宏微直線壓電電機微驅動機構設計與分析*
2017-09-12 07:07:16張鐵民李晟華廖貽泳
振動、測試與診斷 2017年4期
張鐵民,李晟華,梁 莉,廖貽泳,曹 飛,文 晟
(1.華南農業大學工程學院 廣州,510642)(2.國家生豬種業工程技術研究中心 廣州,510642)
宏微直線壓電電機微驅動機構設計與分析*
張鐵民1,2,李晟華1,梁 莉1,廖貽泳1,曹 飛1,文 晟1
(1.華南農業大學工程學院 廣州,510642)(2.國家生豬種業工程技術研究中心 廣州,510642)
為了解決宏微驅動直線壓電電機微驅動位移較小、對宏動定位誤差的補償能力不足的問題,提出一種宏微驅動鈸型直線壓電電機。采用鈸型復合壓電疊堆為驅動單元替換壓電陶瓷片組成的壓電疊堆,實現軸向位移的一次放大,通過彈性撥齒的柔性鉸鏈結構將鈸型壓電疊堆輸出的微位移二次放大。該電機可在特定的驅動頻率、工作電壓和相位差下實現振子振動模態下的超聲驅動,也可以通過微位移放大機構實現靜態變形的微驅動(蠕動)。建立了該直線壓電電機的三維有限元模型,利用有限元軟件分別對彈性撥齒、鈸型壓電疊堆和復合振子進行靜力學分析和靜態優化設計。有限元仿真表明:基于柔性鉸鏈結構的彈性撥齒經過優化后,最小剛度小于鈸型壓電疊堆的最小剛度;在相同條件下,優化后鈸型壓電疊堆沿軸向方向的靜態變形量比由壓電陶瓷片組成的壓電疊堆的靜態變形量提高了8.45倍;采用基于柔性鉸鏈結構的彈性撥齒和鈸型壓電疊堆組成的復合振子的撥齒質點沿水平方向的靜態位移量比優化前提高了12.1%,大幅提高了微驅動對宏動定位誤差的補償能力,為壓電電機微驅動的結構設計及優化提供依據。
壓電電機;微驅動;柔性鉸鏈;鈸型壓電疊堆
引 言
隨著社會發展,對傳統制造加工行業的運動速度和定位精度提出了越來越高的要求。從20世紀80年代中后期開始,國內外學者相繼提出了宏微雙重驅動技術[1-4]。其中,宏微型壓電電機具有分辨率高、響應快、體積小和效率高等優點,廣泛應用在超精密加工領域[5]。宏驅動部分完成電機高速度、大行程和低分辨率的工作,微驅動部分則負責行程小、分辨率高的任務,并用來補償宏驅動位移誤差和抑制殘余振動[6]。節德剛等[7]研制出一種宏微雙重驅動精密定位機構,進行了建模和控制方法研究。該系統的動態和穩態性能良好,不足之處在于,雖然在宏動部分采用高性能直線電機取代“旋轉伺服電動機+滾珠絲杠”,但始終無法實現定位機構微型化和宏微驅動切換的快速響應。