多功能蜓爪式仿生末端執行器設計與試驗
2017-08-31 15:28:49權龍哲李星輝張傳彬王建森
農業機械學報 2017年8期
關鍵詞:設計
權龍哲 趙 琳 李星輝 張傳彬 王建森 程 攻
(1.東北農業大學工程學院, 哈爾濱 150030; 2.浙江大學生物系統工程與食品科學學院, 杭州 310058)
多功能蜓爪式仿生末端執行器設計與試驗
權龍哲1趙 琳2李星輝1張傳彬1王建森1程 攻1
(1.東北農業大學工程學院, 哈爾濱 150030; 2.浙江大學生物系統工程與食品科學學院, 杭州 310058)
為實現利用同一機械手柔順抓取各種形狀果蔬,并且在保證抓取效率的前提下,有效避免末端執行器對果蔬的損害,設計了一種基于仿生原理的多功能蜓爪式末端執行器。首先通過體式顯微鏡將蜻蜓各爪指的相關物理信息轉換為具有指導意義的數據和量化模型,并采用理論分析與數學建模的方法,確定了機械手前后爪腿節、脛節與跗節的長度分別為36、48、31 mm,機械手中爪腿節、脛節與跗節的長度分別為48、48、36 mm;在此基礎上,采用D-H法建立了該欠驅動末端執行器的運動模型,繪制了機械手的包絡空間區域,進而得到機械手能夠完全包絡各種形態果蔬的主要抓取部位;最后,應用并聯機構平臺和串聯機構平臺開展靜態抓取破壞試驗,測定了損傷力極限值,并進行了果蔬抓取試驗。試驗結果表明,仿生機械手對番茄、蘋果、柿子椒和茄子的平均抓取成功率分別為90.7%、88.6%、87.9%和87.2%,損傷率分別為4.3%、0.7%、3.6%和2.1%;可見該仿生末端執行器能夠較好地實現對各種形態果蔬柔順、穩定的無損抓取。
蜻蜓; 仿生; 末端執行器; 欠驅動; D-H法; 抓取試驗
引言
利用農業智能裝備摘取和分選果蔬的過程中,末端執行器作為機器人接觸果實的重要工作部件被安裝于機械手臂前端,其工作對象的外表較為脆弱,形狀及生長狀況也十分復雜。因此,末端執行器的設計通常被認為是農業機器人的核心技術之一[1-3]。
20世紀90年代,KONDO等[4]設計了一種采用吸盤和兩指夾持器結合并帶有軟襯墊的末端執行器;劉繼展等[5-6]設計了一種番茄采摘末端執行器,并進行了試驗;HAYASHI等[7]為了推廣草莓自動化收獲,設計了一種草莓末端執行器;傅隆生等[8]設計了獼猴桃采摘機器人末端執行器;中國農業大學劉長林等[9]設計了一種采摘茄子的末端執行器。由此可見,國內外在針對單品種果蔬末端執行器的研究中取得了較大進展,但國內外果蔬采摘機器人的末端執行器基本上都是專用的[10-17],只對一種形狀果蔬進行收獲是影響采摘機器人工作效率的主要因素,更是制約采摘機器人未來發展與應用推廣的瓶頸[18]。此外,姬偉等[19]研究了果蔬采摘機器人末端執行器的柔順力控制;金波等[20]設計了欠驅動機械手,并進行了力的控制。在保證抓取效率的前提下,如何有效避免末端執行器對果蔬的損害,實現柔順抓取,也是末端執行器的研究重點[21]。
本文采用仿生學原理,通過研究蜻蜓爪指的結構、形態和功能機理,改進傳統抓取果蔬的末端執行器,設計一種具有仿生結構特征的多功能蜓爪式仿生末端執行器,適用于抓取各種形態果蔬且抓取柔順穩定。
1 仿生材料與方法
1.1 仿生學原理
自然界中的昆蟲有穩定、柔順抓取各種形狀物體的能力,為仿生提供了效仿對象。蜻蜓廣泛分布于湖蕩岸邊、莊稼田地和樹叢中,其棲息環境和棲息習慣決定了蜻蜓具有適應復雜環境的顯著特點。對蜻蜓爪指生物特征的研究可為設計適用于抓取各種果蔬且抓取柔順穩定的末端執行器提供理論依據[22]。
蜻蜓能夠棲息在球類、尖狀類以及平面類等形態各異的物體上并能保持身體的穩定性,在捕食過程中能夠有效抓取包絡各種物體。蜻蜓抓取時的運動形式和它獨特的六指機構為末端執行器的設計提供了效仿對象。
本文仿效蜻蜓單個爪指結構及功能,通過體式顯微鏡進行大量觀察測量,進而得到相應物理信息。但完全的結構圖形仿生目前不易實現,為此本文從關鍵參數入手,提高抓取性能。
如圖1所示,可觀察到蜻蜓爪指的微小細節以及爪指的微觀結構,并且通過軟件計量工具測量出各爪節長度,得到相應各腿節比例。由圖1可知,蜻蜓爪指表面存在大量剛毛,剛毛的摩擦性能提高抓取物體時的附著性,末端執行器設計時,機械爪指表面也增加了摩擦材料,以提高抓取可靠性;但實現穩定抓取的決定性因素中,摩擦性因素不占主導地位,故本文著重分析蜻蜓爪指特有的六指結構,以及各腿節比例等相關物理信息,以達到更理想的仿生效果。

