一種新型電磁作動器電磁力影響參數分析*
2017-09-12 07:07:16寧一高張仰成
振動、測試與診斷 2017年4期
關鍵詞:模型
寧一高 ,石 勇 ,張仰成
(1.哈爾濱工程大學動力與能源工程學院 哈爾濱,150001)(2.北京衛星制造廠 北京,100190)
一種新型電磁作動器電磁力影響參數分析*
寧一高1,石 勇1,張仰成2
(1.哈爾濱工程大學動力與能源工程學院 哈爾濱,150001)(2.北京衛星制造廠 北京,100190)
針對各參數對一種新型電磁作動器電磁力影響機理的問題,利用ANSYS軟件建立了該電磁作動器的電磁力仿真計算模型,并對加工好的樣機電磁力進行試驗測量。結果表明,仿真計算結果能夠與試驗數據很好的吻合,最大相對誤差僅為11.6%,從而驗證了仿真模型的有效性。利用該仿真模型分析了齒高、線圈匝數、齒數、氣隙、銜鐵厚度和軛鐵厚度等參數對電磁力的影響,揭示了其影響機理,為這種電磁作動器的進一步優化設計奠定了基礎,對類似結構的電磁執行器的設計具有一定的參考價值。
電磁作動器; 電磁力; 仿真計算; 試驗測量; 影響參數
引 言
動力機械是艦船的主要振動噪聲源之一,其嚴重損害船員的身心健康,影響艦船的戰斗能力。采用隔振裝置將動力設備彈性安裝,能夠有效減小傳遞到船體結構上的振動,是艦船減振降噪的最重要技術手段之一[1]。半主動隔振系統與被動式隔振系統相比,具有能適應外擾頻率變化,有效隔離低頻振動的優點;與主動隔振系統相比,需要的附加能源少、價格低,且整個系統比較簡單、可靠性高[2]。
作動器是隔振系統的關鍵部件,對隔振效果起到至關重要的作用。半主動隔振系統的作動器根據原理主要分為可變阻尼式和可變剛度式兩大類,已經得到了較為廣泛的研究。Guglielmino等[3]對液壓驅動摩擦式阻尼器進行了研究。Suda等[4]對電磁阻尼器進行了研究。文獻[5-6]對磁流變液阻尼器進行了研究。李銳等[7]以短型浮置板軌道隔振為例,對磁流變隔振器阻尼參數進行了優化研究。文獻[8]對智能彈簧進行了研究。周卓亮[9]利用齒形結構的電磁彈簧,設計了可變剛度隔振器,并進行了初步的半主動隔振試驗。石勇等[10]設計了一種新型變齒距齒寬電磁作動器,相比定齒距齒寬電磁作動器具有線性度好、易控制等優點。
電磁力是電磁作動器的最重要性能指標之一。針對變齒距齒寬電磁作動器涉及機、電、磁多物理場耦合導致其各參數對電磁力的影響機理還不清楚的問題,筆者采用ANSYS軟件建立了電磁作動器的仿真模型,并對該模型進行了試驗驗證。利用該仿真模型分析了各參數對電磁力的影響規律,并揭示了相應的影響機理。
1 新型電磁作動器結構和工作原理
以圖1所示的單自由度隔振系統為例,設其沿垂直方向受到的外擾力為F=F0sin(ωt),傳至地面的力的幅值為FT,則力的傳遞率為

(1)
由式(1)可以看出,在不同的外擾頻率ω下,恰當地改變系統的剛度k、阻尼c或質量m都可以降低力的傳遞率,從而改善隔振效果。
