淺析汽車牽引力控制系統設計與仿真
2017-08-30 01:34:30嚴彥
汽車實用技術 2017年13期
關鍵詞:汽車
嚴 彥
(武漢理工大學,湖北 武漢 430070)
淺析汽車牽引力控制系統設計與仿真
嚴 彥
(武漢理工大學,湖北 武漢 430070)
牽引力控制系統通過控制車輪的滑轉狀態,合理的分配驅動輪力矩,提高了車輪對路面附著的利用程度,有效提高了車輛的動力性,改善了操縱穩定性。首先基于PID算法分別設計了汽車牽引力驅動控制器和制動控制器,并采用Matlab/simulink軟件完成算法的模塊搭建。然后在Carsim軟件中建立了汽車仿真模型,將simulink軟件中的驅動控制器和制動控制器分別與汽車模型進行聯調。最后對汽車仿真模型在均一低附著路面和分離路面進行仿真模擬,分析了驅動輪滑轉率。結果表明,采用汽車牽引力控制系統能夠使驅動輪的滑轉率控制在目標范圍內,能夠抑制驅動輪的過度滑轉,充分利用地面的附著條件,提高了汽車的動力性和操縱穩定性。
牽引力控制系統;滑移率;PID控制;仿真
CLC NO.:U462.1 Document Code: A Article ID: 1671-7988 (2017)13-60-05
引言
汽車牽引力控制系統(TCS)是車輛在起步、加速、爬坡時防止驅動輪發生過度滑轉,以獲得最大牽引力和最佳操縱穩定性的一種主動控制系統,是繼制動防抱死控制系統(ABS)之后又一新發展,對于改善車輛的牽引性、操縱性、穩定性、安全性和舒適性等具有重要的意義。
本文在Matlab/simulink環境下,對驅動控制的總體模型進行仿真,選取驅動輪的滑轉率、驅動輪速、汽車的車身速度、制動輪缸的壓力以及節氣門的開度作為評價參數,對牽引力控制系統的性能進行評價,分析仿真結果。
1 汽車牽引力控制策略及其算法模塊搭建
1.1 汽車牽引力控制策略研究
TCS性能控制工況控制目標涉及汽車的牽引性和操縱穩定性,汽車在不同工況下,對不同性能之間的側重有所不同。本文主要研究在低附著均一路面和分離路面直線加速行駛的工況下的牽引力控制性能。
(1)低附著均一路面直線行駛
汽車在低附著均一路面上直線行駛時,驅動輪出現過度滑轉,此時,應采用發動機節氣門開度控制,通過控制節氣門的開度調節驅動力的驅動力矩來控制驅動輪的滑轉率,使汽車具有良好的牽引性能。
(2)分離路面直線行駛
汽車在附著分離路面上直線行駛時,處于低附著路面的車輪打滑,高附著路面的車輪附著力未得到充分利用,必須快速對驅動輪打滑做出反應。在低速加速情況下(V<30km/h)采用驅動輪制動控制的方法進行控制,驅動輪制動力控制以低附著一側驅動輪的滑轉率為控制目標對兩側驅動車輪的制動壓力進行調節,使兩側驅動車輪的滑轉率都處于峰值附著系數的附近范圍之內。
汽車各行駛工況下的牽引力控制策略如表 1:

表1 汽車行駛工況下的牽引力控制策略
1.2 PID控制算法