圖1 體式顯微鏡下蜻蜓腿部靜態圖像Fig.1 Static images of dragonfly legs under stereomicroscope
1.2 試驗樣品
試驗所用的黃蜻(Pantalaflavescensfabrici)樣本屬節肢動物門(Athropoda)、昆蟲綱(Hexapoda)、蜻蜓目(Odonata)、蜻科(Libellulidae)、黃蜻屬(Pantala),分布較廣,見于吉林省、遼寧省、黑龍江省等全國大部分地區;試驗所用黃蜻數量為30只。
1.3 蜻蜓爪指的標記測量試驗
蜻蜓爪指的形狀及各腿節比例為本文研究重點。圖2為黃蜻爪指的舒展姿態,這種姿態下爪指呈現對稱分布,而黃蜻身體結構也具有對稱性,因此為了便于研究,認為黃蜻運動時質心位置相對固定,本文僅研究單側爪指的長度、形狀及其比值。
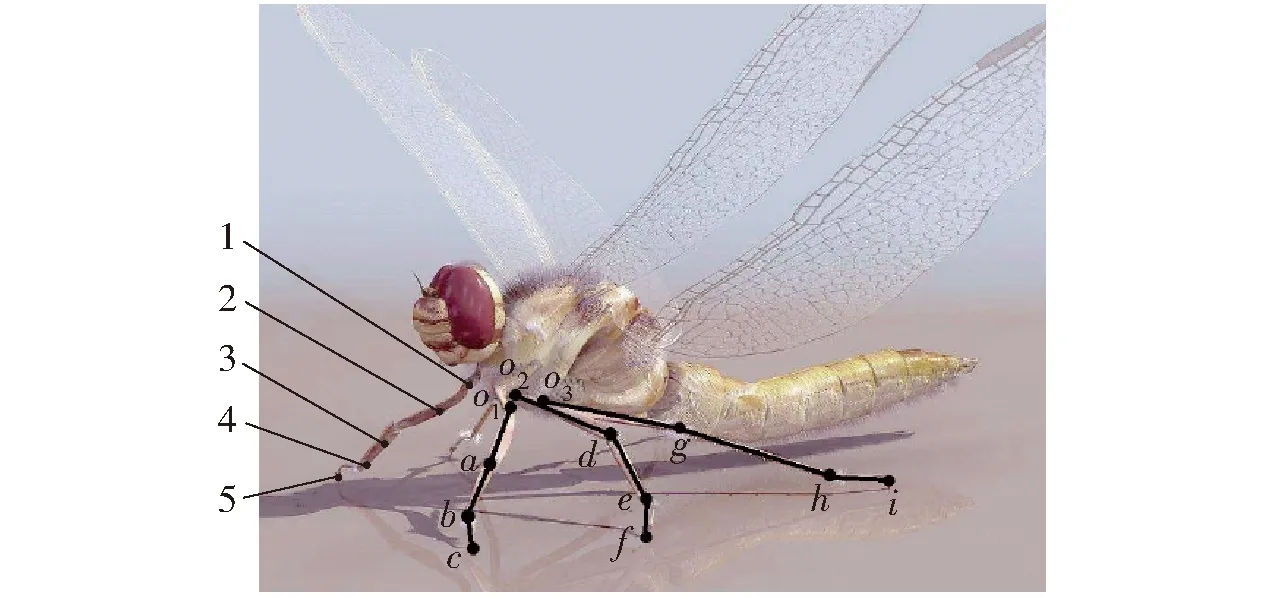
圖2 黃蜻俯視構造圖Fig.2 Bionic view of dragonfly1.基節 2.腿節 3.脛節 4.跗節 5.倒鉤
通過體式顯微鏡獲取靜態數字圖像,使用圖像處理軟件的標尺工具分別測量線段lo1a、lab、lbc、lo2d、lde、lef、lo3g、lgh和lhi的長度,并分別計算每個爪指各指節比值,取10只黃蜻作為樣本,統計結果如表1所示。
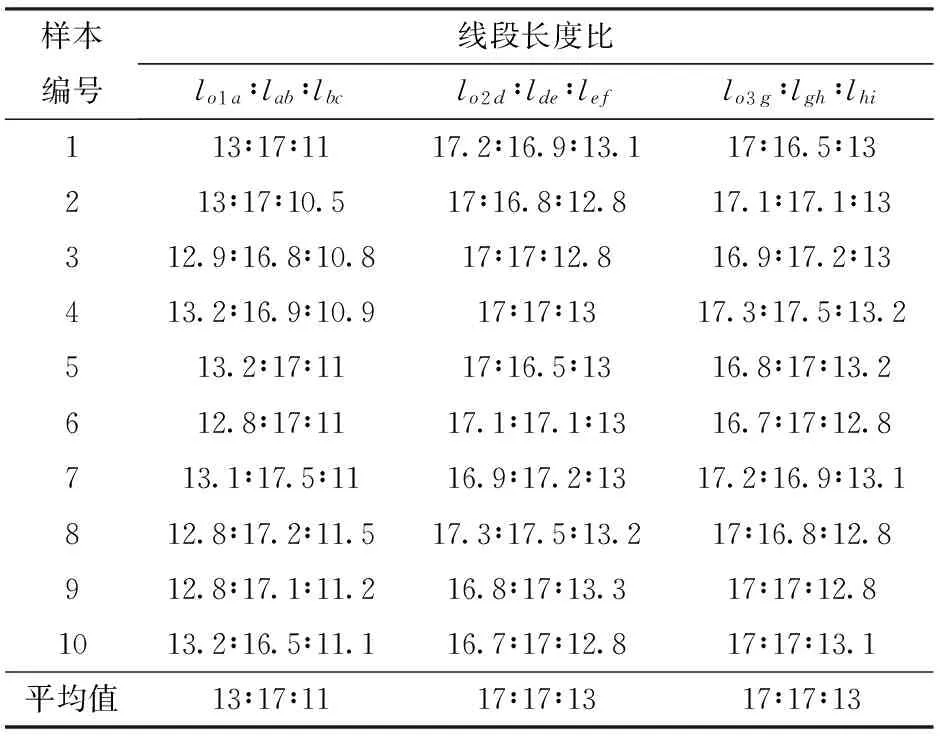
表1 黃蜻爪指長度比例統計結果Tab.1 Statistical results of claw refers to length ratio of dragonfly
由表1可知,黃蜻前爪腿節、前爪脛節與前爪跗節的長度比平均值為13∶17∶11,黃蜻中爪腿節、中爪脛節與中爪跗節的長度比平均值為17∶17∶13,黃蜻后爪腿節、后爪脛節與后爪跗節的長度比平均值為17∶17∶13。
2 蜓爪式仿生末端執行器的材料和結構設計
2.1 材料選擇
本文所述蜓爪式仿生末端執行器的爪指制作采用3D打印技術,材料選用工程塑料中的ABS材料,ABS材料是快速成型工藝常用的熱塑性工程塑料,具有強度高、韌性好、耐沖擊等優點,經校核,強度和剛度均滿足抓取需要[23]。
2.2 結構設計
該末端執行器由框架式機械平臺、智能控制系統、反饋系統、傳動系統、電力輔助系統等組成,如圖3所示。其中,末端執行器的驅動源由伺服電機提供;導向機構由凸輪機構、球鉸及滑塊機構組成,并傳遞縱向力、側向力及力矩;而帶動爪指運動的柔性鐵絲在爪指內部,作為繩索傳動,如圖4所示。
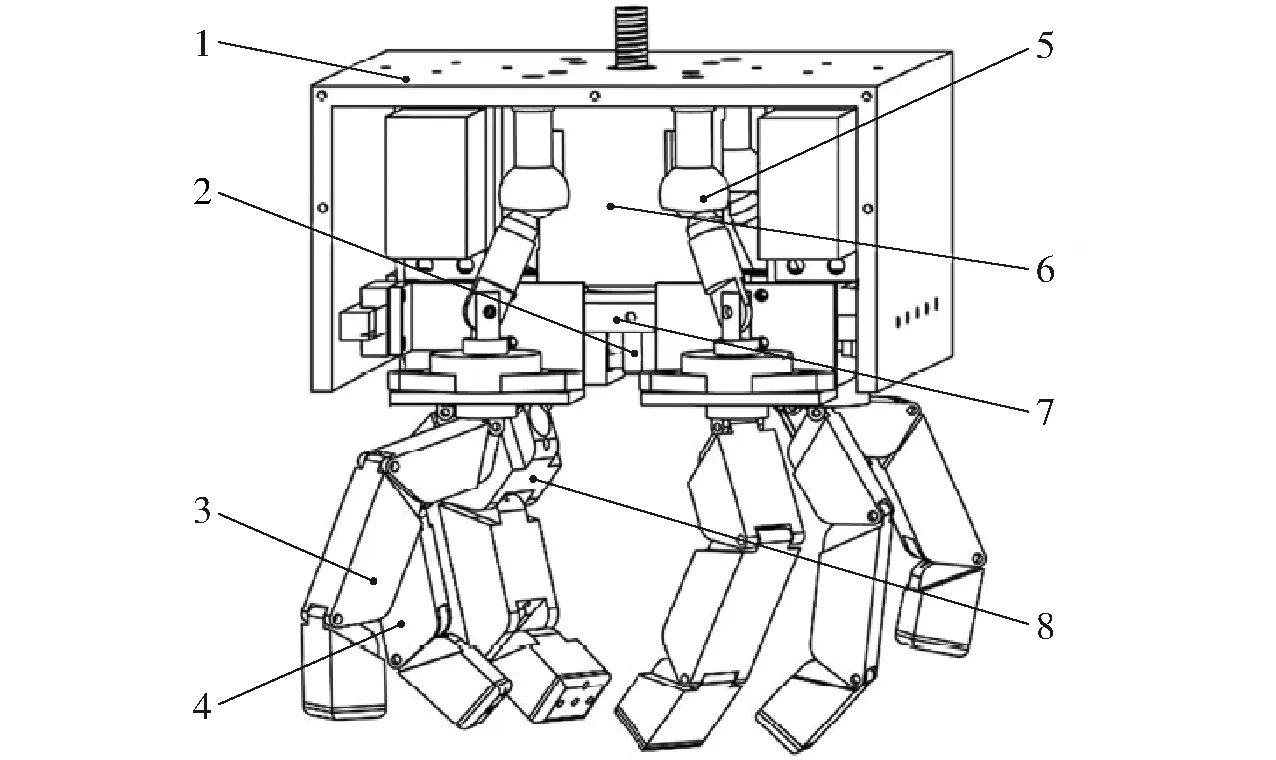
圖3 多功能蜓爪式仿生末端執行器主體結構示意圖Fig.3 Body structure diagram of multifunctional dragonfly claws form biomimetic end effector1.框架式機械平臺 2.凸輪機構 3.機械手前爪 4.機械手中爪 5.球鉸 6.伺服電機 7.滑塊機構 8.機械手后爪
在抓取果蔬時,在伺服電機驅動力作用下,6根高強度柔性鐵絲收緊,帶動爪指向內收緊,實現繩索傳動。當機械手接觸到果蔬時,通過傳感器的力值反饋調節伺服電機的轉動幅度,從而調節爪指內部的高強度柔性鐵絲的收緊或舒張,進而實現對不同尺寸、不同形狀的果蔬進行穩定并柔順抓取的目的。
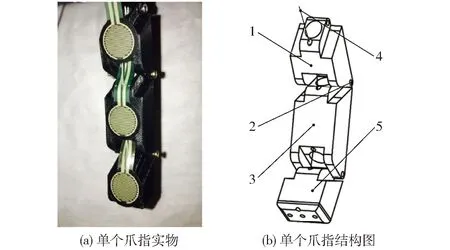
圖4 末端執行器單個爪指Fig.4 Single finger of end effector1.腿節 2.扭簧 3.脛節 4.柔性鐵絲 5.跗節
其次,通過伺服電機下方裝有的盤形凸輪機構,控制機械手前后2對爪指相對于中爪的角度,使機械手適應不同形態的果蔬。其中,凸輪機構、球鉸及滑塊機構等機構用作導向機構時,可使工作機構產生復雜的運動軌跡。如圖5所示,在蜓爪式仿生末端執行器中固定有平底推桿盤形凸輪,通過平底推桿盤形凸輪與機械手轉節滑塊相對位置的改變,以及彈簧對機械手轉節滑塊的約束,實現機械手轉節滑塊在滑道上的往復直線運動,使爪指產生平面移動。故凸輪曲線的設計尤為重要,根據蜓爪式機械手的手指運動要求,凸輪曲線選擇對稱的類橢圓形曲線。