Kim等[8]設計了一種基于自移動細胞式的宏微直線壓電電機,該電機由彈性殼結構和壓電疊堆驅動器組成。試驗表明,在宏運動中激勵頻率為80Hz的條件下,該電機最大速度可達到1.05mm/s,最大輸出力為4.3N;在微運動中通過引入補償電壓來消除第1個移動細胞的滯后性,該電機實現了12nm的最高分辨率。張鐵民等[9-11]提出了一種基于壓電轉換的宏微驅動集于一體的新型直線壓電電機。曹飛[12]研究發現,通過對不同尺寸參數進行靈敏度分析,可分別對壓電電機宏、微驅動進行優化。
筆者在此基礎上對該電機進行結構改進和優化設計,用鈸型復合壓電疊堆為驅動單元以替換純壓電陶瓷片組成的壓電疊堆,將彈性撥齒改進為帶有柔性鉸鏈的彈性撥齒結構,以進一步增加宏微驅動的直線壓電電機微位移,達到提高微驅動對宏動誤差補償能力的目標。
1 壓電電機的結構和工作原理
圖1為壓電電機的結構分解圖。電機動子即為電機的輸出軸,電機定子由左右兩端的端蓋、壓電疊堆和彈性撥齒組成。壓電疊堆為多片沿軸向極化的圓環型壓電陶瓷,并由端蓋與彈性撥齒之間的螺紋連接實現壓緊。定子工作前,調整緊固螺栓施加合適的預壓力使彈性撥齒中間的撥齒夾緊動子。當定子兩端的壓電疊堆同時接上特定的交變電壓后,利用壓電疊堆的逆壓電效應激發出定子工作所需的振動模態,在定子彈性撥齒的撥齒處形成橢圓運動軌跡,依靠動子與撥齒的摩擦,從而驅動電機動子做大行程的高速直線運動,即宏驅動運動。當把交變電壓信號切換成直流電壓信號,壓電疊堆發生靜態變形,依靠撥齒與動子的摩擦,從而驅動電機動子做高分辨率的低速直線運動,即微驅動運動。文獻[9-10]的試驗表明,該壓電電機能實現宏、微直線運動,在200V的直流電壓下微驅動位移僅為2.0×10-7m,在實際應用中較小的位移無法補償宏動定位誤差,造成該電機的定位精度下降。為此,筆者提出用鈸型壓電疊堆替代壓電疊堆,以增加宏微直線壓電電機的微驅動位移范圍。
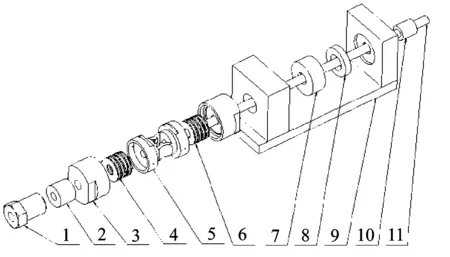
1-緊固螺栓;2-光軸;3-端蓋;4-接線端子;5-彈性撥齒;6-壓電陶瓷;7-套筒;8-橡膠墊圈;9-機架;10-直線軸承;11-電機動子圖1 壓電電機結構分解圖Fig.1 Structure exploded view of piezoelectric motor
