基于嵌入式系統(tǒng)的異纖清除機設計與試驗
2017-08-31 15:28:49孫世磊石文軒鄧德祥
農(nóng)業(yè)機械學報 2017年8期
張 晨 孫世磊 石文軒 曾 霖 鄧德祥
(1.武漢大學電子信息學院, 武漢 430072; 2.武漢大學國際軟件學院, 武漢 430072; 3.武漢大學遙感信息學院, 武漢 430072)
基于嵌入式系統(tǒng)的異纖清除機設計與試驗
張 晨1孫世磊2石文軒3曾 霖1鄧德祥1
(1.武漢大學電子信息學院, 武漢 430072; 2.武漢大學國際軟件學院, 武漢 430072; 3.武漢大學遙感信息學院, 武漢 430072)
基于FPGA+DSP的嵌入式系統(tǒng)以其靈活的芯片選型和高功效的計算性能,適合在環(huán)境惡劣以及對系統(tǒng)在線實時運行有嚴格要求的農(nóng)業(yè)分揀領域中應用。針對棉紡產(chǎn)線中的異纖清除機設計,從檢出原理、系統(tǒng)軟硬件和剔除系統(tǒng)方面討論了基于嵌入式系統(tǒng)的設備設計。檢出原理方面,除常見的白光和紫外光檢測外,在不增加相機的情況下通過增加偏振通道來增強透明地膜檢測。在系統(tǒng)軟件設計方面,提出了基于三線陣相機亞像素空間分離量測速方案和基于統(tǒng)計學習的閾值檢測。在系統(tǒng)硬件方面,設計了具有功耗和物料成本優(yōu)勢的嵌入式相機數(shù)據(jù)處理平臺,并移植優(yōu)化算法以滿足系統(tǒng)實時性需求。在剔除系統(tǒng)方面,設計了基于目標實時速度的控制方案。試驗結(jié)果表明,測速方案能正確獲取目標速度,并能在剔除系統(tǒng)測試中適應風速變化,準確打擊。設備對棉花帶有明顯差異的異纖及帶有熒光粉的丙綸絲和透明薄膜的檢出率高于80%,而對接近棉花顏色的淡黃色異纖檢出率稍低于80%。長期試驗結(jié)果顯示,異纖清除機能適應產(chǎn)線變化,操作簡便,能檢出國內(nèi)現(xiàn)有常見異纖,性能穩(wěn)定。
異纖清除機; 棉花異性纖維; 機器視覺; 嵌入式系統(tǒng); 亞像素空間分離校正
引言
毛發(fā)、丙綸絲、毛線、地膜、碎布等異性纖維(簡稱異纖)是影響棉紡產(chǎn)品質(zhì)量的重要雜質(zhì),如何快速準確的將混雜在原棉中的異纖分揀識別并挑選出來是棉紡行業(yè)最為關注的焦點之一[1-8]。作為農(nóng)業(yè)機械分揀設備中的一種,異纖清除機因能在線穩(wěn)定高效地剔除高速棉流中的異纖,而成為國內(nèi)生產(chǎn)線的主要設備。
在異纖清除機設計中,高速圖像數(shù)據(jù)處理系統(tǒng)設計與實現(xiàn)占有重要地位。農(nóng)業(yè)分揀設備工作現(xiàn)場通常高溫、高濕度、高粉塵,并常有將分揀設備嵌入原產(chǎn)線進行升級改造的需求,所以對設備的功耗和硬件穩(wěn)定性要求較高。此外圖像處理系統(tǒng)還需在線實時處理圖像數(shù)據(jù),并控制剔除系統(tǒng)進行檢出。針對上述應用特性,基于FPGA+DSP的嵌入式方案,因其在數(shù)學運算中突出的功耗效率比[9-12],具有支持硬實時應用(Hard real-time application)的能力,以及豐富的工業(yè)級芯片種類,適用于農(nóng)業(yè)分揀設備的低成本、小型化和高可靠性設計。
關于異纖檢測算法和系統(tǒng)設計的研究較多[1-8],但是針對在線實時性要求下的算法結(jié)構(gòu)設計,以及產(chǎn)線適應性的研究較少。針對嵌入式系統(tǒng)設計的研究多為處理系統(tǒng)的實現(xiàn)細節(jié)[13],有關整機系統(tǒng)層面的全面研究較少[14]。
本文基于異纖檢測檢出原理,通過分析拍攝圖像的特征,設計檢測算法,并著重研究能增強生產(chǎn)線適應性的技術。根據(jù)算法特點設計圖像處理硬件系統(tǒng)和剔除機構(gòu)控制方案。最終將包含嵌入式系統(tǒng)在內(nèi)的異纖清除機整機設備實現(xiàn),并安裝于實際生產(chǎn)線進行長期試驗和測試。
1 基于嵌入式系統(tǒng)的異纖清除機系統(tǒng)設計
1.1 異纖清除機整體設計
異纖清除機結(jié)構(gòu)如圖1所示,由輸棉管道、相機、光源、高壓噴閥以及除雜風機等組成。相機拍攝輸棉管道中被燈管從管道正反兩面照射的棉流,并在每組相機對面設置背景條以生成無棉覆蓋區(qū)域拍攝背景。

圖1 異纖清除機結(jié)構(gòu)圖Fig.1 Structure diagram of foreign fiber detecting machine1.輸棉管道 2.氣流方向 3.除雜風機 4.背景條 5.相機 6.白光/紫外光燈管 7.羽毛 8.丙綸絲 9.塑料薄膜 10.棉花 11.高壓噴閥 12.高壓氣流
1.2 異纖清除機檢出方案設計
傳統(tǒng)篩選感知系統(tǒng)由光電二極管和超聲波等方式實現(xiàn),隨著半導體行業(yè)的發(fā)展與升級,線陣相機被越來越廣泛地應用于檢測。文獻[4,6-7]采用高速線陣相機拍攝處于測試通道中移動的棉花。本文使用基于安森美公司KLI2113型傳感器的三線陣傳感器相機,該相機像元數(shù)為2 098,每通道像元點頻為20 MHz。經(jīng)過定制改造,在啟用三線空間校正模式下,相機行頻flinerate仍保持為最高的9.2 kHz[15]。
異纖的檢出原理主要利用棉花和異纖在不同光譜反射特性下的差異性,在實際應用中良好的光照方案可以突出檢測目標的特征,有效降低算法的復雜度。文獻[1]測試并總結(jié)了異纖的檢測波段,在實踐中常見的檢測方式為白光與紫外光[2]。本文在紫外光通道中增加偏振光通道,利用光測彈性的干涉效應提高透明薄膜的檢出率。此方案為紫外光偏振通道混合檢測,相機數(shù)量較原白光和紫外光方案并無增加,具體設置如圖2所示。