汽車牽引力控制算法是牽引力控制系統的“靈魂”,也是牽引力控制系統控制軟件的基礎,本文采用傳統的數字PID控制算法。
1.2.1 節氣門PI控制器模塊
發動機節氣門控制的目標是實現最優的驅動轉矩輸出,使得驅動輪工作在路面附著力上限區域附近,且無過度驅動引起輪胎滑轉發生。由于實車控制中輪速信號等包含較多的噪聲,微分環節容易造成控制量的反復波動,不利于節氣門調節的穩定性,因而采用節氣門的增量式PI控制方式(即將式(1.1)中kd設為0)。該控制器在simulink環境下搭建的PI算法模塊如圖 1所示。


圖1 PI算法模塊
設最優目標滑轉率為s0,通常認為驅動輪目標滑轉率s0處于0.1--0.25范圍內時車輛可同時獲得較大的縱向和側向附著系數,這里取s0=0.18。
兩驅動輪的滑轉率平均值為:

圖 1 PI模塊的輸出是實現目標滑轉率的節氣門開度,PI模塊的輸入則選用最優目標滑轉率和兩驅動輪滑轉率均值的偏差:

1.2.2 主動制動壓力控制器模塊
TCS主動制動增壓速率很高并且滯后時間短,車輪對壓力干涉的響應速度快,壓力干涉容易造成輪速較大的波動,因而必須迅速將輪速變化趨勢反饋回控制系統。引入微分環節及時地識別驅動輪的抱死趨勢或滑轉趨勢,在壓力控制中實現壓力迅速調整,抑制輪速的較大波動。因此主動制動采用增量式PID控制算法。該控制器在simulink環境中的PID算法模塊如圖 2所示。
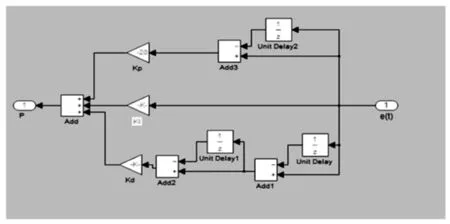
圖2 PID算法模塊
該模塊的輸出量是實現目標滑轉率的驅動輪輪缸壓力。由于主動制動控制是在分離路面工況下啟動的,因此左右兩側車輪的滑轉率不一樣,低附著一側的車輪滑轉率會很大,為了使兩側車輪的滑轉率都不超過最優滑轉率,因此圖 2中的PID模塊的輸入變量是最優滑轉率和低附著一側滑轉率的偏差:

控制策略和控制算法是牽引力控制系統的核心,控制策略與控制算法的好壞將直接影響控制效果的優劣。本章確定了牽引力控制策略:在均一低附著路面直線加速時采用發動機節氣門控制,在分離路面直線行駛時采用主動制動控制。在simulink環境下應用PI控制算法搭建節氣門控制模塊,應用PID算法搭建主動制動控制模塊。
2 汽車仿真總體模型搭建
2.1 建立汽車仿真模型
2.1.1 車輛參數設置
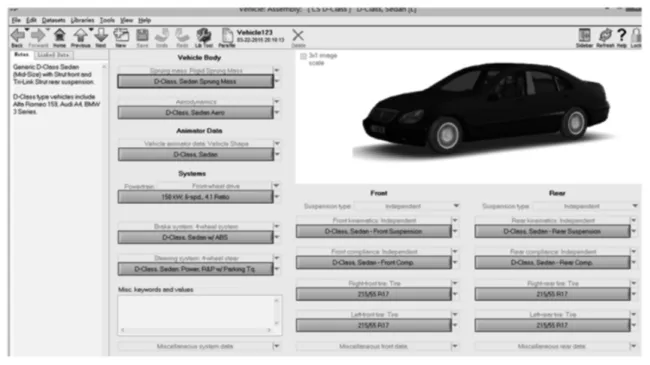
圖3 參數設置界面
CarSim是專門針對車輛動力學的仿真軟件,本文的汽車仿真模型的參數是參考CarSim中D級轎車(D-Class,Sedan)的默認參數,即整備質量為1.37噸,長/寬/高分別為3850/1795/1471mm,軸距2776mm,發動機額定功率是150kw,六速自動變速箱,帶有ABS液壓制動,車輪型號為215/55 R17。
在Carsim軟件中設置好參數之后的界面如圖3所示。
2.1.2 仿真工況的設置