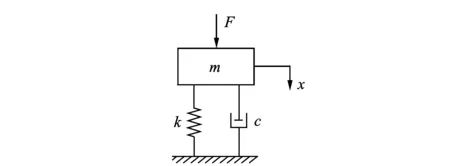
圖1 單自由度隔振系統Fig.1 Single-degree-of-freedom vibration-isolation system
筆者研究的新型電磁作動器是通過在不同工況下改變系統剛度來實現良好隔振效果的,其結構如圖2所示,它是根據反應式步進電機的原理工作的。可以看出,在殼體、法蘭和銜鐵相對的工作面上開有變齒寬的小齒,相對的齒面間存在一定大小的氣隙。當不發生振動時,殼體、法蘭上的齒和銜鐵上的齒是對齊的,作動器對外不產生作用力。當發生振動時,銜鐵上的齒與殼體、法蘭上的齒發生相對位移,作動器就會對外產生軸向作用力,力的大小與相對位移的大小在一定范圍內基本成線性關系。通過改變線圈繞組上驅動電流的大小,可以改變作動器的位移-力特性曲線的斜率,即改變系統的剛度,從而實現良好的隔振效果。
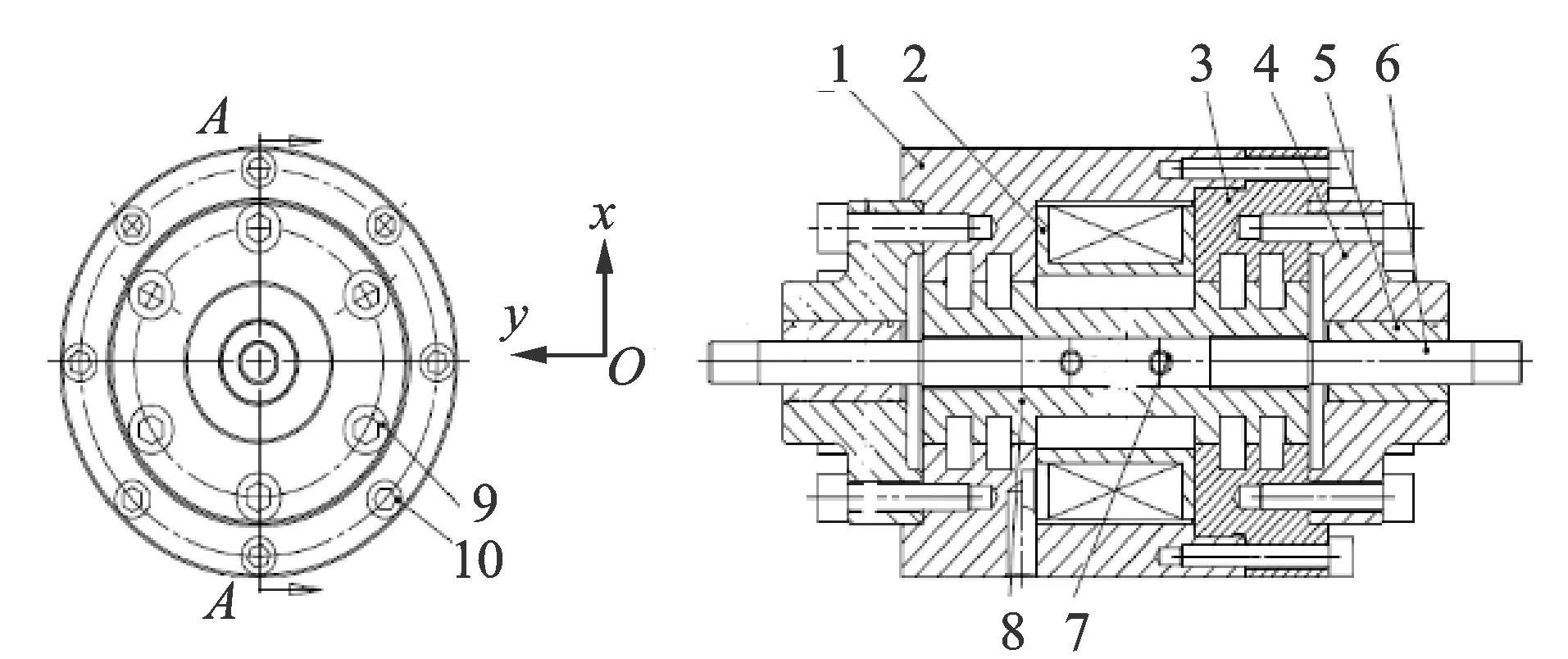
1-殼體;2-線圈架;3-法蘭;4-軸承端蓋;5-直線軸承;6-主軸;7-彈性圓柱銷;8-銜鐵;9,10-螺栓圖2 新型電磁作動器結構圖Fig.2 Schematic of novel electromagnetic actuator
2 仿真模型的建立
2.1 有限元計算的數學原理
求解電磁場問題的基本公式為麥克斯韋微分方程組,但由于電磁變量相互交織在一起,且都為矢量,求解難度大。通過定義標量電勢和矢量磁勢把電場和磁場變量進行分離,得到獨立的磁場偏微分方程為

(2)
其中:A為矢量磁勢(Wb/m);J為傳導電流密度矢量(A/m2);μ為磁導率(H/m);ε為介電常數(F/m)。
電磁作動器電磁力的求解屬于有源靜態場問題,其電磁場方程可以簡化為泊松方程形式。考慮其完全軸對稱的結構特點,采用二維軸對稱模型進行分析,A和J只有z坐標分量。于是,磁場分布轉化為磁勢函數的二維邊值問題[11]
(3)
其中:Ht為磁場強度的切向分量(A/m);Γ1為狄里克萊邊界條件,即第1類邊界條件,應用于除對稱軸外的邊界;Γ2為諾依曼邊界條件,即第2類邊界條件,應用于對稱軸。
求出Az后,由矢量磁勢的定義,電磁感應強度可由下式進行求解

(4)
其中:ex和ey分別為x軸和y軸方向的單位向量。
筆者采用虛功法求解電磁力
(5)
(6)
其中:Wm為積分區域V內的磁場能量;s為虛位移;Fs為物體受到的s方向的電磁力;λ=const表示虛位移發生過程中磁鏈不變。
2.2 幾何建模和網格劃分
該電磁作動器中的軸承端蓋、線圈架為鋁合金材料LY12,其磁導率接近于空氣,因此建模時將其當做空氣處理,與周圍空氣連成一片。彈性圓柱銷、螺栓和倒角等微小結構以及直線軸承對電磁力的計算影響非常小,建模時予以忽略。銜鐵、法蘭和殼體材料均為電工純鐵DT4,其導磁性能用B-H曲線定義,其中法蘭和殼體采用緊配合,建模時忽略其微小間隙,將法蘭和殼體當作一個整體,而法蘭、殼體上的齒與銜鐵上的齒間留有工作氣隙,為0.5 mm。