微型電動車無動力中斷換擋控制試驗研究
2017-08-30 01:34:30董鵬吳斌胡政
汽車實用技術 2017年13期
董鵬,吳斌,胡政
(北京工業大學,北京 100124)
微型電動車無動力中斷換擋控制試驗研究
董鵬,吳斌,胡政
(北京工業大學,北京 100124)
針對AMT(機械式自動變速器)存在的換擋動力中斷問題,提出了一種適合微型電動車的雙電機(包括驅動電機和輔助電機)AMT驅動系統,同時搭建了試驗臺架。根據無動力中斷換擋的控制要求,應用Mtalab/Simulink軟件設計了一種基于驅動電機和輔助電機輸出轉矩協同控制的換擋策略,并下載到快速原型控制系統中進行換擋試驗。結果表明,設計的雙電機AMT驅動系統能實現無動力中斷換擋,換擋過程中系統輸出軸的轉速波動較小。
微型電動車;雙電機;無動力中斷換擋;轉矩協同控制
CLC NO.:U463.2 Document Code: A Article ID: 1671-7988 (2017)13-05-04
引言
微型純電動車作為新能源車的一種,其擁有零排放、結構簡單、性價比高等特點,已越來越受到關注。當前微型純電動車主要采用固定速比的電機驅動系統,為了滿足整車的加速和最高車速的設計要求,需要高性能的驅動電機和電池[1]。與固定速比的傳動系統相比,兩擋變速傳動系統一方面可以滿足純電動車對低速爬坡和最高車速的要求;另一方面可以降低對電機和電池的性能要求,提高電機在高效區域的工作范圍,降低電能消耗[2]。但是對于匹配AMT的純電動汽車,在換擋時存在換擋沖擊和動力中斷的問題[3]。E. Galvagno等人在傳統裝備內燃機的車上,用濕式離合器替代AMT五擋同步器的轉矩輔助方法,克服AMT常見的換擋動力中斷問題[4]。對于純電動車,現有文獻中主要是采用行星齒輪、雙電機結構的方法實現無動力中斷換擋,其中大多是關于仿真的研究[1,5-7],但是相關實驗的研究內容較少。為提高微型電動車的動力性、經濟性及平順性,對傳統AMT進行改造,即在AMT的換檔軸上加裝一臺功率相對較小的輔助電機,并開發了雙電機輸出轉矩協同控制的換檔策略,進行換檔臺架試驗,驗證無動力中斷換擋的可行性。
1 雙電機AMT驅動試驗系統組成
1.1 雙電機AMT驅動機構和無動力中斷換擋原理
試驗中雙電機AMT驅動機構如圖1所示,主要包括驅動電機、輔助電機和AMT,其中驅動電機與AMT的輸入軸連接,輔助電機與換擋軸連接。AMT為兩擋變速器,變速比如表1所示。換擋機構與AMT殼體集成,由換擋電機、減速齒輪和換擋執行器組成,換擋執行器的作用是在換擋電機驅動下,實現不同擋位(1擋、空擋和2擋)的切換。
常見的單電機AMT系統,在換擋過程中,由于需要驅動電機降低轉矩進行摘擋及掛擋,從而產生動力中斷的問題,降低了車輛駕駛的平順性。對此設計了雙電機AMT驅動系統機構,即在AMT的換檔軸上加裝一個輔助電機,在換檔時控制驅動電機轉矩下降的同時,增大輔助電機的輸出轉矩;同時在驅動電機轉矩恢復時,降低輔助電機的轉矩輸出,維持換擋時車輛的動力輸出,減小AMT輸出軸轉速的波動。
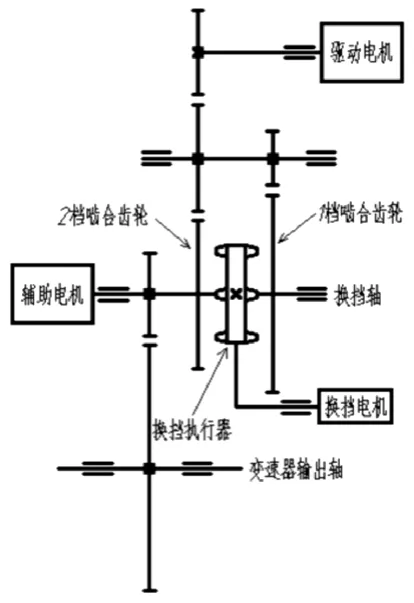
圖1 雙電機AMT驅動機構
1.2 整車、電機參數和換擋規律
雙電機AMT驅動系統所設計的整車參數如表1所示。

