碼垛機(jī)器人工作空間合理度量化評(píng)價(jià)方法及應(yīng)用
2017-08-12 15:27:40燕培磊盧劍偉馬樹全
關(guān)鍵詞:評(píng)價(jià)
燕培磊, 盧劍偉, 馬樹全
(合肥工業(yè)大學(xué) 汽車與交通工程學(xué)院,安徽 合肥 230009)
?
碼垛機(jī)器人工作空間合理度量化評(píng)價(jià)方法及應(yīng)用
燕培磊, 盧劍偉, 馬樹全
(合肥工業(yè)大學(xué) 汽車與交通工程學(xué)院,安徽 合肥 230009)
文章提出了一種對(duì)四自由度碼垛機(jī)器人工作空間合理程度進(jìn)行量化評(píng)價(jià)的方法。應(yīng)用D-H法建立待評(píng)價(jià)機(jī)器人坐標(biāo)系,將最小長(zhǎng)方體任務(wù)空間轉(zhuǎn)化為子午面內(nèi)矩形任務(wù)空間,對(duì)比分析機(jī)器人實(shí)際工作空間與矩形任務(wù)空間的偏差,并結(jié)合對(duì)于工作空間利用效率的考慮,提出了應(yīng)用工作空間利用率及左側(cè)輪廓斜率絕對(duì)值評(píng)價(jià)機(jī)器人工作空間合理程度的方法。算例驗(yàn)證表明,該評(píng)價(jià)方法有效,相關(guān)方法對(duì)四自由度碼垛機(jī)器人的結(jié)構(gòu)設(shè)計(jì)及優(yōu)化有一定的指導(dǎo)意義。
碼垛機(jī)器人;工作空間;任務(wù)空間;空間利用率;量化評(píng)價(jià)
工作空間是碼垛機(jī)器人的一項(xiàng)重要技術(shù)指標(biāo),反映了碼垛機(jī)器人的工作范圍,許多學(xué)者都將工作空間作為機(jī)器人設(shè)計(jì)優(yōu)化的主要優(yōu)化目標(biāo)之一。工作空間是否合理直接影響碼垛機(jī)器人的整體性能和碼垛機(jī)器人的制造成本[1-3]。
針對(duì)四自由度碼垛機(jī)器人的工作空間,許多學(xué)者進(jìn)行了多方面研究。文獻(xiàn)[4]用數(shù)值方法對(duì)TH50碼垛機(jī)器人的工作空間進(jìn)行了求解分析,提出了機(jī)器人工作空間影響系數(shù)的概念;文獻(xiàn)[5]分析了IRB660機(jī)器人結(jié)構(gòu)參數(shù)對(duì)其工作空間的影響,并計(jì)算了相應(yīng)的影響系數(shù);文獻(xiàn)[6]從生產(chǎn)線布置方面對(duì)工作空間進(jìn)行了分析。上述研究都是圍繞碼垛機(jī)器人結(jié)構(gòu)參數(shù)變化對(duì)其工作空間幾何特征的影響進(jìn)行分析,而沒有涉及對(duì)其工作空間合理程度進(jìn)行量化分析評(píng)價(jià)。
本文提出用四自由度碼垛機(jī)器人實(shí)際工作空間的空間利用率及左側(cè)輪廓線斜率絕對(duì)值對(duì)該機(jī)器人的工作空間合理程度進(jìn)行量化評(píng)價(jià),可以在設(shè)定任務(wù)空間的條件下直觀、快速地判斷給定的實(shí)際工作空間的合理程度,為四自由度碼垛機(jī)器人的結(jié)構(gòu)優(yōu)化設(shè)計(jì)提供參考。
1 運(yùn)動(dòng)學(xué)建模及工作空間分析
1.1 結(jié)構(gòu)分析
碼垛機(jī)器人結(jié)構(gòu)示意圖如圖1所示。該碼垛機(jī)器人具有4個(gè)自由度及多個(gè)局部閉鏈,主要由腰部、大臂、小臂、腕部等組成,由下連桿、上連桿、連接三角與大臂、小臂、腕部組成2個(gè)平行四邊形保證腕部機(jī)械接口始終水平,同時(shí)將小臂電機(jī)下移,與大臂電機(jī)對(duì)稱放置,既增加了整個(gè)臂部的剛度,又具有行程放大功能。