滑塊運動軌跡為平面軌跡,球鉸以角度φ作錐擺運動,φ為30°,所以球鉸的工作區間應為1/4圓。且球鉸的擺動越接近工作區間的極值,機械手對果蔬的適應性越高,但不應超過死點位置,故取極限點為最優值。

圖5 仿生末端執行器俯視圖Fig.5 Bionic views of end effector
如圖6所示,球鉸與軸承距離AB即L1為6 mm,L1在凸輪平面上的投影為L2,L2=L1sinφ,φ=30°,故L2為3 mm。軸承與滑道的距離BD或CE即d1設計為37 mm,異側球鉸之間距離d2為110 mm。
類橢圓形曲線的長軸是橢圓上距離最遠的兩點之間的連線,短軸是橢圓上距離最遠的兩點之間的連線,由圖6幾何關系可得
2a=d2+2L2-2d1
(1)
2b=d2-2d1
(2)
經計算,該橢圓曲線的a為21 mm,b為18 mm。所以該機械手凸輪曲線設計為a=21 mm,b=18 mm的類橢圓形曲線。這極大地優化了爪指改變相對位置的運動形式,使之更靈活地適應不同種類、不同大小的果蔬。

圖6 凸輪設計參數示意圖Fig.6 Diagram of designing parameters of cam
3 蜓爪式仿生末端執行器結構分析
3.1 末端執行器抓取原理
末端執行器中手指和關節數量十分重要,末端執行器的自由度越多,抓取越為靈活,效果更佳,然而在傳統的機械手中,通常設計為全驅動機構,即驅動器數目和關節自由度數相等。但由于目前的技術還不能夠將驅動電動機做到十分輕巧[22],為降低電動機的質量與能耗,縮減機械手體積,提高性價比,本文采用欠驅動仿生機械手,使固定在機械手各爪節內槽中的高強度柔性鐵絲收緊或舒張,達到輕柔的抓取不同形狀果蔬的目的。此多功能仿生蜓爪式末端執行器能夠實現包絡抓取,對不同形狀的被抓取物體具有自適應性。
欠驅動機械手的每個手指均由3個關節構成,如圖7所示,分別命名為腿節、脛節和跗節。其中單個爪指的工作原理抽象并簡化為圖8所示的簡圖。
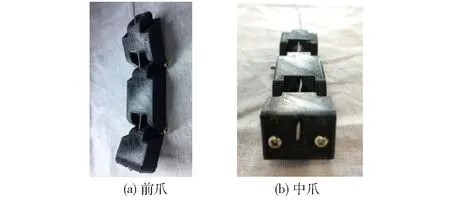
圖7 末端執行器單個爪指實物圖Fig.7 Physical map of single finger of end-effector
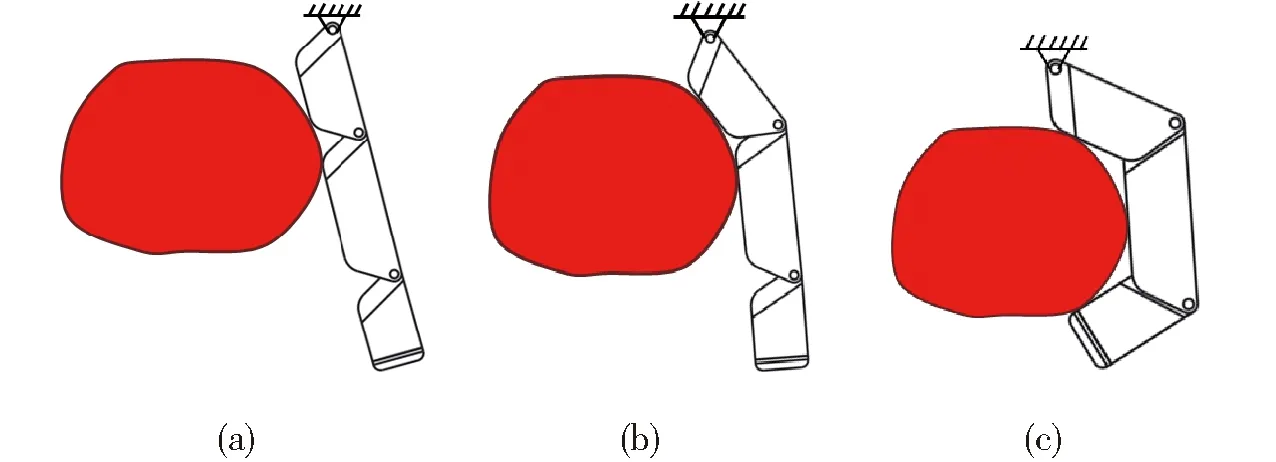
圖8 末端執行器單個爪指的抓取過程Fig.8 Grasping process of single claw finger of end effector
各關節及連桿間以轉動副的方式鉸接,在驅動力作用下,指節內槽內側高強度柔性鐵絲收緊,各腿節依次與被抓物體表面相貼合,通過與物體接觸,貼附在指節上的力傳感器測出力值,達到臨界值時,電動機停止轉動,柔性鐵絲停止收緊,完成抓取過程。
3.2 末端執行器的包絡抓取
當手爪進行包絡抓取時,在驅動力作用下腿節開始轉動,當腿節接觸物體時,如圖9a所示,在壓力達到一定值后,腿節停止轉動,之后角δ1保持不變。隨后,若脛節沒有接觸被抓物體,機械手脛節開始相對腿節轉動,這一過程中跗節相對脛節不轉動。當脛節接觸物體,并且壓力達到一定值后,脛節停止運動,接觸后角δ2保持不變。最后,如圖9b所示,機械手跗節也接觸到物體,壓力達到一定值后,跗節也停止運動,之后角δ3保持不變,此時機械手完成包絡抓取。而在這過程中腿節與脛節鉸鏈處的扭簧被壓縮,壓縮所產生的反作用力使相鄰關節即脛節運動更為平緩,增加了抓取時的柔性。

圖9 腿節、跗節接觸物體示意圖Fig.9 Diagram of contacting objects of femur and tarsal
3.3 爪指各參數確定
根據仿生學原理,通過對蜻蜓爪指大量實驗以及數據采集,得出所要仿生的機械爪爪指各指節的比例,如表1所示,由于該機械手前后爪主要起到抓取作用,故取前后爪的爪指進行分析,截取與爪指接觸面相垂直并平分的截面進行分析,提高可移植性。
圖10中,a2∶a3∶a4=13∶17∶11。AB圓弧為半徑a2+a3+a4繞點O1旋轉δ1得到的軌跡,同理BC、CD圓弧的旋轉半徑分別為a3+a4和a4。
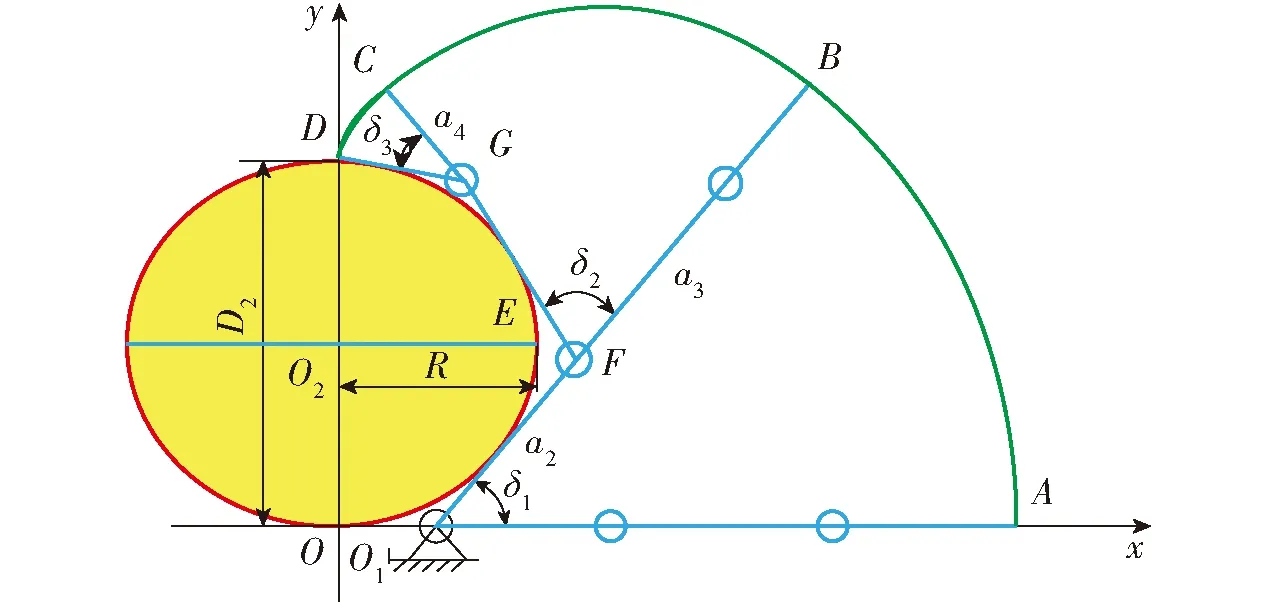
圖10 機械手前爪單根爪指工作空間的x-y截面Fig.10 x-y section of single robot forepaw workspace