圖2 紫外光及偏振光路設置Fig.2 UV and polar illumination system1.相機 2.檢偏器 3.紫外光燈管 4.輸棉管道 5.被攝物體 6.起偏器 7.偏振光源
其中,紫外光燈管布置在輸棉管道兩側(cè);偏振燈管布置在相機拍攝的中線上,并與相機間設置起偏器、檢偏器2塊偏振玻璃;被攝物體與相機只間隔檢偏器。此光路設計中,原紫外檢測相機仍舊能透過檢偏器檢測熒光反應異纖,相對于文獻[16]中紫外與偏振相機分離方案,可在不增加相機數(shù)量的條件下增加透明薄膜的檢出率。增加偏振光路設計后,異纖檢出類型將覆蓋我國大部分常見異纖種類。
1.3 異纖檢測算法設計
典型目標檢測算法流程圖如圖3所示。

圖3 目標檢測算法流程圖Fig.3 Flow chart of target detection algorithms
為快速準確地提取目標,檢測算法通常采取由粗到精,算法復雜度由簡單到復雜的策略。圖3中前2步用于從全圖中快速提取出候選區(qū)域并初步確認,在計算上利用最明顯且簡單的方式,例如灰度統(tǒng)計、邊緣信息等確認目標的可能區(qū)域。后2步中,先利用精細特征,如尺寸、紋理、面積、不變矩、統(tǒng)計特征等對較小的候選區(qū)域進行運算量稍大的分析,去除誤判虛景后,得到檢測目標區(qū)域,然后根據(jù)特征提取分類方式如神經(jīng)網(wǎng)絡分類器等復雜算法對目標進行分類識別,從中挑選有價值目標。
根據(jù)檢測算法流程分析,目標確認算法輸出的檢測信息已經(jīng)能夠保證檢出效果,即使只有少量運用復雜度最高的目標分類識別算法,系統(tǒng)在安裝調(diào)試后也能達到較好的檢出率。按此思路設計的檢測算法并行度高,復雜度較低,較適合嵌入式方案實現(xiàn),但是算法設計時將更加依賴實際拍攝特征。所以設計算法時應從拍攝圖像特征出發(fā),設計算法流程,并著重增強算法對實際拍攝環(huán)境適應性。根據(jù)設備實際拍攝情況特性,可以得到下列圖像特征,用于算法流程設計:
(1)在白光、紫外光和偏振光設置中,異纖與棉花有色差或邊緣梯度差異。
(2)異纖數(shù)量相對于棉花數(shù)量為較小值,所以在統(tǒng)計上占主要部分的是棉花與背景值,經(jīng)過調(diào)試后,棉花與背景間的梯度和色差都較小。
(3)棉花種類變化時,拍攝圖像中棉花部分會發(fā)生變化,但異纖數(shù)量在總量中占比仍較小。
(4)根據(jù)異纖材質(zhì)不同,以及風速和附著棉團尺寸不同,實際速度會有差異。
基于上述4點圖像特征,本文設計的算法流程如圖4所示。

圖4 異纖檢測算法流程圖Fig.4 Flow chart of fiber detection algorithms
算法在設計時分為非實時性的閾值學習部分,以及有實時性要求的梯度空間及色差空間檢測部分。通過開機后的閾值學習,完成算法對生產(chǎn)線狀態(tài)的適應,然后進入檢測狀態(tài)完成異纖檢出,并定時重新學習閾值和統(tǒng)計棉速均值以適應生產(chǎn)線變化。
1.3.1 基于色差和梯度空間的目標檢測算法
根據(jù)檢出原理分析以及設備圖像特征,檢測算法可利用異纖與棉花在色差空間和梯度空間的特征區(qū)別進行設計[8]。在色差檢測中,可選擇將原始RGB空間的圖像數(shù)據(jù)轉(zhuǎn)化至較符合人眼感受的Lab空間進行色差分析。基于國際照明學會(CIE)的Lab均勻顏色空間定義,兩點間色差可表示為
(1)
式中 ΔL——兩點間L通道差值 Δa——兩點間a通道差值 Δb——兩點間b通道差值
為更好適應異纖清除機實際工作情況,分別對式(1)中的各變量差值增加權(quán)重系數(shù)。
(2)
其中
α+β=1
(3)
式中α、β——權(quán)重系數(shù),取值為0~1
通過式(2)、(3)調(diào)整各分量在色差計算中所占比例。
梯度空間轉(zhuǎn)化可用梯度算子實現(xiàn)。鑒于圖片中異纖的方向是隨機的,在設計中采用拉普拉斯算子提取梯度信息。該算子具有實現(xiàn)簡單、為同性微分算子且具有旋轉(zhuǎn)不變性的特點。一個二維圖像函數(shù)的標準拉普拉斯變換是各向同性的二階導數(shù),其離散形式為
f(x,y-1)-4f(x,y)
(4)

為保證檢出率,需對圖像中R、G、B3通道全部進行梯度空間轉(zhuǎn)化。
1.3.2 閾值選取算法設計
通過二值化對圖像進行分割時,閾值選取是難點,傳統(tǒng)研究的對象是挑選過的包含異纖的切片檢測數(shù)據(jù),此時大津法是最常用的計算圖像閾值的方法。但是在實際應用中棉花和背景在統(tǒng)計中占絕對主體部分,異纖僅占非常小的部分,若棉花與背景融合較好,則直方圖分布中只有一個波峰,此時需要直方圖中有2個波峰的大津法進行閾值提取效果不明顯。若采用更復雜的算法,計算量會有明顯的上升。為解決上述問題,在算法設計中可通過統(tǒng)計特性求取梯度或色差通道閾值。
圖5為安裝調(diào)試背景與棉花亮度后,產(chǎn)線正常走棉工況下的典型圖像。背景(紅點處)R、G、B值為112、113、112,棉花根據(jù)厚度可分為接近邊緣的較薄部分(綠點處)以及靠近中央較厚部分(藍點處),其R、G、B值分別為121、119、120和112、108、115。背景部分的梯度及色差差異接近于零,并且棉花與背景的交界處有較小的梯度及色差變化,此外棉花開松后的厚度是向中心逐漸緩慢增加,上述現(xiàn)象導致棉花表面圖像產(chǎn)生連續(xù)的變化,所以棉花及背景圖片的直方圖統(tǒng)計特性體現(xiàn)為:接近灰度值零點附近呈現(xiàn)概率分布較高的“尖峰”。實現(xiàn)中采用統(tǒng)計的方式,將梯度和色差檢測最末尾固定百分比的點對應值設定為閾值,并且根據(jù)工程經(jīng)驗設置最小保護值。在棉花發(fā)生變化后,雖然棉花與背景梯度及色差發(fā)生變化,但是異纖所占比例仍舊是一較小值。此方法在實踐中,能在大量無效的棉花和背景數(shù)據(jù)中高效率挑選疑似目標,通過調(diào)整閾值對應的百分比數(shù)值,即可保證不漏掉檢測目標。