1.腰身 2.大臂 3.小臂 4.腕部 5.小臂驅(qū)動(dòng)臂6.小臂驅(qū)動(dòng)連桿 7.下連桿 8.連接三角 9.上連桿 10.底座
1.2 運(yùn)動(dòng)學(xué)方程建立
針對(duì)上述碼垛機(jī)器人,采用D-H參數(shù)法建立運(yùn)動(dòng)學(xué)模型[7]。
建立整個(gè)碼垛機(jī)器人的D-H坐標(biāo)系,如圖2所示,0坐標(biāo)系原點(diǎn)為底盤與腰部旋轉(zhuǎn)軸線交點(diǎn),5坐標(biāo)系原點(diǎn)為腕部機(jī)械接口中心點(diǎn),與之相對(duì)應(yīng)的碼垛機(jī)器人的結(jié)構(gòu)參數(shù)見表1所列。

圖2 碼垛機(jī)器人機(jī)械臂機(jī)構(gòu)及其桿件坐標(biāo)

iαi-1ai-1diθi關(guān)節(jié)轉(zhuǎn)角工作范圍100d1θ1±165°2-90°a10θ2-130°~-5°30a20θ325°~155°40a30θ4從動(dòng)5-90°a4d5θ5±300°
表1中,θi為連桿轉(zhuǎn)角,即關(guān)節(jié)變量;αi-1為連桿扭角;ai-1為連桿i-1長(zhǎng)度;di為沿關(guān)節(jié)i軸線2條公垂線之間的距離。
廣義連桿齊次變換矩陣通式為:

記Ai為從第i坐標(biāo)系到第i-1坐標(biāo)系的齊次變換矩陣,機(jī)器人底座與末端執(zhí)行器之間的總變換矩陣為
(1)
將表1中數(shù)據(jù)帶入(1)式,得到腕部末端位置矢量P=(px,py,pz)T,有
(2)
其中,s23=sin(θ2+θ3);c23=cos(θ2+θ3)。
1.3 工作空間分析
工作空間是機(jī)器人正常工作時(shí)腕部機(jī)械接口所連接末端執(zhí)行器能達(dá)到的最大范圍,它是衡量機(jī)器人性能的重要工作指標(biāo),反映了末端執(zhí)行器的活動(dòng)范圍。
根據(jù)大臂、小臂、關(guān)節(jié)轉(zhuǎn)角的工作范圍以及關(guān)節(jié)干涉約束條件θ2+θ3∈(-20°,120°),得到大臂、小臂關(guān)節(jié)的工作范圍示意圖,如圖3所示,其中由1~6線段圍成的區(qū)域?yàn)榇蟊邸⑿”坳P(guān)節(jié)轉(zhuǎn)角的實(shí)際工作范圍。
根據(jù)關(guān)節(jié)轉(zhuǎn)角實(shí)際工作范圍的邊界,結(jié)合運(yùn)動(dòng)方程可計(jì)算得到碼垛機(jī)器人在XOZ截面上的工作空間邊界,碼垛機(jī)器人在XOZ截面上的工作空間是由6段弧線圍成的封閉區(qū)域,如圖4所示。該6段弧線中第1段線為實(shí)際工作空間的上方輪廓線,第2段線為實(shí)際工作空間的右側(cè)輪廓線,第3段線為實(shí)際工作空間的下方輪廓線,第4段線、第5段線和第6段線按自下而上依次聯(lián)接構(gòu)成實(shí)際工作空間的左側(cè)輪廓線;6段弧線的形成分別對(duì)應(yīng)圖3中碼垛機(jī)器人關(guān)節(jié)轉(zhuǎn)角實(shí)際工作范圍中的第1~6條線段。
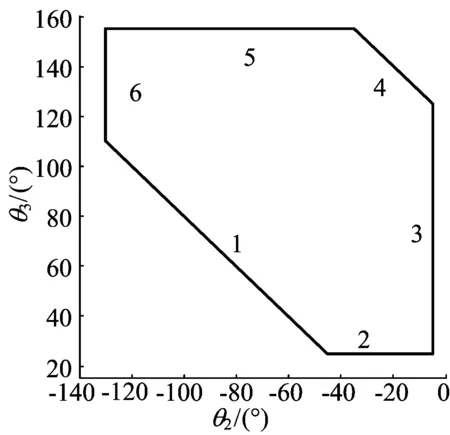
圖3 碼垛機(jī)器人大臂小臂關(guān)節(jié)轉(zhuǎn)角實(shí)際工作范圍