主軸和線圈均為非導磁材料,相對磁導率和空氣一樣,均設為1。為考慮模型周圍的漏磁,將作動器周圍一定距離的空氣也納入求解場域中,用長度為200 mm,寬度為50 mm的空氣包圍作動器模型。采用ANSYS參數化設計語言建立電磁作動器的二維軸對稱模型,銜鐵與殼體相對位移為零時的模型如圖3所示。選擇的電磁場分析單元為二維8節點單元PLANE53,設置其單元表現為軸對稱。由于幾何模型很不規則,直接采用自由網格劃分,并控制網格精度等級為3。
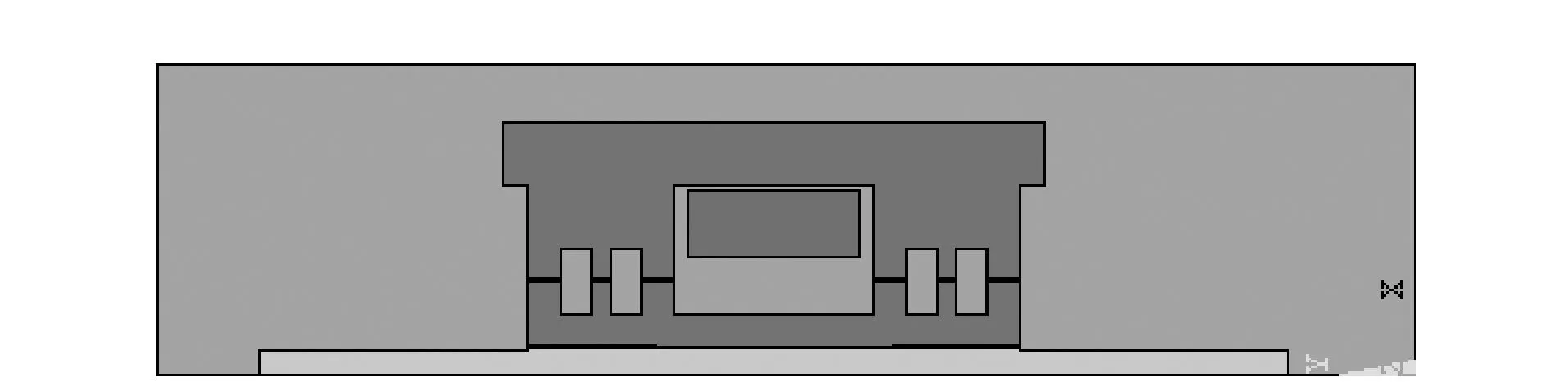
圖3 幾何模型Fig.3 Geometry model
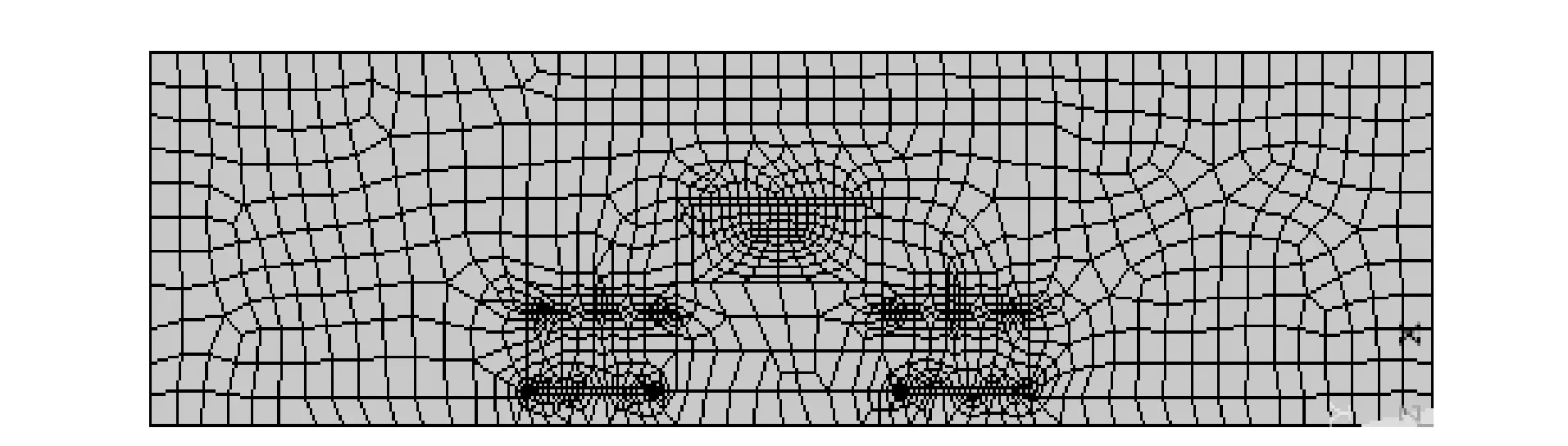
圖4 有限元網格劃分Fig.4 Finite element mesh generation
2.3 施加載荷和求解
將主軸和銜鐵定義為一個單元組件,對其施加力標志,并對線圈施加一定大小的電流載荷。因為主軸材料和空氣的磁導率都非常小,故假設求解域以外沒有漏磁,即滿足磁通量平行條件,將模型對稱軸和空氣邊界上的磁勢Az均設置為零。
考慮到求解的非線性,將加載類型設置為斜坡加載,分兩個載荷步求解,每個載荷步再設置若干載荷子步,并設置每個載荷子步的迭代次數。求解后,可在通用后處理器中查看電磁場分析結果。
3 試驗和仿真結果的對比
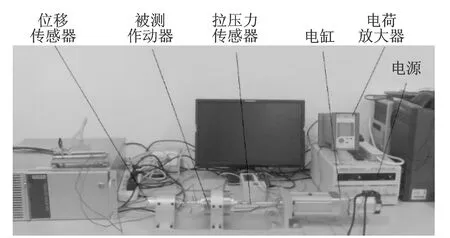
圖5 試驗臺實物圖Fig.5 Figure of test-bed
如圖5所示 ,將位移傳感器、被測作動器、拉壓力傳感器和電缸依次安裝在試驗支架上,并保持良好的同軸度。位移傳感器的輸出為一個電壓信號,通過采集卡送入電腦內,利用電壓與位移一一對應的關系,通過LabVIEW軟件編程求得相應位移。力的測量是利用拉壓力傳感器中壓電晶體的壓電效應產生電荷,通過電荷放大器放大后將力實時數字顯示。試驗時,利用電缸推動被測作動器主軸移動一定位移后停止,調節電源,測出不同電流下作動器輸出的電磁力。改變作動器主軸位移,測出對應不同電流下的電磁力。得到不同電流下電磁力與位移的關系,將其與仿真結果進行比較,如圖6所示。可以看到,仿真結果與試驗數據具有很好的一致性,最大誤差僅為11.6%,從而證明了有限元模型的準確性。
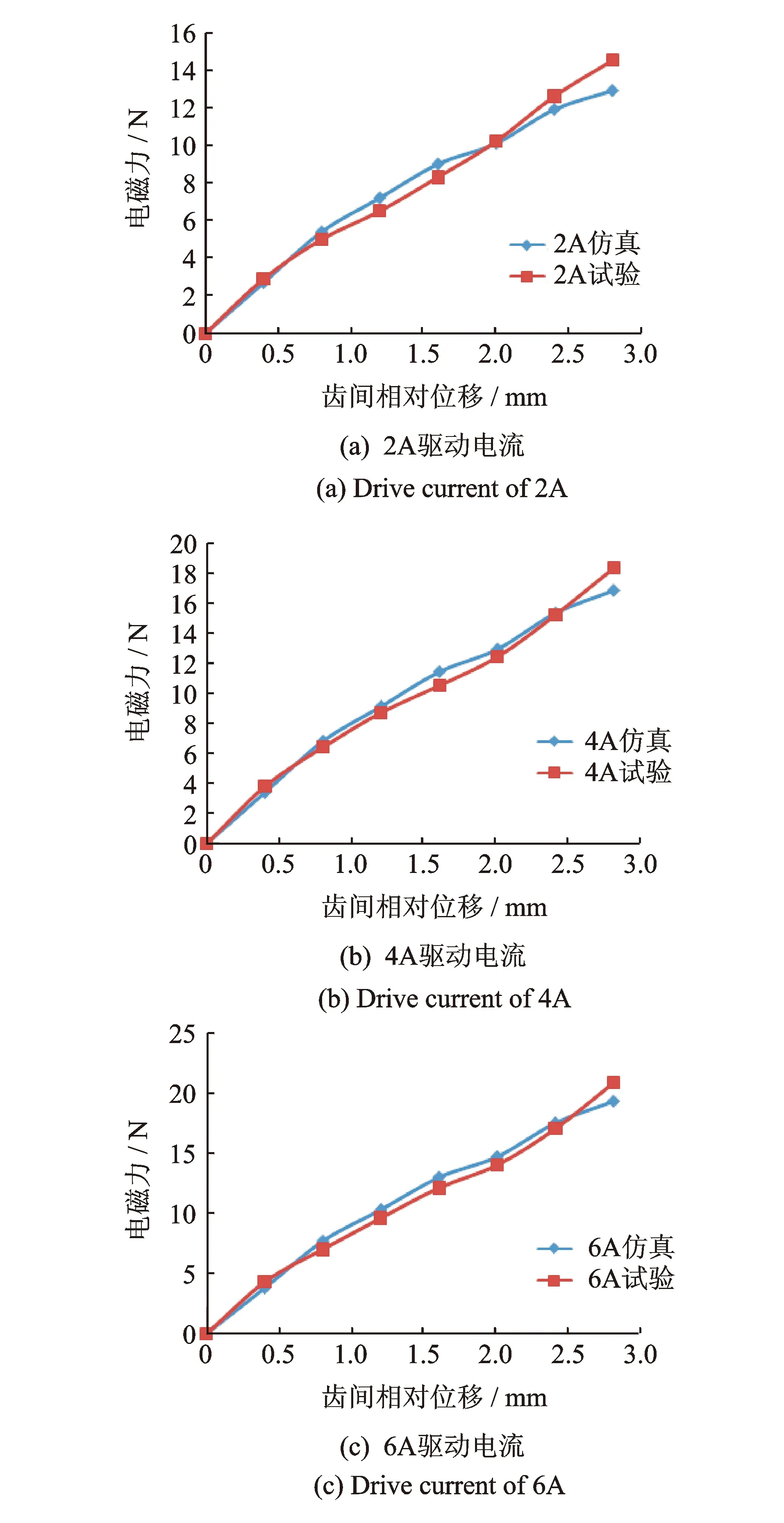
圖6 不同驅動電流下電磁力仿真值與試驗值的對比Fig.6 Comparison of measured and simulation electromagnetic force under different drive current
4 相關參數對電磁力影響規律分析
影響電磁作動器電磁力的參數有齒距、齒寬、齒高、齒數、氣隙、銜鐵厚度、軛鐵厚度、線圈匝數、齒間相對位移和驅動電流等,部分參數如圖7所示。
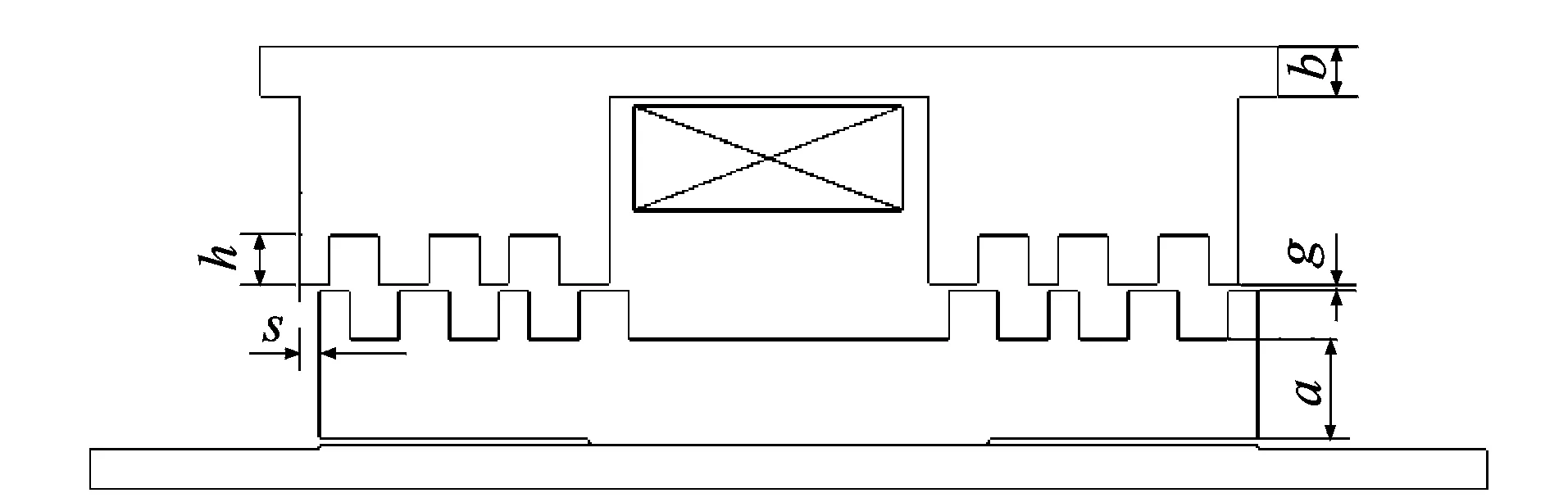