圖5 背景、棉花與墨綠色異纖的現(xiàn)場拍攝圖Fig.5 Live shot of background, cotton and foreign fiber
1.3.3 目標測速算法設計
現(xiàn)場應用時疑似的目標速度與其所附著的棉團尺寸有關,為一變化值,并且目標速度影響圖像數(shù)據(jù)中檢出目標的實際縱向尺寸計算,如不能將每個檢出目標的速度信息及時更新,會造成大量誤判。文獻[17]描述了一種利用上下重疊放置的2臺相機,通過圖像匹配進行測速的方法。但是此方案需要增加一臺相機進行測速,并且疊放的2臺相機拍攝數(shù)據(jù)相同,無法提供更多信息。本文選用的三線陣相機含有空間分離的3條傳感器,通常在使用中,采用人工或測速裝置輸入速度信息,用以調(diào)整3條傳感器間的數(shù)據(jù)修正量,即空間分離量[18]。但是棉紡產(chǎn)線實際應用中,棉花在管道中高速運動,不能通過接觸式測量獲取速度,如簡單采用平均速度,不能準確體現(xiàn)目標信息,所以需要研究針對每個疑似目標的測速方案。
通過理論可推導目標速度V與三線陣相機空間分離量n、相機行頻flinerate以及光學放大率M的關系式為
(5)
式中u——物距,mmv——鏡頭焦距,mmΔd——三線陣傳感器中兩通道間距,文中取112 μm
當相機設置完畢后光學放大率和行頻為固定值,若能估算出兩通道間亞像素級空間校正值,即可計算得出拍攝目標的精確速度,并推知準確的目標縱向分辨率。
亞像素級三線分離量估算可以通過對相機拍攝圖像中不同譜段的數(shù)據(jù),使用基于灰度空間的歸一化相關系數(shù)(Normalized correlation coefficient, NCC)和魯棒性強的二次曲線擬合相結(jié)合的亞像素匹配算法推得,計算步驟如下:
(1)圖像I1和I2間相同大小,但是互相有位移的數(shù)據(jù)間歸一化相關系數(shù)的計算式為
(6)
式中F1、F2——圖像I1和圖像I2中區(qū)域面積相同的圖像數(shù)據(jù)
p——圖像區(qū)域的中心坐標點
wp——位移
(2)求取歸一化相關系數(shù)Φ(p,wp)的極值點,可首先對其最大值點及附近點使用二次曲面f(x,y)進行擬合估計。
f(x,y)=α5x2+α4y2+α3xy+α2x+α1y+α0
(7)
式中α0、α1、α2、α3、α4、α5——二次曲面擬合系數(shù)
引入擬合系數(shù)向量X,并結(jié)合式(7)可得
AX=B
(8)
其中X=[α5α4α3α2α1α0]T
(9)
(10)
B=[f0f1f2f3f4f5]T
(11)
向量X通過式(8)~(10)的偽逆矩陣法求得
X=(ATA)-1ATB
(12)
求得擬合系數(shù)向量X后,利用求導法,即可得到二次曲面f(x,y)的極值坐標(xmax,ymax),該坐標數(shù)值即為亞像素三線分離量。
(13)
由式(13)可推得極值點(xmax,ymax)與擬合系數(shù)的關系為
(14)
基于二次曲面擬合的亞像素匹配方法精度在文獻[19]中有討論,最大有0.1個像素點的誤差。
1.4 基于嵌入式系統(tǒng)的圖像數(shù)據(jù)處理系統(tǒng)設計
在相機數(shù)據(jù)處理板卡中,核心數(shù)據(jù)處理芯片的選型占重要地位。較常見的核心芯片構(gòu)架有:CPU/ARM、GPU、FPGA、DSP等。針對上述各芯片構(gòu)架的討論和應用,近年研究觀點如下:
(1)相較于CPU/ARM,DSP和GPU更適合進行大規(guī)模數(shù)學運算。在運算速率指標上,GPU高于DSP,但是在功耗效率指標上,DSP占有優(yōu)勢[9]。
(2)GPU相較FPGA在開發(fā)難度和高性能運算領域應用中優(yōu)勢明顯,而FPGA則能以較低的頻率實現(xiàn)如中值濾波等運算,功耗效率較GPU有優(yōu)勢[10]。
(3)在最新的報道中,也有使用GPU實現(xiàn)實時目標檢測的研究[11]。但是該報道中也存在如下問題:嵌入式GPU在開發(fā)時,只能以Nvidia TX1板卡套件或核心板形式進行,并不單獨提供GPU芯片供用戶自行設計電路系統(tǒng)。此外GPU應用時必須基于大型操作系統(tǒng)例如Linux,而Linux在硬實時應用中通常還需要額外改造[12]。
綜上所述,為了在線實時處理相機三通道輸出的60 MB/s的數(shù)據(jù),并考慮到設備功耗以及驅(qū)動剔除系統(tǒng)的硬實時需求,本文設計了如圖6所示的基于FPGA+DSP方案的嵌入式處理板卡,其中FPGA選用工業(yè)級EP3C55F23I7,DSP選用文獻[13]中DSP DM642的后續(xù)升級版本(工業(yè)級DM648),并使用輕量級硬實時TI-RTOS作為板卡操作系統(tǒng)。嵌入式板卡高速數(shù)據(jù)輸出選用千兆網(wǎng)口接口,增強板卡間組網(wǎng)能力,能簡易適配多相機方案,并能完成原始高速圖像數(shù)據(jù)輸出或算法檢測結(jié)果輸出。上述嵌入式板卡單塊功耗小于12 W。設計方案使用全工業(yè)級芯片實現(xiàn),并通過看門狗功能防止死機現(xiàn)象產(chǎn)生,在同樣可實時目標檢測的條件下系統(tǒng)功耗和成本相較其他方案有成本低和穩(wěn)定性好優(yōu)勢。

圖6 嵌入式處理板卡結(jié)構(gòu)框圖Fig.6 Structure diagram of embedded board
基于1.3節(jié)算法設計思路,可將算法中屬于數(shù)據(jù)預處理的部分:梯度空間轉(zhuǎn)換及色差空間轉(zhuǎn)換代碼,使用FPGA實現(xiàn),而將從二值化開始,包括游程編碼、基于連通域大小的特征提取、速度測算以及外接矩等算法部分由DSP實現(xiàn)。
原始數(shù)據(jù)分通道在FPGA內(nèi)完成由梯度算子卷積完成梯度轉(zhuǎn)換,并通過查找表轉(zhuǎn)換成Lab空間數(shù)據(jù)。上述兩類轉(zhuǎn)換數(shù)據(jù)加上原始相機數(shù)據(jù)總共為 180 MB/s數(shù)據(jù)傳輸至DSP。DM648系統(tǒng)共提供5路VPORT接口,本系統(tǒng)使用3路VPORT通道作為傳輸通道,其每路能提供最高為108 MHz的16 bit數(shù)據(jù)位寬。DSP與FPGA之間的配置信息不需要實時性傳輸,所以系統(tǒng)可選擇接口簡單的EMIF作為低速數(shù)據(jù)通路,F(xiàn)PGA在此接口下可作為DSP的外部存儲器使用。
在算法移植實現(xiàn)中,應充分發(fā)揮線陣相機數(shù)據(jù)流以行為單位輸出的特點。在梯度轉(zhuǎn)換處理中,F(xiàn)PGA端進行了緩存一行數(shù)據(jù)的處理,在Lab空間轉(zhuǎn)換中采用并行轉(zhuǎn)換方式,最終將數(shù)據(jù)按照DSP端接收協(xié)議格式擺放,并通過VPORT接口輸出數(shù)據(jù)至DSP進行算法處理。最終檢測數(shù)據(jù)通過DSP板千兆接口和交換機匯總于設備狀態(tài)顯示用簡易工控機,將檢測數(shù)據(jù)上傳云端服務器,供后續(xù)處理。
1.5 基于目標實時速度修正的剔除系統(tǒng)設計
分揀設備的執(zhí)行部分是機電結(jié)合部件,根據(jù)用途不同可有多種形式,文獻[13]中的果物分選設備需控制電磁鐵驅(qū)動的翻板,而本文設計的異纖清除機和常見的大米分揀機都使用電磁高壓氣閥作為吹出異物的執(zhí)行機構(gòu),其中噴閥啟動時機的選擇是關鍵問題。在噴閥啟動時機計算中,相機和噴閥間距由實際機械尺寸決定。風速、管道長以及各個步驟用時關系如圖7所示。

