多維微振動模擬平臺理論建模與仿真研究
2017-09-16 05:58:03楊劍鋒黃創綿王遠航李小兵李鍇
裝備環境工程 2017年8期
楊劍鋒,黃創綿,王遠航,李小兵,李鍇
?
多維微振動模擬平臺理論建模與仿真研究
楊劍鋒1,2,3,黃創綿1,2,4,王遠航1,3,4,李小兵1,4,5,李鍇1,2,4
(1.工業和信息化部電子第五研究所,廣州 510610;2.廣東省電子信息產品可靠性與環境工程技術中心,廣州 510610;3.廣東省電子信息產品可靠性技術重點實驗室,廣州 510610;4.廣州電子信息產品可靠性與環境工程重點實驗室,廣州 510610;5.廣東省工業機器人可靠性工程實驗室,廣州 510610)
目的模擬空間飛行器上反作用產生的微振動。方法設計一種多維微振動模擬平臺,該模擬平臺可產生空間六維微振動加速度譜。首先分析各個驅動腿及負載質心處的速度與加速度間的關系,接著結合牛頓-歐拉方法與拉格朗日方程推導得到多維微振動模擬平臺的完整動力模型,最后利用多體系統軟件ADAMS與MATLAB/Simulink進行聯合仿真,以此聯合仿真技術來驗證理論模型的準確性。結果理論模型與仿真分析之間的最大誤差為2.84%。結論該理論模型準確可靠,可以作為動力學控制的理論基礎。
微振動;模擬平臺;Gough-Stewart平臺; 反作用飛輪
隨著空間技術的不斷進步,在空間領域開展的軍事及經濟競爭越來越激烈,對空間望遠鏡的要求也越來越高。具有大口徑、高分辨率的太空望遠鏡成為關注的重點,但航天飛行器上的擾動源,如反作用飛輪、力矩調姿陀螺、噴進系統、制冷劑、太陽帆板展開機構等產生的微振動會極大的降低光學系統的成像質量,嚴重時甚至會導致空間望遠鏡無法正常工作[1]。
在產生微振動的擾動源中,反作用飛輪產生的微振動被認為是最大擾源[2—3]。關于反作用飛輪的理論建模及特性分析,已有許多學者做過大量研究[2—4]。為了減小反作用飛輪產生的微振動對光學系統成像質量的影響,常用的措施是在光學載荷與反作用飛輪間安裝隔振器[5]。為了驗證隔振器的隔振效果,從而保證航天任務的成功完成,在火箭發射前要對航天產品進行充分的地面試驗論證。國外Kamesh[6—7]和國內周偉勇[8—9]等人通過比較反作用飛輪在有無采用隔振措施情況下產生的微振動大小來驗證隔振系統的隔振效果。一般而言,采用真實的反作用飛輪來進行地面試驗最能準確的測試隔振系統的隔振性能,但實際情況下,該項試驗的開展較為困難。主要需要考慮生產調度和正樣件損壞影響等問題,所以多數情況下采用正樣件的等效模擬件,但實際上模擬件與正樣件之間存在一定差距。因此文中開展多維微振動模擬平臺技術的研究,具有實際的工程意義。