a-銜鐵厚度;b-軛鐵厚度;h-齒高;g-氣隙;s-齒間相對位移 圖7 電磁作動器結構參數圖Fig.7 Structure parameters of electromagnetic actuator
齒距和齒寬對作動器電磁力的大小有一定影響,但主要是影響作動器電磁力-位移特性曲線的形狀[12],在這里不作研究。由于電磁力隨齒間相對位移的變化規律比較明確,即在一定范圍內基本呈線性關系,故筆者只選取相對位移為2 mm時的情況進行研究。驅動電流不同時,各參數變化對電磁力的影響規律不相同,故研究每個參數對電磁力的影響規律時,都計算其在1,2,4和6 A 4種驅動電流下的變化曲線并進行對比分析。其余6個參數的基準值和取值范圍如表1所示,其中,1組齒包括1對大齒和1對小齒。分析某個參數對作動器電磁力的影響時,剩下5個參數取基準值。
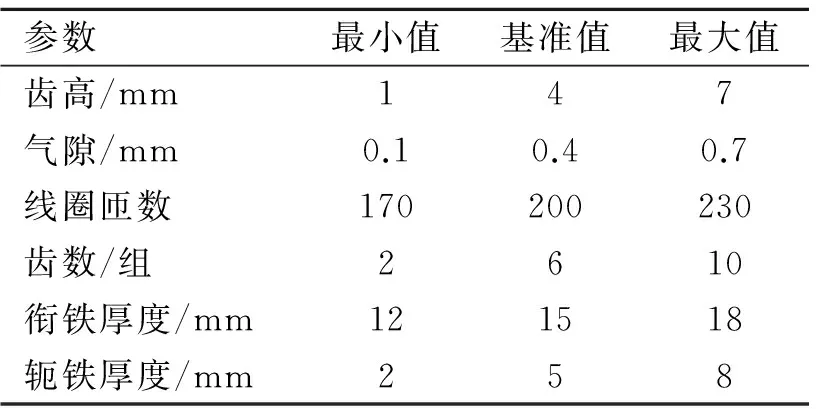
表1 參數基準值及變化范圍Tab.1 Reference value and variations of parameters
4.1 齒高
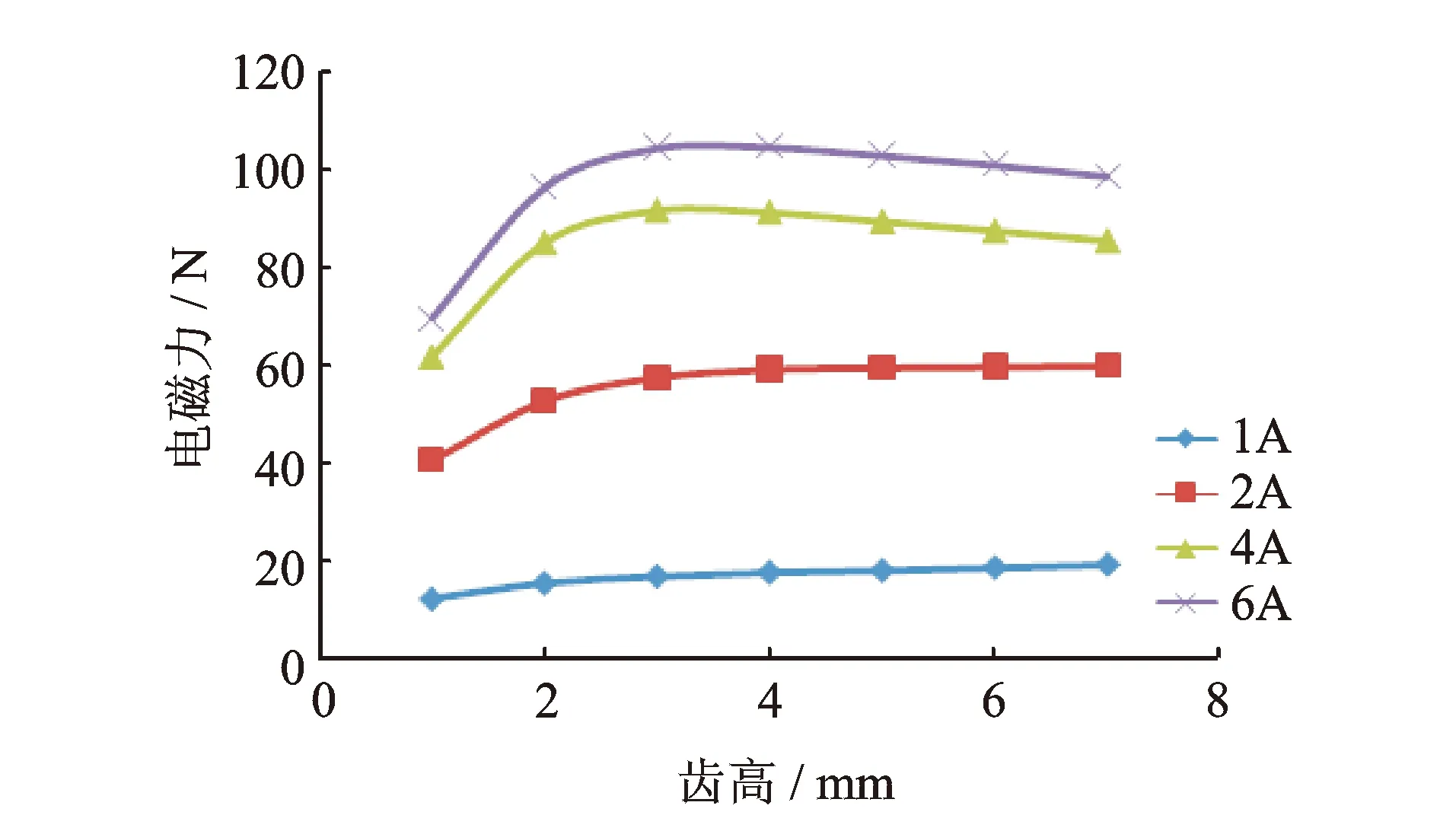
圖8 不同驅動電流下齒高對電磁力的影響Fig.8 Influence of tooth height on electromagnetic force under different drive current
從圖8可以看出,在較大驅動電流下,電磁力隨齒高增大呈現先增大后減小的趨勢。這是因為增加齒高,一方面會使齒槽散磁減少,導致經過齒部的磁通量增加,進而使工作氣隙磁感應強度增大,作動器電磁力增大;另一方面會增大鐵磁部分的磁阻,導致磁路中的磁通量有所減少,作動器電磁力降低。可見,齒高改變引起的電磁力變化是這兩種因素綜合作用的結果。初始時,隨著齒高的增加,齒槽散磁的減少導致電磁力增大起主導作用;當齒高增加到一定程度時,齒槽內的散磁小到可以忽略不計,此時經過齒部的磁通量不再增加,電磁力不再增大,導致鐵磁部分磁阻增加成為影響電磁力變化的主要因素,使整個磁路磁通量減小,作動器電磁力減小。
在較小驅動電流下,齒高從1 mm增加到7 mm,電磁力隨著齒高的增加不斷增大,并沒有出現減小的趨勢,只是增大的程度越來越小。可見,齒高增加導致磁阻增加,進而導致電磁力減小的影響隨驅動電流的減小而減少。
4.2 線圈匝數
在不同驅動電流下,電磁力隨線圈匝數增加均表現出增大的趨勢,如圖9所示。這是因為在驅動電流一定的條件下,線圈匝數增加,會使激勵匝數增大,從而提高電磁力。需要注意的是,在線圈窗口面積一定的條件下,增加線圈匝數必然導致導線線徑的減小,使線圈所能承載的最大安全電流減小。當線圈匝數增大到一定程度時,磁路必將趨于飽和,這將限制電磁力的進一步增大;同時,線圈匝數增多以及導線線徑的減小也導致線圈電阻迅速增大,引起熱損耗增加。
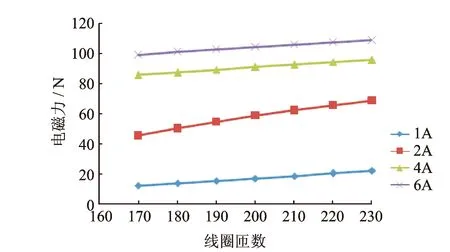
