胎非線性特性的Fiala輪胎模型求出輪胎所受側向力以及氣胎拖距產生的回正力矩,即
(4)
(5)

(6)
將(6)式帶入(5)式求出Tp值,根據求出的Tp值可以求出轉向小齒輪的轉向力矩Tr的值,即
(7)
Tm=Fy1tm
(8)
其中,N為轉向軸到前輪的傳動比;Msz為重力引起的回正力矩;Tf為轉向系摩擦力矩;σ(t)為與路面有關的干擾函數;tm為機械拖距。Msz、Tf和σ(t)可以根據文獻[11]的方法求得。用二自由度車輛模型建立的試驗臺信號流程見圖1虛線部分,在Labview里面將轉向力矩Tr的值轉化為相應的電信號,通過伺服電機作用在EPS管柱下端。
1.2 用CarSim建立的試驗臺
使用CarSim車輛模型的試驗臺選用了實際EPS轉向管柱和CarSim車輛模型相結合的方式,如圖3所示。將CarSim里面的轉向系統設定為純機械式轉向,將待測的EPS系統加入到該模型中。
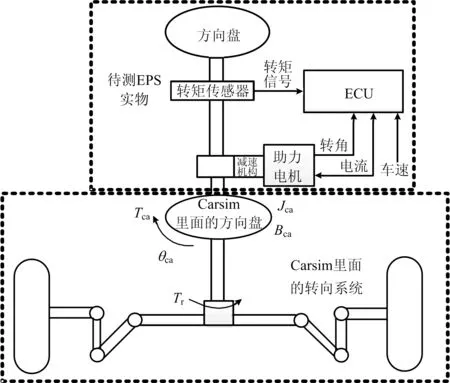
圖3 試驗臺(CarSim)系統簡圖
為了減小轉角輸入的誤差,考慮到待測EPS轉向管柱的扭轉性質,本文不采用待測EPS轉向盤轉角直接輸入,而采用轉向管柱下端的輸出轉角θca作為CarSim模型的輸入,見圖1實線部分。利用伺服電機的轉角速度監測功能,根據伺服控制系統提供的轉角速度求出輸出轉角θca的值。雖然CarSim里面的轉向系統已設定為機械式轉向,但CarSim轉向盤組件仍然存在,因此在試驗時需要考慮CarSim里面轉向盤的轉動慣量、阻尼等動態特性。因為CarSim軟件自身的設定,在轉向系統為機械式轉向時,轉向盤轉矩無法提取,所以本文選用CarSim里面轉向小齒輪作用在轉向管柱上的反作用力矩Tr。因此有:
(9)
其中,Tca為CarSim中轉向盤轉矩;θca、Jca、Bca分別為CarSim中轉向盤的轉角、轉動慣量、阻尼,最終將由(9)式得出的Tca值通過Labview發送給伺服電機。
2 試驗臺硬件組成
為了能夠實現實際EPS管柱與車輛模型之間信息的快速交互。本試驗臺采用了美國NI公司的PXI作為下位機,高性能的工控機作為上位機,下位機里嵌入了CAN卡和PCI數據采集卡,如圖4所示。
