數字化總裝車間智能物流配送系統的應用
2017-08-16 14:51:23盧揚揚戴勇波范秀斌
制造業自動化 2017年6期
盧揚揚,戴勇波,范秀斌
(北京星航機電裝備有限公司,北京 100074)
數字化總裝車間智能物流配送系統的應用
盧揚揚,戴勇波,范秀斌
(北京星航機電裝備有限公司,北京 100074)
航天器的裝配技術是航天制造技術的重要組成部分,基于數字化制造模式下的柔性裝配技術,是實現航天產品快速高效研制的有效途徑。針對航天產品總裝過程中要實現自動化、數字化裝配的要求,設計了基于麥克納姆輪視覺導航技術的物料配送系統,在調度管理系統路徑規劃下完成部件、成件和產品的轉運、自動對接等任務。
數字化;裝配;麥克納姆輪;自主導航;調度系統
0 引言
數字化裝配系統需要完成對部件、成件,標準件的安裝及轉運的任務。數字化裝配系統包含裝配工作站和全向智能轉運系統,裝配工作站完成產品總裝過程的生產準備及部件對接、分系統及成件安裝等工作內容。智能物流配送系統完成部件、成件及產品的轉運任務。
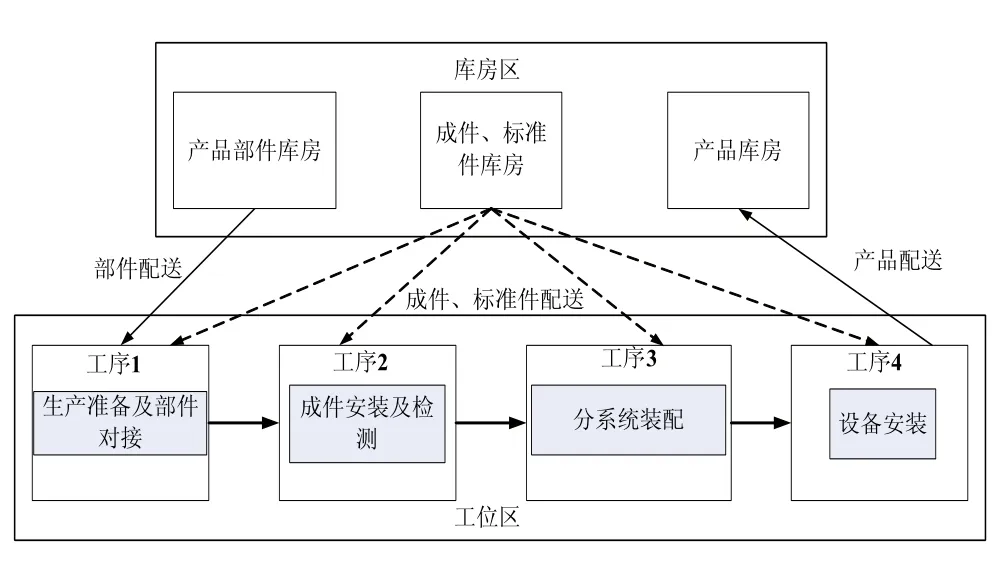
圖1 裝配系統安裝工序及物料轉運圖
數字化裝配系統從零部件出庫到產品入庫,實現了智能轉運、自動化裝配,具有以下功能:
1)數字化裝配工作臺能夠完成部件的自動對接,成件的自動裝配。
2)全向智能轉運車具有遙控和自主導航功能,庫房有三個區域即部件庫房,成件、標準件庫房和產品庫房,智能轉運車需要完成不同轉運導航功能。
3)全向智能轉運車導航到達工位處能夠完成與工位自動對接。
4)裝配工位產品實現360°自動清倉。
1 智能物流配送系統原理
智能物流配送系統包含全向智能轉運車平臺,主控調度系統,自主導航系統,安全防撞系統等,物流配送系統組成結構如圖2所示。