圖9 不同驅動電流下線圈匝數對電磁力的影響Fig.9 Influence of coil turns on electromagnetic force under different drive current
4.3 齒數
電磁作動器的電磁力是由多個齒對間的電磁力疊加而成。在各個齒對間的電磁力不變的情況下,若增加齒數,會使總的電磁力成倍增加。然而,增加齒數必然導致經過每個齒對的磁通量減少,各個齒對間的電磁力減小,從而使作動器總的電磁力有減小的趨勢。齒數改變對電磁力的影響是這兩種因素共同作用的結果。從圖10看出,在小驅動電流的情況下,電磁力隨齒數的增加而增大;在中等驅動電流的情況下,電磁力隨齒數的增加先增大后減小;在大驅動電流的情況下,電磁力隨齒數的增加而減小。這說明齒數增多導致經過各齒對的磁通量減小,使電磁力減小的影響隨驅動電流的增大而增加。
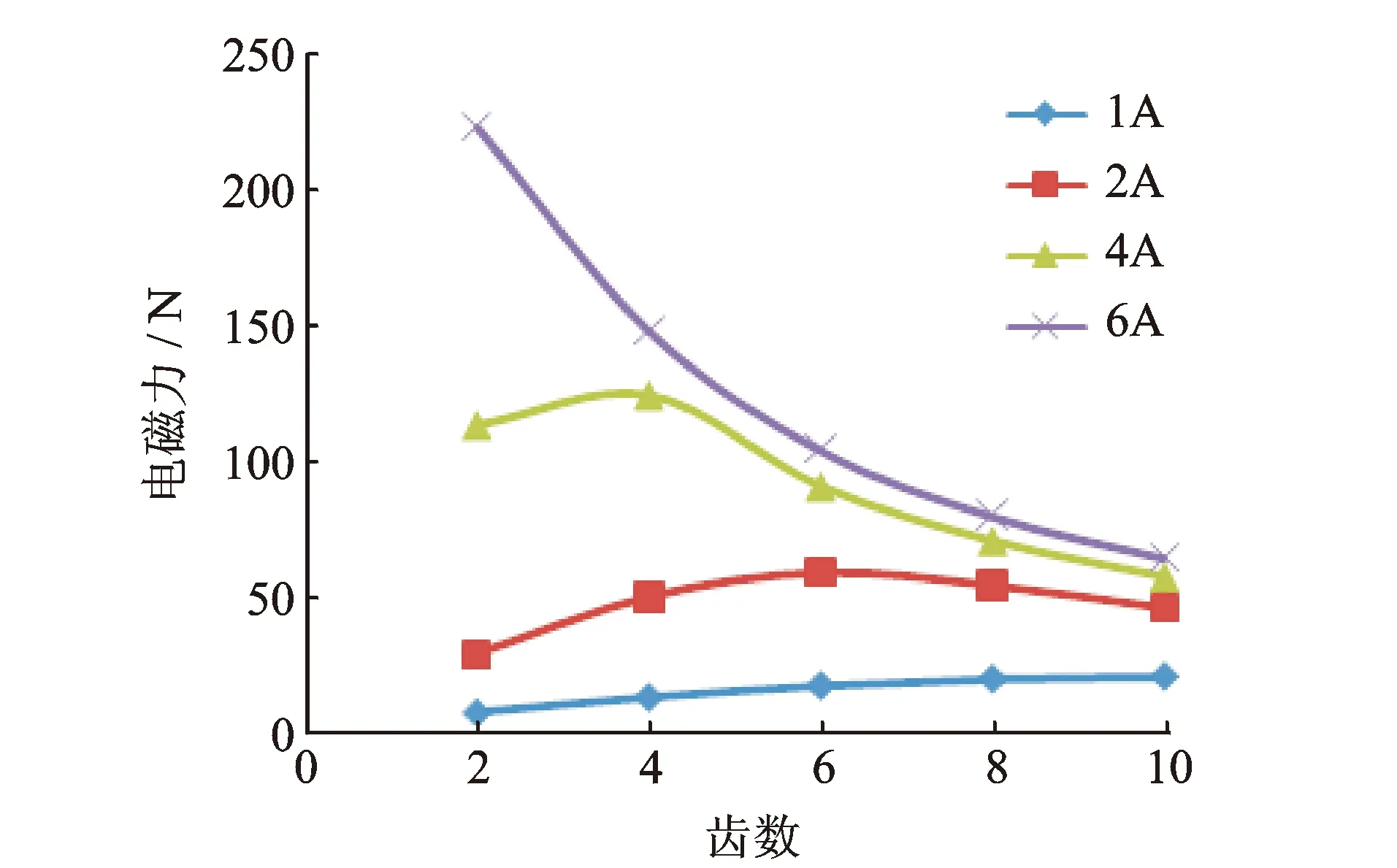
圖10 不同驅動電流下齒數對電磁力的影響Fig.10 Influence of tooth number on electromagnetic force under different drive current
4.4 氣隙
由于空氣的磁導率遠小于電工純鐵DT4的磁導率,故在整個磁路中氣隙的磁阻占整個磁路磁阻的絕大部分,減小氣隙能夠有效減小磁路磁阻、增大磁通量,提高電磁力。從圖11中看到,在小驅動電流下,電磁力隨氣隙的減小而增大。在較大驅動電流的情況下,電磁力隨氣隙的減小表現出先增大后減小的趨勢。這是因為隨著氣隙的減小,磁路磁阻迅速減小,使磁場在銜鐵和軛鐵等處產生飽和現象,導致齒間氣隙處的磁感應強度的增大受到限制。同時,由于氣隙等效導磁面積擴大系數近似與氣隙大小成正比[13],故減小氣隙使得齒間氣隙的等效導磁面積減小。電磁力與氣隙磁感應強度的平方以及等效導磁面積成正比,導致了在較大驅動電流和較小氣隙的情況下,電磁力隨氣隙減小反而變小。
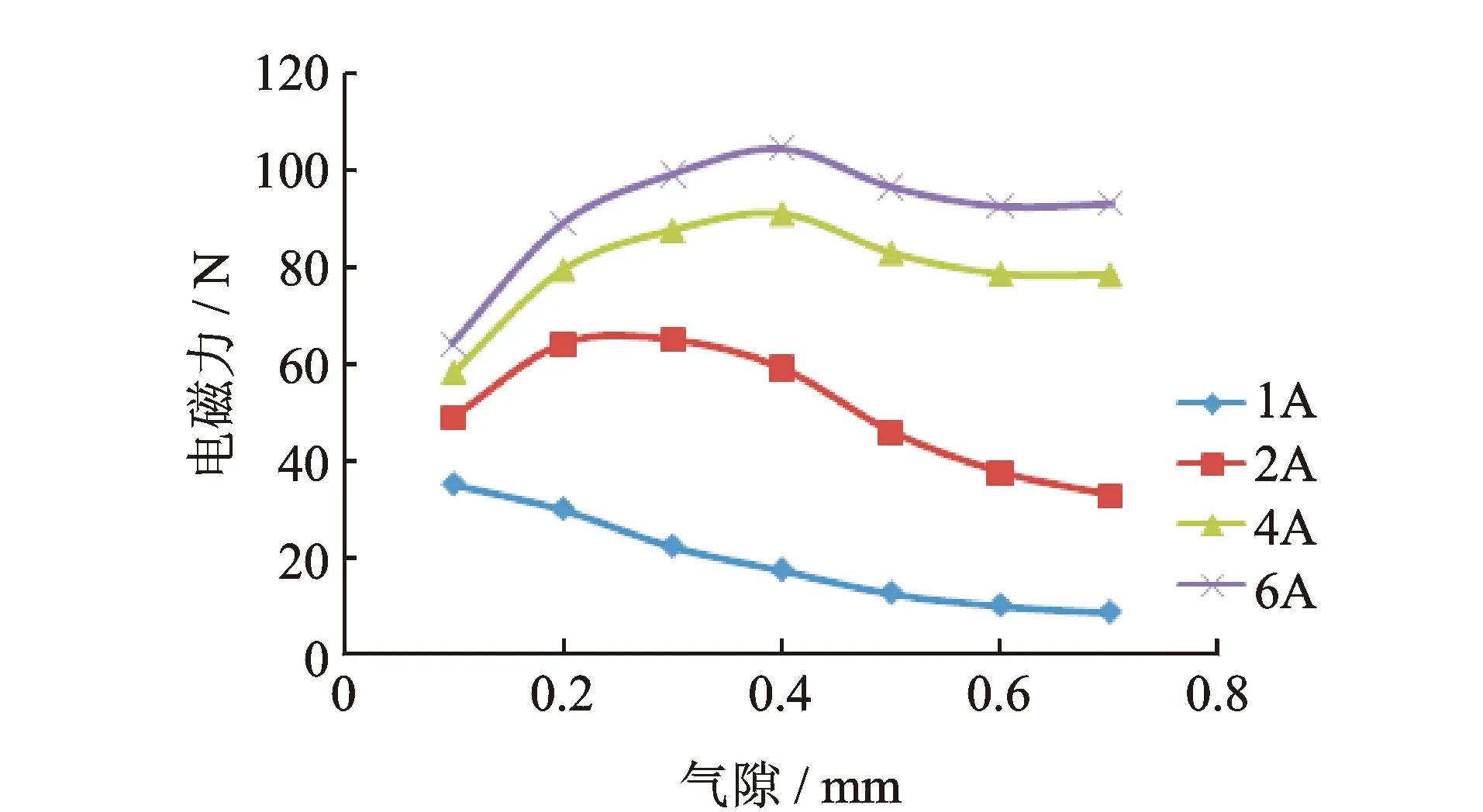
圖11 不同驅動電流下氣隙對電磁力的影響Fig.11 Influence of air gap on electromagnetic force under different drive current
4.5 銜鐵厚度
從圖12可以看出,在不同驅動電流下,增加銜鐵厚度均能使電磁力增大,且隨著驅動電流的增大,電磁力隨銜鐵厚度增大的幅度越來越大。這是因為增大銜鐵厚度會使鐵磁部分的磁阻減少,導致整個磁路的磁通量增加,作動器電磁力增大。同時,銜鐵厚度的增加會引起銜鐵上齒的工作表面直徑變大,而銜鐵上齒的工作表面直徑近似與電磁力成正比[14],導致電磁力增大。因此,在不同驅動電流下,隨著銜鐵厚度增加,電磁力都呈現增大的趨勢。增加銜鐵厚度,還會使磁通沿銜鐵軸向的流通面積增加,導致銜鐵部分的磁感應強度相對降低,磁場就不會在銜鐵部分出現過早飽和,所以驅動電流越大,增大銜鐵厚度引起的電磁力增大越明顯。