表1 整車參數
由表1的整車參數需求確定驅動電機的額定功率為1200W,額定轉速為3000rpm。換擋時車輛的需求轉矩由輔助電機提供,考慮換擋前后整車需求功率和車速不變,因此可以根據換擋時整車的牽引力、車速以及AMT的速比確定輔助電機的參數。最終確定升擋時輔助電機所需功率為266W,轉速為525r/min;降擋時輔助電機所需功率為190W,轉速為386r/min。根據以上要求,驅動電機和輔助電機的詳細參數如表2所示。
根據微型車的特點,采用單參數換擋規律,換擋曲線如圖2所示。即車速大于13.6km/h時,進行升擋;當車速小于10km/h時,進行降擋。
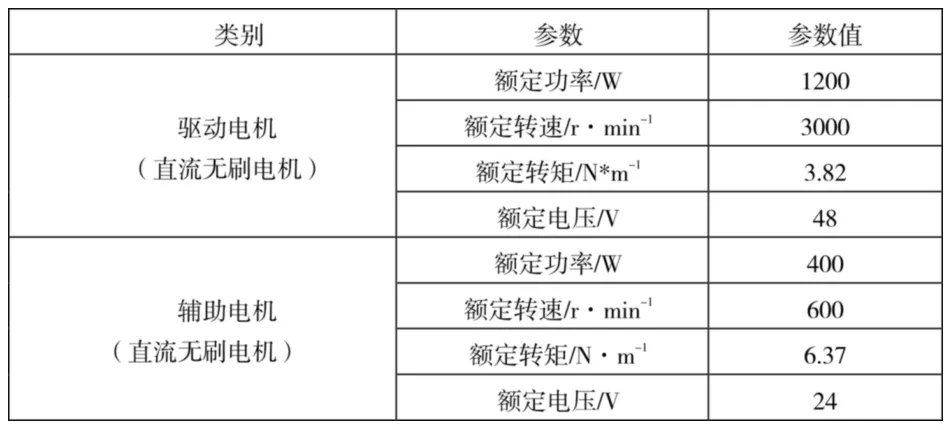
表2 電機參數

圖2 升擋和降擋曲線
1.3 雙電機AMT驅動系統試驗臺架
雙電機AMT驅動系統試驗臺架如圖3所示,主要包括機械傳動部分和控制部分。其中機械傳動部分包括雙電機AMT驅動機構、轉速/轉矩傳感器、制動器和慣性飛輪組。其中驅動電機和輔助電機可以進行轉矩控制;AMT變速器用于降低轉速、增加轉矩;轉速/轉矩傳感器用于實時監測AMT輸出軸的轉速和轉矩;制動器和慣性飛輪組分別用于模擬換檔時整車的負載和慣量。
控制部分包括驅動電機控制器、輔助電機控制器、TCU(AMT控制單元)、PC機。驅動和輔助電機控制器可以控制電機工作在轉矩和轉速模式。TCU采用北京九州華海科技有限公司的快速原型開發平臺,TCU通過硬件的D/A(數字量轉模擬量)管腳,向電機控制器的A/D(模擬量轉數字量)管腳發送踏板模擬量,實現對驅動電機和輔助電機的轉速和轉矩控制;同時TCU基于換擋執行器反饋的位置信號控制換擋電機的摘擋和掛擋操作。PC機與TCU通過CAN(控制器局域網)線實現通訊,完成程序刷寫、控制參數的監測和標定。
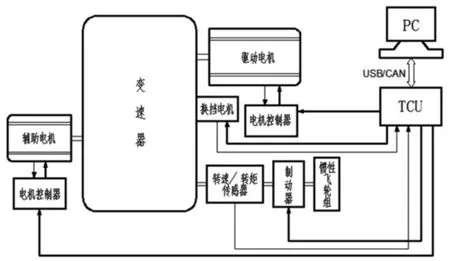
圖3 雙電機AMT驅動系統試驗臺架簡圖
2 控制策略
采用基于模型的方法在Matlab/Simulink軟件上完成換擋控制策略模型的建立,部分模型如圖4所示。