并聯機構特別是Gough-Stewart平臺(Gough- Stewart Platform, GSP)因其優異的性能,在不同領域得到大量應用[10—11]。對于并聯機構而言,其動力學模型的準確與否直接關系著其控制性能的好壞[12—13]。在過去的幾十年里,關于GSP靜力學方面的研究較多,而關于其動力學方面的研究還是相對較少[14]。Oftadeh[15]等人利用拉格朗日方程建立了GSP的顯示動力學方程。Dasgupta[16]等人利用牛頓-歐拉方法得到GSP的完整動力學模型,且考慮了鉸鏈處的摩擦阻力。雖然關于GSP的研究較多,但將GSP用于空間多維微振動的模擬等方面的研究較少,文中即以此展開工作。
文中提出了一種基于GSP的多維微振動模擬平臺,該模擬平臺能準確復現多維加速度譜值。利用牛頓-歐拉方法結合拉格朗日方程建立了模擬平臺的完整動力學模型。該模型考慮了驅動支腿的質量、轉動慣量及上平臺負載的偏心等對建模的影響,并利用聯合仿真技術對動力學模型的準確性進行了驗證。
1 模擬平臺結構
多維微振動模擬平臺的結構如圖1所示,該模擬平臺基于Gough-Stewart構型,由上、下平臺、六條伸縮支腿、和上、下鉸鏈組成。其中上鉸鏈具有三個自由度,下鉸鏈具有兩個自由度。支腿由音圈電機進行驅動,如圖2所示。支腿包括:限位擋圈、上下支撐彈簧片、外殼、音圈電機、連接桿等。音圈電機的定子部分(永磁體)通過螺釘固定在外殼內,動子部分(音圈)通過上、下支撐彈簧片固定,彈簧片可以起到直線軸承的作用,即釋放軸向自由度,限制其他方向的自由度。為防止音圈電機超出行程范圍,在上、下支撐彈簧片之間安裝有限位擋圈。支腿外殼表面開有圓孔,發揮散熱作用。
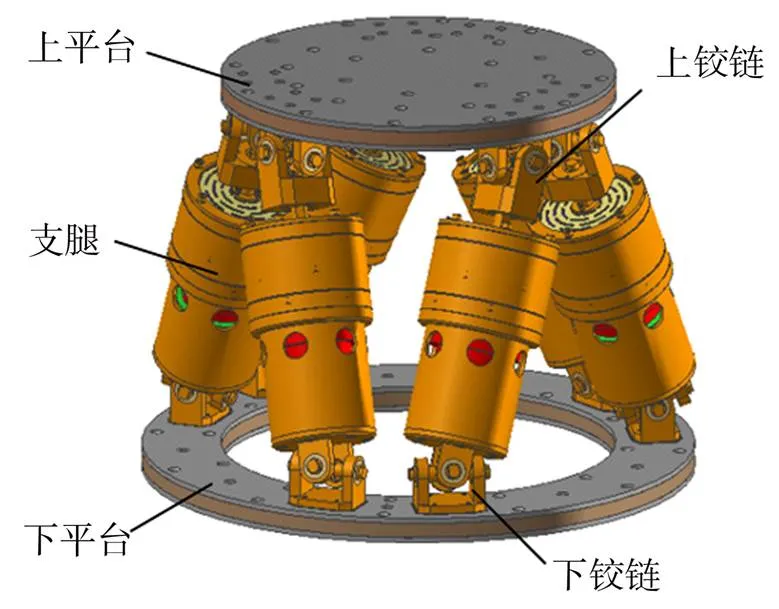
圖1 多維微振動模擬平臺三維圖
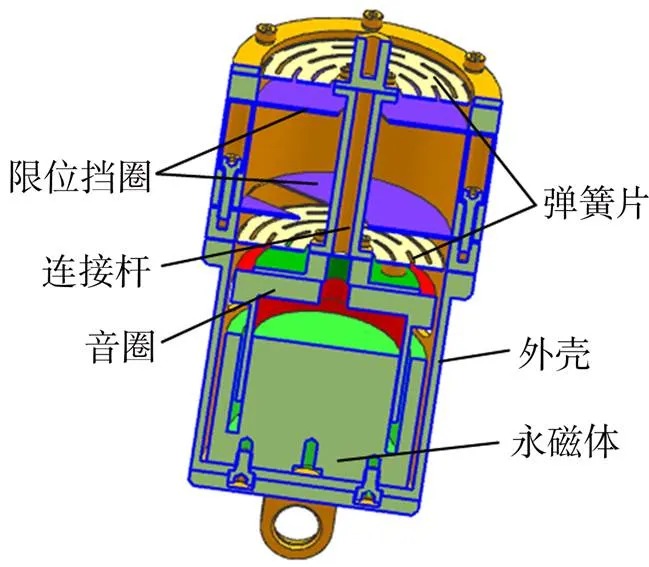
圖2 單腿剖視圖
微振動模擬平臺的簡化模型如圖3所示,坐標系{}為隨體坐標,固結在動平臺上,其原點與上鉸點的幾何中心重合。坐標系{}為定坐標系,于下平臺固結,其原點與下鉸點的幾何中心重合。坐標系{}為慣性坐標系,其原點與下平臺安裝面處的幾何中心重合。上平臺相對定坐標系{}的姿態角定義為[]T,上平臺上的鉸接點用P表示,其在隨體坐標系中的坐標為P。下平臺的鉸接點用B表示,其在定坐標系中的坐標為B。R和R分別表示上平臺和下平臺的外接圓半徑,鉸點1與6的圓心角為(以下簡稱上圓心角),鉸點1與6的圓心角為(以下簡稱下圓心角)。
2 模擬平臺理論模型
2.1 運動學
在定坐標系{}中,第根作動器的位置矢量可以表示為:
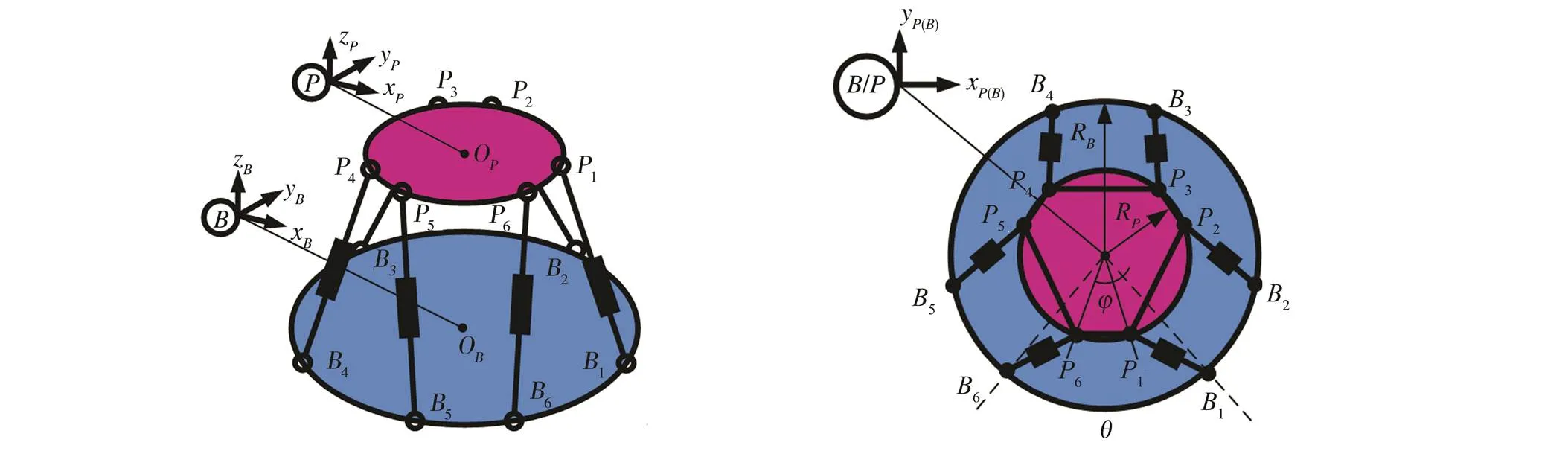
圖3 微振動模擬平臺結構

