全球衛星導航系統用于橋梁健康監測數據處理分析
2017-09-15 07:50:24田保慧張擎天
時代農機 2017年7期
關鍵詞:橋梁
田保慧,張擎天,張 建
(1.河南省交通技術學院,河南 鄭州 450016;2.河南北斗衛星導航平臺有限公司,河南 鄭州 450003)
全球衛星導航系統用于橋梁健康監測數據處理分析
田保慧1,張擎天2,張 建2
(1.河南省交通技術學院,河南 鄭州 450016;2.河南北斗衛星導航平臺有限公司,河南 鄭州 450003)
作為橋梁健康監測的一種重要手段,全球衛星導航定位系統具有低通視要求、高自動化、短周期等明顯的技術優點,可以滿足實時、全天候的橋梁健康監測要求,使其成為該領域應用發展的一個熱點。文章通過對比各種解算方式下的數據,旨在分析出全球衛星導航定位系統用于橋梁健康監測的不同解算模式下數據的精度與誤差,為推動全球衛星導航定位系統在橋梁健康監測領域中的應用和探索略盡綿力。
橋梁;精度;全球衛星導航定位系統;健康監測;參考站
衛星導航是指采用分布太空的多顆導航衛星對覆蓋區域內的用戶進行導航定位的技術。全球衛星定位系統(以下簡稱GNSS)是指利用有多個覆蓋全球的衛星組成的衛星導航系統提供的位置、速度及時間信息,對各種目標進行定位、導航及監管,目前常用的GNSS測量解算模式主要包括:靜態、快速靜態和動態模式三種。在大地測量、海洋測量、工程測量、勘探測量及各種類型的變形監測等領域,GNSS測量已被廣泛深入使用。隨著生產力的發展,作為交通咽喉的橋梁變得跨度大、結構柔,但人們對大型復雜結構認識不足、不定時或不可抗的外在因素(超負荷運營、超限服役、腐蝕、疲勞、撞擊、爆炸)影響。為確保橋梁的安全運營,日常需要對橋梁進行健康監測。橋梁的健康監測是指對橋梁的主要位置和關鍵部位實施不間斷的實時測量,來觀察橋梁的承載、耐久等各項生命體征在外界環境因素(風、溫度、氣候等)和過往車輛與行人作用下的變化情況。目前,廣泛應用于變形監測領域的全球衛星導航定位系統監測方法由于具有無需通視,全天候運行受氣候條件影響小,可以進行同步觀測,觀測時間短,定位的結果沒有誤差積累,并可以快速、簡便地獲取監測位置的三維空間坐標,逐步成為橋梁健康監測的一個重要發展方向。因此,建立基于GNSS技術的橋梁健康監測系統從技術來講是切實可行的。文章通過一個基于北斗衛星導航系統的橋梁健康監測項目,結合GNSS解算的原理和實踐數據的分析討論,進一步分析何種解算模式更適合橋梁健康監測系統的建設。
在花園口黃河大橋開展的基于北斗的橋梁健康與交通量運營的項目中,采用了基于北斗(BDS)的GNSS衛星定位方式來監測大橋關鍵部位的變形情況。其中,基準站是建立在管理處機房樓頂開闊處的屋頂站,監測點布設在大橋105跨的橋墩處,高出橋面40cm。文章通過分析采用各種監測解算方式下的監測結果,分析出橋梁GNSS監測的數據解算方式。
1 全球衛星導航定位系統橋梁健康監測分析
1.1 全球衛星導航定位系統橋梁健康監測的原理
全球衛星導航定位系統橋梁健康的基本工作原理是,在橋梁關鍵位置布設監測站一處或若干處,在橋梁周圍地形穩固空間寬闊的位置建設一座或以上數量的基準站,進行同步觀測并解算出各監測站處的三維坐標,得出大橋的某一位置在固定時刻的三維空間坐標,進而由此評估橋梁的健康狀態和各種運行情況下位移變化的規律。