圖4 碼垛機(jī)器人工作空間在XOZ平面的投影
2 量化評(píng)價(jià)方法
2.1 矩形任務(wù)空間確定
根據(jù)給定機(jī)器人末端執(zhí)行器的n個(gè)工作點(diǎn)可確定包容這n個(gè)工作點(diǎn)的最小長(zhǎng)方體,如圖5所示。該給定最小長(zhǎng)方體的尺寸為l1×l2×l3,且在圖1的D-H坐標(biāo)中關(guān)于X0O0Z0平面前后對(duì)稱。L為工作空間在XOZ平面投影(見圖4)內(nèi)第4段、第5段、第6段弧線在X軸方向的最大值。

圖5 給定任務(wù)空間立體圖
空間內(nèi)分析長(zhǎng)方體與工作空間的位置關(guān)系過于復(fù)雜[8],本文將空間問題轉(zhuǎn)化為平面問題,將最小長(zhǎng)方體任務(wù)空間轉(zhuǎn)化為子午面內(nèi)矩形任務(wù)空間,大大降低了工作空間的分析評(píng)價(jià)難度。
最小長(zhǎng)方體任務(wù)空間在X0O0Y0平面的投影如圖6所示,其參數(shù)存在如下關(guān)系:
(3)

(4)

圖6 給定任務(wù)空間與實(shí)際任務(wù)空間在XOY平面投影
通過(4)式可以將最小長(zhǎng)方體任務(wù)空間轉(zhuǎn)換為子午面內(nèi)矩形任務(wù)空間,如圖7所示。該矩形任務(wù)空間的尺寸為l×h,通過轉(zhuǎn)換即可將三維空間的位置關(guān)系分析轉(zhuǎn)換為在子午面內(nèi)對(duì)矩形任務(wù)空間與碼垛機(jī)器人工作空間的位置關(guān)系分析。子午面均可通過XOZ平面旋轉(zhuǎn)得到,即可在XOZ平面進(jìn)行對(duì)比分析。

圖7 矩形任務(wù)空間與子午面在XOZ位置圖
2.2 評(píng)價(jià)方法
根據(jù)用戶提出的最小長(zhǎng)方體任務(wù)空間轉(zhuǎn)化為矩形任務(wù)空間,評(píng)價(jià)四自由度碼垛機(jī)器人實(shí)際工作空間合理程度的步驟如下:
(1) 將各實(shí)際工作空間與矩形任務(wù)空間進(jìn)行比較,將各實(shí)際工作空間中不能完全包含矩形任務(wù)空間的實(shí)際工作空間排除,能夠完全包含矩形任務(wù)空間的實(shí)際工作空間進(jìn)行步驟(2)的比較。
(2) 記矩形任務(wù)空間的面積為Sr、實(shí)際工作空間的面積為Sw,以空間利用率H作為四自由度碼垛機(jī)器人的實(shí)際工作空間合理程度的第1評(píng)價(jià)指標(biāo),H越大說明四自由度碼垛機(jī)器人的實(shí)際工作空間越合理。H的計(jì)算公式為:
(5)
當(dāng)各實(shí)際工作空間的H相等時(shí)進(jìn)行步驟(3)的比較。
(3) 記圖4碼垛機(jī)器人在XOZ平面投影中第4段和第6段曲線X軸方向最大值分別為maxx4、maxx6,對(duì)應(yīng)點(diǎn)的Z軸方向數(shù)值為z4、z6,以左側(cè)輪廓線斜率絕對(duì)值K作為四自由度碼垛機(jī)器人的實(shí)際工作空間合理程度的第2評(píng)價(jià)指標(biāo),K越大說明實(shí)際工作空間的左側(cè)輪廓線傾斜程度越小,四自由度碼垛機(jī)器人的實(shí)際工作空間越合理,其中左側(cè)輪廓線斜率絕對(duì)值為:
(6)
3 應(yīng)用案例
3.1 應(yīng)用案例1
用戶提出一個(gè)最小長(zhǎng)方體任務(wù)空間,轉(zhuǎn)化為子午面內(nèi)矩形任務(wù)空間后其尺寸為l=1 250 mm,h=1 500 mm,分別按D-H法對(duì)給定2個(gè)型號(hào)的四自由度碼垛機(jī)器人建立坐標(biāo)系。取這2個(gè)四自由度碼垛機(jī)器人在坐標(biāo)系中XOZ截面上的工作空間為實(shí)際工作空間1和實(shí)際工作空間2,如圖8所示。
評(píng)價(jià)方法步驟如下:
(1) 在XOZ截面上按照平行于X軸和Z軸的方向移動(dòng)矩形任務(wù)空間,如圖9所示,分別將矩形任務(wù)空間4個(gè)頂點(diǎn)Ⅰ、Ⅱ、Ⅲ、Ⅳ的坐標(biāo)值與實(shí)際工作空間1、實(shí)際工作空間2對(duì)應(yīng)的輪廓線上的離散點(diǎn)坐標(biāo)值進(jìn)行比較,可知實(shí)際工作空間1和實(shí)際工作空間2可以完全包含矩形任務(wù)空間。
(2) 計(jì)算得實(shí)際工作空間1的空間利用率H=51%,實(shí)際工作空間2的空間利用率H=62%(見圖9),由此可知,針對(duì)用戶提出的該矩形任務(wù)空間,實(shí)際工作空間2比1的空間利用率大,判斷為實(shí)際工作空間2比實(shí)際工作空間1更合理。