圖7 噴閥啟動時間計算示意圖Fig.7 Diagram of valve delay time calculation
圖7中總時長t0可用相機和噴閥間距除以檢測目標速度得出;t1用來表示異纖在圖像中的位置;t2為嵌入式板卡計算時間;t3表示信號從嵌入式板卡出發(fā)時刻與噴閥驅(qū)動信號發(fā)出的時間差;t4為噴閥啟動延時,用以建立氣壓,與噴閥本身屬性有關;t5用來增加小部分提前量以防拍攝的異纖只是部分暴露;噴閥啟動修正量t6為從總時長t0中除去之前所有分步耗時(t1~t5)的剩余時間。噴閥開啟時長可通過異纖實際長度和速度計算。
2 系統(tǒng)實驗與分析
2.1 閾值選取算法實驗與分析
設備設定開機后等待燈管預熱5 min為學習狀態(tài),并將50行數(shù)據(jù)作為一幀圖像,通過統(tǒng)計學習色差和梯度閾值,共學習55.2 k幀圖像,實際使用閾值通過統(tǒng)計得出,并設定最低值保護算法以免當無棉花情況下計算獲得過低閾值。學習時間結(jié)束后軟件進入檢測狀態(tài)。
圖8是現(xiàn)場3條產(chǎn)線正常運行時的歸一化梯度曲線。3條曲線對應的產(chǎn)線走棉量相當,都約為400 kg/h。由圖8可知,占圖像中主體部分的梯度都小于10。可將梯度10作為學習最小保護值,并取固定百分比的梯度作為二值化閾值,如在圖8中歸一化頻數(shù)取0.2時,產(chǎn)線2對應閾值為14,產(chǎn)線1和3對應為13。可見棉花和圖像背景調(diào)節(jié)的不同會造成統(tǒng)計時有少量差異,但是基于閾值學習后的閾值相近。閾值選取百分比可以通過軟件主界面靈敏度設置成比例調(diào)整,即可保證異纖基本不漏判。在更換棉花或光路照明稍有變化后,變化較多的是棉花與背景之間的絕對值變化,而背景、棉花、異纖之間統(tǒng)計關系不會有劇烈變化,異纖在棉花中所占比例仍是一個較小的值,設備通過學習新閾值即可初檢出所有疑似目標。
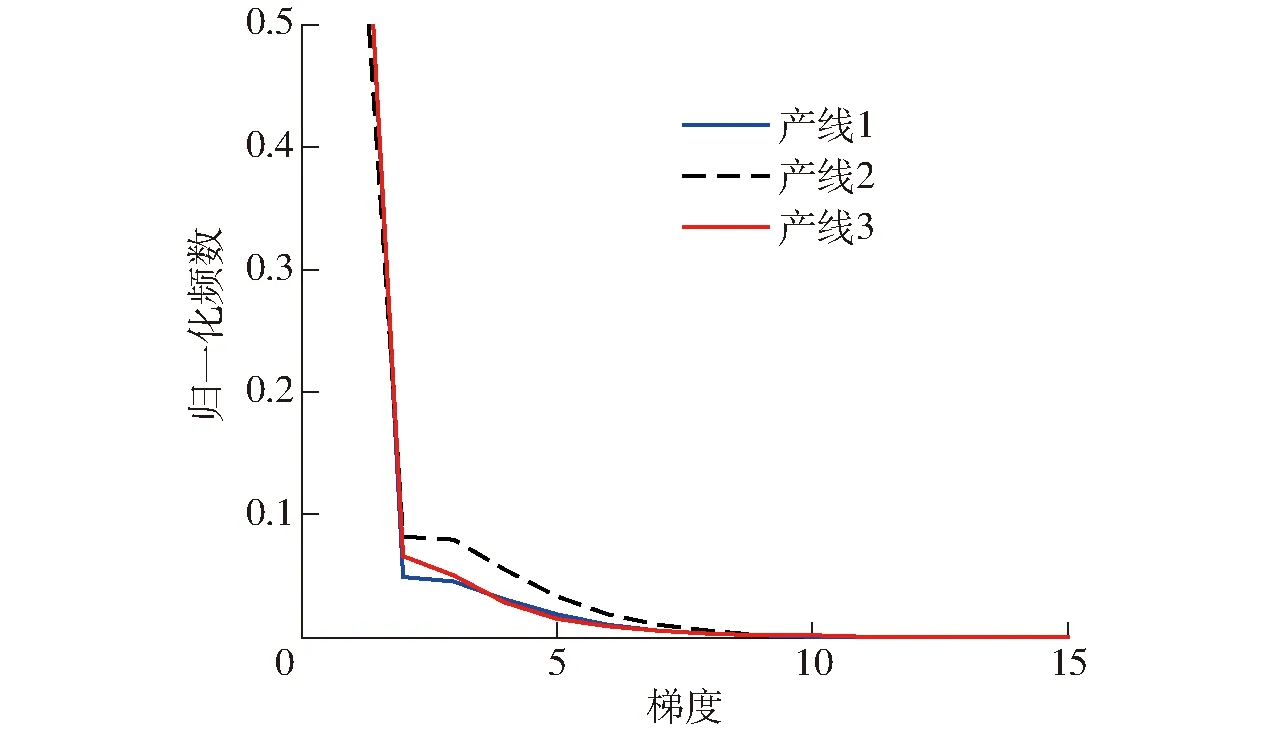
圖8 歸一化梯度曲線Fig.8 Curves of normalized gradient
2.2 目標測速算法實驗與分析
目標測速算法將分為滾筒實驗臺實驗和產(chǎn)線實際運行實驗兩部分。滾筒實驗臺可定量驗證測速算法的可行性,實驗裝置如圖9所示。架設在架子上的相機使用50 mm焦距鏡頭垂直拍攝貼于滾筒上的測試靶紙;滾筒由變頻器控制的交流電動機帶動轉(zhuǎn)動,其轉(zhuǎn)速可以通過旋轉(zhuǎn)編碼器讀出。滾筒周長多次測量取平均值為833.2 mm,測量相機物距為717 mm,依據(jù)光路計算得式(5)中光學放大率M為14.34。實驗中典型校正效果如圖10所示。