本文設計的牽引力控制系統仿真工況是分別在低附著均一路面和分離路面上直線加速,這兩種工況的參數如表2 所示。
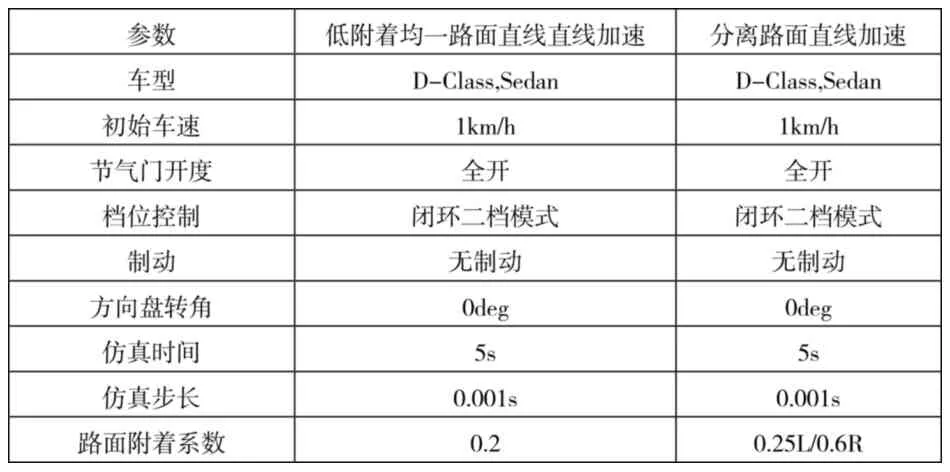
表2 仿真工況參數
在Carsim軟件中設置好工況的參數界面如圖4及圖5。

圖4 低附著均一路面

圖5 分離路面
2.2 聯合仿真總體模型搭建
2.2.1 設置simulink接口
當simulink和Carsim聯合仿真時,要先在carsim中設置好導入變量和導出變量。
1)導入變量
在節氣門開度控制器中控制滑轉率是通過調節節氣門的開度來實現的,而在主動制動控制器中控制滑轉率是通過調節驅動輪的制動壓力來實現的。所以前者導入變量為節氣門開度,后者導入變量為左右驅動輪制動輪缸壓力。
2)導出變量
根據在simulink環境中的建模需要,節氣門開度控制器和主動制動控制器的導出變量都是是左右驅動輪的輪速以及車速。
2.2.2 搭建仿真總體模型以及調整控制算法參數
在設置好simulink接口之后,點擊carsim軟件的send to simulink 按鈕就能在simulink模型界面搭建由汽車模型和控制器模型連接的閉環模型框圖,如圖6和7所示。
搭建好總體模型之后就可以聯合調試確定兩模型的參數值,具體值見表3。
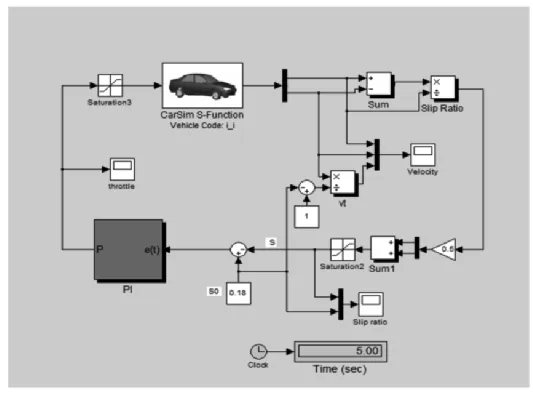
圖6 節氣門開度控制器仿真總體模型
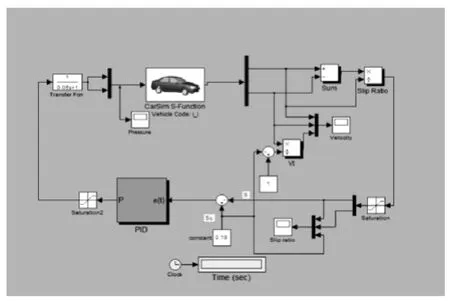
圖7 主動制動控制器仿真總體模型
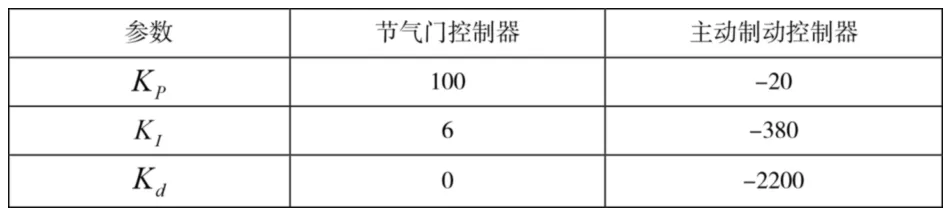
表3 控制器參數值
3 D級轎車牽引力控制系統仿真分析
針對TCS系統所設計的控制算法進行驗證和比較,集中進行了仿真及試驗分析。研究了PID算法在不同路況下的仿真情況,給出了仿真結果,并進行了詳細的算法分析與比較。
3.1 低附著均一路面直線驅動仿真分析
3.1.1 無TCS低附著均一路面直線驅動仿真分析
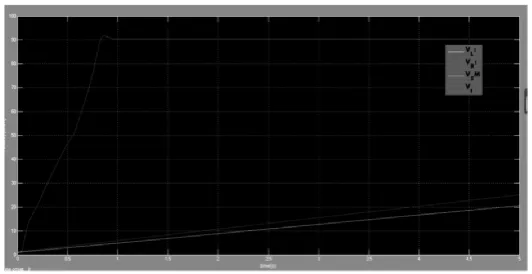
圖8 無TCS控制低附著路面速度曲線

圖9 無TCS控制低附著路面滑轉率曲線
圖8和9所示為汽車在低附著路面直線加速時無牽引力控制的仿真結果。仿真條件:汽車以初始速度1km/h并且保持二檔、節氣門全開在附著系數為0.2的均一路面上直線加速行駛5s。圖8中的 VL1、VR1、VSM、Vt分別表示是左右驅動輪輪速、車速、目標車速的曲線,圖9中的S、So分別表示左右驅動輪平均滑轉率、目標滑轉率。由圖可知,因為節氣門全開,因此在沒有牽引力控制控制情況下,驅動力矩會在短時間內快速增大,左右驅動輪的平均滑轉率迅速升高(在0.1s時就達到了0.9),從而地面附著系數降低,車輪驅動力下降,導致地面附著力不能得到充分利用,同時發動機轉速上升,輸出轉矩下降。由于驅動力矩大于地面附著力,所以車輪滑轉率迅速升高,驅動輪輪速在短時間內增大,遠大于目標輪速,由圖可知,在0.8s時滑轉率就達到0.9,此時驅動輪輪速增大到92km/h。