圖4 Simulink中換擋控制的部分模型
雙電機AMT驅動系統的無動力中斷換擋過程包括5個階段:(1)驅動電機轉矩下降、輔助電機轉矩上升;(2)摘擋;(3)驅動電機調速;(4)掛擋;(5)驅動電機轉矩恢復、輔助電機轉矩下降。換擋控制流程如圖5所示,以升擋為例,對過程進行描述。首先,進入第1階段,TCU控制驅動電機輸出轉矩T1,并逐漸下降為0;同時控制輔助電機輸出轉矩T2,上升到目標轉矩T20(注:圖5中的T10和T20分別為驅動電機和輔助電機在不同階段的目標轉矩),以保持AMT輸出軸轉矩基本保持恒定。驅動電機和輔助電機都達到目標值后,進入第2階段,TCU控制換擋電機驅動換擋執行器與1擋擋位齒輪分離,將擋位變為空擋。此時,換擋過程進入第3階段,TCU控制驅動電機進行轉速調節,用以調節2擋擋位齒輪的轉速,使換擋執行器與2擋擋位齒輪的轉速差達到一定范圍內。轉速調節完成后進入第4階段,TCU控制換擋電機將換擋執行器與2擋擋位齒輪結合,完成掛擋。掛擋結束后進入第5階段,TCU控制驅動電機輸出轉矩T1,恢復到2擋擋位對應的目標值T10;同時控制輔助電機輸出轉矩T2并逐漸降為0,以保持AMT輸出軸轉矩基本恒定。當驅動電機和輔助電機都到達目標轉矩時,表明升擋動作完成。降擋過程的控制流程和升擋過程類似。
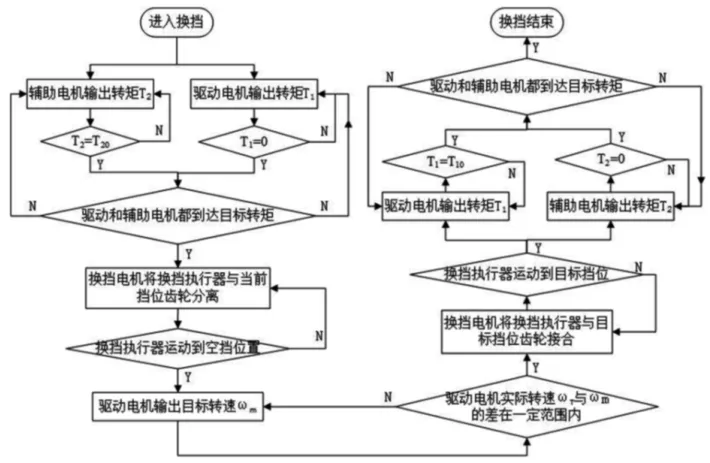
圖5 雙電機AMT換擋控制流程圖
3 試驗驗證與結果分析
對已建立好的控制策略模型完成功能驗證后,將Simulink模型生成C代碼及二進制代碼,通過USB/CAN卡將其刷寫進TCU中,在穩態工況下進行升檔和降檔試驗。試驗中驅動電機和輔助電機的踏板模擬量根據電機轉速和需求轉矩確定,具體數據由試驗臺架測得,如圖6、圖7所示。
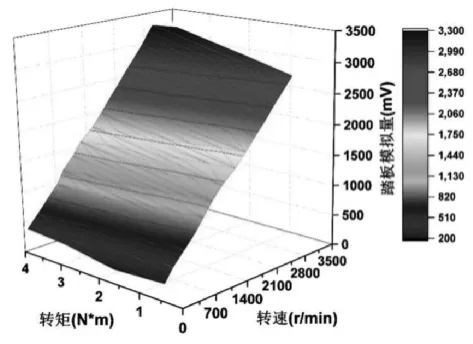
圖6 驅動電機的踏板模擬量map圖

圖7 輔助電機的踏板模擬量map圖
在升擋過程中,驅動電機和輔助電機的目標轉矩變化如圖8所示。由于摘擋前和掛擋后電機轉矩變化范圍不同,造成第1階段的時間小于第5階段的時間,即t1小于t2。變速器輸出軸轉速、換擋執行器目標和實際位置的變化如圖7所示。由于驅動電機和輔助電機的轉矩協同控制,使得變速器輸出軸轉速在升擋過程中變化不大,波動范圍在10r/min左右,驅動電機調速階段轉速略有上升。同時由于電機響應的問題,實際過程中轉矩上升的速度要比下降的速度慢,造成換擋過程中輸出軸轉速有兩次轉速先下降又上升的現象。