圖8 2款碼垛機(jī)器人工作空間在XOZ平面的投影

圖9 2款碼垛機(jī)器人工作空間利用率的對(duì)比
3.2 應(yīng)用案例2
用戶提出一個(gè)最小長(zhǎng)方體任務(wù)空間,轉(zhuǎn)化為子午面內(nèi)矩形任務(wù)空間后其尺寸為l=1 250 mm,h=1 500 mm,分別按D-H法對(duì)給定2個(gè)型號(hào)的四自由度碼垛機(jī)器人建立坐標(biāo)系。取這2個(gè)四自由度碼垛機(jī)器人在坐標(biāo)系中XOZ截面上的工作空間為對(duì)應(yīng)四自由度碼垛機(jī)器人的實(shí)際工作空間3和實(shí)際工作空間4,如圖10所示。

圖10 2款碼垛機(jī)器人工作空間在XOZ平面的投影
評(píng)價(jià)方法步驟如下:
(1) 在XOZ截面上按照平行于X軸和Z軸的方向移動(dòng)矩形任務(wù)空間,如圖11所示,分別將矩形任務(wù)空間4個(gè)頂點(diǎn)Ⅰ、Ⅱ、Ⅲ、Ⅳ的坐標(biāo)值與實(shí)際工作空間3、實(shí)際工作空間4對(duì)應(yīng)的輪廓線上的離散點(diǎn)坐標(biāo)值進(jìn)行比較,可知實(shí)際工作空間3和實(shí)際工作空間4可以完全包含矩形任務(wù)空間。

