智能校園巡邏安保機器人設計
2017-09-15 13:02:53薛金言
無線互聯科技 2017年16期
薛金言,張 斌,武 瀚
(哈爾濱理工大學 機械動力工程學院,黑龍江 哈爾濱 150000)
智能校園巡邏安保機器人設計
薛金言,張 斌,武 瀚
(哈爾濱理工大學 機械動力工程學院,黑龍江 哈爾濱 150000)
新型功能的智能機器人是當下研究的熱點之一,而智能車是輪式機器人的一種,在實際生活和科技軍事領域都發揮著不可替代的作用,因其可以適應復雜多變的環境,執行一些人類無法執行的任務。結合常被社會關注的校園安全問題,文章設計了校園安保機器人小車,主要概括了國內外機器人領域的現狀、所存在的主要問題以及發展方向;另外,對智能安保機器人的基本結構及功能進行了闡述。
智能車;安保;機器人
隨著社會經濟的發展,超級商場、機場、車站、會展中心及物流倉庫等大型人流、物流場所的規模和數量不斷擴大,大中城市的高層、高檔商用日益增多,其保安自動化需求日趨迫切。巡邏機器人是一個集環境感知、路線規劃、動態決策、行為控制以及報警裝置于一體的多功能綜合系統,采用巡邏機器人實行定時、定點監控巡邏或不間斷流動巡邏將是目前一種可行的解決方案[1]。而機器人在環境中能夠準確地定位以及躲避可能存在的障礙物,是機器人完成巡邏任務的前提和基礎。將機器人用于保安工作,具有廣闊的應用前景,近年來已受到國內外的重視,成為服務機器人的一個新研究方向。
目前,在校園中比較通用的辦法是,校園物業招聘保安,成立夜間巡邏隊。實踐證明,這種方法雖然能起到一定的作用,但缺陷也是非常明顯的。首先,安保行業缺口大。據資料顯示,安保從業人員不足需求量的80%,需求缺口不少于112萬人,并且安保行業的流動性非常高。其次,從業人員的素質偏低。由人構成的夜間巡邏隊伍不能保證不遺留死角,且人在深夜容易瞌睡,保安人員會發生脫崗漏崗睡崗現象。再次,保安“老齡化”趨勢嚴重。校園保安即使發現有可疑人員也無法迅速通知監控中心,安保行業市場面臨的困惑亟待解決。而隨著人工智能安保機器人的出現,安保機器人作為智能安防中的重要一員,可代替更多的勞動力,成為產業升級或變革的重要工具,傳統商業的安防模式將逐漸進入機器智能化時代[2]。鑒于此,我們設計制作了智能巡邏校園安保機器人。
1 智能校園巡邏安保機器人整體結構的設計
1.1 智能校園巡邏安保機器人整體結構
智能校園巡邏安保機器人的基本結構是把一系列傳感器以及檢測裝置與圖像傳輸裝置安裝在基于麥克納母輪的移動平臺上,可以實現自由靈活的移動。綜合上述的裝置和平臺,實現了巡邏機器人的全方位的智能巡邏與安保。
整機是由基于麥克納木輪的底盤系統、底盤控制系統、視覺避障系統、圖像采集及傳輸系統、檢測與報警系統組成。安保機器人的巡邏功能分自動巡邏和遠程遙控巡邏兩種模式[3]。在自動模式下,機器人可根據環境信息,自動構建地圖及實時定位,并按預定路線、預定時間執行巡邏任務。在巡邏過程中機器人若自身電力不足,可自行尋找充電樁對接充電。遠程模式則是通過遠程遙控器操作機器人巡邏。其中麥克納母輪底盤系統和底盤控制系統用來保證機器人的靈活移動與避障,可以根據場地的具體情況,設定規劃好一條路徑,也可以通過視覺避障系統發出的指令進行移動。視覺避障系統用來保證機器人的避障與行進。當視覺避障系統發現接近障礙時,發出信號給底盤控制系統,使其做出判斷,并做出正確的路徑規劃,繼續前進。圖像采集及傳輸系統用來進行實時的圖像采集與回傳,其具有夜視功能的高清數字攝像頭及各種傳感器,可實時視頻監控、錄像存儲、歷史回放。同時該機器人還可以通過前后左右4個移動高清數字攝像頭,綜合各個傳感器信息,將檢測到的圖像回傳給控制系統與控制室,控制系統做出判斷后,若發現異常情況,會立即發送到檢測與報警系統,檢測與報警系統用來實時檢測周邊環境的與發出報警,當其發現可疑的氣體或圖像后,立即拉響警報并且給主控室發出報警,提醒主人當前環境發生異常情況。
1.2 視覺避障系統的設計