2 鈸型壓電疊堆結構及微位移放大原理
圖2為傳統壓電疊堆結構示意圖。它由4片沿軸向方向極化的壓電陶瓷圓環極性相反相互貼合成一組。作為驅動源,壓電疊堆將外界的電壓信號轉化成機械變形,其變形量大小直接影響動子的位移量。為增大壓電疊堆的變形量,筆者考慮用鈸型壓電疊堆替代傳統壓電疊堆。鈸型壓電疊堆是用粘接劑把兩片金屬鈸蓋和兩片沿軸向方向極化的圓環型壓電陶瓷粘接組成的復合結構,其結構示意圖如圖3所示。其中,金屬鈸蓋與壓電陶瓷圓環耦合作用改變壓電陶瓷圓環的應力分布,并將徑向應力轉變成軸向應力,使得沿厚度方向極化壓電陶瓷圓環的壓電常數d31和d33產生的壓電效應相加[13]。在相同的激勵條件以及d31不變的情況下,鈸型壓電疊堆的等效壓電常數d33比相同尺寸壓電陶瓷本身提高40倍[14]。
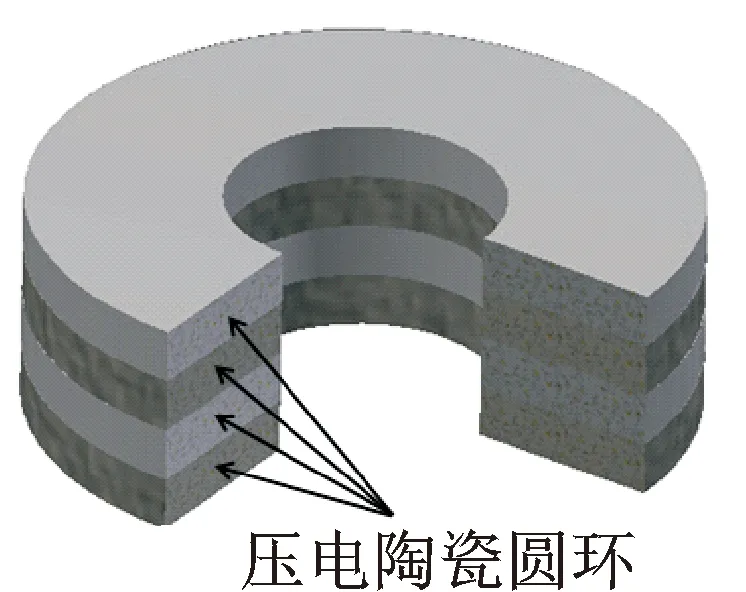
圖2 壓電疊堆結構示意圖Fig.2 Structural schematic of piezoelectric stack
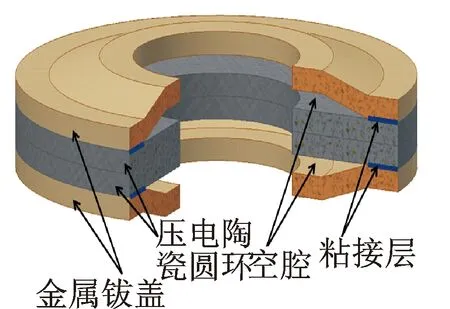
圖3 鈸型壓電疊堆結構示意圖Fig.3 Structural schematic of cymbal piezoelectric stack
鈸型壓電疊堆在施加電壓之后,壓電陶瓷產生變形,從而引起金屬鈸蓋發生軸向變形,如圖4所示。由于體積不變,在施加正向電壓時,壓電陶瓷軸向伸長,徑向縮小2ε,從而引起單片金屬鈸蓋在豎直方向上的軸向變形μ,如圖4(a)所示。在沒有施加電壓的時候,鈸型壓電疊堆沒有發生變形,如圖4(b)所示。在施加反向電壓時,壓電陶瓷軸向縮短,徑向伸長2ε,從而引起單片金屬鈸蓋在豎直方向的軸向變形,如圖4(c)所示。
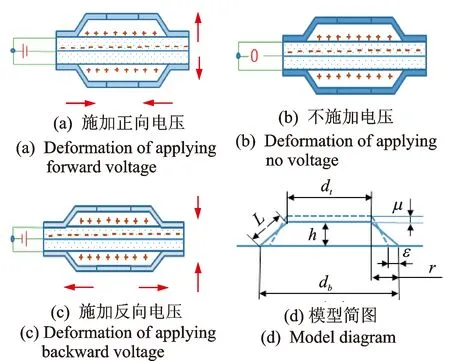
圖4 鈸型壓電疊堆變形示意圖Fig.4 Deformation schematic of cymbal piezoelectric stack
在金屬鈸蓋斜邊的長度L不變的條件下,根據圖4(d)所示的幾何關系得到
(1)
化簡后,得到單個金屬鈸蓋的軸向位移為

(2)
其中:h為鈸蓋空腔的高度;ε= -d31Edb/2為金屬鈸蓋和壓電陶瓷圓環的徑向位移;d31為徑向壓電常數分量;E為激勵電場強度;db為金屬鈸蓋底部直徑;r=(db-dt)/2為金屬鈸蓋上、下半徑差;dt為金屬鈸蓋頂部直徑。