圖8 升擋過程驅動電機和輔助電機目標轉矩變化

圖9 升擋過程輸出軸的轉速和換擋執行器位置變化
同樣,降檔過程中驅動電機和輔助電機的目標轉矩變化如圖10所示。降檔過程的第1階段時間t3比升擋對應的時間t1長,是因為升擋過程中,該階段驅動電機輸出轉矩變化范圍較小,所需時間較短;第5階段對應的時間t2大于t4,主要是由于升擋時該階段驅動電機輸出轉矩變化范圍大,造成所需時間變長。降檔過程中變速器輸出軸轉速、換擋執行器目標和實際位置的變化如圖11所示。整個降檔過程中變速器輸出軸轉速的波動范圍在8r/min左右,且與升擋過程相比,驅動電機進行轉速調節時,沒有產生較大的轉速過沖現象,但是驅動電機調速時間相對變長。與升擋相似,降檔時也產生輸出軸轉速先下降后上升的現象。
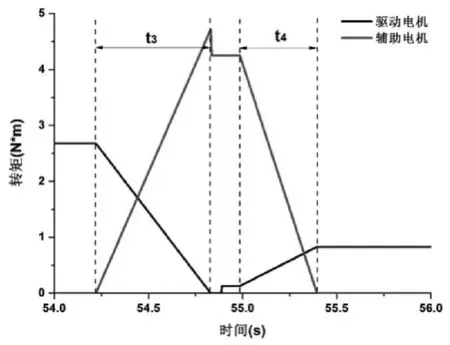
圖10 降擋過程驅動電機和輔助電機目標轉矩變化

圖11 降擋過程輸出軸的轉速和換擋執行器位置變化
4 結論
針對雙電機AMT驅動系統的微型電動車,根據無動力中斷換擋控制要求,制定了換檔工況下驅動電機、輔助電機輸出轉矩協同控制策略。試驗結果表明在雙電機輸出轉矩的協同控制策略作用下,試驗臺架中AMT輸出軸能持續輸出動力,升擋和降擋過程中變速器輸出軸轉速波動較小,波動范圍都在10r/min以內,可以滿足無動力中斷的換擋控制要求。
[1] Bingzhao Gao, Qiong Liang, Yu Xiang etc. Gear ratio optimization and shift control of 2-speed I-AMT in electric vehicle [J]. Mechanical Systems and Signal Processing, 2015, 50-51:615-631.
[2] Q. Ren, D. A. Crolla, A. Morris. Effect of transmission design on electric vehicle (EV) performance [C]. Vehicle Power and Propulsion Conference, 2009:1260-1265.
[3] 李川. 雙電機混合動力客車換擋無動力中斷研究[D]. 長春:吉林大學, 2007.
[4] E. Galvagno, M. Velardocchia, A. Vigliani. Analysis and simulation of torque assist automated manual transmission [J]. Mechanical Systems and Signal Processing, 2011, 25:1877-1886.
[5] 王軍年,劉德春,張運昌等. 新型雙電機構型純電動汽車節能潛力分析 [J]. 吉林大學學報(工學版), 2016, 46 (1) :28-34.
[6] 劉德春. 雙電機構型純電動轎車動力系統匹配與控制策略研究[D]. 長春:吉林大學,2014.
[7] 楊勝兵,宋鵬飛,毛沖沖. 新型雙電機分時獨立驅動的純電動汽車仿真分析 [J]. 武漢理工大學學報(交通科學與工程版), 2016, 40 (4):651-656.
Experiment study on uninterrupted gear shift control in micro electric vehicle
Dong Peng, Wu Bin, Hu Zheng
( Beijing University of Technology, Beijing 100124 )
For problem of gear shift power interrupted in AMT (Automated Mechanical Transmission) present, a dual-motor (included drive motor and auxiliary motor) AMT propulsion structure to micro electric vehicle is put forward, moreover the test bench is constructed. According to control demand of uninterrupted gear shift, a strategy which coordinate control output torque on dual motor is designed by Matlab/Simulink software, and made gear shift experiments by download control program in rapid prototyping system. The results of test indicated that, the uninterrupted gear shift of dual-motor AMT system is achieved, and the system output shaft speed fluctuation are smaller during gear shift.
micro electric vehicle; dual-motor; uninterrupted gear shift; torque coordinated control
U463.2
A
1671-7988 (2017)13-05-04
10.16638/j.cnki.1671-7988.2017.13.002
董鵬,男,碩士研究生,主要研究方向為汽車電子控制技術。< class="emphasis_bold">通訊作者:吳斌,
吳斌,男,副教授,碩士研究生導師,就職于北京工業大學環境與能源工程學院汽車系。主要研究方向為汽車電子控制技術。