假設被抓物體為球形,則D2=2R;由圖10分析可知,此時,需滿足單根爪指3個指節的y軸投影長度之和大于等于果蔬縱向截面直徑D2;爪指基座與原點O之間距離d′和腿節長度a2在x軸投影長度之和應大于果蔬縱向截面半徑R;并且經簡易試驗測定,該機械手抓取時,各指節的活動范圍為δ1∈[30°,60°]、δ2∈[15°,30°]、δ3∈[0°,15°],并且跗節長度a4在x軸方向投影的長度應大于或等于R/3。
根據幾何關系和相關實際假設,可得出
(3)
式中δ1——O1F繞O1點旋轉角度δ2——FG繞F點旋轉角度δ3——GC繞G點旋轉角度a3——脛節長度
由式(3)可得
(4)
式(4)成立需滿足
(5)
若
a2=13ka3=17ka4=11k
可得
(6)
式中D——各類果蔬縱向直徑最大值的算術平均值
即k=0.039 59D。
不同果蔬的直徑各不相同,可根據相應直徑調整爪指長度。為增加該仿生末端執行器包絡區域的體積,取各類果蔬直徑最大值為設計參數,使之基本適應各種形狀果蔬。取番茄和蘋果兩種常見普通類球狀果蔬以及茄子和柿子椒2種常見普通條狀果蔬作為參考樣本。
普通番茄最大縱向直徑d1≈65.9 mm、柿子椒最大縱向直徑d2≈79.9 mm、蘋果最大縱向直徑d3≈76.65 mm、茄子最大縱向直徑d4≈60.95 mm,故取D≈70.85 mm,故可得k=2.804 951 5 mm。
則a2=36.464 37 mm,a3=47.684 18 mm,a4=30.854 47 mm,經圓整后得a2=36 mm,a3=48 mm,a4=31 mm。
3.4 末端執行器運動模型的建立及求解
為分析機械手是否能夠完全包絡各種形態果蔬的主要抓取部位,并更好地分析和理解末端執行器的運動規劃,本文從單根爪指入手,進行運動模型的建立,最后繪制出機械手工作空間。
該機械手為欠驅動機械手,所以具有4個類關節自由度。為表示各關節間的相對位置和姿態,采用D-H法[24]建立桿件坐標系。此坐標系由機械手爪指任意位置狀態得到,如圖11所示。
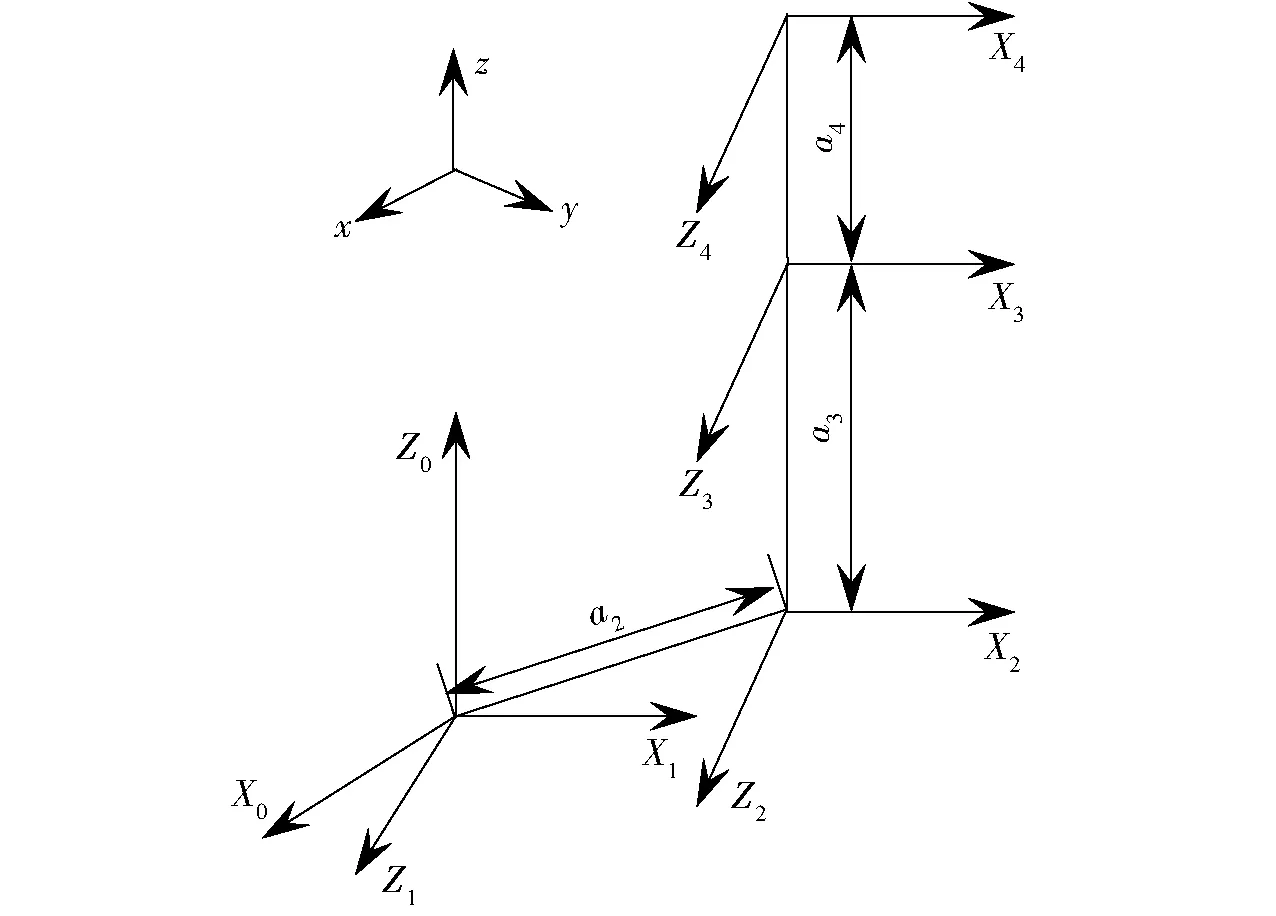
圖11 機械手爪指連桿坐標系Fig.11 Manipulator link coordinate system
根據D-H法建立坐標系原則可得

表2 末端執行器單根爪指關節變量參數Tab.2 Joint variable parameters of single finger of end effector
注:θ表示旋轉關節的關節變量,d表示滑動關節的關節變量。
(7)

圖12 末端執行器的工作空間Fig.12 Operating space of end effector
根據表1關節變量參數,建立末端執行器單根爪指運動學方程為
(8)
令

(9)
其中
(10)
式中P——末端執行器跗節末端質心相對于基坐標的姿態矩陣
R——末端執行器跗節末端質心相對于基坐標的位置向量
求解式(10)等號右端各元素相應表達式為
(11)
其中
C234=cos(θ2+θ3+θ4)
S234=sin(θ2+θ3+θ4)
C23=cos(θ2+θ3)
3.5 末端執行器運動包絡空間分析
為分析末端執行器的靈活度以及對果蔬包絡抓取的能力,利用式(11)繪制機械手的工作空間。工作空間通常指末端執行器末端質心所能達到的空間點集合[25],而機械手的實際工作空間是反應末端執行器運動靈活程度的重要指標之一。
為保證末端執行器適應各種形狀果蔬,其包絡空間應滿足一定范圍。末端執行器單根爪指的各個關節之間可運動角度是有一定范圍的,其中θ1∈[0,90°]、θ2∈[0,90°]、θ3∈[0,90°]、θ4∈[0,90°];而a1=36 mm,a2=48 mm,a3=31 mm。
采用隨機概率蒙特卡羅方法[26]求解末端執行器運動空間,使θ在其范圍內依次等間隔取值變化,間隔為1°,根據運動學模型中末端執行器單根爪指的位姿矩陣P,依次求出手臂末端質點坐標值,用Matlab繪制末端執行器末端質心的三維運動空間,如圖12所示。
由圖12可知,該六指末端執行器通過凸輪變換可包絡不同形狀水果,能夠達到完全包絡各種形態果蔬的主要抓取部位的要求,并且該機械手通過力傳感器也可控制抓取力,不會損傷果蔬,實現抓取靈活、柔順和穩定。