為了實現對轉向阻力矩的實時模擬,試驗臺采用了型號為MDME系列、額定轉矩為9.55 N·m的D型伺服電機以及相應的E型驅動器,該伺服控制系統自帶電機轉速實時檢測模塊,其通過電壓信號的形式表現出來。同時選用了減速比為1∶17的減速機構,從而使負載模擬裝置能夠模擬大部分乘用車轉向時轉向管柱下端所承受的轉向阻力矩。
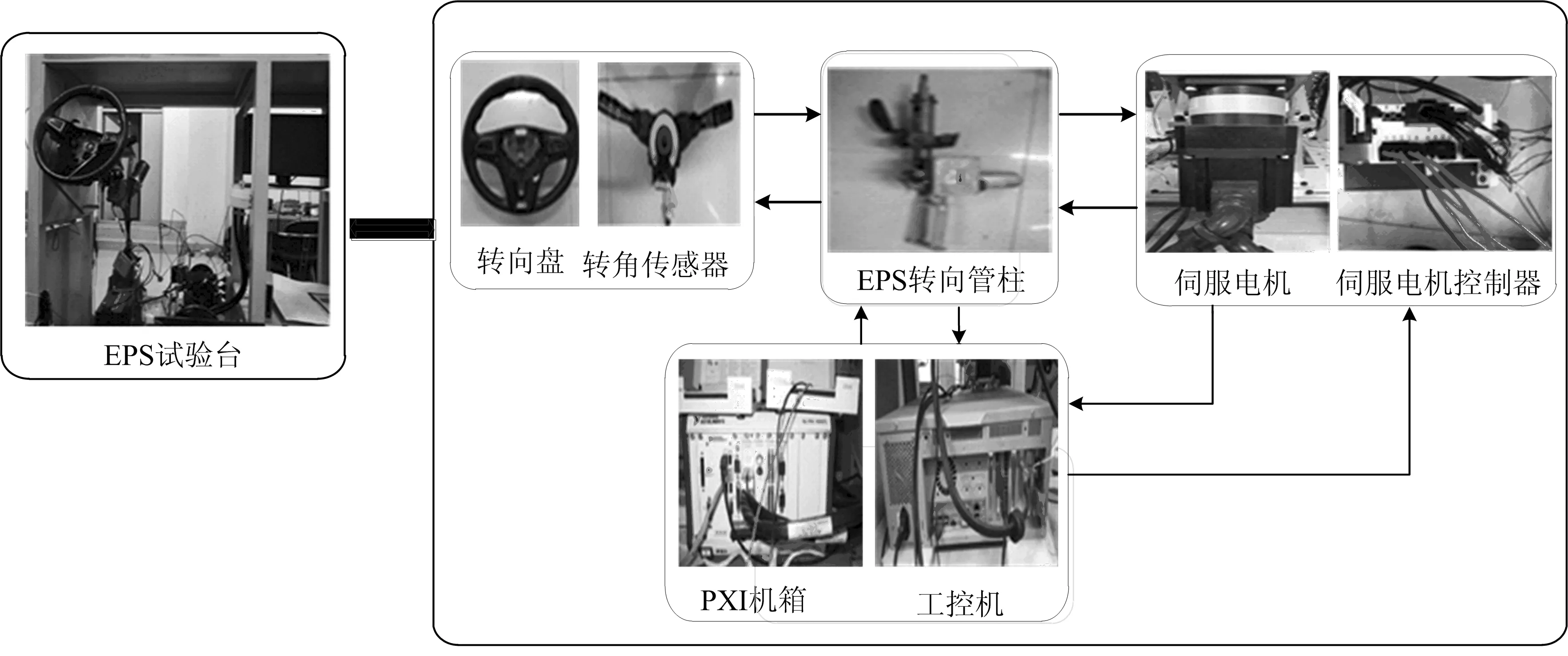
圖4 試驗臺硬件組成圖
3 試驗臺的軟件及測試程序開發
EPS試驗臺在車輛動力學仿真上采用了CarSim仿真軟件,在數據采集上用Labview軟件,在運行環境上采用PXI實時系統,在伺服系統參數寫入方面采用松下開發的Panaterm軟件。
Panaterm軟件的使用簡化了試驗臺的操作,程序化的界面處理代替了控制面板按鈕對伺服系統的參數設定。CarSim軟件提供了二十七自由度的車輛模型,該軟件可以通過對整車參數的設定實現對不同車型的仿真試驗[12]。試驗時CarSim可以實時顯示車輛的運行動畫,同時其帶有“Transfer to Labview RT”模塊,可以與Labview軟件之間進行實時的信息傳遞。基于這2款軟件開發的硬件在環測試程序包括數據采集程序、數據發送程序和運算程序。
3.1 數據采集與發送程序
用Labview建立的數據采集程序主要包括轉向盤轉角、轉向盤轉矩和EPS管柱下端輸出角θca3個部分。轉向盤轉角信號由轉角傳感器以CAN信號形式發送,轉向盤轉矩信號由EPS管柱自帶的轉矩傳感器以方波的形式發送,輸出角θca由電機自帶的轉角速度信號間接得到。數據發送程序主要包括如下2個模塊:
(1) 有刷電機EPS控制器工作時所需的點火信號、發動機轉速信號和車速信號發送模塊。
(2) 利用伺服電機模擬出轉向盤轉矩Tca的發送模塊。
對伺服系統的參數、減速機構參數進行分析后,得出發送的電壓信號與EPS管柱受到的反作用力矩T之間的關系式為:
T=G1G2V
(10)
其中,G1為伺服電機的轉矩輸出增益;G2為減速結構的減速比;V為發送的電壓信號。
3.2 運算程序