3.1.2 有TCS低附著均一路面直線驅動仿真分析
圖10、11、12所示為汽車在低附著路面直線加速時有牽引力控制的仿真結果。仿真條件和無TCS時一樣。
根據所制定的牽引力控制策略,通過控制發動機輸出轉矩即控制節氣門開度使前驅動輪保持在最佳滑轉范圍內。由圖12可知,在牽引力控制作用下,發動機的節氣門開度在經過0.7s的適應階段之后保持穩定的趨勢。由于控制了發動機的輸出轉矩,傳到驅動輪的驅動力矩就降低了,所以降低了兩前驅動輪的滑轉率,在經過0.7s的適應階段之后穩定在0.16左右,在期望的滑轉率附近(20%),因而有較大的側向附著力,保證了汽車的轉向能力。同時驅動輪的地面附著力得到了充分利用,整車動力性有一定的提高。
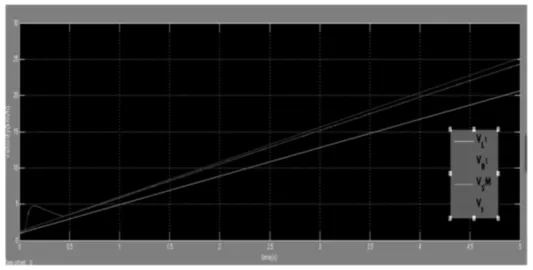
圖10 TCS控制的低附著均一路面速度曲線圖
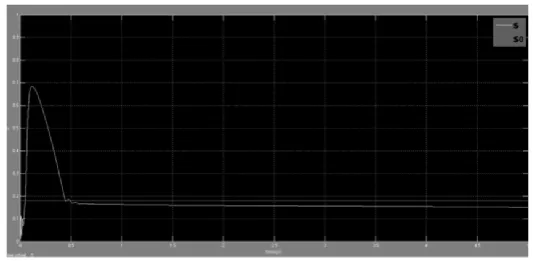
圖11 TCS控制的低附著均一路面滑轉率曲線圖
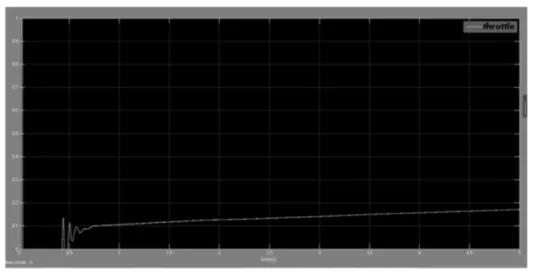
圖12 TCS控制的低附著均一路面節氣門開度曲線圖
3.2 對開路面直線驅動仿真分析
3.2.1 無TCS對開路面直線驅動仿真分析
圖13和14所示為汽車在對開路面直線加速時無牽引力控制的仿真結果。仿真條件:汽車以初始速度1km/h并且保持二檔、節氣門全開在對開路面上直線加速行駛5s,路面中心左側附著系數為0.25,右側附著系數為0.6。
由圖可知,因為節氣門全開,因此在沒有牽引力控制控制情況下,左側驅動力矩會在短時間內快速增大,左驅動輪的滑轉率迅速升高(在0.1s時就達到了0.94),左驅動輪的輪速0.9s時達到了177km/h,遠大于右側驅動輪輪速,極大的降低了汽車的穩定性。左側驅動輪的滑轉率升高導致地面附著系數降低,車輪驅動力下降,所以地面附著力不能得到充分利用。
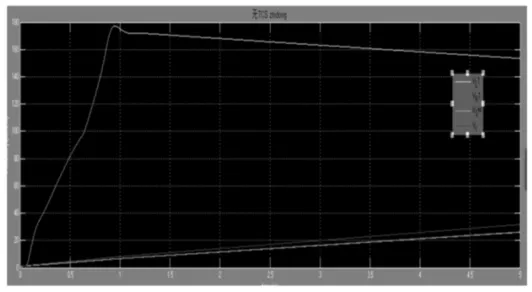
圖13 無TCS對開路面直線加速速度曲線圖
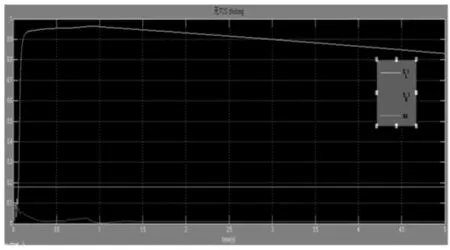
圖14 無TCS對開路面直線加速滑轉率曲線圖
3.2.2 有TCS對開路面直線驅動仿真分析
圖15、16、17所示為汽車在對開路面直線加速時有牽引力控制的仿真結果。仿真條件和3.2.1節中無TCS時一樣。
根據所制定的牽引力控制策略,通過控制制動系統的制動力即左右驅動輪的制動輪缸壓力來使低附著系數一側的驅動輪滑轉率保持在最佳滑轉范圍內。由圖3.10可知,牽引力控制作用下,在0—0.5s這段時間內驅動輪的制動輪缸壓力從0迅速增大到6MPa,仿真結束時為3MPa。由于對驅動輪施加了適當的制動輪缸壓力,因而驅動輪的驅動力矩減少,導致降低了左前驅動輪的滑轉率,在經過0.8s的適應階段之后已經在期望的滑轉率附近(20%),此時左右驅動輪輪速都在目標輪速附近(20%),所以有較大的側向附著力,保證了汽車的轉向能力。同時驅動輪的地面附著力得到了充分利用,整車動力性有一定的提高。