視覺避障部分采用超聲波與光電管結合,超聲波測距部分使用TR40超聲波探頭,而紅外檢測則采用了L5IR3-30紅外發射二極管和IRM38BL-2一體化接收頭,其具有衰減低、可靠性高等特點[4]。在利用超聲波測距的同時,利用紅外線檢測彌補超聲波檢測的角度精度,因為超聲波發射頭的發射角度較大,而紅外線發射頭的發射角度相對較小,將兩者結合可以更準確地檢測出前方物體的具體位置和距離,甚至可以掃描出前面物體的大體輪廓。在機器人進入自動值守模式時,兩側的熱釋紅外傳感器開始工作,當有人在傳感器警戒范圍內走動時,由人體發出的微量紅外線通過菲涅爾透鏡聚焦后,在熱釋電人體紅外線傳感器的內部敏感元件上引起溫度變化而產生極化,從而在傳感器的外接電阻兩端輸出傳感信號。此傳感信號相當微弱,經二級放大、雙向鑒幅、延時處理后,再送往單片機處理,從而實現攝像頭自動檢測拍攝移動人體的功能[5]。
1.3 可移動底盤設計
可移動底盤設計能夠使車具有前行、橫移、斜行、旋轉及其組合等運動的能力。使用鋁型材去制作底盤,因為鋁型材結構特殊方便后期的調整,而且鋁型材的質量比較輕,結構強度高,并且鋁型材符合國家標準,使用更加方便。又因為是小型機器人,所以對機器人的質量有限定,使用鋁型材作為機器人的底盤,剛好解決了機器人底盤笨重,對電機負載較大的難點,同時鋁型材有專門的連接件,有很少的打孔和很少的折彎,加工簡單,裝配方便,減少了對鋁型材的二次加工,所以極大地方便了機器人的組裝,同時也大大減輕了后期調整的負擔,能夠使車具有前行、橫移、斜行、旋轉及其組合等運動的能力。
智能校園巡邏安保機器人作為一種新的一種全向移動的新型機器人,其基本結構是通過把一系列的傳感器與檢測裝置安裝在底盤上面,使其完成相應的功能。機器人的底盤是保證機器人移動的核心,所以在設計的時候,應該考慮到其靈活性,一般的底盤都比較笨重,靈活性比較差,或者運動特性不好,不能滿足在校園環境中使用的條件,而且不能在一些狹小的環境中移動,會對機器人的功能起到一定的限制。所以在下文中我們對機器人的底盤進行詳細的設計分析。
2 底盤可行性方案的設計與比較
2.1 方案一
如圖1所示,三角全向輪系的路徑調試較好,耐碰撞性能一般,有著較好的強度,且機構布置方便,但在制作方面有一定難度且移動性能較差,調試過程中不易實現。
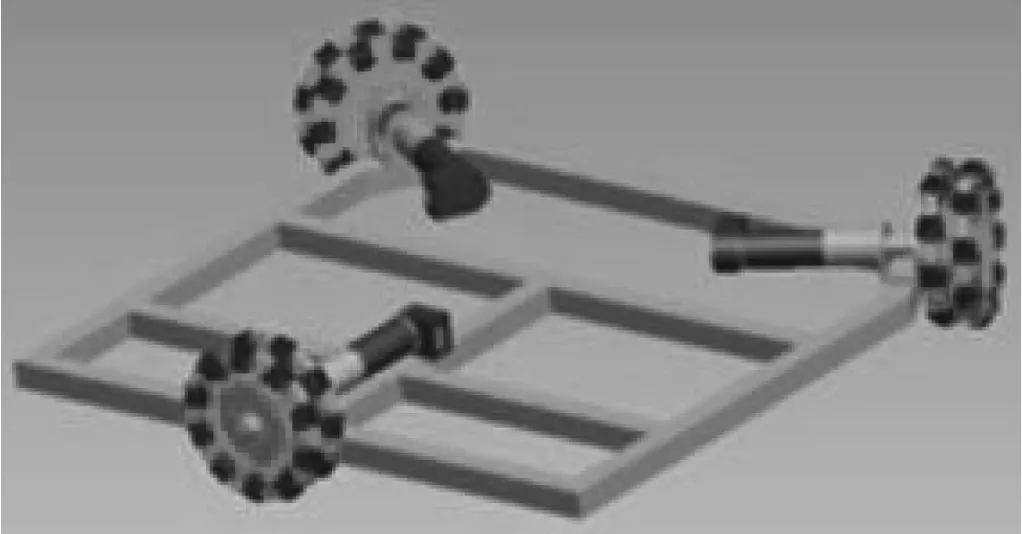
圖1 三輪全向輪系
2.2 方案二
如圖2所示,差速輪系的路徑調試一般,有著較好的耐碰撞性和強度,制作工藝簡單,但在機構布置方面有一定難度。
2.3 方案三
如圖3所示,麥克納姆輪系的路徑調試效果較好,有著較好的耐碰撞性和強度,制作比較困難,但在機構布置方面非常簡單。機器人的底盤使用麥克納姆輪,因為使用麥克納姆輪是基于一個有許多位于機輪周邊輪軸的中心輪的原理上,這些成角度的周邊輪軸把一部分的機輪轉向力轉化到一個機輪法向力上面。依靠各自機輪的方向和速度,這些力的最終合成在任何要求的方向上產生一個合力向量,從而保證了這個平臺在最終的合力向量的方向上能自由地移動,而不改變機輪自身的方向。在其輪緣上斜向分布著許多小滾子,故輪子可以橫向滑移[6]。小滾子的母線很特殊,當輪子繞著固定的輪心軸轉動時,各個小滾子的包絡線為圓柱面,所以該輪能夠連續地向前滾動。麥克納姆輪結構緊湊,運動靈活,是很成功的一種全方位輪。有4個這種新型輪子進行組合,可以更靈活方便地實現全方位移動功能[7]。
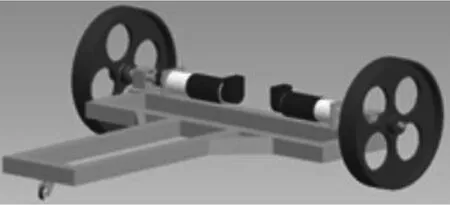
圖2 差速輪系

圖3 基于麥克納姆輪的四輪全向輪系
3 結語
通過對3種底盤的對比分析,采用麥克納姆輪有著較大的優勢。機器人安裝了基于麥克納姆輪的底盤,所以克服了大多數工業機器人不可以移動的問題,該機器人可以自由行走,運動靈活,操作方便,同時將多種傳感器安裝在可以動的底盤上,大大提高了機器人的靈活性。此外該小型可移動智能安保巡邏機器人非常適合應用在空間有限、狹窄的環境,在提高工作效率、降低人力成本方面具有明顯的效果。