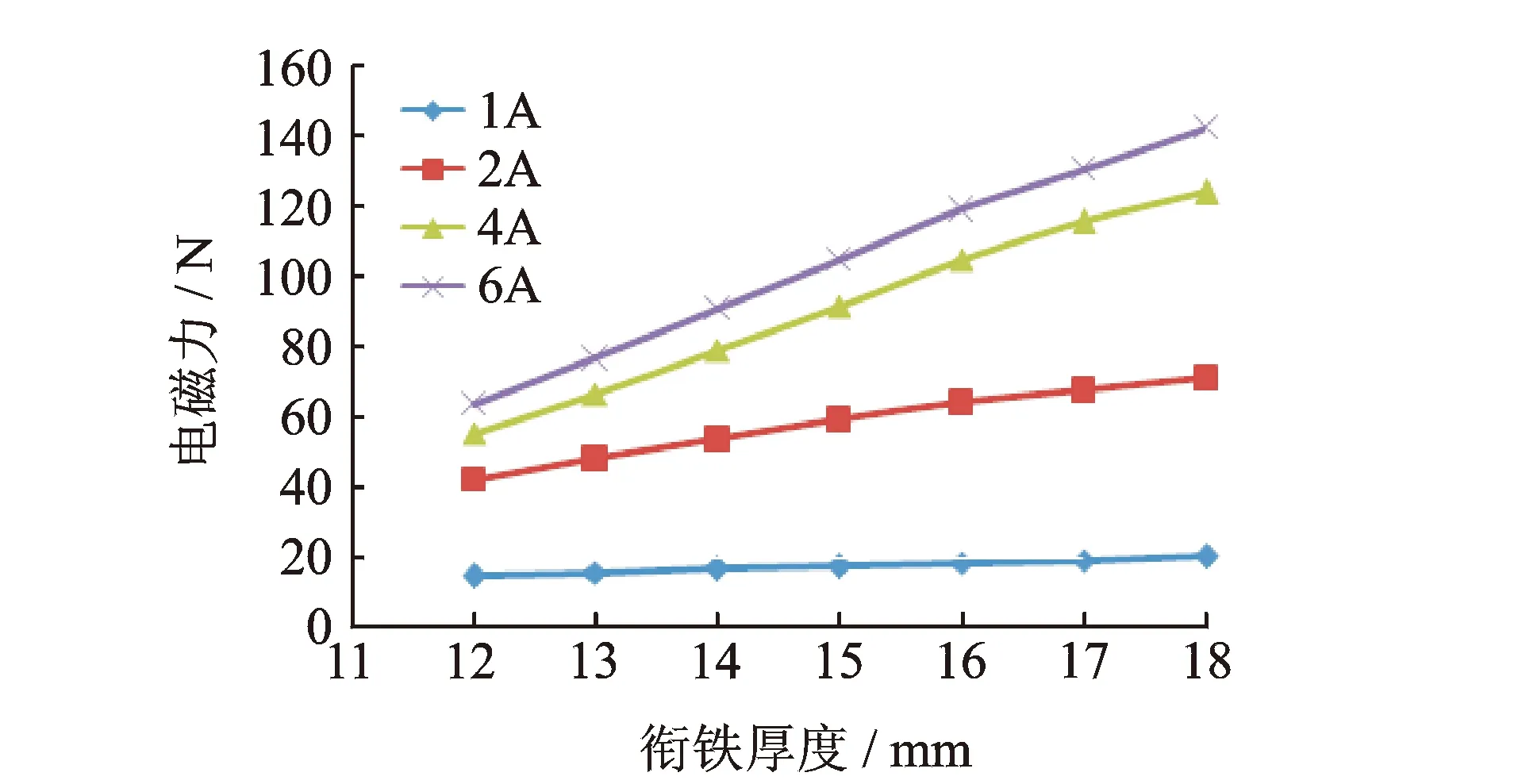
圖12 銜鐵厚度對電磁力的影響Fig.12 Influence of armature thickness on electromagnetic force under different drive current
4.6 軛鐵厚度
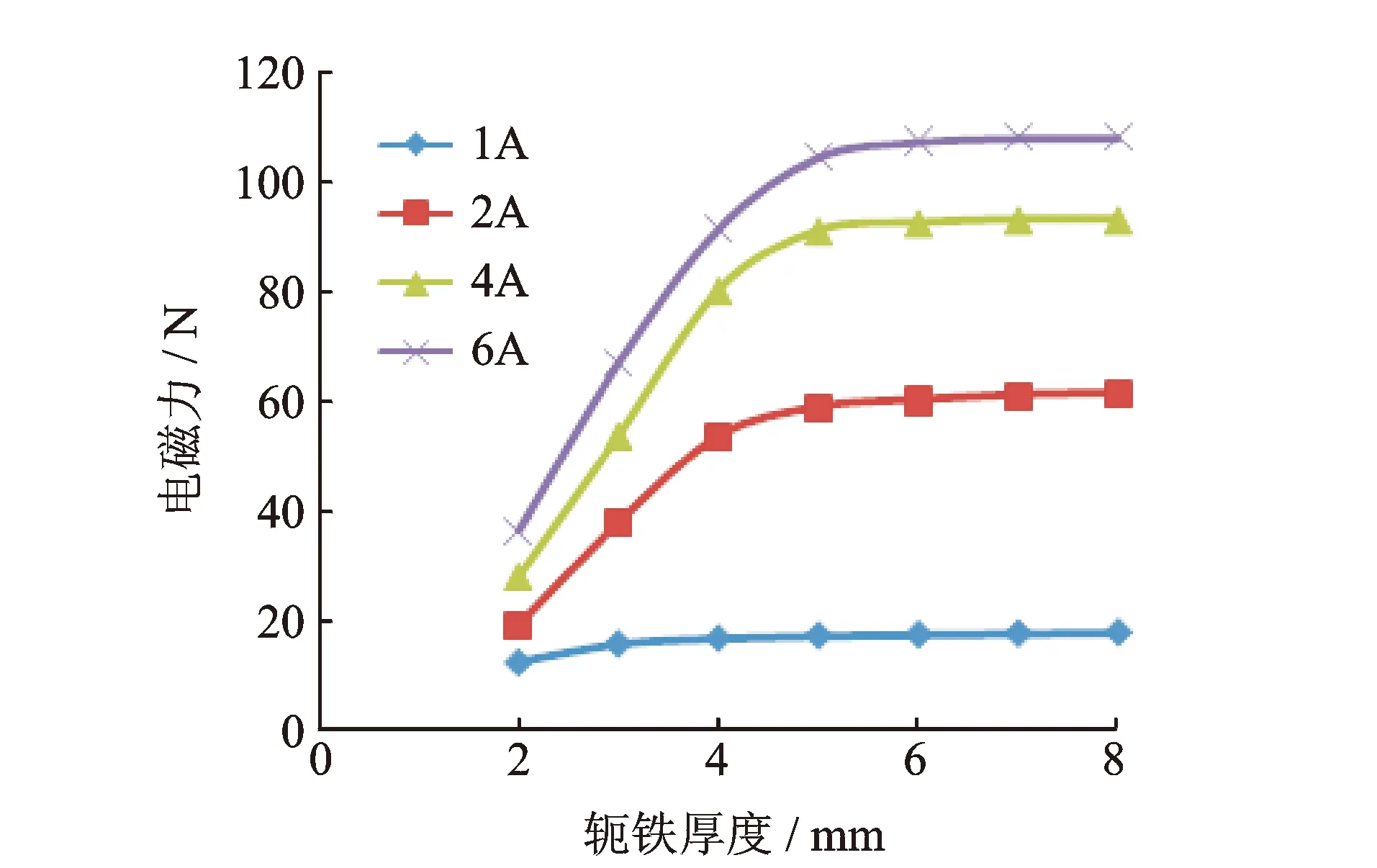
圖13 軛鐵厚度對電磁力的影響Fig.13 Influence of yoke thickness on electromagnetic force under different drive current
從圖13看出,當軛鐵厚度從2 mm增加到5 mm左右時,電磁力顯著增加;當軛鐵厚度超過5 mm后,繼續增加軛鐵厚度,電磁力基本不再增大。這主要是由于增大軛鐵厚度可以減小軛鐵磁阻,從而使電磁力增大,這種增大作用在一定范圍內比較明顯,超過一定范圍后就幾乎不起作用了,反而增大了作動器的尺寸,浪費了材料。同時,在電磁力隨軛鐵厚度增大而顯著增加的區段,隨驅動電流增大,電磁力增大的幅度也有所增加。可見,軛鐵厚度增加使電磁力增大的影響在大驅動電流時更明顯一些。
5 結 論
1) 利用ANSYS軟件建立了新型電磁作動器仿真計算模型,對加工好的樣機電磁力進行了試驗測量。結果表明,仿真計算值與試驗數據能夠很好吻合,最大誤差僅為11.6%,證明了所建立仿真模型的準確性,為進一步研究提供了有力工具。
2) 利用試驗驗證的仿真模型分析了齒高、線圈匝數、齒數、氣隙、銜鐵厚度和軛鐵厚度等參數對電磁力的影響規律:a.在較大驅動電流下,電磁力隨齒高增大先增大后減小,在小驅動電流下,電磁力呈現逐漸增大的趨勢;b.在不同驅動電流下,電磁力隨線圈匝數增多均呈現增大趨勢;c.在小驅動電流下,電磁力隨齒數增多而增大,在中等驅動電流下,電磁力隨齒數增多先增大后減小,在大驅動電流下,電磁力隨齒數增多而減小;d.在小驅動電流下,電磁力隨氣隙減小而增大,在較大驅動電流下,電磁力隨氣隙減小先增大后減小;e.在不同驅動電流下,電磁力隨銜鐵厚度增加均呈現增大趨勢,且驅動電流越大,電磁力增大越明顯;f.在不同驅動電流下,軛鐵厚度在一定范圍內增大時,電磁力明顯增大,超過這一范圍后電磁力基本不再增加。
[1] 何琳,徐偉.艦船隔振裝置技術及其進展[J].聲學學報,2013,38(2):128-136.
He Lin,Xu Wei.Naval vessel machinery mounting technology and its recent advances[J].Acta Acustica,2013,38(2):128-136.(in Chinese)