1)全向車智能轉運平臺包含車體及車架、控制系統、伺服驅動系統和無線遙控系統。
2)主控調度系統完成多臺車轉運調度及在線監控的功能。
3)自主導航系統通過視覺傳感器實時測量地面顏色帶的角度和偏移量,并反饋到車體控制器中。
4)自動對接系統完成車體與工位導軌的精確對接,部件及產品能夠順利渡過。
5)安全防撞系統能夠測量障礙物距離進行減速或停止。
2 全向智能轉運車平臺原理
全向智能轉運車采用麥克納姆輪設計,能夠實現前后,左右和原地旋轉的運動,既能滿足空間狹窄車間艙段及成件的轉運,又能滿足物料自主導航配送。要實現車體全方位運動必須四個麥克納姆輪組合運動完成,動力系統是通過48V200AH電池組逆變成220V給伺服驅動輪供電,其運動分析[1]如圖3所示。
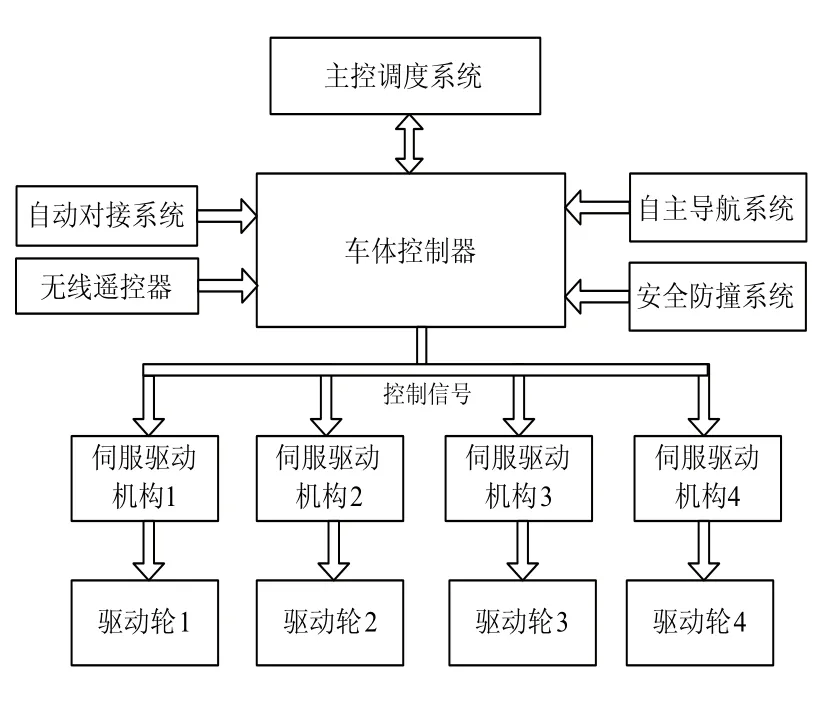
圖2 物流轉運車系統結構圖
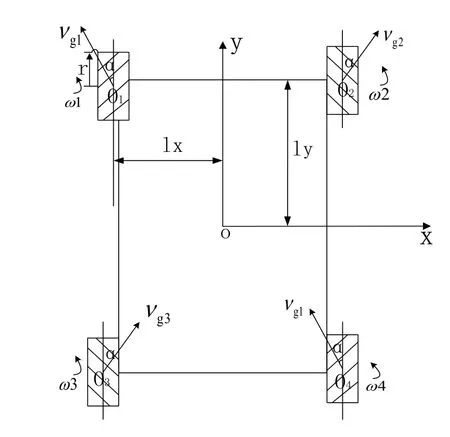
圖3 麥克納姆輪全向車結構圖
通過以車體中心為原點建立xoy坐標系,其中ω為小車以O點為中心的角速度且令順時針方向為正,v'ixv'iy為x'o'y'坐標系下點O'點的廣義速度,ωi為輪子角速度,vig為輥子(小輪)的速度,α為輥子(小輪)軸中心線與輪子的軸中心線的夾角,r為輪子半徑,得到輪轉速到中心的逆運動學公式如下:

其中r=0.2m,lx=0.75m,ly=1.4m,可得:
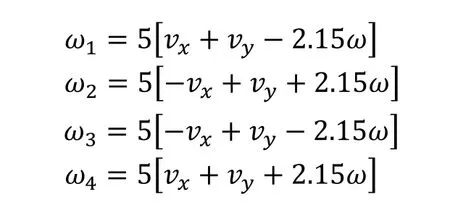
通過設定車體vx,vy,ω可以推算出個輪子的角速度,從而可以實現全方向移動。
當車體實現前進后退時,令vx=0,ω=0得出:ω1=ω2=ω3=ω4;
