浮空雷達高精度探測分析
2017-08-12 15:27:40郭法濱
合肥工業大學學報(自然科學版) 2017年7期
關鍵詞:測量
朱 勇, 郭法濱
(中國電子科技集團公司第三十八研究所 孔徑陣列與空間探測安徽省重點實驗室,安徽 合肥 230088)
?
浮空雷達高精度探測分析
朱 勇, 郭法濱
(中國電子科技集團公司第三十八研究所 孔徑陣列與空間探測安徽省重點實驗室,安徽 合肥 230088)
浮空雷達探測精度主要受平臺姿態變化引起的定位誤差和傳感器自身的探測誤差影響。文章針對2類誤差的影響因素進行了分析,提出了采用寬信號發射波形和高精度定位的方法來降低雷達探測誤差,結合高精度船舶自動識別系統(automatic identification system,AIS)信息自動校準進行誤差補償,實現浮空雷達高精度探測。工程實測數據分析表明,該方法取得了較好的效果。
浮空雷達;高精度探測;誤差校準;船舶自動識別系統(AIS)
0 引 言
浮空雷達系統是以飛艇、系留氣球等浮空器為載體,將雷達天線系統、發射機、接收機升至幾百到幾萬米的空中,使其不受地球曲率、遮蔽物和地面氣流的影響,具有較強的低空探測能力,尤其是對超低空飛行的小目標,甚至巡航導彈都具有相當好的探測能力[1-3]。浮空器雷達正以其低空探測能力好、留空時間長、使用效費比高等優點在國土防空探測網絡中扮演著越來越重要的角色。
由于浮空平臺懸浮在高空,受氣流影響,平臺始終處于運動狀態,航向、姿態等一直變化,導致所搭載雷達的系統誤差隨之變化,影響了雷達對目標探測的性能[4]。本文針對該實際問題,從浮空雷達目標探測誤差分析入手,對減小和校正系統誤差、提高浮空雷達探測精度進行了探討。
1 浮空雷達目標探測誤差分析
雷達對目標的探測精度主要受2種類型的誤差影響,即隨機誤差和系統誤差[5-8]。隨機誤差可以通過各種濾波技術進行消除;而系統誤差是一種確定性的誤差,無法通過濾波方法去除,本文主要針對浮空雷達的系統誤差進行分析。
浮空雷達的系統誤差主要包括:① 雷達測量系統誤差,主要是雷達本身因技術體制局限、設計缺陷、器件老化等引起的測量偏差,主要包括測距偏差、測向偏差等;② 浮空平臺定位誤差,主要是由平臺導航系統的偏差引起的,包括對平臺的位置、姿態(俯仰、橫滾、航向)等的測量偏差。
1.1 雷達測量系統誤差
(1)
其中,r、θ、ε分別為雷達對目標距離、方位、仰角的測量值;rt、θt、εt為相應的真值;Δr、Δθ、Δε分別為雷達對目標距離、方位、仰角的測量誤差。傳感器測量誤差可以表示為偏差常量加上隨機噪聲,因此傳感器的距離、方位角和仰角的測量誤差可以分別表示為:
(2)
其中,Δrb、Δθb、Δεb分別為相應的高斯白噪聲;Δrn、Δθn、Δεn分別為相應的測量偏差。
雷達測量得到的距離、方位和俯仰三維坐標轉換到地理坐標系的關系如下:
(3)
在誤差較小的情況下,對傳感器測量誤差進行一階泰勒展開,即
G(r-Δr,θ-Δθ,ε-Δε)=

(4)
其中
1.2 浮空平臺定位誤差
近年來,中央及各地政府機構加大財政投入,加強資源整合,在農村地區開展衛生治理、村莊環境建設、道路修建等一系列基礎建設工作,使得鄉村呈現出天藍、水綠、村民安居樂業的美好景象。
平臺地理坐標系轉換為地心地固(earth centered earth fixed,ECEF)直角坐標系,結果如下:
(5)
其中,B、L、H分別為經度、緯度、高度;C的表達式為:
(6)
其中,Eq為地球祁有球的長半軸;e為第一偏心率。
平臺定位偏差較小時,在地理坐標系下,對傳感器平臺偏差進行泰勒一階展開分析,即
F(B-ΔB,L-ΔL,H-ΔH)≈
(7)
其中
JF=

(8)
則有
(9)
假設Δz=0,目標位置為x、y,則平臺定位誤差引起的測距偏差為:
-Δxsinθ-Δycosθ
(10)

平臺定位誤差引起的測向偏差為:
(11)
2 誤差校準
雷達系統存在的隨機誤差和系統誤差,使雷達探測到的目標位置偏離了目標的真實位置。因此,必須對雷達系統偏差進行實時在線估計,并對航跡數據進行誤差補償,即系統誤差校準。如果存在目標高精度定位數據,那么可以借助同一個目標的高精度定位值和雷達帶有誤差的探測值來估計雷達的系統偏差。
(12)
(13)