上述2種試驗臺在數據采集與發送程序開發上相同,其區別主要體現在運算程序模塊。用二自由度模型開發的試驗臺需在Labview里面建立整車模型和輪胎模型,最終輸出轉向力矩Tr對應的電壓信號。
用CarSim整車模型建立試驗臺,在Labview里面開發運算程序。運算程序是在Labview里面導入CarSim整車模型,其關鍵點是對Labview里面“替換數組子集.VI”使用,在使用“Transfer to Labview RT”模塊生成的Labview初始程序中,輸入信號的信號源是CarSim模型中轉角模塊的初始值,此時需將CarSim里面原來的轉角初始賦值用“替換數組子集.VI”替換成采集生成的輸出角θca值。
4 硬件在環試驗
為了驗證所開發試驗臺的有效性,進行了車輛轉向輕便性和回正性2個部分的試驗。在試驗臺上使用自主開發的有刷電機EPS控制器,在CarSim中設定了路面附著系數分別為0.3、0.6和0.9的1 km2試驗場地。
根據某公司某款車的參數對CarSim里面的車輛部分參數及(1)~(8)式中所使用的參數進行設定,結果見表1所列。
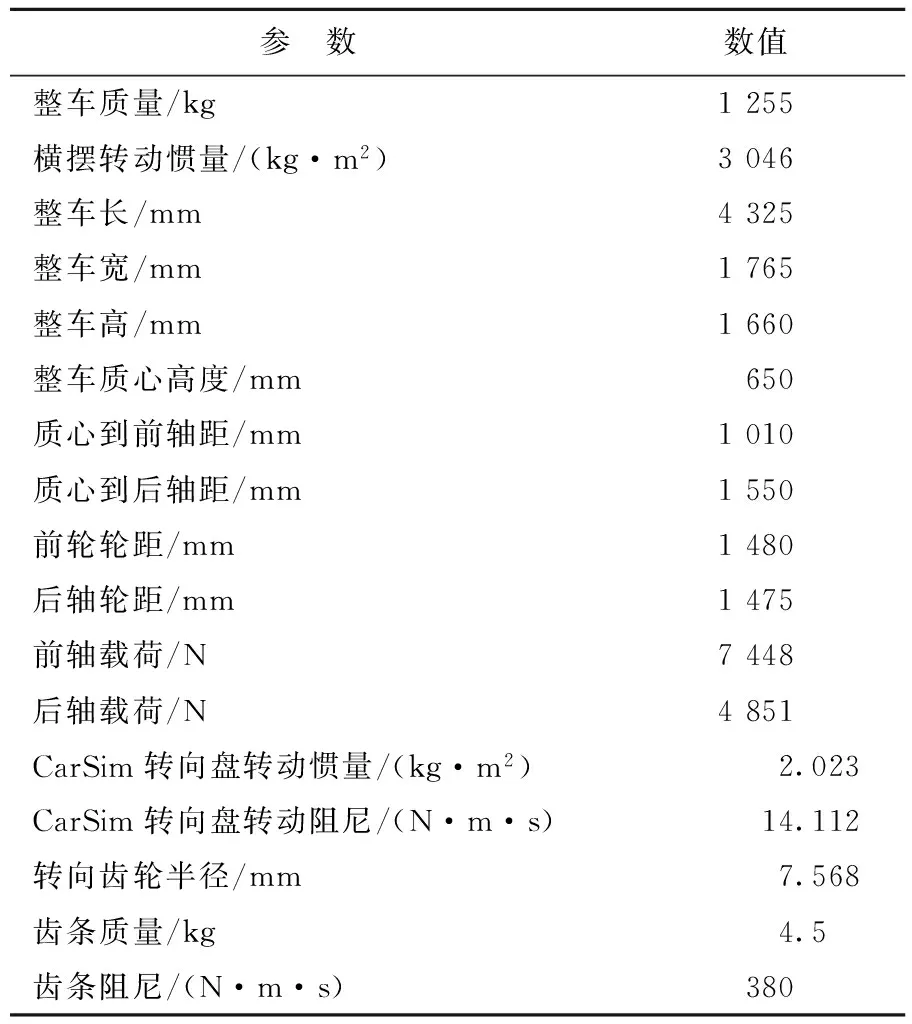
表1 車輛部分結構參數
4.1 轉向輕便性對比試驗
在Labview里面設定Fiala輪胎模型中路面附著系數為0.9,在CarSim里面選擇附著系數為0.9的試驗場,在試驗臺上以車速為40 km/h進行轉向輕便性對比試驗,并用某公司某款車作為試驗車,在路面附著系數近似為0.9的干燥水泥路面上以40 km/h進行轉向輕便性試驗,試驗結果如圖5所示。

圖5 轉向盤轉角和轉矩關系曲線
由圖5可知,上述2種方法得出的試驗數據表明,用CarSim模型建立的試驗臺在轉向輕便性硬件在環試驗上與實車得出的數據更加相近,表明基于CarSim模型的試驗臺可以更好地用于EPS開發中的硬件在環試驗。
4.2 回正試驗
在用CarSim車輛模型搭建的試驗臺上進行回正試驗。關閉控制器里面的回正控制模塊,在路面附著系數為0.9的試驗道路上分別以20、40、60 km/h的車速進行車輛自回正試驗,試驗結果如圖6所示。