鈸型壓電疊堆在正電場激勵下的軸向總位移為
Δ=2μ+2Δz
(3)
其中:Δz=d33Et為單片壓電陶瓷圓環在激勵電場E作用下的軸向伸長量;t為壓電陶瓷厚度。
顯然,鈸型壓電疊堆的軸向變形量與金屬鈸蓋的結構尺寸參數和壓電陶瓷的結構尺寸參數、材料屬性有關。
3 微位移放大彈性撥齒結構
微位移放大彈性撥齒結構對壓電電機直線運動性能影響非常大。微驅動時,鈸型壓電疊堆的微位移能否傳遞到撥齒上,宏驅動時,能否在撥齒上形成橢圓運動軌跡并加以放大,都取決于微位移放大彈性撥齒的結構。圖5為微位移放大彈性撥齒結構初始結構[9,11]。它既能在宏驅動中使它的撥齒質點形成橢圓運動,進而驅動動子實現宏觀的直線運動,又能在微驅動中其螺紋端部產生彈性變形,將壓電疊堆的微位移傳遞給動子。
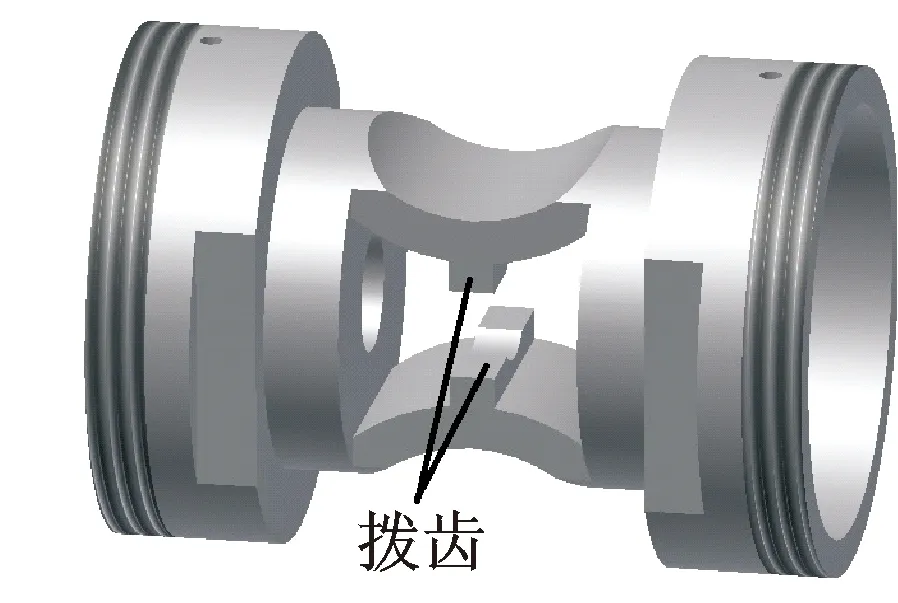
圖5 優化前彈性撥齒結構示意圖Fig.5 Structural schematic of elastomer before optimization
試驗發現,由于壓電疊堆的剛度較小,微位移放大彈性撥齒剛度較大,使鈸型壓電疊堆的微位移未能完全傳遞到撥齒上,進而導致動子的移動量較小。為此,筆者對微位移放大彈性撥齒進行改進,改進后彈性撥齒的結構如圖6所示。在結構各聯接處增加柔性鉸鏈,以便將微位移二次放大[15-16],并降低微位移放大彈性撥齒的剛度,使其與壓電疊堆的剛度相當。當鈸型壓電疊堆產生軸向變形時,推動端面繞著柔性鉸鏈的最小厚度處微旋轉,從而帶動撥齒水平移動,起到增加動子微位移量的目的。
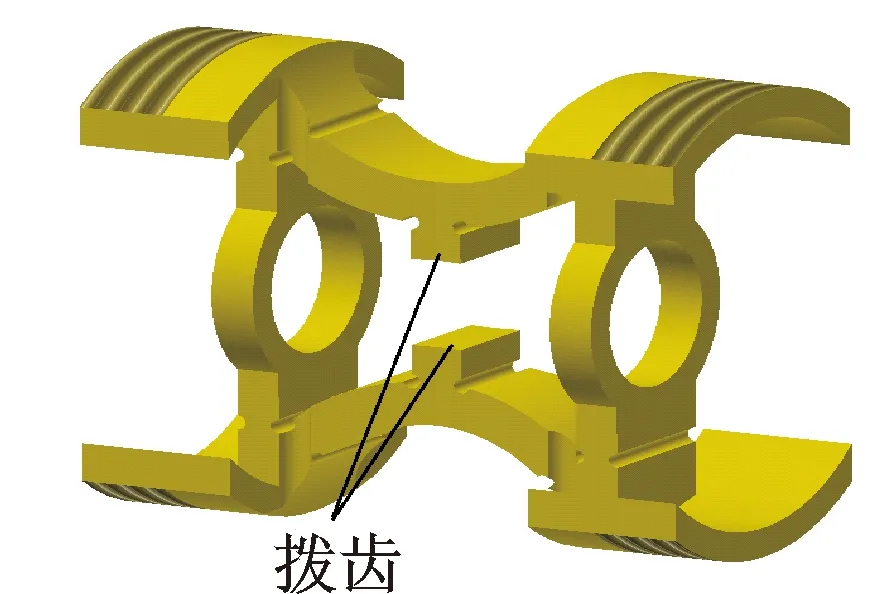
圖6 優化后彈性撥齒結構示意圖Fig.6 Structural schematic of elastomer after optimization
4 有限元分析及優化
首先,確定電機的初始結構參數,建立參數化的有限元模型;然后,通過靈敏度分析選擇結構參數作為優化設計變量[9-10],確定參數的變化范圍,明確優化目標函數;最后,選擇優化方法,通過一系列的循環過程優化各設計變量,直到達到最優。
4.1 復合振子有限元模型