圖9 滾筒實驗平臺Fig.9 Roller experiment platform1.相機 2.電動機 3.滾筒 4.測試靶紙 5.旋轉(zhuǎn)編碼器 6.變頻器
圖10中樓房窗戶處的細節(jié)可以看出在正確校正后,圖像中色散現(xiàn)象基本消除。實驗結(jié)果如表 1所示,并通過相機測速均值Vcam與編碼器測速均值Vrot之差除以編碼器測速均值Vrot計算誤差。
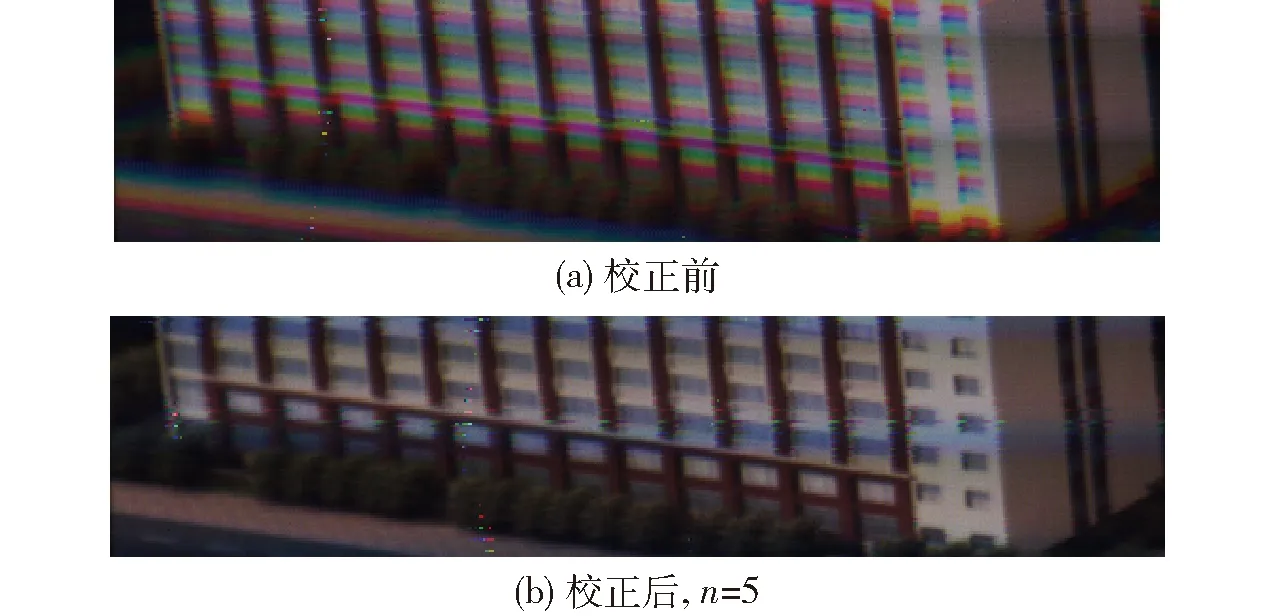
圖10 三線分離圖像與校正效果圖Fig.10 Diagram of triple-line separation image and correction effect

實驗序號變頻器頻率finv/Hz三線分離量相機測速均值Vcam/(m·s-1)編碼器測速均值Vrot/(m·s-1)誤差/%第1組164.891.641.67-1.0第2組203.792.122.081.7第3組253.142.562.502.3第4組312.603.093.18-2.9第5組392.004.024.02-0.2
測試結(jié)果顯示,三線測速方案基本能反映被拍攝物體真實的運行速度。將三線分離量測速方案在產(chǎn)線中使用,所得典型速度統(tǒng)計如圖11所示,此處以512個測速結(jié)果為例。其中96%的測量速度分布在8~15 m/s,均速為10.8 m/s,與工程經(jīng)驗相符。

圖11 異纖速度測試結(jié)果直方圖Fig.11 Histogram of foreign fiber velocity measurement result
2.3 目標檢測算法實驗與討論
圖12為合作廠房產(chǎn)線一個班次內(nèi)上傳白光通道檢出圖像。其中圖12a~12h為異纖,圖12i~12l為棉花本身所帶有的雜質(zhì)。

圖12 白光通道典型檢出物Fig.12 Typically detected substances of white light channel
紫外光和偏振光檢出效果如圖13所示,棉花在紫外光偏振光通道呈現(xiàn)較低灰度,通過固定閾值設定即可滿足檢出需求,本文在此不再贅述。

圖13 紫外光和偏振光檢出物Fig.13 Detected substances of fluorescence and polarization channel
圖14為高級用戶界面的設置界面,界面包括噴閥打擊時間、噴閥個數(shù)、絲狀異纖最小檢測長度、塊狀異纖最小檢測面積以及紫外光靈敏度。

圖14 高級用戶界面Fig.14 Advanced user interface
軟件主界面只保留給普通用戶靈敏度設定,用于成比例增加閾值選取的百分比數(shù)值,如圖15所示。設備開機后自動進入學習狀態(tài),在學習完畢后,進入檢測狀態(tài),并定時自動重學習閾值。