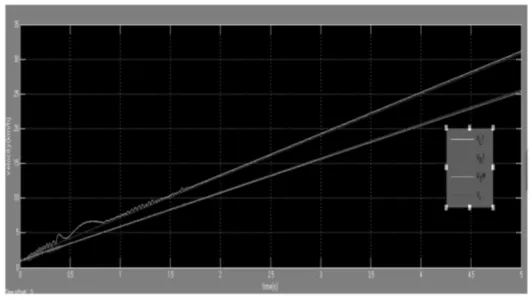
圖15 有TCS對開路面直線加速速度曲線圖
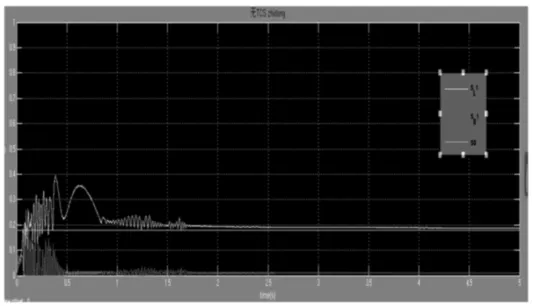
圖16 有TCS對開路面直線加速滑轉率曲線圖
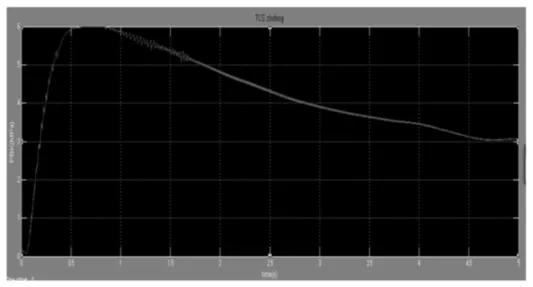
圖17 有TCS對開路面直線加速制動輪缸壓力曲線圖
4 總結
本文在carsim軟件環境中建立了汽車動力學模型。選取了PID控制算法,以驅動輪滑轉率為控制變量,在Maflab/ Simulink環境下進行了建模與仿真的研究。總結全文,得到如下結論:
(1)車輛系統動力學仿真模型是汽車牽引力控制的仿真分析基礎。以carsim為平臺,根據所給的轎車各參數在carsim參數設置界面進行設置,得到的汽車動力學模型為牽引力控制系統仿真提供了基礎。
(2)控制策略和控制算法是牽引力控制系統的核心。通過對各種仿真工況下的控制目標進行分析,確定了牽引力控制策略:在均一低附著路面直線加速時采用發動機節氣門控制,在分離路面直線行駛時采用主動制動控制。在simulink環境下搭建的PI控制算法模塊和PID算法搭模塊是牽引力控制系統的核心。
(3)通過對有無基于PID控制理論的汽車牽引力控制的汽車仿真總體模型的仿真分析,可以看出:采用汽車牽引力控制系統能夠使驅動輪的滑轉率控制在期望的目標滑轉率(20%)附近,能夠抑制驅動輪的過度滑轉,充分利用地面的附著條件,提高了汽車的動力性和操縱穩定性,增強了汽車的主動安全,驗證了所建模型及使用的控制方法的正確性與合理性。
[1] 羅俊奇.汽車驅動防滑控制系統的研究[D].廣東工業大學,2008. 05.
[2] 熊小根.汽車驅動防滑控制系統的控制規律研究[D].合肥工業大學,2010.04.
[3] 王良良.四輪驅動汽車驅動防滑控制系統的設計[D].哈爾濱工業大學,2009.06.
[4] 鄒海斌.汽車驅動防滑控制系統的仿真研究[D].合肥工業大學,2005.03.
[5] 劉洋.電動汽車驅動防滑控制系統的研究[D].遼寧工業大學.2014.05.
[6] 嚴國慶.汽車防滑控制液壓制動系統分析與應用[J],重慶交通大學,2009.04.
[7] 丁華.后輪驅動汽車驅動防滑控制系統建模與控制研究[D].重慶大學.2009.05.
[8] 任少卿,陳慧巖,黃江波,宋士偉.汽車防滑控制系統ABS/ASR基本原理及發展趨勢[J].汽車電器.2006.03.
[9] 李剛.汽車防滑控制制動系統分析與應用[D].吉林大學.2013.06.