1.2 全球衛星導航定位系統定位數據的解算
載波相位觀測值是高精度GNSS測量解算結果的精度最高的定位方式。靜態定位和RTK動態定位兩種測量模式都是采用載波相位觀測值解算的定位技術,它們能夠提供測量位置高精度的三維空間坐標。
(1)靜態定位解算模式。采用載波相位觀測值的相對定位模式的靜態解算是目前精度最高的,該模式認為整個觀測過程中接收機天線的位置是靜止不動的,通過衛星觀測數據的變化求解位置信息。具體是取得放置在一條或數條基線的兩個端點基準站和參考站同一時段觀測的衛星數據。通過基線解算和各種誤差方程求取測站點間的基線向量,確定每個測站點在指定坐標系下的三維坐標,一般需要觀測2個小時以上,解算精度為mm級,整個數據處理流程分為前期處理、基線解算、網平差、坐標變換等幾個階段。
(2)動態定位解算模式。Real-time Kinematic(簡稱RTK)定位技術是目前廣泛使用的實時動態衛星定位技術,通過基準站的配合,流動站能夠實時返回觀測點厘米級精度的待測點的三維坐標。在RTK定位模式下,作為基準站點的三維坐標是事先獲得的,流動站通過基準站發來的觀測值改正數不斷修正其自身的觀測值快速返回測量結果。基準站通過電臺、無線網絡等各種形式將流動站所需信息發送至流動站。流動站不僅接收基準站發送過來的數據,其自身還接收衛星發送的數據,然后將兩種來源的數據組成差分觀測值進行實時解算,一秒內給出待測位置的觀測結果。由于通信線路的限制,基準站和流動站間距通常在數公里內,因此可以認為兩站間的各種誤差來源因素存在很強的一致性,通過組成差分觀測值可以消除一定量的相關誤差,保證觀測結果的精度。
1.3 靜態定位模式
目前,各地開展的基于GPS/BDS橋梁健康監測系統主要采用這種解算方式處理觀測數據,得出監測點準確位置。采用載波相位相對定位的靜態模式可以達到毫米級的解算精度,有靜態、準(快速)靜態定位兩種解算方式。常規靜態測量需要觀測2個小時以上,不適用于橋梁監測實時監測的設計要求,而快速定位通過快速獲取整周模糊度可以短時間內解算出監測結果,花園口黃河大橋橋梁健康監測項目采用了后者進行監測數據解算方式。
快速靜態定位需要設計數據處理軟件處理衛星接收機觀測到的原始星歷、觀測數據。為了保證解算結果的高精度,設計了滿足以下條件的GNSS數據解算軟件:
(1)刪除整個觀測過程中觀測時間過短的衛星觀測數據,不讓該衛星觀測數據參與相關解算過程,保證基線解算精度。
(2)關于周跳問題,可以通過刪除某顆衛星周跳嚴重時間段的方法和刪除周跳嚴重衛星觀測值兩種模式對比來提高基線解算結果的精度。
(3)對于殘差較大的觀測值,直接剔除不讓其參與基線解算。
(4)根據觀測的情況生成模型,改正對流層和電離層對衛星信號傳播的延遲,提高解算精度。
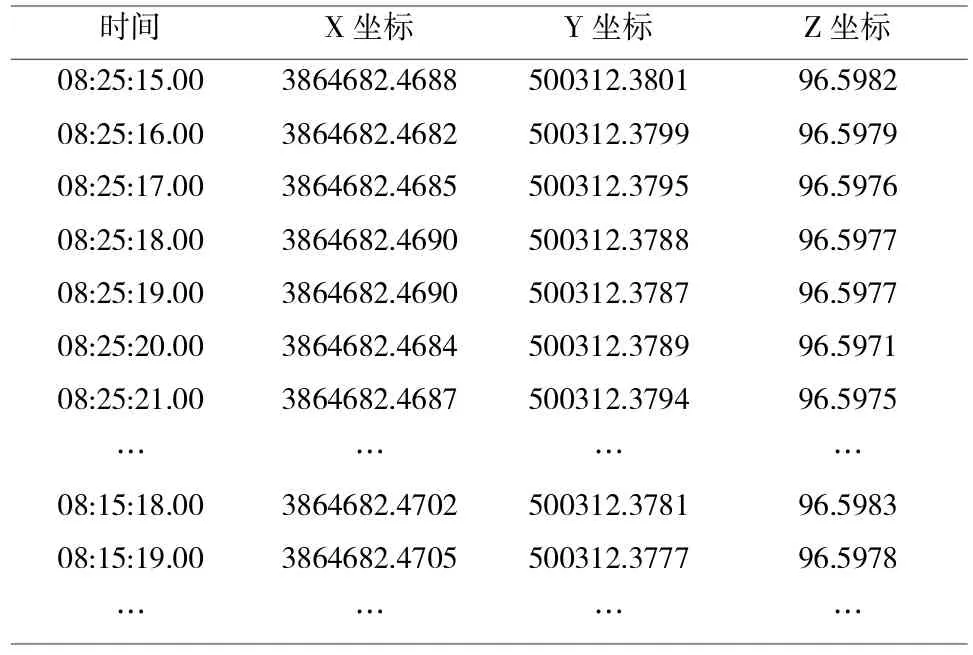
表1 截取了該軟件部分的監測數據結果
通過表1可以看出,監測結果穩定性高。分析數天的觀測數據,可以得知監測站點坐標極限差值整體不大于1cm。鑒于監測點布設位置為橋梁的墩柱位置,為不可能頻繁出現厘米級的震顫、變形的部位,所以可以認定監測數據結果符合橋梁監測點位置的實際情況。再連續觀測數天后,統計分析所有天觀測的解算數據,通過數學計算得出數據以一個固定坐標為中心形成正態分布,從而說明了監測處坐標細微變化的根源系GNSS測量過程中的偶然誤差。通過以上分析,可以看出快速靜態定位可以用于橋梁的健康監測,并能夠獲取準確、可靠的監測結果。