[2] Karnopp D,Crosby M J,Harwood R A.Vibration control using semi-active force generators[J].Journal of Engineering for Industry, 1974,96(2):619-626.
[3] Guglielmino E,Edge K A.A controlled friction damper for vehicle applications [J].Control Engineering Practice,2004,12(4):431-443.
[4] Suda Y,Shiiba T,Hio K,et al.Study on electromagnetic damper for automobiles with nonlinear damping force characteristics (road test and theoretical analysis)[J].Vehicle System Dynamics ,2004,41(S):637-646.
[5] Carlson J D,Jolly M R.MR fluid elastomer and foam devices[J].Mechatronics,2000,10(2):555-569.
[6] Jolly M R,Bender J W,Carlson J D.Properties and applications of commercial magnetorheological fluids[J].Journal of Intelligent Material Systems and Structures,1999,10(1):5-13.
[7] 李銳,杜鵬飛,徐文韜,等.基于無量綱分析的磁流變隔振器阻尼參數優化[J].振動、測試與診斷,2014,34(1):39-45.
Li Rui,Du Pengfei,Xu Wentao,et al.Damping parameter optimization of magneto-rheological isolator via dimensionless analysis [J].Journal of Vibration,Measurement &Diagnosis,2014,34(1):39-45.(in Chinese)
[8] Chen Yong,Zimcik D G,Wickramasinghe V K,et al.Research of an active tunable vibration absorber for helicopter vibration control[J].Chinese Journal of Aeronautics,2003,16(4):203-211.
[9] 周卓亮.可變剛度隔振器研究[D].哈爾濱:哈爾濱工程大學,2006.
[10]石勇,劉友,袁志國.一種柴油機半主動電磁作動器的設計及特性仿真[J].機械設計與研究,2010,26(1):97-100.