4 蜓爪式仿生末端執行器抓取試驗
4.1 機械手系統構成
完成機械手的機械設計后,需要設計相應的控制系統使機械手具備抓取功能。本文所述的末端執行器控制系統硬件主要由單片機、力傳感器、小型伺服電機以及配套的驅動器和上位機組成,控制系統簡圖如圖13所示。

圖13 控制系統簡圖Fig.13 Diagram of control system
本文設計的多功能蜓爪式仿生末端執行器的驅動源采用小型伺服電機,并且結合設計要求,控制系統需要實現的功能主要包括:動作控制、數據采集以及數據通信。該末端執行器選用2個STC15F2K60S2型單片機作為智能機器人的核心控制器,解決了單個處理器處理能力不足與信息量過大之間的矛盾。
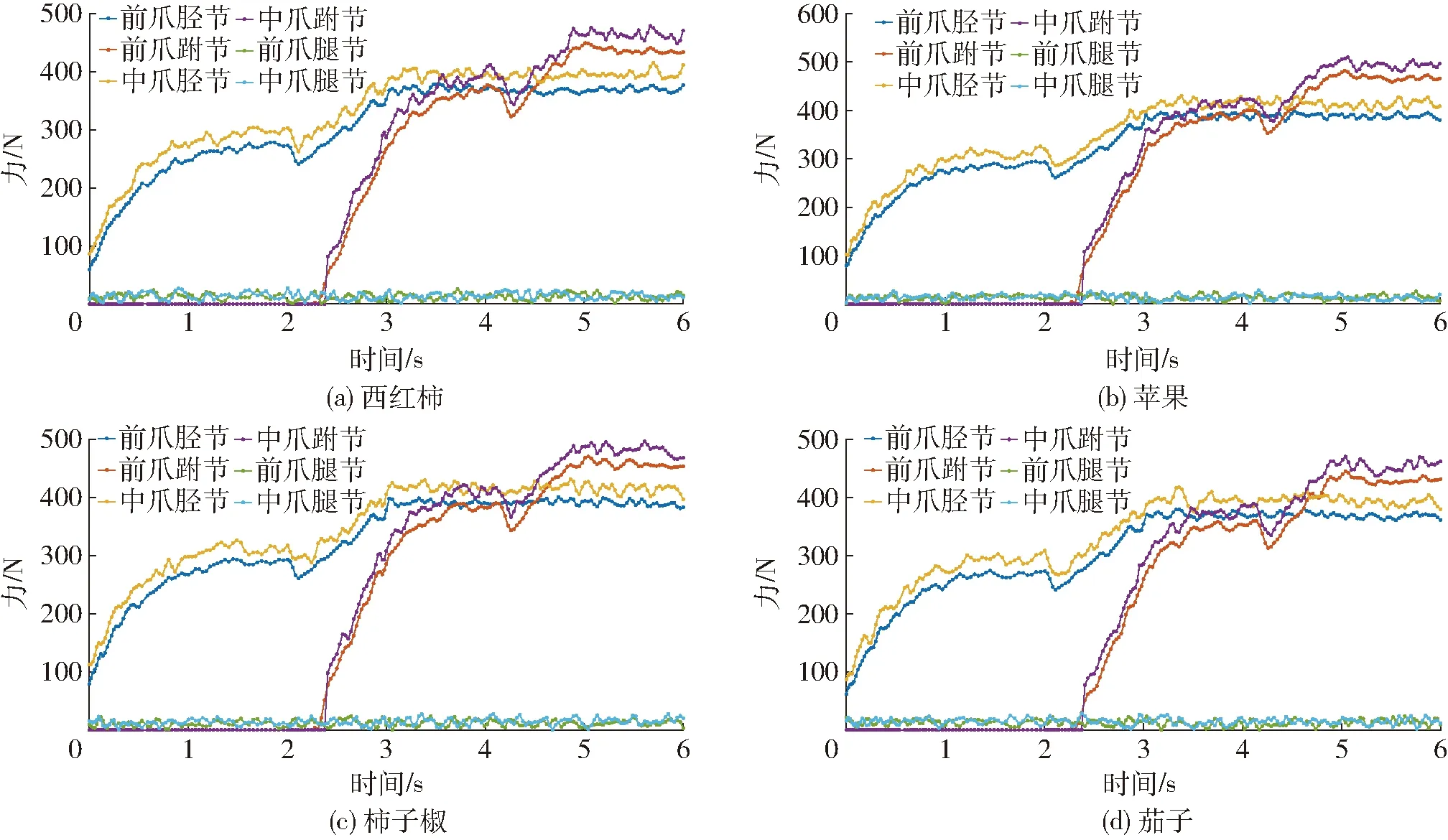
圖14 4種果蔬的極限力曲線Fig.14 Limit force curves of four kinds of fruits and vegetables
首先,由攝像頭采集的數據經圖像處理后,判斷果蔬為條狀還是橢球狀,控制中間伺服電機轉動,帶動凸輪機構以及滑塊等導向機構,使爪指達到相應抓取姿態;然后通過兩邊伺服電機的轉動,帶動柔性鐵絲收緊,使爪指開始貼靠被抓物體;最后,當接觸力達到設定好的極限力時,伺服電機停止轉動,機械手停止抓取,完成抓取過程。
4.2 試驗測定抓取極限力
機械損傷是破壞果蔬的主要形式,但由于絕大多數果蔬都表現出粘彈性的性質,故通過對果蔬靜載損傷與力學特性的研究,定義出損傷率,能提高對果蔬的保護,避免損傷。當果蔬加載到一定程度時,會產生蠕變變形,尤其在搬運、長途運輸或儲藏時,這些變形的部分更容易損傷及腐爛,本文中的損傷是指在抓取果蔬時,若其爪指各力傳感器所反饋的力超過通過實驗得出果蔬小變形的力時,產生不可恢復變形即認為果蔬已損傷。
采用靜態抓取破壞試驗,測定在抓取產生小變形時各爪指力傳感器的值。試驗以在農貿市場隨機采購的成熟番茄和蘋果兩種常見普通類圓形果蔬,以及茄子和柿子椒兩種常見普通條狀類果蔬為實驗樣本。試驗開始前,對果蔬拍照留下樣本原始模樣,然后機械手開始抓取果蔬,通過爪指上附著的力傳感器與果蔬的接觸來測量力的變化,繪制出曲線圖,找出果蔬應力松弛點,確定各個傳感器抓取力極限值;最后拍攝果蔬損壞照片,進行前后對比。
設計的末端執行器有18個輸出量,在試驗階段,對各個爪指進行試驗測量,試驗后經過對比,機械手前后4根爪指受力情況基本一致,中爪兩根受力情況基本一致,故在抓取時只對前后爪一根爪指與其中一根中爪進行力傳感器貼片,并對這2根爪指所有關節進行接觸力試驗,測量果蔬的極限力。
如圖14所示,從試驗數據可以看出,抓取西紅柿的前爪脛節和跗節極限力分別為200、302 N,中爪脛節和跗節極限力分別為226、312 N;抓取蘋果的前爪脛節和跗節極限力分別為232、325 N,中爪脛節和跗節極限力分別為252、347 N;抓取柿子椒的前爪脛節和跗節極限力分別為176、321 N,中爪脛節和跗節極限力分別為201、338 N;抓取茄子的前爪脛節和跗節極限力分別為206、300 N,中爪脛節和跗節極限力分別為213、309 N;故將力傳感器的力值設定好,超過設定的值,伺服電機就停止轉動,機械爪完成抓取。
這樣各關節接觸力得到了控制,如圖15所示,前后爪脛節穩定在100 N左右,前后爪跗節穩定在160 N左右,中爪脛節穩定在120 N左右,中爪跗節穩定在150 N左右;其余腿節接觸力大小與10 N較為接近,與理想中情況較為符合。腿節的接觸力很小并且始終沒有很大變化,脛節和跗節受力明顯,但爪指可以確保抓取的穩定柔順性,大大降低了損傷率。

圖15 前爪與中爪腿節、脛節和跗節接觸力控制曲線Fig.15 Contact force controlling curves of forepaw femora, tibia and tarsus
4.3 蜓爪式仿生末端執行器抓取試驗

圖16 末端執行器抓取試驗Fig.16 Grabbing experiments of end-effector
試驗以在農貿市場隨機采購的成熟番茄和蘋果兩種常見普通類圓形果蔬,以及茄子和柿子椒兩種常見普通條狀類果蔬為試驗樣本。并在購選當天在東北農業大學農業機器人研究室進行試驗。番茄平均豎向截面直徑為65.90 mm;蘋果平均豎向截面直徑為76.65 mm;茄子平均豎向截面直徑為60.95 mm;柿子椒平均豎向截面直徑為79.90 mm;彎曲率基本小于5°。