復合振子的有限元模型如圖7所示。按照默認設置進行智能化,網格劃分為170 860個單元和538 322個節點,端蓋材料為45#不銹鋼,鈸型壓電疊堆的金屬鈸蓋和彈性撥齒為鈹青銅,壓電陶瓷為PZT-4。材料屬性參數如表1所示。
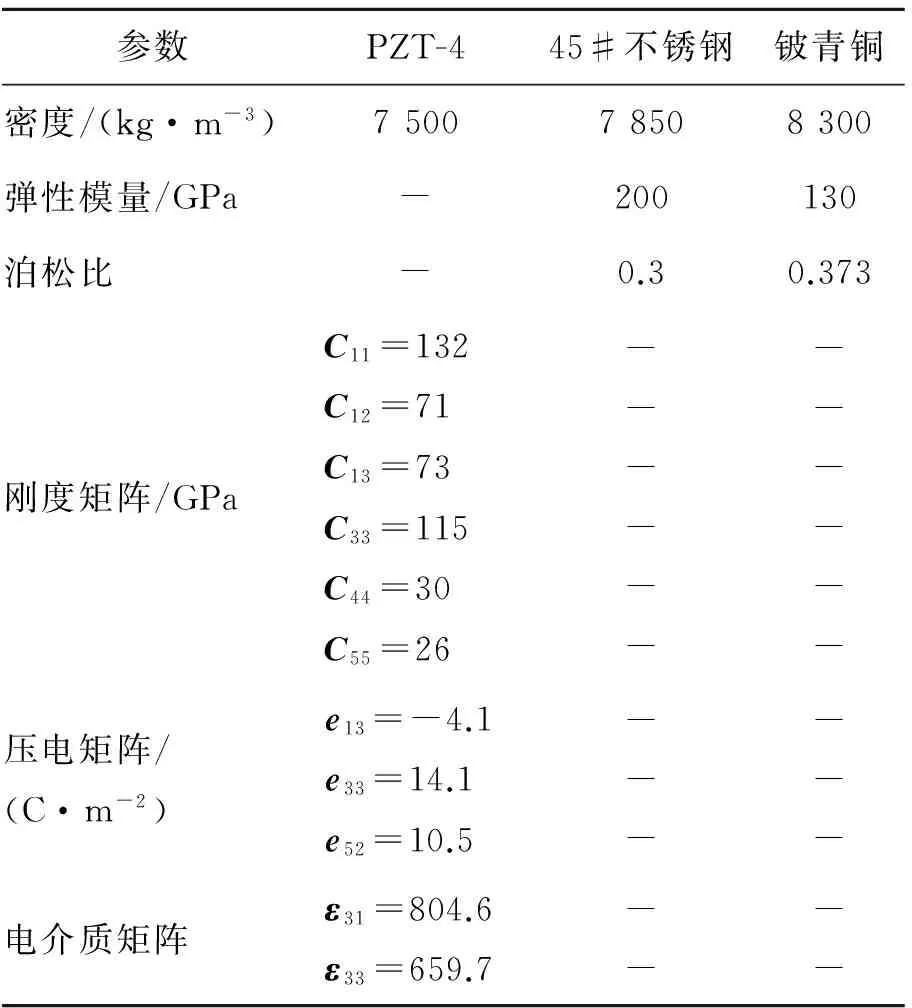
表1 材料屬性參數Tab.1 Parameter list of material property
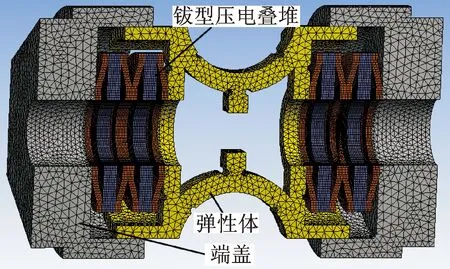
圖7 復合振子的有限元模型Fig.7 Finite element model of composite vibrator
4.2 彈性撥齒靜力學分析及優化
當彈性撥齒的材料參數確定后,其性能取決于彈性撥齒的結構參數。彈性撥齒的結構參數如圖8所示。通過靈敏度分析確定彈性撥齒的結構參數如表2所示[9-10]。
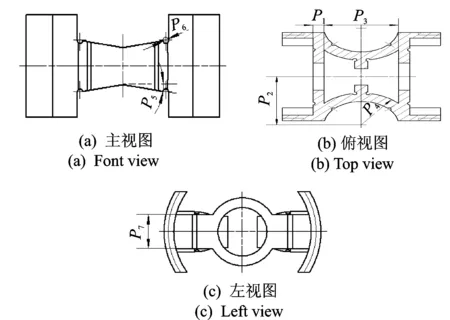
圖8 彈性撥齒的結構參數Fig.8 Structure parameters of elastomer
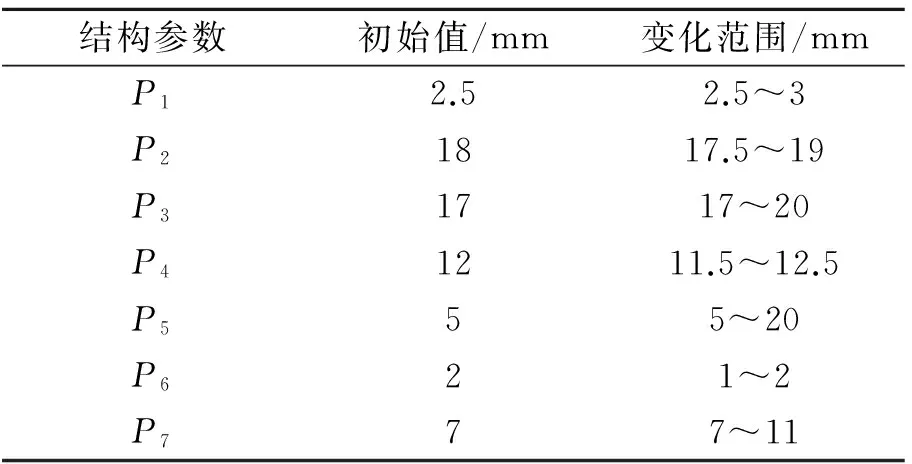
表2 彈性撥齒的結構參數Tab.2 Structural parameters table of elastomer
在彈性撥齒與鈸蓋的接觸面上,給彈性撥齒施加均布載荷100 N,在彈性撥齒兩端面施加水平和豎直方向的零位移約束,同時選取該面的位移S1、彈性撥齒質點的位移S2和最大等效應力σ1作為優化目標,對彈性撥齒進行靜力學分析。ANSYS WORKBENCH根據自身的優化算法對各個參數在設定的變化范圍內進行組合,并重建模型進行靜力學分析。經過50次計算結果如表3所示。
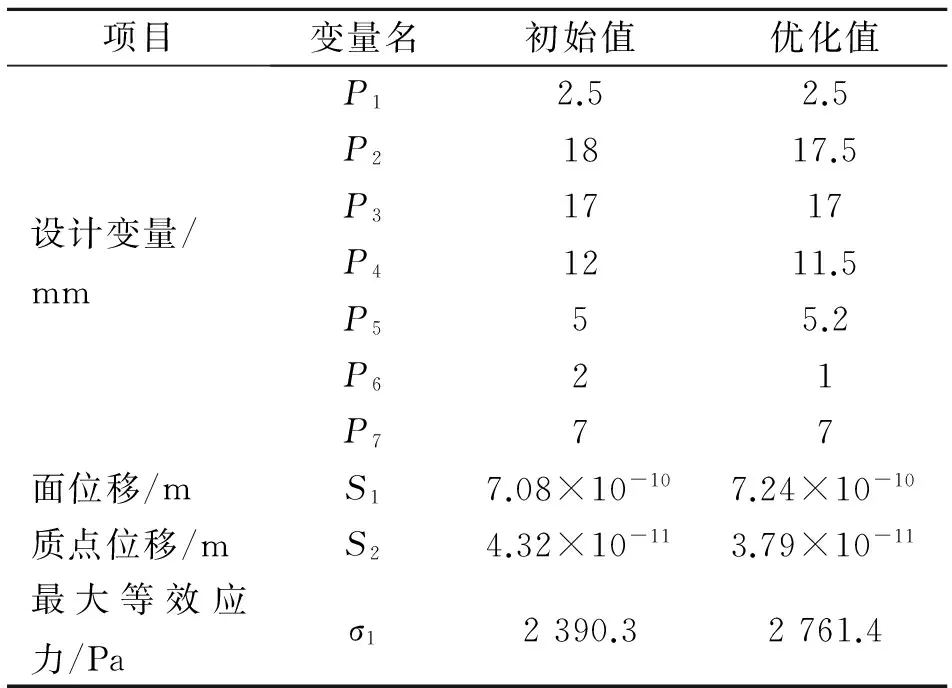
表3 優化前后設計變量及目標函數Tab.3 Design variables and objective functions before and after optimization
彈性撥齒經過優化后,最小剛度從1.41×1011N/m減少到1.38×1011N/m,最大等效應力為2 761.4 Pa,遠小于材料的許用應力。
4.3 鈸型壓電疊堆靜力學分析及優化