當車體實現左右橫移時,令vy=0,ω=0得出:ω1=-ω2=-ω3=ω4;
當車體實現原地旋轉時,令:
得出:-ω1=ω2=-ω3=ω4。
3 自主導航系統
全向智能轉運車搭載自主導航系統可以實現從庫房到工位間的自動轉運,導航系統采用視覺導航原理,通過實時上傳車體位置信息,車載控制器根據姿態實時調整車體位置,圖4為導航控制結構原理圖。
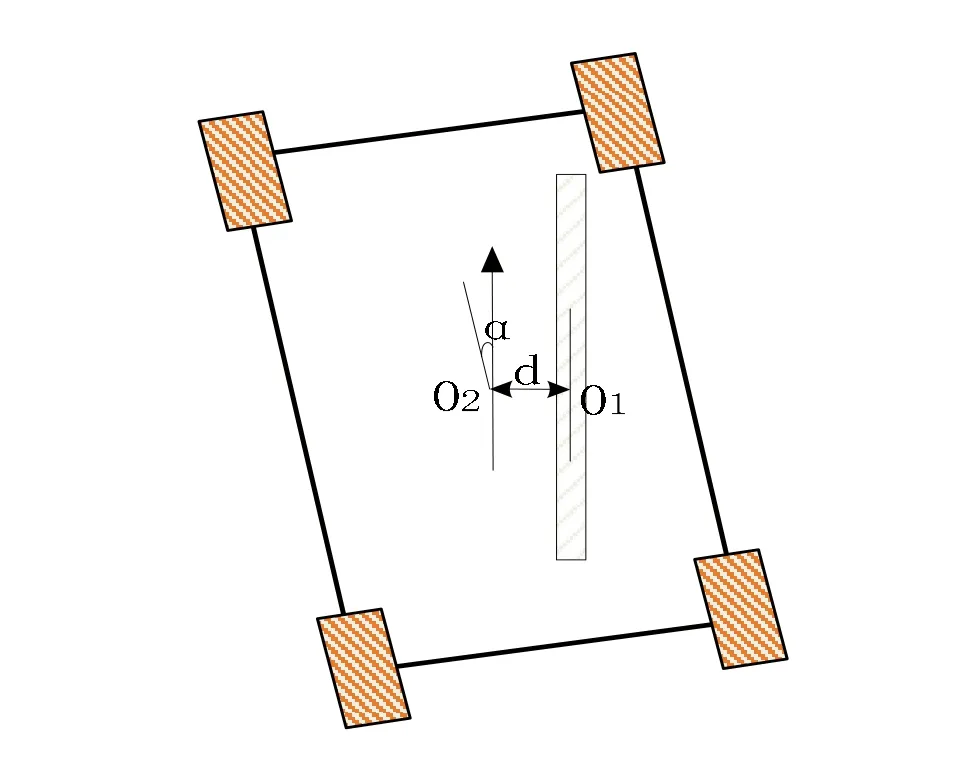
圖4 導航控制結構原理圖
視覺導航傳感器安裝在車體中心位置O2處,通過實時掃描地面顏色帶計算車體中心位置與顏色帶中心左右相對偏差值d和偏轉角度α,導航傳感器每40ms左右反饋偏差值和和角度到控制器里。
根據現場測試得出車體行走既要保證穩定又要保證精度,控制精度越高,調節頻率越大,車體易出現抖動不穩定現象,因此在控制算法中加上帶死區的PID控制[2]:
1)當d≤|4∣,α=0時,不進行調節控制;
2)當d≤∣4∣,α≠0時,只進行角度調節,左右不調節;
3)當d≥∣4∣,α=0時,只進行左右調節,角度不調節;
4)當d≥∣4∣,α≠0時,左右、角度同時進行調節;
5)當d≥∣30∣,α≥∣6∣時,超出導航控制范圍,停止運動。
根據五種情況列出程序流程圖如圖5所示。
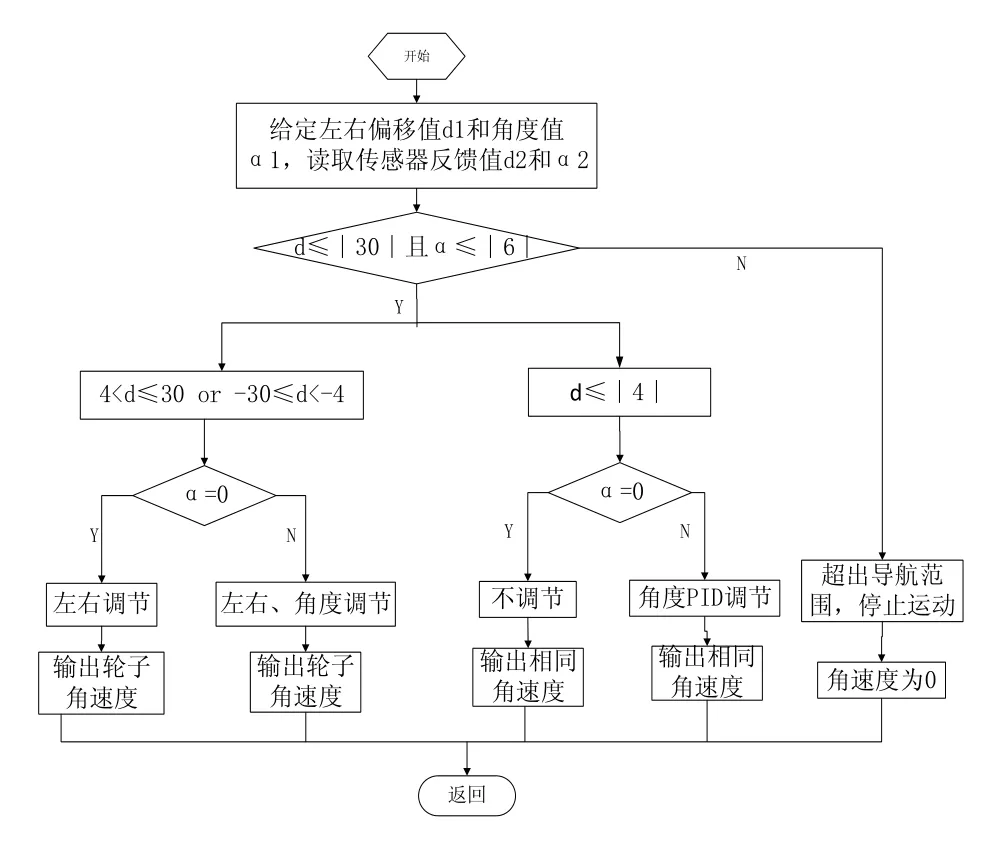
圖5 導航控制流程圖
4 自動對接系統
在轉運車導航控制站點中,部件上工位,產品下工位等需要轉運車導軌與工位到位自動對接,完成部件及產品通過導軌上工位,由于導軌對接精度需要保證在±0.5mm范圍內,目前視覺導航系統在1mm左右,因此需要輔助對接傳感器系統完成末端自動對接功能。