1.4 RTK動態定位模式
為了探索RTK動態定位的解算模式能否用于變形監測領域,通過更改監測站接收機輸出設置,設置監測站接收機的解算模式為RTK觀測模式。在RTK模式下,分別進行了接入自建基準站和接入“河南北斗地基增強系統”兩種基站模式進行監測。開展了一段時間的監測后,統計分析各種方式的相關數據。截取部分的觀測值數據,如表2所示。
通過表2數據可以看出數據值浮動很大,通過分析對比所有監測天數的監測解算數據,得出以下4點結論:①通過RTK模式解算的數據其結果的穩定性差,結果的差異無明顯規律;②但是在一些特殊的情景下其數據解算結果又趨于穩定且靠攏靜態模式下解算的結果值;③自建基準和北斗地基增強系統兩種模式,在觀測過程中都出現了幾次衛星失鎖導致接收機重新初始化的現象,但是北斗地基增強系統模式下出現的次數要少一些;④同比測試下對比自建基站和地基增強系統站兩種模式下的數據,接入地基增強系統的觀測結果優異于基準站模式的觀測結果。
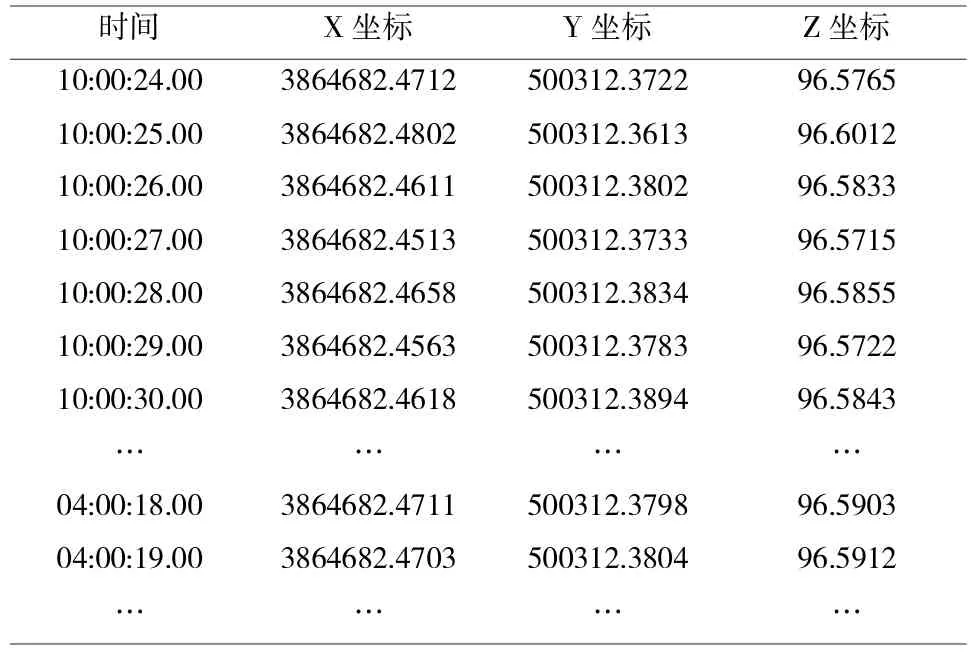
表2 截取部分的觀測值數據
通過對幾天的觀測數據進行統計分析可得出結論:RTK動態解算模式的觀測結果的分布無法用正態分布表示,明顯存在一定的系統誤差。因而雖然目前動態RTK模式可以達到1cm+1ppm的測量精度,但是由于橋梁變形監測的特殊要求,尚不能作為GNSS橋梁變形監測的數據解算手段。
1.5 兩種解算模式的對比分析
GNSS測量結果的主要誤差有以下四個來源:①導航衛星系統的衛星鐘差和衛星軌道偏差等相關誤差;②電流層、對流程、多路徑效應對衛星信號傳播影響產生的誤差;③接收機設備的鐘差及天線相位中心、觀測誤差、整周未知數等因素形成的誤差;④其它外界因素。其中各種硬件設備的鐘差如衛星鐘差和接收機鐘差,對兩種模式觀測結果的影響可以認定為一致的,而電流層、對流層、多路徑的誤差影響忽略觀測時段不同的影響基本也應一致。造成兩種解算模式不同的原因應在于外界因素影響以及其對監測點接收機天線相位中心和觀測時段長短對整周模糊度的影響。
造成RTK監測結果難以穩定固定值1cm范圍內的主要誤差來源為:①由于參考站布設在橋面之上,通行車輛帶動的空氣使儀器發生輕微振動,RTK模式下振動使天線相位中心無法固定一個點,從而使接收機解算出不同的固定解。②由于黃河大橋的高度,導致橋面以上的高度風力大于普通路面高度的風力,對儀器的穩定造成影響,該種影響和上一個影響相同。③天空衛星分布的影響,天氣惡劣情況下會導致無法正常差分解算,從而儀器要重新進行初始化,影響了觀測的連續性。④由于RTK模式下,基準站需要向監測站發送差分數據作為監測點結算的一部分,所以基準站的接收機和發送數據的精度對移動站的解算有一定影響。
而選擇河南北斗地基增強系統(連續運行參考站系統)的網絡RTK模式優異于自建基站的普通RTK模式,其主要原因在于:①網絡RTK模式下,虛擬基站和監測站之間的基線距離可以更短,從而消除衛星系統相關的誤差更有效明顯;②在傳播誤差方面,網絡RTK可以以整個參考系統的電離層、對流層模型修正監測站的數據,而普通RTK只能通過基準站和監測站兩個站建立模型,所以相對而言,前者的模型更復雜更準確有效;③在整周未知數方面,眾所周知,網絡RTK的解算周期更短,能夠更快得到固定解,從而更有優勢;④網型優勢,網絡RTK組成的網絡形狀更加復雜,能夠利用單基線、多基線等來解算基線,從而能通過軟件來處理得出更優的情況。