在第1組靜力學分析中,對鈸型壓電疊堆正電極面施加100 V的直流電壓,負電極為0 V,經ANSYS有限元軟件計算,得到鈸蓋最大輸出微位移S3。在第2組靜力學分析中,對鈸蓋施加均布載荷100N,將鈸蓋最大變形量S4和最大等效應力σ2作為求解目標。其結構參數如圖9所示。采用靈敏度分析法確定鈸型壓電疊堆結構參數如表4所示。
圖9 鈸型壓電疊堆結構參數Fig.9 Structure parameters of cymbal piezoelectric stack
表4 鈸型壓電疊堆的結構參數Tab.4 Structural parameters table of cymbal piezoelectric stack
對優化目標S3,S4和σ2求最大值,經過30次計算結果如表5所示。鈸型壓電疊堆經過優化后,最小的剛度從2.82×1010N/m增加到1.8×1011N/m,最大等效應力為1.4 MPa,遠小于材料的許用應力。
表5 優化前后設計變量及目標函數Tab.5 Design variables and objective functions before and after optimization
傳統壓電疊堆是用粘接劑把沿軸向極化的圓環型壓電陶瓷粘接組成的結構。在其正電極面上施加幅值為100 V的直流電壓,負電極為0 V,靜力學計算結果如圖10所示。其中,壓電疊堆沿軸向方向的變形量為3.07×10-8m。優化后的鈸型壓電疊堆在相同條件下沿軸向的變形量為2.9×10-7m,比壓電疊堆的軸向變形量提高了8.45倍。鈸型壓電疊堆的最小剛度高于彈性撥齒的最小剛度,滿足設計要求。
圖10 壓電疊堆在軸向方向的變形量Fig.10 Deformation in the axial direction of piezoelectric stack
4.4 復合振子靜力學分析
在復合振子的鈸型壓電疊堆上施加100V直流電壓,對兩端的端蓋施加位移約束,優化后的復合振子靜力學分析的結果如圖11(a)所示。其中彈性撥齒質點在鈸型壓電疊堆驅動作用下沿水平方向的位移量為1.82×10-8m,對優化前電機施加相同的約束后計算結果如圖11(b)所示。其中,撥齒質點相應的位移量為1.39×10-9m,相比之下,優化后的位移量比優化前增大了12.1%。

圖11 復合振子的靜態變形Fig.11 Static deformation of composite vibrator
5 結 論