圖11 2款碼垛機(jī)器人工作空間利用率及左側(cè)輪廓偏移率對(duì)比
(2) 計(jì)算得知實(shí)際工作空間3和實(shí)際工作空間4的空間利用率相等,均為H=51%。
(3) 計(jì)算實(shí)際工作空間3的左側(cè)輪廓線斜率絕對(duì)值K=5.312 2,實(shí)際工作空間4的左側(cè)輪廓線斜率絕對(duì)值K=496.712 9(見圖9),由此可知,針對(duì)用戶提出的該矩形任務(wù)空間,實(shí)際工作空間4比3的左側(cè)輪廓線斜率絕對(duì)值大,判斷為實(shí)際工作空間4比實(shí)際工作空間3更加合理。
4 結(jié) 論
(1) 本文將最小長(zhǎng)方體任務(wù)空間轉(zhuǎn)化為子午面內(nèi)的矩形任務(wù)空間,大大簡(jiǎn)化了工作空間分析評(píng)價(jià)及機(jī)器人結(jié)構(gòu)參數(shù)設(shè)計(jì)的難度。
(2) 提出了一種四自由度碼垛機(jī)器人工作空間合理程度的量化評(píng)價(jià)方法,可以從空間利用率及左側(cè)輪廓線斜率等方面對(duì)機(jī)器人工作空間合理程度進(jìn)行量化評(píng)價(jià),為機(jī)器人結(jié)構(gòu)的設(shè)計(jì)及優(yōu)化提供了便利。
[1] 張立杰,牛躍偉,李永泉.球面二自由度冗余驅(qū)動(dòng)并聯(lián)機(jī)器人可達(dá)工作空間的分析[J].中國機(jī)械工程,2009,20(24):2974-2978.
[2] GOSSELIN C M.Simulation and computer-aided kinematic design of three-degree-of-freedom spherical parallel manipulators[J].Journal of Robotic Systems,1995,12(12):857-869.
[3] 畢諸明,吳瑞珉,蔡鶴皋.工業(yè)機(jī)器人的工作空間綜合[J].機(jī)器人,1994,16(3):181-184.
[4] 李金泉.碼垛機(jī)器人機(jī)械結(jié)構(gòu)與控制系統(tǒng)設(shè)計(jì)[M].北京:北京理工大學(xué)出版社,2011.
[5] 朱素霞.IRB660型碼垛機(jī)器人的運(yùn)動(dòng)學(xué)與動(dòng)力學(xué)分析[D].北京:北京郵電大學(xué),2013.
[6] ZHANG L,MEI J,ZHAO X,et al.Layout analysis and path planning of a robot palletizing production line[C]//IEEE International Conference on Automation and Logistics.[S.l]:IEEE,2008:2420-2425.
[7] 夏鏈,俞曉慧,韓江,等.基于UMAC的工業(yè)機(jī)器人運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)[J].合肥工業(yè)大學(xué)學(xué)報(bào)(自然科學(xué)版),2015,38(8):1009-1012,1090.
[8] 甘屹,王均壘,孫福佳.基于給定工作空間的6R型機(jī)器人D-H參數(shù)優(yōu)化設(shè)計(jì)[J].中國機(jī)械工程,2014,25(22):3003-3007,3011.
(責(zé)任編輯 胡亞敏)
Quantitative evaluation of working space rational degree of stacking robot and its application
YAN Peilei, LU Jianwei, MA Shuquan
(School of Automobile and Traffic Engineering, Hefei University of Technology, Hefei 230009, China)
A method for quantitative evaluation of working space rational degree of 4-DOF stacking robot was presented. The smallest cuboid task space was transformed into meridian plane rectangular task space in the robot coordinate system established by D-H method. A method to evaluate the working space of the robot using the working space utilization rate and the absolute value of left profile slope was proposed through the comparison of the deviation between the actual working space of the robot and the rectangular task space. The effectiveness of the evaluation method was verified through examples. The proposed method is helpful for the structure design and optimization of 4-DOF stacking robot.
stacking robot; working space; task space; space utilization rate; quantitative evaluation
2016-01-28;修回時(shí)間:2016-02-24
教育部新世紀(jì)優(yōu)秀人才支持計(jì)劃資助項(xiàng)目(NCET-10-0358)
燕培磊(1988-),男,河北元氏人,合肥工業(yè)大學(xué)碩士生; 盧劍偉(1975-),男,山東青州人,博士,合肥工業(yè)大學(xué)教授,博士生導(dǎo)師,通訊作者,E-mail:jwlu75@163.com.
10.3969/j.issn.1003-5060.2017.07.004
TH122;TH242.2
A
1003-5060(2017)07-0883-05
猜你喜歡
石油瀝青(2021年4期)2021-10-14 08:50:44
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2021年10期)2021-03-02 05:52:06
現(xiàn)代檢驗(yàn)醫(yī)學(xué)雜志(2016年3期)2016-11-15 01:59:56
中學(xué)語文(2015年21期)2015-03-01 03:52:11
中國教育技術(shù)裝備(2015年19期)2015-03-01 02:43:07
中國工程咨詢(2015年2期)2015-02-14 02:59:26
西南軍醫(yī)(2015年1期)2015-01-22 09:08:16
中國音樂教育(2014年9期)2014-05-20 10:26:24
治淮(2013年1期)2013-03-11 20:05:18
俄羅斯問題研究(2012年1期)2012-03-25 09:54:51