2 結論
通過對黃河公路大橋橋梁健康監測項目的監測數據進行分析可知,雖然全球衛星導航定位技術在橋梁監測領域有很大的應用潛力,但由于其仍受一定外界因素的干擾和各種解算模式的局限性,導致其在變形監測領域內的價值受到一定的影響。在監測過程中,如何選擇數據的處理對整個監測結果起著至關重要的作用。靜態相對定位技術雖然有較高的精度,但是其觀測時間較長,所以無法應用于對觀測時段要求高的項目;RTK模式不論是網絡型RTK還是普通模式的RTK,由于受到其誤差來源與自身精度的影響,難以適用于觀測環境差精度要求高的項目;而快速定位模式,可以較快的解算出整周模糊度并具有很高的解算精度,可以作為橋梁GNSS監測的數據處理方式。
綜上所述,可以得出如下結論:①全球衛星導航定位系統測量結果的精度受到天空中衛星分布姿態和衛星信號傳播的制約,可以通過使用三星八頻的高端接收機組合四大全球衛星導航定位系統的衛星,選取最優觀測結果進行組合解算消除部分誤差的影響。②RTK實時動態相對定位技術,雖然能夠方便快捷的得到1cm級的定位精度,但是由于易受外界因素如風力、溫度和大橋通行人車的不良影響,無法精確消除這類影響帶來的誤差,想通過RTK定位技術進行橋梁位移監測還有待各方面技術的發展。③全球衛星導航定位系統快速靜態定位技術配合先進的解算算法能夠在短時間內輸出達到毫米級的定位精度觀測值,其精度符合橋梁健康監測對觀測精度的要求,能作為橋梁位移測量的一種技術手段。④北斗地基增強系統作為基準站的網絡RTK模式一定程度上優異于自建基準站的普通RTK模式的數據精度,可以作為未來探索的一個方向。
[1]余加勇,邵旭東,晏班夫,等.基于全球導航衛星系統的橋梁健康監測方法的研究進展[J].中國公路學報,2016,(4).
[2]王文貫,陸海波.單、雙頻GPS數據聯合處理基線分析[J].水利規劃與設計,2010,(4).
[3]石金峰,李新慧,楊培章.RTK技術及其在控制測量中的應用[J].遼寧工程技術大學學報,2004,(6):737-739.
[4]張隨甲,周曉忠.GPS-RTK誤差來源及減弱誤差的實用方法[J].交通科技與經濟,2014,(2).
田保慧(1975-),河南商水人,碩士,副教授,主要從事智能交通研究工作。
猜你喜歡
工程與建設(2019年4期)2019-10-10 01:45:56
湖南教育·A版(2019年4期)2019-05-10 03:31:44
小學生學習指導(低年級)(2019年4期)2019-04-22 03:28:24
中國公路(2017年11期)2017-07-31 17:56:30
中國公路(2017年10期)2017-07-21 14:02:37
山東工業技術(2016年15期)2016-12-01 05:31:04
焊接(2016年8期)2016-02-27 13:05:15
中國工程咨詢(2016年9期)2016-02-13 03:12:36
城市道橋與防洪(2013年7期)2013-03-11 15:17:41
城市道橋與防洪(2013年5期)2013-03-11 15:16:32
