并聯式混合動力汽車控制策略分析*
2017-08-20 06:19:20呂建美牛禮民周亞洲王儒
汽車工程師 2017年11期
呂建美 牛禮民 周亞洲 王儒
(安徽工業大學)

混合動力汽車(HEV)是在傳統汽車的基礎上配備了電動機/電池驅動系統的一種新能源汽車,是傳統汽車到純電動汽車的一種過渡車型[1]。控制策略是HEV的核心技術和設計難點,也是HEV能否實用化的關鍵。并聯式混合動力汽車(PHEV)的工作模式主要可以分為電驅動模式、發動機驅動模式、混合驅動模式、再生制動模式以及停車充電模式,這5種模式的互相切換主要依靠控制策略的控制。控制策略能夠根據駕駛員的駕駛意圖和行駛工況,協調各部件間的能量流動,合理地進行動力分配,提高行駛效率,降低汽車的燃油消耗[2]。目前HEV的控制策略主要分為基于規則和基于優化2類,這2類控制策略幾乎能夠涵蓋所有的控制策略,劃分明確。文章對這2類控制策略進行了分析和對比,并對新興的智能控制策略進行了介紹。
1 并聯式混合動力汽車
PHEV的傳動結構,如圖1所示,其主要特點是發動機和電機根據路況和扭矩的需求不同,同時或單獨驅動[3]。由于HEV發展初期技術有限,所以大多數PHEV的能量控制策略都是基于速度的控制。由于這種控制策略簡單,容易被工程師理解,所以在HEV中得到了很廣泛的應用。但是這種基于速度的控制策略也有其明顯的缺點,如控制參數單一,動態性差,不能充分利用混合動力系統的優勢,使得整車的燃油經濟性沒有達到最優。目前根據PHEV是否使用智能算法或優化算法,將其控制策略分為基于規則、基于優化以及智能控制策略3類,如圖2所示。
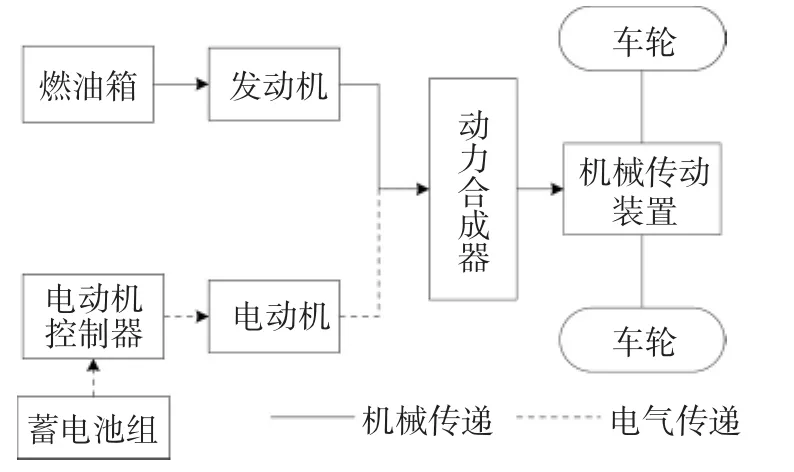
圖1 并聯式混合動力汽車的傳動結構
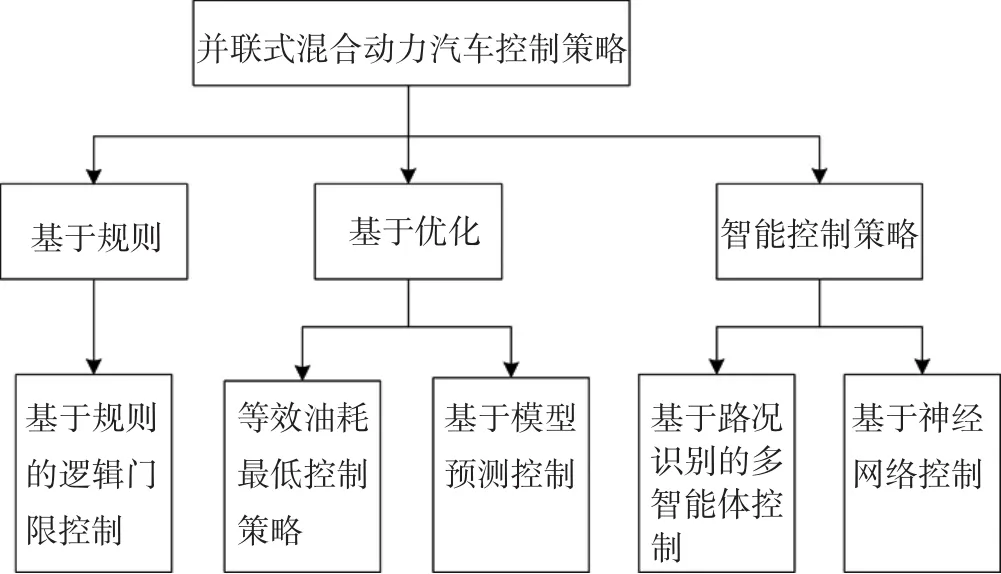
圖2 并聯式混合動力汽車控制策略分類
2 基于規則的邏輯門限控制策略
基于規則的邏輯門限控制策略的主要思想是,通過基于工程師的經驗以及發動機的靜態效率曲線圖,并選定幾個控制變量,如:電池的SOC值、整車的功率需求及燃油消耗量等,然后根據預先設定的規則,判斷并選擇混合動力系統的工作模式,使汽車盡量在高效區運行。
國內相關研究諸如,文獻[4]通過規則的邏輯門限控制策略把發動機的工作區域分為高中低負荷區,結合駕駛員油門踏板開度和開度變化率來計算當前所需求的功率并確定相應的工作區域。這種判斷方法思路簡單易懂,計算量較小,方法易于實現,但無法適應不同工況的變化和實際動態變化的需求,適應性不強。文獻[5]利用模糊邏輯控制技術,在MATLAB軟件的模糊邏輯工具箱中設計了模糊控制器,提出了一種既能夠實現需求轉矩又能在發動機和電機之間實現最優分配的模糊邏輯控制策略,在ADVISOR軟件上進行了仿真。結果表明,模糊邏輯控制策略能夠在一定程度上提高PHEV的燃油經濟性,且有良好的魯棒性。