1) 基于柔性鉸鏈結構的彈性撥齒經過優化后,最小剛度從1.41×1011N/m減少到1.38×1011N/m。鈸型壓電疊堆經優化后,最小剛度從2.82×1010N/m增加到1.8×1011N/m。前者的最小剛度小于后者,有利于靜態變形的可靠傳遞。
2) 在相同條件下,優化后鈸型壓電疊堆沿軸向方向的靜態變形量為2.9×10-7m。純壓電陶瓷片組成的壓電疊堆沿軸向方向的靜態變形量為3.07×10-8m。前者比后者提高了8.45倍。
3) 基于柔性鉸鏈結構的彈性撥齒和鈸型壓電疊堆的復合振子的撥齒質點沿水平方向的靜態位移量比優化前提高了12.1%。仿真結果表明,筆者提出的宏微驅動型壓電電機的新型微驅動結構可行,微位移量明顯增大。
4) 提出的新型微驅動結構電機能否按照設想進行運動,還需結合宏驅動進行研究。因此本課題組將在此微驅動基礎上對宏驅動結構進行進一步設計,使電機的彈性撥齒能產生橢圓運動軌跡。
[1] Sharon A,Hogan N,Hardt D E.High bandwidth force regulation and inertia reduction using a macro/micro manipulator system[C]∥Proceedings of the 1988 IEEE International Conference on Robotics and Automation.[S.l.]:IEEE,1988:126-132.
[2] Morrell J B,Salisbury J K.Parallel-coupled micro-macro actuators[J].The International Journal of Robotics Research,1998,17(7):773-791.
[3] Weber T E,Hollis R L.A vision based correlator to actively damp vibrations of a coarse-fine manipulator[C]∥Proceedings of the 1989 IEEE International Conference on Robotics and Automation.[S.l.]:IEEE,1989:818-825.
[4] 陳啟軍,王月娟.激光作業的宏-微機器人及其控制系統[J].機器人,1999,21(3):128-133.