E(ΔRs)=E(ΔRs)=ΔRs;
E(Δθs)=E(Δθs)=Δθs
(14)
當點數足夠多時,有
E(ΔRs)=ΔRs,
E(Δθs)=Δθs
(15)
當樣本數足夠多時,雷達測量值與目標的高精度值之差的樣本均值趨于雷達的系統偏差。
3 高精度測量
由上文分析可知,雷達測量系統誤差主要是由雷達本身引起的,提高雷達本身性能(如減少距離分辨單元內的雜波、提高信雜比),采用更高的帶寬信號發射波形,減小距離分辨單元以提高距離分辨和測距精度,都能減小雷達系統自身的測量誤差,實現浮空雷達目標檢測距離精度的提高。測量誤差為:
(16)

不同的帶寬發射波形影響如圖1所示。其中,圖1a瞬時工作帶寬為2.5 MHz,圖1b瞬時工作帶寬為10 MHz。由圖1可知,瞬時工作帶寬提升4倍,則雜波等效面積降低至原來的1/4。
浮空平臺定位誤差主要受平臺定位精度影響,可以設計采用高精度定位測量設備有效降低浮空平臺定位誤差,以提高浮空雷達對目標檢測的精度。
浮空雷達裝配的高精度設備如船舶自動識別系統(automotic identification system,AIS)等可以接收海面目標包括經度、緯度、高度等信息。由于AIS信息中船舶位置精度可達米級[9],將其位置信息坐標轉換,轉化為浮空雷達坐標系下的位置,包括距離、方位、高度等信息與雷達探測的目標位置信息進行融合校準。利用AIS融合功能,根據基于多因素量化匹配的海面目標AIS點跡與雷達航跡融合相關算法,將AIS位置信息與一次雷達海面目標航跡進行配對,綜合多批多幀數據后統計和計算雷達的系統誤差和標準差,實時自動校正一次雷達系統誤差,提高測量精度。