國外研究狀況包括,文獻[6]描述了基線能量管理策略,當電池SOC值較低時,電機對電池充電。基線能量管理策略能夠降低油耗,維持電池SOC平衡,被廣泛應用于PHEV,進一步提高了控制策略的燃油經濟性并降低排放。文獻[7]把基于規則的控制策略分為聚類算法和規則定義2個階段。第1階段首先運用聚類算法生成簇集,再用最小化目標函數去識別簇集;第2階段用遺傳算法得出最佳簇集的大小,然后利用控制器進行優化。最后在一些工況上進行了測試,結果表明,汽車的燃油性得到了很好的提高,但整個控制策略的計算量很大,程序復雜。文獻[8]提出了一種動態規劃(DP)優化的控制方法,把這種方法與模糊控制策略結合。為了提高這2種結合控制策略的實用性和滿足城市駕駛模式的多樣性,提出了一種城市駕駛模式的識別方法。最后把這種控制策略與傳統基于規則的控制策略相比較。模擬結果表明,通過采用提出的控制策略,PHEV的燃油效率更高,并且在不同的城市循環期間,電池的SOC值能夠保持平衡,這種控制策略只是在城市工況下進行了測試,在其他復雜工況下的工作情況還需要進一步測試。
綜上,基于規則的邏輯門限控制策略算法簡單,易于實現,但是從最優控制理論上講,該控制規則不能實現能量的最優分配,也未考慮實際工況的動態變化。
3 瞬時優化控制策略
瞬時優化控制策略也被稱為實時控制策略,該策略的核心思想是在汽車行駛的每個瞬時時刻,計算所有滿足駕駛員需求的發動機和電動機的輸出轉矩組合以及所對應的燃油消耗量和電力消耗量,將該瞬時燃油消耗表示為發動機燃油消耗的等效燃油消耗。瞬時優化控制策略一般分為等效油耗最低控制策略(ECMS)和基于模型預測的控制策略。
3.1 等效油耗最低控制策略(ECMS)
ECMS要求將電動機的能量損耗轉換為等效的發動機油耗,得到類似于發動機萬有特性圖的電動機損耗圖[9]。目前常用的ECMS包括基于SOC變化量和基于工作效率2種。
國內學者對ECMS進行了進一步的研究。文獻[10]提出當車載蓄電池組的SOC值達到設定的SOClow時,發電機開始工作,得到消耗的電能與發動機未來時刻補償這些能量而消耗的燃油之間的等價關系,再對每一時刻發動機實際消耗的燃油與電池等效燃油消耗的總和進行優化,讓它們達到最低值。雖然采用ECMS時,可以獲得良好的燃油經濟性并提高整車性能,但是該研究所針對的行駛工況只是城市生活中日常上下班的短途行駛兼顧偶爾長途旅行,并不能適應于所有工況。文獻[11]從另一個角度出發,利用ADVISOR軟件建立瞬時油耗計算的重要參數模型,分析出最佳的瞬時油耗優化表達式,用再生制動對電池電能補償效應進行修正,建立瞬時ECMS的目標函數,最后在ADVISOR軟件對其進行驗證。雖然驗證結果表明采用該方法得出的瞬時等效油耗精度較高,參數計算較準確,但該算法還需要在實車上進行測試,才能驗證其真實可行性。