Chen Qijun,Wang Yuejuan.Macro/micro manipulator and control system driven by laser[J].Robot,1999,21(3):128-133.(in Chinese)
[5] 劉落實,張鐵民,張建桃.直線型超聲電機在機床進給系統中的應用[J].組合機床與自動化加工技術,2004(5):32-34.
Liu Luoshi,Zhang Tiemin,Zhang Jiantao.Application of linear ultrasonic motor on machine tool′s feeding system[J].Modular Machine Tool &Automatic Manufacturing Technique,2004(5):32-34.(in Chinese)
[6] 徐源.宏微驅動超精密定位工作臺在磨床上的應用研究[D].上海:東華大學,2008.
[7] 節德剛,劉延杰,孫立寧,等.一種宏微雙重驅動精密定位機構的建模與控制[J].光學精密工程,2005,13(2):171-178.
Jie Degang,Liu Yanjie,Sun Lining,et al.Modeling and control of a macro micro dual drive ultra-precision positioning mechanism[J].Optics and Precision Engineering,2005,13(2):171-178.(in Chinese)
[8] Kim J,Kang B.Micro-macro linear piezoelectric motor based on self-moving cell[J].Mechatronics,2009,19(7):1134-1142.
[9] Zhang Tiemin,Cao Fei,Li Shenghua,et al.Finite element study on the cylindrical linear piezoelectric motor micro driven[C]∥Intelligent Robotics and Applications.[S.l.]:Springer International Publishing,2014:179-186.
[10] Zhang Tiemin,Cao Fei,Li Shenghua,et al.FEM analysis and parameter optimization of a linear piezoelectric motor macro driven[C]∥Intelligent Robotics and Applications.[S.l.]:Springer International Publishing,2014:171-178.
[11] 張鐵民.宏/微雙重驅動新型直線電機的研究[J].機電工程技術,2015,44(6):1-6.
Zhang Tiemin.Study on a new type of linear motor with macro-micro dual drive[J].Mechanical &Electrical Engineering Technology,2015,44(6):1-6.(in Chinese)
[12] 曹飛.宏微驅動直線壓電電機結構設計及試驗研究[D].廣州:華南農業大學,2014.
[13] 王光燦,林宇,王麗坤,等.Cymbal換能器的有限元動力學分析[J].壓電與聲光,2003,25(5):418-421.
Wang Guangcan,Lin Yu,Wang Likun,et al.Dynamics analysis of Cymbal-type transducer with finite element method[J].Piezoelectrics &Acoustooptics,2003,25(5):418-421.(in Chinese)
[14] Dogan A,Uchino K,Newnham R E.Composite piezoelectric transducer with truncated conical endcaps "Cymbal"[J].IEEE Transactions on Ultrasonics,Ferroelectrics and Frequency Control,1997,44(3):597-605.
[15] 吳鷹飛,周兆英.柔性鉸鏈的應用[J].中國機械工程,2002,13(18):1615-1618.
Wu Yingfei,Zhou Zhaoying.Application of flexure hinge[J].China Mechanical Engineering,2002,13(18):1615-1618.(in Chinese)
[16] 張建瓴,陳萬銀,可欣榮,等.一種微位移放大機構的設計與仿真[J].機械設計,2009,26(12):9-12.
Zhang Jianling,Chen Wanyin,Ke Xinrong,et al.Design and simulation of a kind of micro-displacement amplification mechanism[J].Journal of Machine Design,2009,26(12):9-12.(in Chinese)

10.16450/j.cnki.issn.1004-6801.2017.04.009
* 國家自然科學基金資助項目(51177053);廣東省教育廳科技創新重點資助項目(2012CXZD0016);高等學校博士學科點專項科研基金資助項目(20124404110003);廣州市科技計劃資助項目(201510010227);廣東省科技計劃資助項目(2014A020208090)
2015-07-04;
2015-08-10
TN384;TH113.1
張鐵民,男,1961年11月生,博士、教授、博士生導師。主要研究方向為微機電系統、機器人技術和智能檢測與控制技術。曾發表《基于DM642的高地隙小車的田間路徑識別導航系統》(《農業工程學報》2015年第31卷第4期)等論文。 E-mail:tm-zhang@163.com
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
哲學評論(2021年2期)2021-08-22 01:53:34
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中華詩詞(2020年1期)2020-09-21 09:24:52
中華詩詞(2019年7期)2019-11-25 01:43:04
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
