自裝卸式垃圾車(chē)?yán)瓧U式提升機(jī)構(gòu)的理論分析
2017-09-03 09:58:19簡(jiǎn)溪金
專(zhuān)用汽車(chē) 2017年8期
簡(jiǎn)溪金
JIAN Xi-jin
福建龍馬環(huán)衛(wèi)裝備股份有限公司 福建龍巖 364028
自裝卸式垃圾車(chē)?yán)瓧U式提升機(jī)構(gòu)的理論分析
簡(jiǎn)溪金
JIAN Xi-jin
福建龍馬環(huán)衛(wèi)裝備股份有限公司 福建龍巖 364028
為了更加深入掌握自裝卸式垃圾車(chē)?yán)瓧U式提升機(jī)構(gòu)的設(shè)計(jì)原理及優(yōu)化方法,介紹了拉桿式提升機(jī)構(gòu)的結(jié)構(gòu)組成和工作原理,并對(duì)拉桿式提升機(jī)構(gòu)進(jìn)行了結(jié)構(gòu)分析、運(yùn)動(dòng)分析和受力分析,為今后設(shè)計(jì)系列拉桿式提升機(jī)構(gòu)提供了參考依據(jù),也對(duì)后續(xù)性能研究具有很好的指導(dǎo)意義。
自裝卸式垃圾車(chē) 矢量方程 直接求導(dǎo)法 力矩平衡
1 前言
隨著社會(huì)的進(jìn)步,人民生活水平的提高,城市生活垃圾的數(shù)量劇增,城市垃圾的收運(yùn)問(wèn)題愈發(fā)顯得突出。自裝卸式垃圾車(chē)作為一種與垃圾壓縮中轉(zhuǎn)站配套使用的環(huán)衛(wèi)專(zhuān)用車(chē)輛,主要用于環(huán)衛(wèi)部門(mén)對(duì)城市桶裝生活垃圾進(jìn)行收集,具有裝卸垃圾自動(dòng)化、運(yùn)輸垃圾密封化等特點(diǎn)。相信隨著城市化進(jìn)程的加快,自裝卸式垃圾車(chē)將會(huì)得到更為廣泛的應(yīng)用。
作為自裝卸式垃圾車(chē)的一個(gè)關(guān)鍵裝置,拉桿式提升機(jī)構(gòu)直接關(guān)系到整車(chē)的使用性能及裝載效率,因此其設(shè)計(jì)的合理性至關(guān)重要。設(shè)計(jì)時(shí),必須對(duì)該機(jī)構(gòu)的運(yùn)動(dòng)過(guò)程及受力情況進(jìn)行充分地分析,才能使機(jī)構(gòu)的設(shè)計(jì)合理可靠。
2 拉桿式提升機(jī)構(gòu)的結(jié)構(gòu)組成及工作原理[1]
拉桿式提升機(jī)構(gòu)的結(jié)構(gòu)如圖1所示。提升機(jī)構(gòu)主要由液壓油缸、提升臂、拉桿、提升架、翻轉(zhuǎn)架、搖桿、滾輪及主導(dǎo)軌等部件組成。