國外研究者也對ECMS進行了改進。文獻[12]建立了基于工作效率的等效油耗模型,根據發動機、電機與電池的平均工作效率以及當前時間步長的實時工作效率來計算在電池充放電情況下的電機等效油耗。文獻[13]依據發動機燃油消耗、電機扭矩和SOC變化量三者的關系推導出對應電機扭矩的等效油耗,并考慮電池充放電損失和制動再生電能的影響,建立了基于SOC變化量的等效油耗模型。文獻[14]把ECMS應用到PHEV的巡航模式,并且提出了一種基于模型預測控制(MPC)的新型燃油消耗優化算法,該算法可以使汽車在巡航模式下減少計算量,降低車的燃油消耗。文獻[15]將ECMS與邏輯門限策略相結合,形成自適應能量管理策略,這樣不僅能縮短仿真時間、維持電池SOC穩定,還能有效地改善汽車的燃油經濟性和排放性。
結合國內外的研究可知,ECMS不需要預先知道工況情況,計算量較小,能夠有效節省PHEV的油耗,且便于對能量進行控制,擁有較好的應用前景,但無法兼顧到全局最優,且容易受到電池老化的影響,在實際汽車控制中的實現難度較大。
3.2 基于模型預測的控制策略
基于模型預測的控制策略指根據預測的模型對未來系統代價函數進行預測,通過對未來預測區間內的性能指標進行優化,并根據實測對象的輸出進行反饋校正,將控制策略轉化為優化過程,通過求解相應預測區間的優化問題得到控制序列,并將序列的第1個控制量作用于系統,實現反饋控制,在下一個采樣時刻,將預測區間向前推進一步,之后不斷重復該過程。
國內方面,文獻[16]基于車載導航系統建立汽車未來一段行駛路線上的汽車運行狀態模型,將模型預測控制與動態規劃相結合,建立了中度HEV的燃料經濟性預測控制計算模型,最后運用C語言與MATLAB/Simulink進行聯合仿真,驗證了所建立的算法可以滿足實時控制的要求,且采用該預測控制策略的中度HEV具有顯著的節油效果。文獻[17]把模型預測控制與最優控制策略相結合,得出PHEV能量管理模型預測最優控制策略。先確定發動機最優工作線,再運用所建立的數學模型和公式化控制策略求解最優控制問題,最后把求得的最優控制序列的第1個控制量應用在系統中。這2種方法都可以實現汽車在行駛過程中的優化控制,顯著提高汽車的燃油經濟性,但都只是在仿真軟件中進行了模擬,并沒有得到實際的驗證。
國外方面,文獻[18]以HEV應用的基于模型預測的控制策略為基礎,介紹了模型預測的方法并討論了其優點,提出了可能影響模型預測控制策略的因素,包括預測精度、設計參數及求解器等。基于模型預測的控制策略在很大程度上提高了動態規劃的計算效率,能顯著提高燃油經濟性,但是其算法的魯棒性不強。
綜上所述,瞬時優化控制策略不需要提前知道整個行車工況,計算量比較小,且實時性更高,但是瞬時優化控制策略無法實現全局優化,若為了兼顧全局優化和瞬時優化,勢必會損失一些性能。
4 智能控制策略
智能的基本出發點是模仿人的某些行為或思想,具體表現為記憶、學習、模仿、適應、聯想、語言表達、文字識別、邏輯推理、歸納總結及綜合決策等各種能力[19]。隨著人工智能技術和計算機技術的發展,已經有研究者把自動控制和人工智能以及系統科學中一些有關學科的分支如:系統學和運籌學等結合起來,建立了一種適用于比較復雜系統的控制理論和技術,即智能控制。智能控制技術具有自適應、自學習及自組織等優點,可以解決很多工程上用傳統方法不能解決的問題。為了改善目前現有HEV控制策略存在的缺陷,近年來,研究者提出將智能控制應用于HEV的控制中。