圖16為抓取試驗場景,圖17為抓取不同果蔬時的末端執行器抓取姿態,圖18為末端執行器抓取時近景圖。試驗分為并聯機構試驗和串聯機構試驗兩部分,分別在并聯機器人末端連接和串聯機器人末端連接的情況下分別進行果蔬抓取試驗。
為檢驗機械手對抓取物體的廣泛適應性,試驗時人為地將多種果蔬以任意位置、任意姿態擺放于傳送帶識別和抓取區域之間,多種果實擺放數量不限,依次對番茄、蘋果、茄子和柿子椒進行70次拾放試驗,并記錄試驗結果。
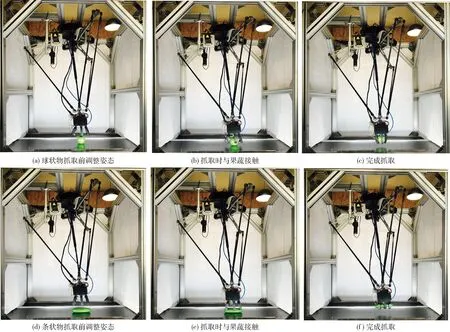
圖17 末端執行器抓取過程Fig.17 End-effector grasp processing
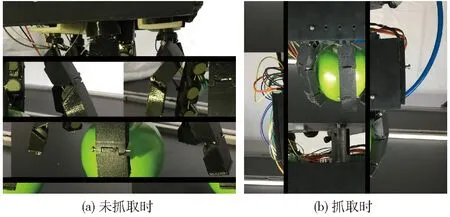
圖18 抓取果蔬近景圖Fig.18 Close range images of grabbing fruits and vegetables
4.4 抓取試驗結果分析
由表3可知,試驗中,果蔬一次抓取平均成功率基本為85%以上,番茄抓取平均成功率為90.7%,大于蘋果抓取平均成功率(88.6%),大于柿子椒抓取平均成功率(87.9%),大于茄子抓取平均成功率(87.2%);平均抓取損傷率在5%以下,番茄抓取損傷率為4.3%,大于柿子椒抓取損傷率(3.6%),大于茄子抓取損傷率(2.1%),大于蘋果抓取損傷率(0.7%)。
橫向對比來看,類條型果蔬的抓取成功率稍低于類球型,但相差不多,說明該機械手對各種形狀果蔬的適應性很高,基本實現了對不同尺寸、不同形狀果蔬的有效抓取。番茄和柿子椒的損傷率高于茄子和蘋果,但總體平均損傷率在5%以下,基本在保證抓取效率的前提下,有效地避免了末端執行器對果蔬的損害。

表3 末端執行器抓取試驗結果Tab.3 Results of end effector grabbing experiment %
縱向對比來看,末端執行器在串聯機構平臺的抓取成功率以及果蔬損傷率都略低于并聯機構平臺,結果表明:機械手對靜止目標的采摘能力高于對運動目標的撿拾能力,說明運動對果蔬抓取稍有影響,但影響不大,總體來看抓取果蔬的穩定性很好,可以實現柔順并穩定抓取物體。
5 結論
(1)引入仿生元素,通過在體式顯微鏡下觀察,把蜻蜓抓取時的物理信息轉換為具有指導意義的數據和量化模型,經理論分析得出機械手前后爪腿節、前后爪脛節與前后爪跗節長度比為13∶17∶11,長度分別為36、48、31 mm。機械手中爪腿節、中爪脛節與中爪跗節的長度比為17∶17∶13,長度分別為48、48、36 mm。
(2) 參照結構設計參數,搭建出實物,進行了靜態抓取破壞試驗,畫出極限力值曲線得出各傳感器極限力,達到抓取不損傷果蔬的效果;并且在實驗室內搭建了并聯機構平臺與串聯機構平臺作為載體進行抓取性能試驗,試驗結果表明:在并聯機構平臺與串聯機構平臺中,機械手對番茄、蘋果、柿子椒和茄子的抓取平均成功率分別為90.7%、88.6%、87.9%和87.2%,機械手對番茄、蘋果、柿子椒和茄子的平均損傷率分別為4.3%、0.7%、3.6%和2.1%。可見該仿生末端執行器能夠較好地實現對各種形態果蔬柔順、穩定的無損抓取。
1 NAOSHI K, KOKI Y, MICHIHAISA I, et al. Development of an end-effector for a tomato cluster harvesting robot[J]. Engineering in Agriculture, Environment and Food, 2010, 3(1):20-24.
2 近藤直,門田充司,野口伸,等.農業機器人:II.機構和實例[M].孫明,李民贊,譯. 北京:中國農業大學出版社,2009.
3 CHO S I, CHANG S J, KIM Y Y, et al. Development of a three-degrees-of-freedom robot for harvesting lettuce using machine vision and fuzzy logic control[J]. Biosystems Engineering, 2002,82(2): 143-149.