提升臂分別與箱體、液壓油缸(活塞桿端)、拉桿通過(guò)鉸鏈點(diǎn)連接;液壓油缸另一端鉸接在箱體上;拉桿另一端與提升架鉸接;提升架通過(guò)兩側(cè)4個(gè)滾輪沿翻轉(zhuǎn)架副導(dǎo)軌運(yùn)動(dòng);翻轉(zhuǎn)架與搖桿通過(guò)鉸接組合成聯(lián)動(dòng)副,再由翻轉(zhuǎn)架與搖桿兩側(cè)各兩個(gè)滾輪沿焊于箱體上的主導(dǎo)軌運(yùn)動(dòng)。
提升機(jī)構(gòu)的工作原理如下:液壓系統(tǒng)通過(guò)液壓泵提供動(dòng)力推動(dòng)雙作用液壓油缸的活塞桿伸出,提升臂在活塞桿的推力作用下繞其與箱體的鉸鏈點(diǎn)擺動(dòng),提升臂帶動(dòng)拉桿向上運(yùn)動(dòng),進(jìn)而帶動(dòng)掛有垃圾桶的提升架沿翻轉(zhuǎn)架副導(dǎo)軌向上移動(dòng),直到垃圾桶抵住翻轉(zhuǎn)架上的壓板后,帶動(dòng)翻轉(zhuǎn)架沿主導(dǎo)軌一起向上移動(dòng)。
當(dāng)翻轉(zhuǎn)架上端滾輪移動(dòng)到主導(dǎo)軌頂端曲線軌道末端時(shí),上端滾輪被擋住停止,同時(shí)拉桿繼續(xù)將提升架拉起,使翻轉(zhuǎn)架以上端滾輪軸心線為翻轉(zhuǎn)軸翻轉(zhuǎn)垃圾桶,直到完成桶內(nèi)垃圾自動(dòng)傾卸。
清空垃圾后,通過(guò)雙作用液壓油缸反向進(jìn)油,活塞桿開(kāi)始回縮,提升臂反方向擺動(dòng),使垃圾桶退回到初始位置,完成一次自動(dòng)填裝垃圾的工作過(guò)程。
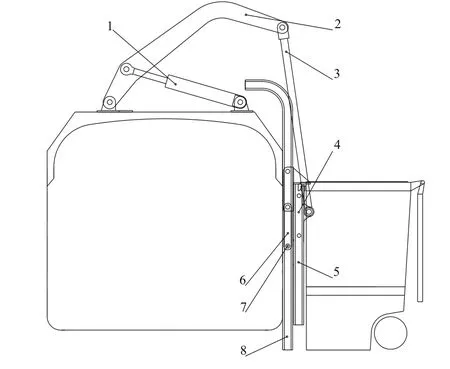
圖1 拉桿式提升機(jī)構(gòu)的結(jié)構(gòu)簡(jiǎn)圖
3 拉桿式提升機(jī)構(gòu)結(jié)構(gòu)分析
要使機(jī)構(gòu)實(shí)現(xiàn)預(yù)期的確定運(yùn)動(dòng),自由度數(shù)F必須滿足下列要求:a. F>0;b. F的數(shù)量等于原動(dòng)件的數(shù)量[2]。
3.1 工況1
圖2所示為拉桿式提升機(jī)構(gòu)簡(jiǎn)圖a,圖中O、A、B、C、D、E、H、K分別為鉸鏈的回轉(zhuǎn)中心,1、2、3、4視作機(jī)構(gòu)中的連桿(注:如圖1所示,當(dāng)垃圾桶被提升至抵住翻轉(zhuǎn)架上的壓板后相對(duì)翻轉(zhuǎn)架靜止,圖2中的DEF可視為一個(gè)單一構(gòu)件3),5為液壓缸活塞桿,6為液壓缸缸筒,其自由度數(shù)Fa:

式中,n為活動(dòng)構(gòu)件數(shù)目;P1為低副數(shù)目;Ph為高副數(shù)目。

圖2 拉桿式提升機(jī)構(gòu)簡(jiǎn)圖a

圖3 拉桿式提升機(jī)構(gòu)簡(jiǎn)圖b
由于機(jī)構(gòu)中僅件5作為原動(dòng)件,因此機(jī)構(gòu)的運(yùn)動(dòng)并不確定,這與實(shí)際情況不符,其實(shí)在實(shí)際工況下,當(dāng)點(diǎn)H和點(diǎn)K兩處滾輪運(yùn)動(dòng)自如時(shí),提升架在豎直上提的過(guò)程中并不會(huì)繞點(diǎn)H旋轉(zhuǎn),只會(huì)隨著翻轉(zhuǎn)架沿主導(dǎo)軌豎直上移,因此在進(jìn)入主導(dǎo)軌頂端曲線軌道之前的過(guò)程中需將件3及件4視為單一構(gòu)件3′,機(jī)構(gòu)簡(jiǎn)圖如圖3所示。此時(shí)其自由度數(shù)Fb:

Fb等于主動(dòng)件數(shù)目。
3.2 工況2
當(dāng)翻轉(zhuǎn)架上端滾輪移動(dòng)到主導(dǎo)軌頂端曲線軌道末端后,繞上端滾輪軸心線翻轉(zhuǎn)垃圾桶時(shí),件4及其所附帶的運(yùn)動(dòng)副并沒(méi)有對(duì)機(jī)構(gòu)運(yùn)動(dòng)起到實(shí)際的限制作用,故為虛約束,因此在機(jī)構(gòu)運(yùn)動(dòng)分析中可忽略(圖4中用虛線表示),機(jī)構(gòu)簡(jiǎn)圖如圖4所示。
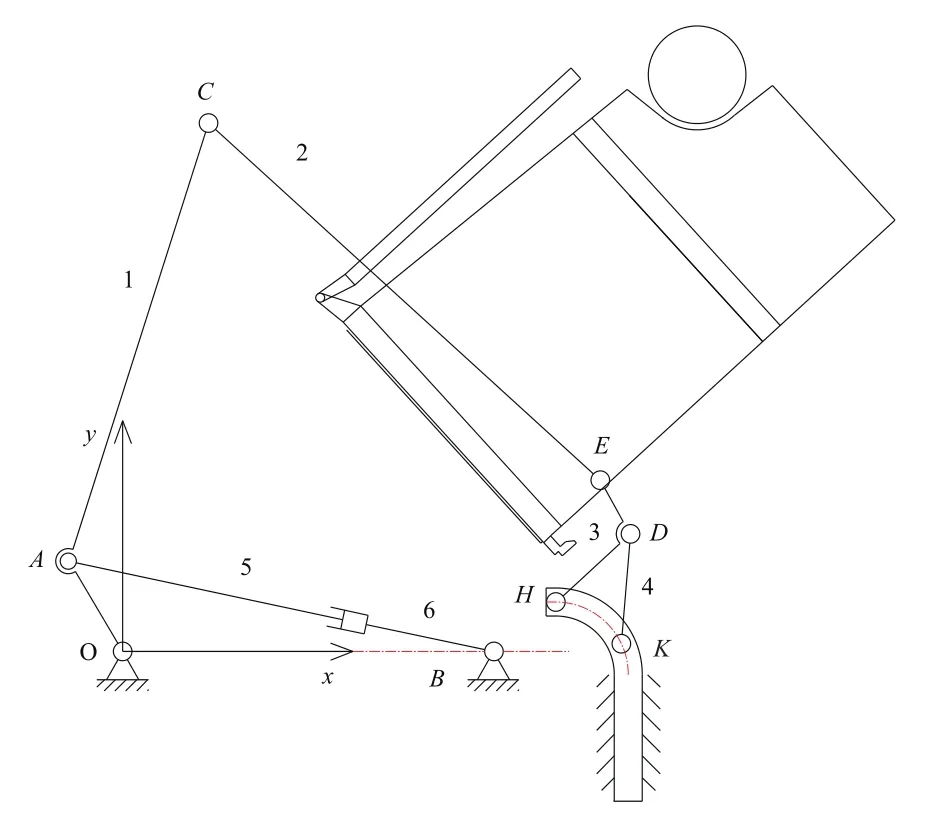
圖4 拉桿式提升機(jī)構(gòu)簡(jiǎn)圖c
這時(shí)其自由度數(shù) Fc=3n-2Pl-Ph=3×5-2×7=1,亦等于主動(dòng)件數(shù)目。此時(shí),機(jī)構(gòu)只需操縱雙作用液壓缸,即可完成預(yù)定的動(dòng)作。
由上述分析可知,采用雙作用液壓缸驅(qū)動(dòng),可實(shí)現(xiàn)反向自鎖,使機(jī)構(gòu)在運(yùn)送垃圾桶的過(guò)程中不會(huì)由于自重自行下落而造成人員意外傷害。
4 拉桿式提升機(jī)構(gòu)運(yùn)動(dòng)分析
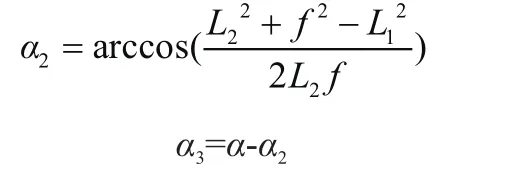
運(yùn)用解析法分析翻轉(zhuǎn)架沿主導(dǎo)軌上升時(shí)的速度及加速度和當(dāng)翻轉(zhuǎn)架上端滾輪移動(dòng)到主導(dǎo)軌頂端曲線軌道末端后,垃圾桶繞上端滾輪軸心翻轉(zhuǎn)時(shí)的角速度及角加速度。翻轉(zhuǎn)架沿主導(dǎo)軌上升時(shí)的模型如圖5所示,翻轉(zhuǎn)架上端滾輪移動(dòng)到主導(dǎo)軌軌道末端模型如圖6所示。