4.1 基于博弈論控制策略
博弈論又被稱作對策論,它是現代數學的一個分支,也是運籌學的一個重要學科。博弈論是指2人在平衡的對局中各自利用對方的策略來變換自己的對抗策略,以達到取勝的目的。博弈論充分考慮游戲中的個體預測行為和實際行為,并研究它們的優化策略,利用這一特點,研究者把發動機和電機看成游戲的參與者,將整車功率控制看成參與者之間的合作博弈行為。
目前,將博弈論應用到PHEV控制策略中的研究較為缺乏,比較有代表性的是文獻[20]的相關研究,把PHEV的各種操作看成是驅動程序和動力總成的一種非合作性博弈,在設計過程中應用了基于規則和基于動態規劃的思想,仿真結果表明,這種方法能夠很好地降低燃油消耗率。國內的一些學者也把博弈論的思想引入PHEV,提出了自己的想法。文獻[21]在建立博弈進化模型的基礎上,提出了基于行為博弈論的博弈進化算法,并針對不同的行駛工況設計了不同的學習模型:模仿學習與信念學習算子。把博弈進化算法應用到HEV控制策略中,通過Visual Studio調用MATLAB及ADVISOR,實現了一款ADVISOR內置的“PARALLEL_defaults_in”車型的控制策略優化。
由以上研究可知,雖然基于博弈論的控制策略能夠減少HEV的燃油消耗,降低污染物的排放,使HEV各項性能指標均有不同程度改善,但是這種算法和思想在計算和處理的過程中比較耗時,在實際應用中,必須要提高思想的并行化,在仿真測試中,能夠測試的問題有限,還需設法測試不同類型的參數來驗證基于博弈論控制策略的性能。
4.2 基于多智能體控制策略
智能體是一種具有智能性和自適應性的實體,這種實體可以是智能軟件、智能設備或智能機器人等。它能代表用戶或其他程序,以主動服務的方式完成一項工作。多智能體系統(MAS)是一個能夠耦合的智能體網絡,這些智能體能夠通過交互、協作等方式對一些問題進行求解。其中每一個智能體既是單獨的又是相互聯系的。智能體系統有著很多的特性,如自主性、交互性、反應性以及互動性等。已經有研究證明了多智能體系統的思想符合HEV控制策略的管理和優化[22]。可以利用智能體系統的這些特性來對HEV進行能量的管理和控制。一般根據爬坡度以及節氣門開度把汽車行駛的路況分為鄉村、城市和高速,工況判別規則,如表1所示,可根據表1來判斷PHEV的行駛路況。

表1 汽車行駛工況判別規則表
文獻[23]以PHEV為研究對象,建立動力總成部件子系統智能體模型,構建了多智能體系統協調控制框架,根據不同工況模式對總成動力進行分配,利用單智能體的智能行為和多智能體的協作能力解決了汽車對復雜路況的自適應問題,具體情況如圖3所示,并在Cruise軟件上對其進行了仿真,結果表明這種策略可以改善整車的燃油經濟性和動力性,但這只是一個初步的總體構想,若要真正應用到HEV中還需要相關技術的進一步支持。
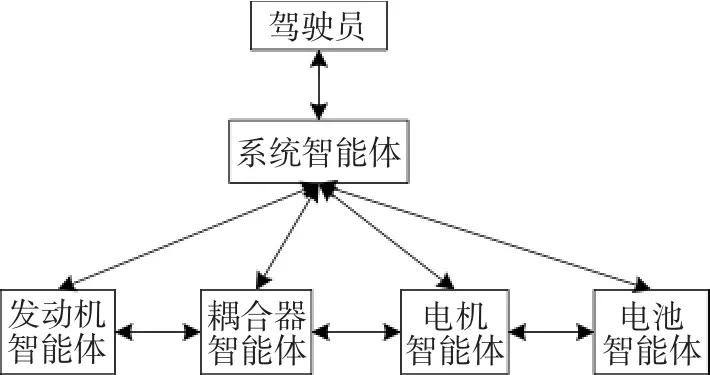
圖3 基于多智能體的控制策略