Shi Yong,Liu You,Yuan Zhiguo.A semi-active electromagnetic actuator and its characteristics simulation for vibration isolation of diesel engine[J].Machine Design and Research,2010,26(1):97-100.(in Chinese)
[11]王澤忠.簡明電磁場數值計算[M].北京:機械工業出版社,2011:106-122.
[12]項海籌,邵敏.電磁式固有頻率可控動力消振器的研究[J].中國機械工程,1992,3(1):14-16.
Xiang Haichou,Shao Min.Research on electromagnetic natural frequency controllable dynamic vibration absorber[J].China Mechanical Engineering,1992,3(1):14-16.(in Chinese)
[13]官瑞楊,魏新勞,聶洪巖.鐵心電抗器氣隙等效導磁面積計算[J].哈爾濱理工大學學報,2014,19(4):6-11.
Guan Ruiyang,Wei Xinlao,Nie Hongyan.The calculation of air gap equivalent cross-sectional area in core reactor[J].Journal of Harbin University of Science and Technology,2014,19(4):6-11.(in Chinese)
[14]Liu Xueguang,Feng Xiaoxiao,Shi Ye,et al.Development of a semi-active electromagnetic vibration absorber and its experimental study[J].Journal of Vibration and Acoustics,2013,135(5):0510151-0510159.

10.16450/j.cnki.issn.1004-6801.2017.04.015
* 國家自然科學基金資助項目(51475100);工業和信息化部高技術船舶資助項目(G034813010)
2015-10-21;
2016-02-29
TB535; TH703.63
寧一高,男,1990年4月生,碩士生。主要研究方向為電磁執行器的優化。
E-mail:ningyigao@hrbeu.edu.cn
石勇,男,1973年1月生,博士、副教授、碩士生導師。主要研究方向為柴油機電控與仿真。
E-mail:sy.heu@hrbeu.edu.cn
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