由圖6可知,在相同的轉向盤轉角下做撒手回正試驗,隨著車速的增大,轉向盤的回正殘余角變小,這是由車速增大導致輪胎提供自回正力矩增大引起的。

圖6 不同車速下的自回正曲線
控制器里面的回正控制模塊保持關閉狀態,在路面附著系數為0.3、0.6、0.9的路面上以60 km/h進行試驗,試驗結果如圖7所示。
由圖7可知,在路面附著系數不同的道路上進行撒手回正試驗,隨著路面附著系數的降低,輪胎所能提供的自回正力矩減小,從而導致回正殘余角變大。
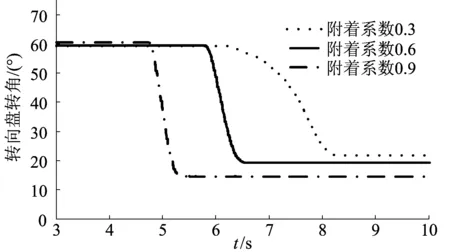
圖7 不同路面附著系數下的自回正曲線
開啟控制器中考慮路面附著系數的回正控制模塊。在路面附著系數為0.3的路面上以車速40 km/h進行開啟和關閉回正控制的對比試驗。試驗結果如圖8所示。
由圖8可知,在考慮路面附著系數的回正控制策略作用下,EPS系統能夠改善車輛在低附著系數路面上的回正不足,減小回正時間。
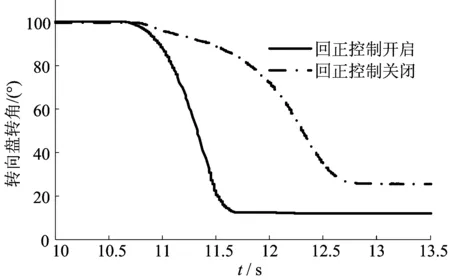
圖8 有無回正控制的回正曲線
上述試驗表明,基于CarSim模型的試驗臺能夠進行有效的硬件在環試驗,并且可以很好地模擬出不同行駛工況下的車輛自回正狀態。
5 結 論
本文開發了基于Labview-RT和CarSim聯合的EPS硬件在環試驗臺,試驗人員操作轉向盤,以EPS轉向管柱下端的輸出轉角作為輸入,在CarSim里面提取轉向小齒輪作用在轉向管柱上的反作用力矩,并將其換算成CarSim轉向盤轉矩,最終通過伺服電機模擬出EPS管柱下端受到的反作用力矩。
硬件在環試驗結果表明,使用CarSim模型的試驗臺擁有更好的試驗效果,可以模擬出不同車速和路面附著系數下的車輛運動狀態,有很好的車輛自回正模擬效果,為研究考慮路面附著系數的EPS控制策略提供了更加有效的試驗平臺。
[1] TOYOHIRA T,NAKAMURA K,TANNO Y.The validity of EPS control system development using HILS:SAE Technical Paper 2010-01-0008[R]. [S.l.]:SAE,2010.