雖然把智能體系統應用到HEV中能夠有效改善整車燃油經濟性和動力性,對于PHEV的控制有諸多優點,但是目前對多智能體系統的研究還比較少,不夠成熟。
4.3 基于神經網絡控制策略
神經網絡控制指的是把神經網絡技術應用到控制系統中,對難以精確控制的對象進行優化計算或者作為控制器起控制作用或對對象進行故障診斷。神經網絡有很強的魯棒性、自適應性以及容錯能力。
文獻[24]建立了基于Takagi-Sugeno模型的模糊神經網絡,通過對模糊神經網絡進行訓練,生成了駕駛意圖模糊推理規劃。從仿真結果可以得出,得到的模糊推理規則可以很好地識別駕駛意圖,并能進一步提高HEV的燃油經濟性。文獻[25]采用傳統瞬時優化策略基于離線仿真試驗采集數據以訓練小波神經網絡,并用訓練好的小波神經網絡控制器實現該策略,從而提出了一種基于小波神經網絡的PHEV實時控制策略。這種控制策略不僅能夠保證汽車的燃油經濟性,而且克服了瞬時優化策略難以實時控制的缺點,但該控制策略的優化性能不是很強,優化性能還需要進一步改善。
文獻[26]利用神經網絡開發了一種應用于HEV的能源管理系統,并對該管理系統進行了開發和測試,結果表明該系統能夠最大限度地減少汽車的能源需求,并且能與不同的主要動力來源工作。文獻[27]從城市公交車的運行路線固定這一特點出發,引入單參數長度比,設計了一種基于長度比例神經網絡的插電式混合動力城市客車在線控制策略,并進行了仿真,結果表明這種策略可以大大降低總成本和電荷消耗,縮短充電時間。這2類都是利用神經網絡設計了一種新的控制策略,能夠有效提高HEV的能源利用率,若要將該控制思想與方法進行實際應用則還需進行改進與完善。
結合以上研究,基于神經網絡的控制策略能夠彌補傳統優化策略計算復雜和實時性差的缺點,并且能夠識別駕駛員的駕駛意圖,可以有效優化HEV的控制策略,但其優化性能還不是很好,對于HEV在行駛過程中的優化問題還需要進一步的改善。目前所研究的智能控制更多的是基于知識,利用專家的經驗、邏輯推理及學習能力來進行控制,以定性分析為主與定量分析相結合的控制方式。這種控制方式在技術方面還不是很成熟,目前還不能普遍應用于HEV中。
5 結論
整車控制策略的綜合性能和優化能力對于改善HEV性能有著至關重要的作用。目前已經開發的控制策略各具優缺點,互補性很強,但都沒有達到最優。結合國內外對于HEV控制策略的研究分析可知:1)可以利用目前已有的各種控制策略優勢,實現集成控制,讓控制策略能夠最大限度地發揮其優點,提高控制系統的綜合性能。2)為了獲得更好的控制效果,可以開發探索更適用于HEV的智能控制策略。智能控制的關鍵技術是智能化,將優化算法和智能控制相結合是解決控制策略問題的關鍵。
猜你喜歡
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
消費導刊(2018年10期)2018-08-20 02:57:02
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
通信電源技術(2016年1期)2016-04-16 04:57:26