[10] 王偉達,丁能根,鄒紅明,余貴珍,徐向陽.汽車ASR系統控制算法及其硬件在環仿真研究[J].汽車工程. 2009(11).
[11] 楊宇,楊毅,余達太,林琳. 汽車驅動防滑控制系統(ASR)的研究[J].自動化技術與應用.2004.02.
Design and simulation of automotive traction control system
Yan Yan
( Wuhan university of technology, Hubei Wuhan 430070 )
∶In this paper, the lightweight design of the steel plate spring of a light truck suspension system is designed as the carrier, and the optimal design of the thin plate spring is optimized by GUI program. By establishing the finite element of the leaf spring and the connecting piece The CAE model is analyzed and calculated. After the physical products are tested and verified by the physical products under the bench test conditions, the correction results of the GUI and CAE are proposed to ensure the practicality of the design.
small piece steel leaf spring lightweight optimization design method
U462.1
A
1671-7988 (2017)13-60-05
10.16638/j.cnki.1671-7988.2017.13.019
嚴彥,就讀于武漢理工大學。
猜你喜歡
人民交通(2020年22期)2020-11-26 07:36:44
小學生優秀作文(低年級)(2020年4期)2020-07-24 08:31:08
汽車與安全(2019年9期)2019-11-22 09:48:03
汽車與安全(2019年8期)2019-09-26 04:49:10
汽車與安全(2019年5期)2019-07-30 02:49:51
汽車觀察(2019年2期)2019-03-15 06:00:06
汽車與新動力(2018年2期)2018-05-09 00:31:56
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50