圖1 不同帶寬發射波形影響
將上述方法應用于某型雷達,通過實測數據分析得到的結果如圖2所示。
從圖2可以看出,應用本文方法后,浮空雷達的探測精度得到了提升,將雷達探測獲取的距離和方位值與高精度差分GPS獲取的目標距離和方位真值進行比較發現,兩值基本吻合;計算距離和方位測量誤差可以得到,距離探測誤差降至25.5 m,方位測量誤差降至0.192°。
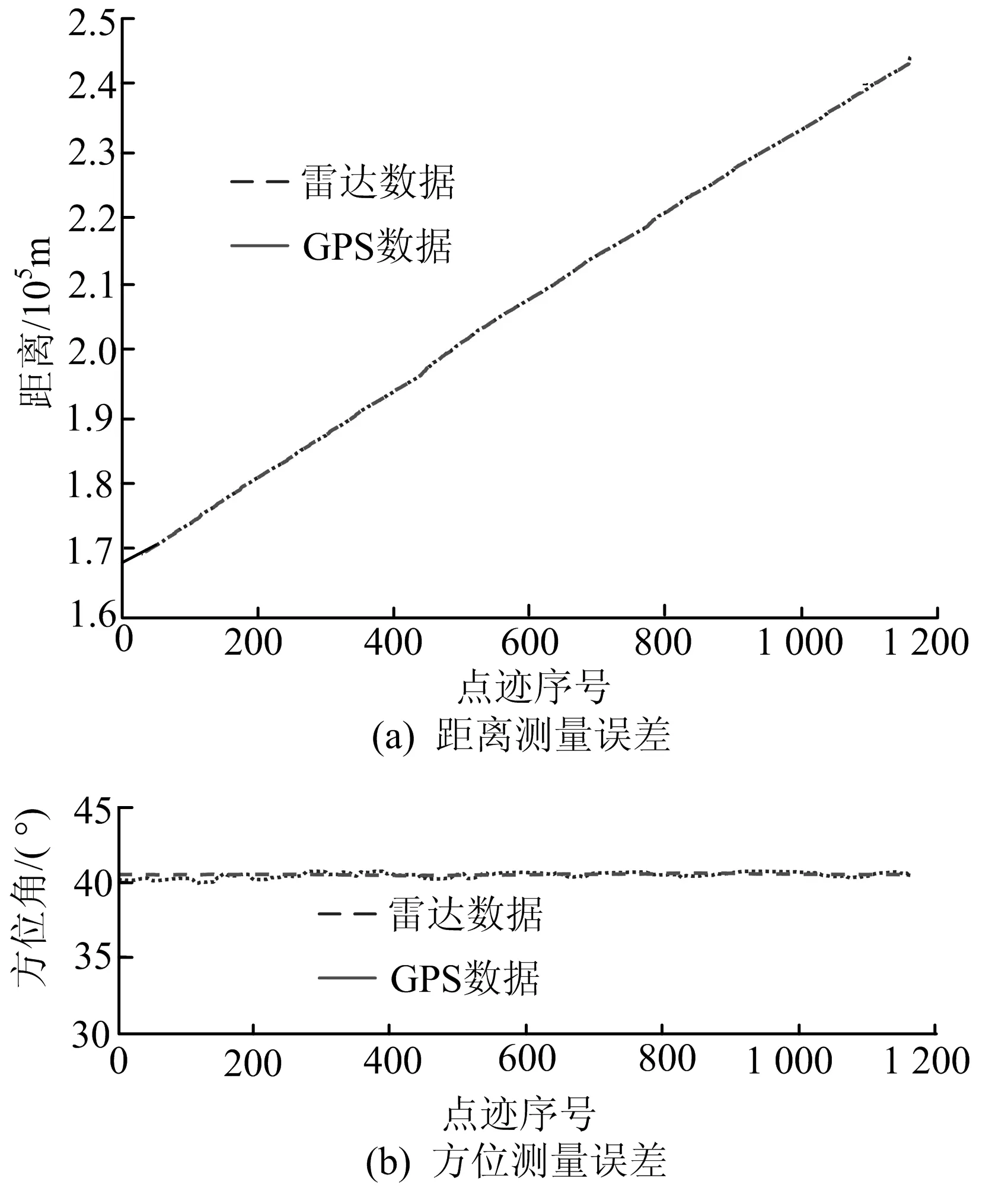
圖2 某浮空雷達實測距離誤差和實測方位誤差
4 結 論
由于浮空平臺受氣流影響,其航向、姿態等一直變化,導致所搭載雷達的系統誤差隨之變化,影響了雷達目標的探測性能。本文對影響浮空雷達探測精度的系統誤差和平臺誤差進行了分析,提出了一種減小系統誤差和誤差自動校準的方法,并在某型雷達上成功應用。測量結果表明,該方法有效地提高了浮空雷達的探測精度。
[1] 于君.漂浮的電眼:美軍浮空器雷達探秘[J].國防展望,2005(517):32-34.
[2] 王聞喆,吳冰,李小璐,等.一種浮空平臺雷達伺服系統的設計[J].現代雷達,2016,38(8):64-69.
[3] 盧斌,王斌,吳兆彬,等.美軍JLENS系統研制現狀綜述[J].飛航導彈,2013(5):50-54.
[4] 羅敏.浮空器雷達載荷發展淺析[J].現代雷達,2010,32(6):14-16.
[5] 何友,修建娟,張晶煒,等.雷達數據處理及應用[M].北京:電子工業出版社,2006:215-223.
[6] 韓崇昭,朱紅艷,段戰勝,等.多源信息融合[M].北京:清華大學出版社,2006:171-188.
[7] HALL D L,LLINAS J.Handbook of multisensor data fusion [M].The Electrical Engineering and Applied Signal Processing Series.Boca Raton,Florida:CRC Press,2001:102-128.
[8] LIN X D,BAR-SHALOM Y,KIRUBARAJAN T.Multisensor multitarget bias estimation for general asynchronous sensors[J].IEEE Transactions on Aerospace and Electronic Systems,2005,41(3):899-921.
[9] 任文娟,周志鑫,呂守業.基于AIS信息的艦船位置標校方法[J].系統工程與電子技術,2016,38(10):2381-2388.
(責任編輯 胡亞敏)
Analysis of high precision detection for aerostat-borne radar
ZHU Yong, GUO Fabin
(Key Laboratory of Aperture Array and Space Application, No.38 Research Institute of China Electronics Technology Group Corporation, Hefei 230088, China)
The detection performance of the aerostat-borne radar suffers from the aerostat platform positioning biases and sensor’s detecting biases. The effect of these two kinds of biases is analyzed and the high precision detection method is presented. The technique adopts the transmit waveform of the wideband signals and employs the high precision location to reduce the error of radar detection, where the automatic identification system(AIS) automatic calibration is used for error compensation. The results of processing engineering application measurement data show that this method is effective.
aerostat-borne radar; high precision detection; error compensation; automatic identification system(AIS)
2017-01-15;
2017-02-28
朱 勇(1975-),男,安徽潛山人,中國電子科技集團第三十八研究所高級工程師; 郭法濱(1979-),男,山東泰安人,博士,中國電子科技集團第三十八研究所高級工程師,通訊作者,E-mail:guofabin@163.com.
10.3969/j.issn.1003-5060.2017.07.014
TN959.73
A
1003-5060(2017)07-0930-04
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