圖5 翻轉(zhuǎn)架沿主導(dǎo)軌上升時(shí)模型
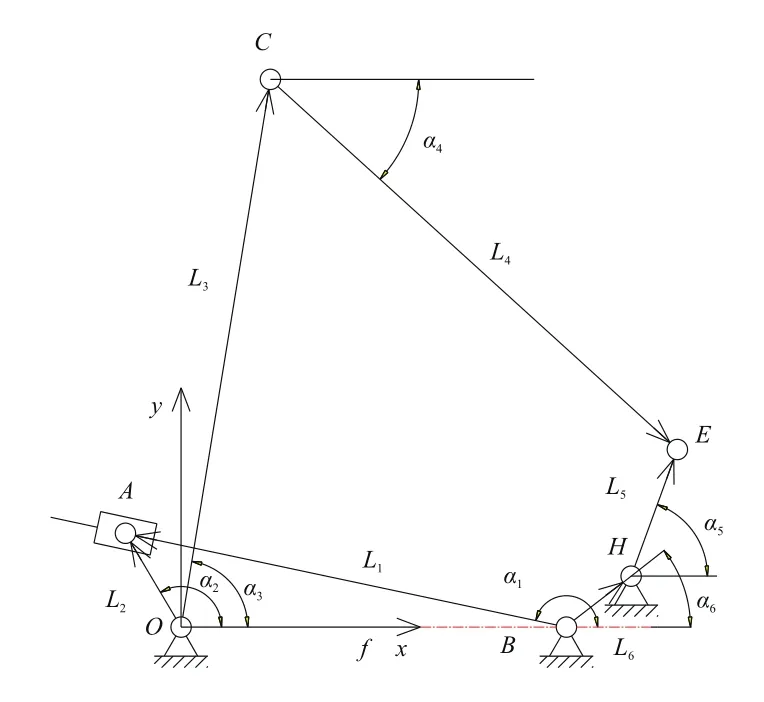
圖6 翻轉(zhuǎn)架上端滾輪移動(dòng)到主導(dǎo)軌軌道末端模型
由圖5可得封閉矢量環(huán)方程如下,各矢量與x軸的夾角以逆時(shí)針?lè)较驗(yàn)檎较颍?/p>
方程中各矢量向x軸、y軸投影,得如下位置方程:

上述位置方程中L2、L3、L4、e由結(jié)構(gòu)確定,各角度又有如下關(guān)系式:
由三角形余弦定理得:
式中,α為OA與OC夾角,已由提升臂結(jié)構(gòu)確定;f為基座OB兩點(diǎn)間距離。

解上述位置方程可求出位移s。

對(duì)s求導(dǎo)數(shù)可求出速度與加速度。
由上圖6得封閉矢量環(huán)方程如下,各矢量與x軸的夾角以逆時(shí)針?lè)较驗(yàn)檎?/p>
方程中各矢量向x軸、y軸投影,得如下位置方程:

上述位置方程中L2、L3、 L4、 L5、 L6、α6由結(jié)構(gòu)確定,另由圖6得:

式中,L1為油缸行程變化后的油缸總長(zhǎng)度;L2為提升臂OA兩點(diǎn)間的長(zhǎng)度;L3為提升臂OC兩點(diǎn)間的長(zhǎng)度;L4為拉桿長(zhǎng)度;L5為翻轉(zhuǎn)架EF兩點(diǎn)間的長(zhǎng)度;L6為油缸座固定點(diǎn)B與主導(dǎo)軌頂端曲線軌道末端滾輪中心F兩點(diǎn)間距離; e為油缸座固定點(diǎn)B與主導(dǎo)軌水平方向的距離;f為提升臂固定點(diǎn)O與油缸座固定點(diǎn)B兩點(diǎn)間的距離;s為翻轉(zhuǎn)架沿主導(dǎo)軌垂直上升的距離;α1為L(zhǎng)1與x軸正方向的夾角;α2為 L2與x軸正方向的夾角;α3為L(zhǎng)3與x軸正方向的夾角;α4為L(zhǎng)4與x軸正方向的夾角;α5為L(zhǎng)5與x軸正方向的夾角;α6為L(zhǎng)6與x軸正方向的夾角。
聯(lián)立兩方程求解,可將α4和α5分別用α3的代數(shù)式表示,此工況下α3=α2-α。
代入后可求出角位移α5,對(duì)α5求導(dǎo)數(shù)可求出角速度與角加速度。
5 拉桿式提升機(jī)構(gòu)受力分析
根據(jù)拉桿式工作過(guò)程,可以將提升機(jī)構(gòu)分為三個(gè)臨界運(yùn)動(dòng)狀態(tài)。一是垃圾桶即將被提起的狀態(tài);二是垃圾桶被提到主導(dǎo)軌末端開(kāi)始傾倒垃圾的瞬時(shí)狀態(tài);三是垃圾桶傾倒完垃圾后的狀態(tài)。
5.1 垃圾桶即將被提起狀態(tài)
圖7為垃圾桶即將被提起狀態(tài)時(shí)的提升機(jī)構(gòu)受力關(guān)系圖,此時(shí)垃圾桶處于將被提起的狀態(tài),在該狀態(tài)下各構(gòu)件的受力情況如下。
5.1.1 垃圾桶受力

聯(lián)立兩方程解得:

式中,F(xiàn)1g為拉桿對(duì)垃圾桶作用的力;Fdg為主導(dǎo)軌對(duì)垃圾桶作用的力;β1為拉桿與水平線之間的夾角;β2為Fdg方向與水平線之間的夾角;b為拉桿與提升架之間的鉸接點(diǎn)到坐標(biāo)y軸反向延長(zhǎng)線的水平距離;此時(shí)α3=α-α2。

圖7 垃圾桶即將被提起狀態(tài)時(shí)的提升機(jī)構(gòu)受力關(guān)系圖
5.1.2 鉸接點(diǎn)C的受力
當(dāng)不考慮拉桿自重時(shí),拉桿l4是二力桿,F(xiàn)lg與 Flg'受力大小相等,故鉸接點(diǎn)C的受力大小為:

5.1.3 鉸接點(diǎn)A的受力
對(duì)O點(diǎn)取矩,提升機(jī)構(gòu)對(duì)B點(diǎn)的作用力為P1,由力矩平衡得:
由圖7得式中:

代入可得:

5.2 垃圾桶被提到主導(dǎo)軌末端開(kāi)始傾倒垃圾的瞬時(shí)狀態(tài)圖8為垃圾桶被提到主導(dǎo)軌末端開(kāi)始傾倒垃圾狀態(tài)提升機(jī)構(gòu)受力關(guān)系圖,在此狀態(tài)下圖2中的DF連線與垃圾桶仍保持平行,在該狀態(tài)下各構(gòu)件的受力為:

5.2.1 垃圾桶受力式中,l為垃圾桶的寬度;l4為拉桿的長(zhǎng)度;l7為上滾輪中心H到拉桿與垃圾桶的鉸接點(diǎn)E的距離;l8為垃圾桶質(zhì)心到平行于垃圾桶上邊沿且經(jīng)過(guò)上滾輪中心H的直線的距離;l10為上滾輪中心H到垃圾桶左邊沿的距離;β3為l4與l7之間的夾角;β4為上滾輪中心與鉸接點(diǎn)D的連線與豎直y軸之間的夾角,l為上滾輪中 心F與鉸接點(diǎn)D連線之間的距離;
9l11為鉸接點(diǎn)D到經(jīng)過(guò)上滾輪中心H的水平線的豎直距離。
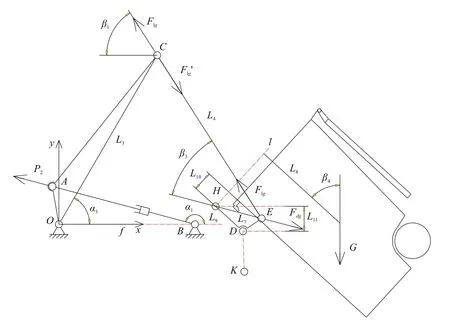
圖8 垃圾桶在主導(dǎo)軌末端開(kāi)始傾倒垃圾狀態(tài)提升機(jī)構(gòu)受力關(guān)系圖
5.2.2 鉸接點(diǎn)C的受力
當(dāng)不考慮拉桿自重時(shí),拉桿l4是二力桿,F(xiàn)lg與 Flg'受力大小相等,故鉸接點(diǎn)C的受力大小為:

5.2.3 鉸接點(diǎn)A的受力
對(duì)O點(diǎn)取力矩,提升機(jī)構(gòu)對(duì)B點(diǎn)的作用力為P2,由力矩平衡得:

由圖8得知:
代入可得:
5.3 垃圾桶傾倒完垃圾狀態(tài)提升機(jī)構(gòu)受力分析
圖8所示為垃圾桶傾倒完垃圾狀態(tài)提升機(jī)構(gòu)受力關(guān)系圖,兩滾輪中心連線與豎直y軸之間的夾角較圖8不變,在該狀態(tài)下各構(gòu)件的受力為:
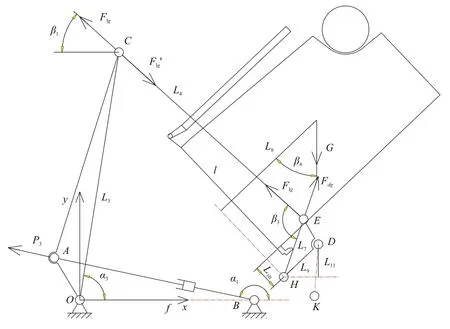
圖9 垃圾桶傾倒完垃圾狀態(tài)提升機(jī)構(gòu)受力關(guān)系圖
5.3.1 垃圾桶受力

式中,β1為拉桿與水平線之間的夾角。
5.3.2 鉸接點(diǎn)C的受力
當(dāng)不考慮拉桿自重時(shí),拉桿l4是二力桿,F(xiàn)lg與Flg'受力大小相等,故鉸接點(diǎn)C的受力大小為:
5.3.3 鉸接點(diǎn)A的受力
對(duì)O點(diǎn)取力矩,提升機(jī)構(gòu)對(duì)B點(diǎn)的作用力為P3,由力矩平衡得:

由圖9得:

代入可得:
6 結(jié)語(yǔ)
通過(guò)以上一系列分析,可以得到設(shè)計(jì)和選擇液壓缸和主要結(jié)構(gòu)件強(qiáng)度校核的理論依據(jù),此分析方法對(duì)類(lèi)似平面多連桿機(jī)構(gòu)具有普遍適用性,為后續(xù)的機(jī)構(gòu)優(yōu)化研究奠定了基礎(chǔ)。
[1]徐達(dá),蔣崇賢.專(zhuān)用汽車(chē)結(jié)構(gòu)與設(shè)計(jì)[M].北京:北京理工大學(xué)出版社,1998.
[2]張春林.機(jī)械原理[M].北京:高等教育出版社,2006.
Theoretical Analysis of Pull-rod Lifting Mechanism of Self-loading Garbage Truck
In order to grasp the design principle and optimization method of the pull-rod lifting mechanism more deeply, the structure and working principle of the pull-rod lifting mechanism was introduced, and the structural analysis,the kinematic analysis and the force analysis separately to the pull-rod lifting mechanism were carried out, providing a reference for designing a series of the pull-rod lifting mechanisms and having a good guiding significance for the follow-up performance research.
self-loading garbage truck; vector equation; direct derivation method; moment balance
U469.6+91.02
A
1004-0226(2017)08-0102-05
簡(jiǎn)溪金,男,1987年生,工程師,現(xiàn)從事環(huán)衛(wèi)車(chē)輛設(shè)計(jì)研發(fā)。
2017-06-30