[2] YEH C J,HO S R,LIN M C,et al.Development of a test bench for tuning and validating electric power steering control method[C]//Vehicle Power and Propulsion Conference.[S.l.]:IEEE,2007:618-622.
[3] 謝展強,邱明.汽車電動助力轉向硬件在環仿真系統設計[J].機械與電子,2004(2):62-64.
[4] 郭艷玲,武志明,李志鵬,等.電動助力轉向器試驗臺硬件系統研究[J].節能技術,2014,32(1):65-68.
[5] HU Y S,JI X W,CHEN K Y,et al.Elementary study on BLDC controller for electric power steering system:SAE Technical Paper 2004-1-1096[R].[S.l.]:SAE,2004.
[6] 姚棟偉,吳鋒,楊志家,等.基于雙伺服電機的電動助力轉向器硬件在環仿真試驗平臺[J].浙江大學學報(工學版),2009,43(10):1931-1934.
[7] 羅蘇安.汽車電動助力轉向系統硬件在環仿真[D].武漢:武漢理工大學,2012.
[8] 胡堅.基于硬件在環仿真的電動助力轉向試驗臺的研究[D].武漢:武漢理工大學,2012.
[9] 楊軍,陳無畏,趙林峰,等.基于ESP功能分配的EPS回正力矩補償控制策略[J].汽車工程,2015,37(7):794-801.
[10] HSU Y H J.Estimation and control of lateral tire forces using steering torque[D].Stanford:Stanford University,2009.
[11] 趙林峰,陳無畏,秦煒華,等.低附著路面條件的 EPS 控制策略[J].機械工程學報,2011,47(2):109-114.
[12] KWON J,PARK K.Development of the Hardware-in-the loop simulator for evaluating performance of EPS system:SAE Technical Paper 2011-28-0139[R].[S.l.]:SAE,2011.
(責任編輯 胡亞敏)
Development and simulation research of EPS hardware-in-the-loop test platform based on Labview-RT and CarSim
WANG Huiran, HUANG He, LUO Jialiang
(School of Automobile and Traffic Engineering, Hefei University of Technology, Hefei 230009, China)
Taking the electric power steering(EPS) hardware-in-the-loop test platform as the research object, the traditional method using two degrees of freedom vehicle model is introduced, and the method using CarSim software with 27 degrees of freedom vehicle model to design hardware-in-the-loop test platform is put forward. The test platform based on CarSim software adopts the Labview software and PXI real-time system as the operating environment, and the servo motor is used to simulate the steering resistance torque. Test results show that the presented test platform has a better test effect, which can simulate the positive return of the vehicle under different conditions and provide a better platform for the development of EPS control strategy.
hardware-in-the-loop; test platform; steering resistance torque; servo motor; electric power steering(EPS)
2016-01-19;
2016-04-08
安徽省自然科學基金資助項目(1508085QE92)
王慧然(1991-),男,安徽巢湖人,合肥工業大學碩士生; 黃 鶴(1983-),男,安徽合肥人,博士,合肥工業大學講師,通訊作者,E-mail:cranehh@sohu.com.
10.3969/j.issn.1003-5060.2017.07.003
U463.4
A
1003-5060(2017)07-0877-06
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