圖15 軟件主界面Fig.15 Main user interface
2.4 嵌入式硬件實驗與分析
嵌入式硬件實驗應分為2個步驟:①系統(tǒng)運行實時性實驗,通過使用模擬圖片檢測系統(tǒng)運行時間。②使用原始圖像數(shù)據(jù)長期實驗,用于檢驗板卡運行長期穩(wěn)定性。
驗證系統(tǒng)運行實時性,將選取的圖像在PC仿真平臺上使用VC仿真運行,并與使用測試設備中的圖像模擬源將數(shù)據(jù)發(fā)送至檢測板卡運行進行比對。運行時間分算法步驟如表2所示,其中PC平臺配置為i5-4210@2.4 GHz,8 GB DDR3,算法以Release方式編譯運行;嵌入式平臺為FPGA EP3C55和DM648@900 MHz,256 MB DDR2,其中DSP以“-O3”優(yōu)化設置編譯運行。
檢測板卡中FPGA完成梯度空間轉(zhuǎn)換和色差空間轉(zhuǎn)換等圖像預處理工作。其中梯度轉(zhuǎn)換需計算當前行與上一行和下一行數(shù)據(jù)的關系,需要緩存一行數(shù)據(jù),而色差空間轉(zhuǎn)換可在一行內(nèi)完成,不需要緩存數(shù)據(jù),所以FPGA總共耗時只有梯度空間轉(zhuǎn)換所需的緩存一行數(shù)據(jù)的時間,即表2中108 μs。DSP運算時,算法通過連通域大小初步確定疑似目標,然后對疑似目標進行測速,得到準確的目標尺寸,最后進行長寬比面積等精確細節(jié)檢測。DSP平臺試驗中,設計時將梯度和色差檢測利用DSP平臺提供的基于單指令多數(shù)據(jù)操作(Single instruction multiple data, SIMD)指令的相關內(nèi)聯(lián)函數(shù)(Intrinsic function)提升數(shù)據(jù)處理并行能力,并使用基于匯編優(yōu)化的數(shù)學庫對細節(jié)檢測的計算步驟加速,得到了較好的優(yōu)化效果,使DM648在主頻低于PC平臺的情況下得到了相當?shù)倪\算時間。實驗結(jié)果表明:嵌入式板卡處理一幀的圖像數(shù)據(jù)耗時為3 127 μs,該值小于共50行數(shù)據(jù)的一幀圖像所需的采集時間5 400 μs,板卡數(shù)據(jù)處理能力滿足系統(tǒng)實時性需求。
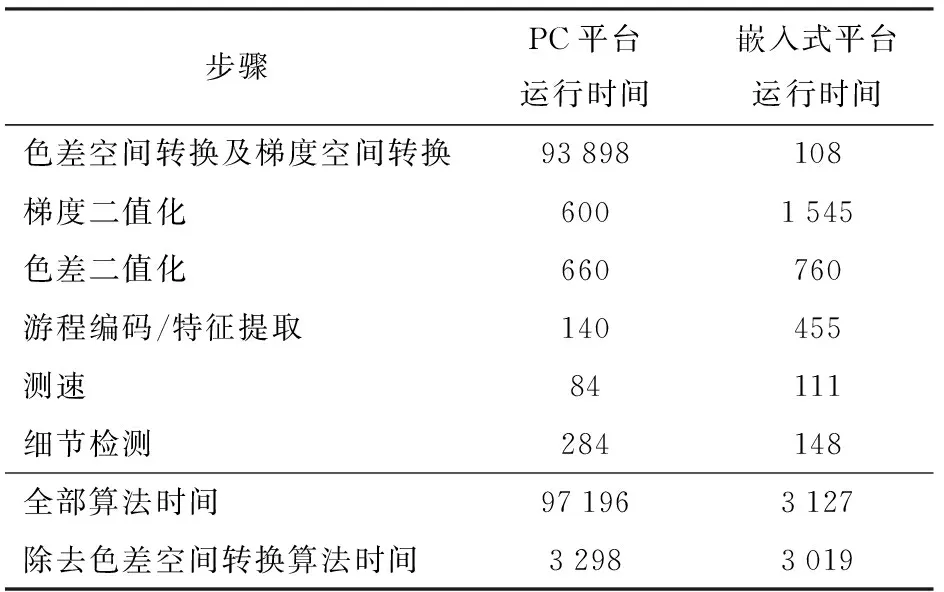
表2 算法分步測試結(jié)果Tab.2 Test results of algorithm step by step μs
不同于基于上位機的系統(tǒng)開發(fā),嵌入式方案在開發(fā)中需要將算法程序跨語言跨平臺進行移植并深度優(yōu)化,在工程實現(xiàn)中易造成嵌入式板卡算法程序運行結(jié)果和原算法結(jié)果不一致的問題。在系統(tǒng)測試中,應以相機專用測試設備錄制現(xiàn)場數(shù)據(jù)后,通過相機數(shù)據(jù)模擬源將所錄制的原始數(shù)據(jù)以相機接口格式輸送至嵌入式板卡,并對檢測數(shù)據(jù)進行長期驗證,文獻[20]中有具體測試設備實現(xiàn)方法的討論。在使用模擬源進行的長期測試中,F(xiàn)PGA+DSP板卡始終穩(wěn)定可靠,實驗中檢測效果與原算法保持一致,并且無運行超時記錄。
2.5 剔除系統(tǒng)實驗與分析
剔除系統(tǒng)實驗時,需測試系統(tǒng)對不同速度目標的剔除效果。實驗時使用變頻風機連接異纖機主管道,并通過設定不同頻率的方式,改變管道風速,通過測試系統(tǒng)對異物的擊出率,測試系統(tǒng)對產(chǎn)線風速變化的適應能力。實驗中使用80 mm×5 mm的彩色皺紋紙,噴閥時長設定為13 ms。實驗時待風機工作穩(wěn)定后,投放20朵粘上測試紙條的棉團進行測試,實驗結(jié)果如表3所示。
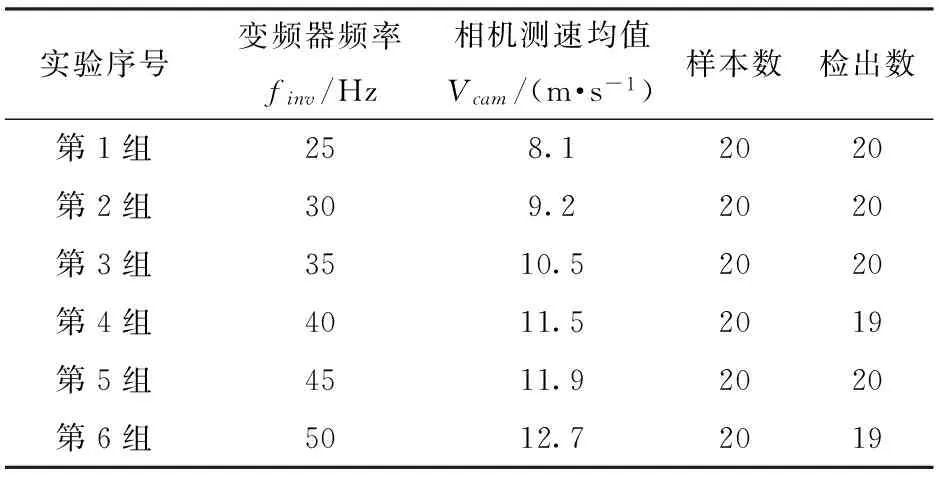
表3 變速剔除實驗結(jié)果Tab.3 Test results of variable speed detection
上述實驗結(jié)果顯示,因為異纖附著在棉花上,速度和棉速一致,通過準確的目標測速,系統(tǒng)檢出效果良好。
2.6 異纖檢測實驗與分析
安裝于實際產(chǎn)線的設備如圖16所示。在現(xiàn)場設計樣本測試及現(xiàn)場扎袋比對測試2種方案對設備異纖檢測能力進行測試。表4為設備運行狀態(tài)時使用樣本測試的典型檢測報告。產(chǎn)線測試條件為:支別J40,產(chǎn)量348 kg/h,測試棉速均值為10.8 m/s。投放時需保證投放口接近相機檢測區(qū)域,以避免測試樣本被棉流覆蓋。開閥時長設置為白光20 ms,紫外光、偏振光50 ms,在異纖清除機管道投放口投放40 mm×2 mm的模擬異纖樣本,進行測試。