4 KONDO N, TING K C. Robotics for plant production [J]. Artificial Intelligence Review, 1998, 12(1-3): 227-243.
5 劉繼展,李萍萍,李智國.番茄采摘機器人末端執行器的硬件設計[J].農業機械學報, 2008, 39(3): 109-112. LIU Jizhan, LI Pingping, LI Zhiguo. Hardware design of the end-effector for tomato harvesting robot[J]. Transactions of the Chinese Society for Agricultural Machinery, 2008, 39(3): 109-112. (in Chinese)
6 劉繼展,李萍萍,倪齊,等.番茄采摘機器人真空吸盤裝置設計與試驗[J].農業機械學報, 2010, 41(10): 170-173,184. LIU Jizhan, LI Pingping, NI Qi, et al. Test of the vacuum suction device for tomato harvesting robot [J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(10): 170-173, 184. (in Chinese)
7 HAYASHI S, SHIGEMATSU K, YAMAMOTO S, et al. Valuation of strawberry-harvesting robot in a field test [J]. Biosystems Engineering,2010, 105(2): 160-171.
8 傅隆生,張發年,槐島芳德,等.獼猴桃采摘機器人末端執行器設計與試驗[J/OL]. 農業機械學報,2015,46(3):1-8. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20150301&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2015.03.001. FU Longsheng, ZHANG Fanian,GEJIMA Yoshinori,et al.Development and experiment of end-effector for Kiwifruit harvesting robot[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2015,46(3):1-8. (in Chinese)
9 劉長林,張鐵中,楊麗.茄子采摘機器人末端執行器設[J].農機化研究,2008(12): 62-64. LIU Changlin, ZHANG Tiezhong, YANG Li. Design of end-effectors of eggplant harvesting robot [J]. Journal of Agricultural Mechanization Research, 2008(12): 62-64.(in Chinese)
10 李秦川,胡挺,武傳宇,等.果蔬采摘機器人末端執行器研究綜述[J].農業機械學報, 2008, 39(3): 175-179. LI Qinchuan, HU Ting, WU Chuanyu, et al. Review of end-effectors in fruit and vegetable harvesting robot[J]. Transactions of the Chinese Society for Agricultural Machinery, 2008, 39(3): 175-179. (in Chinese)
11 ZHAO Dean, Lü Jidong, JI Wei, et al. Design and control of an apple harvesting robot[J]. Biosystems Engineering, 2011,110(2):112-122.