在車架前端安裝三個激光位移型傳感器,其中測量范圍為100±35mm,測量精度為70μm,圖6為自動對接原理圖,其中D1為傳感器1測量車架前端面到工位的距離,D2為傳感器2測量車架前端面到工位的距離,D3為傳感器3測量車架到工位側面偏移的距離,可以得出:

其中D作為車頭角度偏移誤差值,D'作為車架與工位左右偏移誤差值,根據測量角度與左右偏移誤差值來進行調節車體自轉與橫移,完成自動對接。
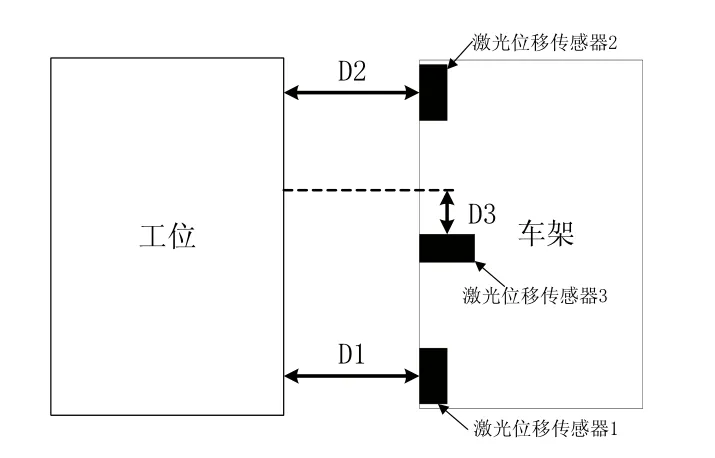
圖6 自動對接原理圖
5 主控調度系統
主控調度不僅可以對每臺轉運車進行路徑設置,還可以實時監測車達到位置,下一站點等信息。路徑設置界面中具有實際路線圖,紅色閃爍表示當前站點,點擊站點號設置為終點,啟動導航按鈕全向車開始運動,界面路徑設置圖如圖7所示。

圖7 主控調度系統路徑設置界面圖
1)部件轉運起點為1號,目的站點為5、8、9、13、15號站點。
2)成件及標準件起點為7號,停靠站點為8、9號站點。
3)產品轉運起點為15號站點,停靠站點為18~27號站點。
4)起點為黃色,當前站點顯示紅色閃爍,終點為綠色,車體移動到每個站點都可以實時監測到。
6 安全防撞系統
全向智能轉運車在轉運過程中,需要前后安裝安全防撞系統,紅外光電掃描避障傳感器選用北陽PBS-03JN,掃描角度為180°,寬度為2m,長度為0.2~3m可調,傳感器具有三路檢測輸出,每路輸出都可以設定檢測區域。
1)避障傳感器設定兩個信號輸出范圍,1.5×2m范圍為警告減速區域,0.7×2m范圍為停止區域。
2)導航過程中如遇到前后端任一傳感器到達減速區時,車體開始減速,障礙物撤離后繼續按導航速度行走。
3)當遇到障礙物在停止區域時,車體立即停止報警,直到障礙物撤離繼續導航。
7 結束語
基于麥克納姆輪的視覺導航物流配送系統經過在現場測試,得到以下結論:
1)采用顏色條與二維碼組合方式實現導航行走及轉彎;
2)滿載2t產品導航精度達到±3mm,原地轉彎精度達到±6mm;
3)轉運車與裝配工位自動對接精度左右0.5mm,偏角0.5mm,部件產品托架能夠順暢平穩度過對接區域;
4)安全防撞系統安全可靠,遇到障礙物能夠及時停止運動;
5)通過設定轉運速度,能夠滿足生產裝配節拍,調度系統路徑優化合理。
圖8為全向智能轉運車攜3m托架與工位對接現場圖片,通過現場不斷測試得出總裝數字化裝配轉運系統能夠實現無人自動化轉運,降低了勞動成本,提高了生產裝配效率,特別是對大尺寸部件產品來說具有一定的應用價值。

圖8 全向智能轉運車現場圖片
[1] 楊文軍,毛玉良.Mecanum輪移動機器人循跡控制及調度研究[D].東南大學,2014.
[2] 蔣慧略,周忠海,蔣慧.廉月仙.數字PID控制的改進算法[J].中國水運月刊,2008.06,08(6):117-118.
The intelligent logistics system research in digital fnal assembly workshop
LU Yang-yang, DAI Yong-bo, FAN Xiu-bin
TP242.2
:A
1009-0134(2017)06-0012-03
2017-01-09
盧揚揚(1986 -),男,山東棗莊人,碩士,主要從事非標裝備設計的研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
表面工程與再制造(2019年6期)2019-08-24 06:40:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