圖16 實際產(chǎn)線安裝照片F(xiàn)ig.16 Installation photo of machine in cotton mill1.除雜氣路 2.異纖清除機 3.混棉機 4.精細開棉機
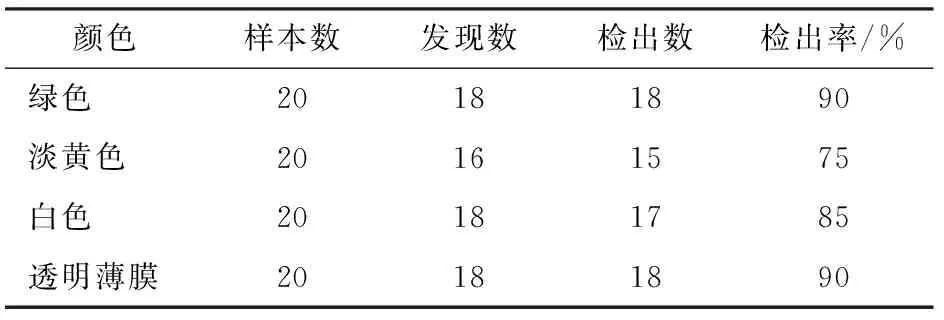
顏色樣本數(shù)發(fā)現(xiàn)數(shù)檢出數(shù)檢出率/%綠色20181890淡黃色20161575白色20181785透明薄膜20181890
注:檢出率為檢出數(shù)目與樣本數(shù)目的比值。
實驗中淡黃色異纖檢出率較低,與其和棉花色彩差異較小有關。檢測時各組擊出率相較之前變速擊出實驗有少量下降,與輸棉管道風壓和剔除系統(tǒng)除雜風機風壓匹配有關。
異纖清除機在合作棉紡廠測試運行期間,由合作廠商獨自通過扎袋比對方式對設備進行異纖檢出測試,測試條件為:支別J50,產(chǎn)線產(chǎn)量390 kg/h,測試時間56 min。測試時,國外異纖清除機A和本文異纖清除機處于一線兩機并行的工作狀態(tài),國外異纖清除機B安裝于本文異纖清除機后方,用于檢測本文異纖清除機漏過的異纖。測試完畢后對總噴出物稱量(出花量)和異纖稱量,然后將兩者相除得到異纖出花比。測試結(jié)果表明:本文異纖清除機出花量為212.4 g,異纖質(zhì)量為0.4 g,異纖出花比為0.189%;國外異纖清除機A的出花量為466.4 g,異纖質(zhì)量為0.3 g,異纖出花比為0.064%;國外異纖清除機B的出花量為344.4 g,異纖質(zhì)量為0.09 g,異纖出花比為0.026%。本文異纖清除機在檢出異纖質(zhì)量和異纖出花比2個參數(shù)上都有優(yōu)勢,原因是準確的異纖檢測算法和噴閥控制。
異纖清除機在如圖16所示的合作棉紡廠已運行超過2年,整體檢測效果一直保持穩(wěn)定,合作廠方認可本設計中異纖清除機的檢測效果和對異纖種類的覆蓋率。
3 結(jié)論
(1)針對透明薄膜在傳統(tǒng)紫外光和白光檢測中難以發(fā)現(xiàn)的問題,在紫外光路上通過增加偏振光源,在不增加相機的情況下,增強對透明薄膜的檢出。
(2)針對異纖檢測算法討論對產(chǎn)線適應性問題研究較少的現(xiàn)狀,提出基于歸一化相關系數(shù)和二次曲面擬合的三線陣相機的亞像素空間分離量估算的測速方案,設計滾筒實驗進行驗證。最終將測速應用于剔除系統(tǒng)控制方案,并設計變速實驗進行驗證。
(3)基于FPGA+DSP嵌入式系統(tǒng),設計一套計算量合適,利于嵌入式實現(xiàn)的,包括白光、紫外光及偏振光檢測在內(nèi)的算法。在嵌入式系統(tǒng)中實現(xiàn)算法,并優(yōu)化運行速率至滿足系統(tǒng)實時性需求。
(4)設計樣本測試及現(xiàn)場扎袋比對測試2種方案來驗證現(xiàn)場檢測效果。樣本測試顯示設備在與棉花有明顯差異的異纖及帶有熒光粉的丙綸絲和透明薄膜的檢出率高于80%,而接近棉花顏色的淡黃色異纖檢出率稍低于80%。扎袋比對測試顯示,基于準確的異纖檢測算法和噴閥控制,本文設備相較同類設備有異纖落花率優(yōu)勢。
1 楊文柱,李道亮,魏新華,等. 基于光譜分析的棉花異性纖維最佳波段選擇方法[J]. 農(nóng)業(yè)工程學報, 2009, 25(10):186-192. YANG Wenzhu, LI Daoliang, WEI Xinhua, et al. Selection of optimal band for detection foreign fibers in lint cotton using spectroscopic analysis[J]. Transactions of the CSAE, 2009,25(10):186-192 (in Chinese)
2 王欣. 基于機器視覺的棉花偽異性纖維識別研究[D]. 北京:中國農(nóng)業(yè)大學, 2015 WANG Xin. Detection of pseudo-foreign fibers based on computer vision[D]. Beijing: China Agricultural University, 2015.(in Chinese)
3 楊文柱,李道亮,魏新華,等. 棉花異性纖維圖像分割方法[J].農(nóng)業(yè)機械學報,2009,40(3):156-160. YANG Wenzhu, LI Daoliang, WEI Xinhua, et al. Toward image segmentation of foreign fibers in lint[J].Transactions of the Chinese Society for Agricultural Machinery,2009,40(3):156-160. (in Chinese)
4 楊文柱,李道亮,魏新華,等. 基于自動視覺檢測的棉花異性纖維分類系統(tǒng)[J].農(nóng)業(yè)機械學報,2009,40(12):177-181. YANG Wenzhu, LI Daoliang, WEI Xinhua, et al. AVI system for classification of foreign fibers in cotton[J]. Transactions of the Chinese Society for Agricultural Machinery,2009,40(12):177-181. (in Chinese)
5 趙學華,李道亮,楊文柱,等. 基于改進蟻群算法的棉花異性纖維目標特征選擇方法[J].農(nóng)業(yè)機械學報,2011,42(4):168-173. ZHAO Xuehua, LI Daoliang, YANG Wenzhu, et al. Feature selection for cotton foreign fiber objects based on improved ant colony algorithm[J].Transactions of the Chinese Society for Agricultural Machinery,2011,42(4):168-173. (in Chinese)
6 趙學華, 李道亮, 于合龍. 基于費舍爾評分與離散粒子群優(yōu)化的棉花異性纖維在線檢測[J].農(nóng)業(yè)工程學報, 2014, 30(6):107-115. ZHAO Xuehua, LI Daoliang, YU Helong. Online detection for cotton foreign fiber based on fisher score and binary particle swarm optimization[J]. Transactions of the CSAE,2014,30(6):107-115. (in Chinese)
7 王欣,李道亮,楊文柱,等.基于可見光機器視覺的棉花偽異性纖維識別方法[J/OL].農(nóng)業(yè)機械學報,2015,46(8):7-14. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20150802&journal_id=jcsam.DOI: 10.6041/j.issn.1000-1298.2015.08.002. WANG Xin, LI Daoliang, YANG Wenzhu, et al. Lint cotton pseudo-foreign fiber detection based on visible spectrum computer vision[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(8):7-14.(in Chinese)
8 鄭文秀,王金星,劉雙喜,等.棉花異性纖維的動態(tài)識別技術研究[J].儀器儀表學報,2009,30(10):2203-2207. ZHENG Wenxiu, WANG Jingxing, LIU Shuangxi, et al. Reaserch on dynamic identification technology of cotton foreign fibers[J]. Chinese Journal of Scientific Instrument,2009,30(10):2203-2207. (in Chinese)
9 RAMESH B, BHARDWAJ A, JUSTIN R. Optimization and evaluation of image- and signal- processing kernels on the TI C6678 multi-core DSP[C]∥IEEE High Performance Extreme Computing Conference (HPEC),2014:1-6.
10 PAUWELS K, TOMASI M, JAVIER D, et al. A comparison of FPGA and GPU for real-time phase-based optical flow, stereo, and local image features[J]. IEEE Transactions on Computers,2012,61(7):999-1012.
11 LEE S H, YANG C S. A real time object recognition and counting system for smart industrial camera sensor[J]. IEEE Sensors Journal,2017,17(8):2516-2523.
12 BARBALACE A, LUCHETTA A, MANDUCHI G, et. al. Performance comparison of VxWorks, Linux, RTAI, and Xenomai in a hard real-time application[J]. IEEE Transactions on Nuclear Science,2008,55(1): 435-439.
13 陳銘明. 基于FPGA與DSP的棉花異纖檢測系統(tǒng)研究[D]. 南京:南京理工大學, 2015. CHEN Mingming. Research on cotton foreign fiber detection system based on FPGA and DSP[D]. Nanjing: Nanjing University of Science & Technology,2015. (in Chinese)