12 BULANON D M, KATAOKA T. Fruit detection system and an end effector for robotic harvesting of Fuji apples[J]. Agricultural Engineering International: CIGRE-Journal, 2010, 12(1): 203-210.
13 張凱良,楊麗,張鐵中. 草莓收獲機器人采摘執行機構設計與試驗[J].農業機械學報,2011,42(9): 155-161. ZHANG Kailiang, YANG Li, ZHANG Tiezhong. Design and experiment of picking mechanism for strawberry harvesting robot[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(9): 155-161. (in Chinese)
14 顧寶興,姬長英,王海青,等.智能移動水果采摘機器人設計與試驗[J/OL].農業機械學報,2012,43(6): 153-160. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20120628&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2012.06.028. GU Baoxing, JI Changying, WANG Haiqing, et al. Design and experiment of intelligent mobile fruit picking robot[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(6): 153-160. (in Chinese)
15 SCARFE A J, FLEMMER R C, BAKKER H H, et al. Development of an autonomous kiwifruit picking robot[C]∥Proceedings of 4th International Conference on Autonomous Robots and Agents, ICARA 2009, 2009: 380-384.
16 楊慶華,金寅德,錢少明,等.基于氣動柔性驅動器的蘋果采摘末端執行器研究[J].農業機械學報, 2010, 41(9): 154-158. YANG Qinghua, JIN Yinde, QIAN Shaoming, et al. Research on end-effector of apple picking based on new flexible pneumatic actuator [J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(9): 154-158. (in Chinese)
17 鮑官軍,張水波,陳亮,等.基于氣動柔性驅動器的球果采摘末端抓持器[J/OL].農業機械學報, 2013, 44(5): 242-246. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20130542&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2013.05.042. BAO Guanjun, ZHANG Shuibo, CHEN Liang, et al. Design of spherical fruit end-grasper based on FPA[J/OL] . Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(5): 242-246. (in Chinese)
18 葉敏,鄒湘軍,蔡沛鋒,等.水果采摘機器人通用夾持機構設計[J].農業機械學報, 2011, 42(增刊): 177-180. YE Min, ZOU Xiangjun, CAI Peifeng, et al. Clamping mechanism of fruits harvesting robot[J].Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(Supp.): 177-180. (in Chinese)19 姬偉,羅大偉,李俊樂,等. 果蔬采摘機器人末端執行器的柔順抓取力控制[J]. 農業工程學報,2014, 30(9): 19-26. JI Wei, LUO Dawei, LI Junle, et al. Compliance grasp force control for end-effector of fruit-vegetable picking robot[J]. Transactions of the CSAE,2014, 30(9): 19-26. (in Chinese)
20 金波,林龍賢. 果蔬采摘欠驅動機械手爪設計及其力控制[J].機械工程學報,2014,50(19):1-8. JIN Bo, LIN Longxian. Picking underactuated manipulator design and force control [J]. Journal of Mechanical Engineering, 2014,50(19):1-8.(in Chinese)
21 傅隆生,張發年.獼猴桃采摘機器人末端執行器設計與試驗[J/OL].農業機械學報, 2015, 46(3): 1-8. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20150301&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2015.03.001. FU Longsheng, ZHANG Fanian. Kiwifruit picking robot design and test [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(3): 1-8. (in Chinese)
22 BIRGLEN L, GOSSELIN C M. Kinetostatic analysis of underactuated fingers [J]. IEEE Transactions on Robotics and Automation, 2004, 20(2): 211-221.
23 李青,王青. 3D打印:一種新興的學習技術[J].遠程教育雜志,2013(4):29-35. LI Qing, WANG Qing. 3D printing: an emerging learning technology[J]. Distance Education Magazine, 2013(4):29-35.(in Chinese)
24 蔡自興. 機器人學[M].北京: 清華大學出版社, 2009.
25 曹毅,王樹新,邱燕,等. 面向靈活工作空間的顯微外科手術機器人設計[J].機器人, 2005, 27(3): 220-225. CAO Yi, WANG Shuxin, QIU Yan, et al. Dexterous workspace oriented design of robotic manipulators for Microsurgery [J]. Robot, 2005, 27(3): 220-225. (in Chinese)
26 張建中. 蒙特卡洛方法[J].數學的實踐與認識, 1974, 42(1): 28-40. ZHANG Jianzhong. Monte Carlo method [J]. Mathematics in Practice and Theory, 1974, 42(1): 28-40. (in Chinese)
27 TONG Jin, SUN Jiya, CHEN Donghui, et al. Biommetics in soft terrain machines a review[J]. International Agricultural Engineering Journal, 2004, 13(1-2):71-86.
Design and Test of Multifunctional Dragonfly Claws Form Bio-mimetic End Effector
QUAN Longzhe1ZHAO Lin2LI Xinghui1ZHANG Chuanbin1WANG Jiansen1CHENG Gong1
(1.CollegeofEngineering,NortheastAgriculturalUniversity,Harbin150030,China2.CollegeofBiosystemsEngineeringandFoodScience,ZhejiangUniversity,Hangzhou310058,China)
In order to use the same end-effector to grasp fruits and vegetables which have various shapes and effectively avoid the end-effector damaging fruits and vegetables under the premise of ensuring capture efficiency, a kind of multifunctional dragonfly claws form biomimetic end effector was designed. Firstly, the relevant physical information of each claw finger of dragonfly was transformed into a data and quantitative model by using a stereomicroscope, and the size of the end of femur was determined through theoretical analyzing, actuating design, modeling and optimization of structure parameters, the length of mechanical front claw’s femur, tibia and the tarsus were 36 mm, 48 mm and 31 mm, respectively, and mechanical median claw’s femur, tibia and tarsus length were 48 mm, 48 mm and 36 mm, respectively. Meanwhile, D-H method was adopted to establish the motion model of the end-effector, and draw the envelope space region of end-effector. The results turned out that the manipulator can fully envelop the main parts of various fruits and vegetables. Finally, the static load test which was on the platform of parallel-mechanism and serial-mechanism was carried out to determine the ultimate stress, and the fruit as well as vegetable grabbing test was also carried out. The average capturing success rates of mechanical hand on the tomato, apple, pepper and eggplant were 90.7%, 88.6%, 87.9% and 87.2%, respectively, and the average damage rates were 4.3%, 0.7%, 3.6% and 2.1%, respectively. The test results showed that the end effector realized the effect of using the same mechanical hand to grab many kinds of fruits and vegetables stably and smoothly.
dragonfly; bionics; end-effector; under-actuated; D-H method; grabbing experiment
10.6041/j.issn.1000-1298.2017.08.003
2017-01-26
2017-05-15
國家自然科學基金項目(51405078)、中國博士后科學基金項目(2014M561318)、黑龍江省博士后基金項目(LBH-Z13022)和東北農業大學學術骨干項目(518020)
權龍哲(1980—),男,副教授,博士,主要從事智能農業裝備研究,E-mail: quanlongzhe@163.com
S23
A
1000-1298(2017)08-0033-10
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