該小型可移動多用途機器人的體積小,且具有一定的智慧。因此其訓練和調試工作將變得更加簡單,同時操作控制將變得更加簡潔容易上手,因此其性價比將進一步提升[8]。所以該機器人的使用范圍將更加廣泛,其不僅可以在校園環境中發揮自如,而且適用于商場、大型樓宇中,從而有力地解決了安保人員雇傭難、勞動力短缺的問題。
[1]王田苗,劉進長.機器人技術主題發展戰略的若干思考[J].中國制造業信息化,2003(1):31-35.
[2]王握文.世界機器人發展歷程[J].國防科技,2001(1):70-75.
[3]章小兵,宋愛國.地面移動機器人研究現狀及發展趨勢[J].機器人技術與應用,2005(2):19-23.
[4]徐國華,譚民.移動機器人的發展現狀及其趨勢[J].機器人技術與用,2001(3):7-14.
[5]張明路,丁承君,段萍.移動機器人的研究現狀與趨勢[J].河北工業大學學報,2004 (2):110-115.
[6]蔣新松.機器人與工業自動化[M].石家莊:河北教育出版社,2003.
[7]王灝,毛宗源.機器人的智慧控制方法[M].北京:國防工業出版社,2002.
[8]江浩,樊炳輝.新型移動機器人的結構設計[J].應用科技,2000(8):3-5.
Design of intelligent campus patrol security robot
Xue Jinyan, Zhang Bin, Wu Han
(Mechanical Engineering School of Harbin University of Science and Technology, Harbin 150000, China)
The intelligent robot of the new function is one of the hotspots of the present research, and the intelligent vehicle is a kind of wheeled robot, which plays an irreplaceable role in the real life and the military fi eld of science and technology because it can adapt to the complicated environment, perform some tasks that humans can not. Combined with the campus security issues that are often of concern to society, we hereby designed a campus security robot car. This paper mainly elaborates the current situation, the main problems and the development direction of the robot at home and abroad. In addition, the basic structure and function of intelligent security robot are expounded.
intelligent car; security; robot
薛金言(1995— ),男,甘肅武威人,本科;研究方向:機械設計。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
琴童(2017年3期)2017-04-05 14:49:04
小天使·二年級語數英綜合(2017年3期)2017-04-01 17:17:48
海峽科技與產業(2016年3期)2016-05-17 04:32:12