14 鄧繼忠,李山,張建瓴,等.小型農(nóng)產(chǎn)品分選機設計與試驗[J/OL].農(nóng)業(yè)機械學報,2015,46(9):245-250. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20150936&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2015.09.036. DENG Jizhong, LI Shan, ZHANG Jianling, et al. Design and test of small-scale sorting machine for agricultural products[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2015,46(9):245-250. (in Chinese)
15 張晨, 孫世磊, 石文軒,等. 工業(yè)線陣CCD相機系統(tǒng)測試與噪聲評估[J].光學精密工程,2016,24(10):2532-2539. ZHANG Chen, SUN Shilei, SHI Wenxuan, et al. Linear CCD camera system for industry measurement and its noise evaluation[J].Optics and Precision Engineering,2016,24(10):2532-2539. (in Chinese)
16 賈小秋. 超越M型異纖分揀機的應用[J]. 棉紡織技術,2016,44(8):48-51. JIA Xiaoqiu. Application of Chaoyue M foreign fiber cleaner [J]. Cotton Textile Technology,2016,44(8):48-51. (in Chinese)
17 陸文凱,張雷,劉磊.異性纖維分揀系統(tǒng)中用視頻測速的棉流速度在線估計方法:中國,10065192.4[P]. 2008-10-08.
18 李曉帆. 線陣CCD信號處理系統(tǒng)及處理算法研究[D]. 南京:南京理工大學, 2015. LI Xiaofan. Research on linear CCD signal processing system and algorithms[D]. Nanjing: Nanjing University of Science & Technology, 2015. (in Chinese)
19 潘兵,謝惠民,戴福隆.數(shù)字圖像相關中亞像素位移測量算法的研究[J].力學學報,2007,39(2):245-252. PAN Bing, XIE Huimin, DAI Fulong. An investigation of sub-pixel displacements registration algorithms in digital image correlation[J]. Chinese Journal of Theoretical Applied Mechanics,2007,39(2):245-252. (in Chinese)
20 夏巧橋,汪鼎文,張立國,等.高速多通道遙感相機快視系統(tǒng)的實現(xiàn)[J].光學精密工程,2013,21(1):158-166. XIA Qiaoqiao, WANG Dingwen, ZHANG Liguo, et al. Realization of fast-view system for high-speed multi-channel remote sensing camera [J]. Optics and Precision Engineering, 2013,21(1):158-166. (in Chinese)
Design and Test of Foreign Fiber Removal Machine Based on Embedded System
ZHANG Chen1SUN Shilei2SHI Wenxuan3ZENG Lin1DENG Dexiang1
(1.SchoolofElectronicInformation,WuhanUniversity,Wuhan430072,China2.InternationalSchoolofSoftware,WuhanUniversity,Wuhan430072,China3.SchoolofRemoteSensingandInformationEngineering,WuhanUniversity,Wuhan430072,China)
The embedded system based on FPGA+DSP was suitable for the agricultural sorting field, due to its flexible chip selection and high power efficiency. The embedded system was designed based on the principle of detection, software and hardware design and rejection system design. In principle of detection, a polarization channel was added to the UV channel to resolve the problem of transparent film detection without increasing camera. In software design, a speed measurement based on spatial correction and a learning algorithm for threshold detection was proposed to improve the adaptation of the equipment. An embedded solution was put forward which had advantages in both material cost and power consumption. After optimization, the DSP embedded board could stably process camera image data in real time. In rejection system, a control scheme was designed based on target real-time speed. The experiment result showed that the speed measurement scheme was verified via roller platform, and cotton speed can be obtained in the production line test. The embedded system could meet the real-time requirement, and the system was stable under varying foreign fiber numbers in long-term test. Concerning the test of rejection system, an impact test was performed by changing the wind speed. Finally, two typical foreign fiber detection tests of the system were implemented. The results showed that the detection rates of foreign fibers and polypropylene filaments as well as transparent films were higher than 80%, while the detection rate of yellowish foreign fibers was slightly lower than 80%. In the comparison test with similar equipment, the present equipment revealed superior detection rate. Long-term test result showed that the present equipment was easy to operate and had stable performance.
foreign fiber removal machine; foreign fiber of cotton; machine vision; embedded system; sub-pixel spatial separation correction
10.6041/j.issn.1000-1298.2017.08.004
2017-03-02
2017-06-05
國家自然科學基金青年科學基金項目 (61501334)
張晨(1983—),男,博士生,主要從事機器視覺和嵌入式系統(tǒng)研究,E-mail: chen.zhang@whu.edu.cn
孫世磊(1981—),男,副教授,主要從事機器視覺和嵌入式系統(tǒng)研究,E-mail: sunsl@whu.edu.cn
S24; TS112.7
A
1000-1298(2017)08-0043-10
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
鐵道通信信號(2018年2期)2018-04-18 12:18:23
家庭影院技術(2017年9期)2017-09-26 03:41:45
電鍍與環(huán)保(2016年3期)2017-01-20 08:15:32
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