式中:表示隨體坐標系在定坐標系中的位置,= []T;表示從隨體坐標系到定坐標系的變換矩陣。
表達如式(2):

根據理論力學知識可得以下表達式:
(3)
(5)
將式(3)左右兩邊對時間求導,同時假設加速作動器繞自身中心軸線的轉動角速度和角加速度為零(即且),通過化簡可以得到作動器的角速度:

同理,可得到上鉸點P的加速度:
(7)
根據理論力學基礎知識,可以采用上作動器質心處的速度及其角速度來表示上鉸點P的速度:

整理式(6)可得上作動器質心處的速度:
(9)
將式(3)帶入式(7)化簡得:

利用雅克比矩陣J表示上式,可得:
(11)
式中:表示從上鉸點的速度到上作動器質心速度的雅克比矩陣,。
對式(9)左右兩邊微分,并進行化簡,可以得到上作動器質心處的加速度:
(12)
同理可得下作動器質心處的速度和加速度,分別為:

(14)
式中:表示從上鉸點的速度到上作動器質心速度的雅克比矩陣,。
當上平臺和負載的質心與隨體坐標系{}的原點不重合時,會產生離心力和科氏力。因此在進行理論建模時,需要考慮上平臺與負載的偏心量。用表示上平臺和負載在隨體坐標系{}中的綜合質心,則綜合質心可以表示為:
對式(3)左右兩邊兩次求導,得到綜合質心處的加速度:
(16)
2.2 動力學模型
當負載質量遠大于作動器自身質量時,作動器質量屬性可以忽略不計。對于該研究,作動器質量與負載質量相近,因此不能忽略不計。結合牛頓-歐拉方法和拉格朗日方程對微振動模擬臺進行理論模型推導,可以得到多維微振動模擬平臺的完整動力學方程:

(17)
式中:



通過式(15)可得到微振動模擬平臺的完整動力學方程的矩陣表達式:
(18)
式中:()為6 × 6的廣義質量矩陣;為6 × 6的科氏力和離心項矩陣;為 6 × 6的廣義剛度矩陣;為6 × 1的矩陣,表示六個作動器的激勵力。
式(4)左右兩邊左乘T,得到作動器的激勵力:

3 聯合仿真
為驗證理論模型的準確性,文中聯合ADAMS和MATLAB/Simulink進行仿真來實現。首先,將微振動模擬臺的數字樣機導入到多剛體系統仿真軟件ADAMS中;其次,利用Simulink中的S函數建立微振動模擬平臺的理論模型,并通過分析計算得到作動器的激勵力;然后建立Simulink與ADAMS之間的通訊關系,利用Simulink計算得到的激勵力來驅動虛擬樣機中的ADAMS模型;最后,通過Adams中的傳感器測試得到上平臺的六維加速度值,并將加速信號導入到Simulink中,比較仿真值與目標值的差別。圖為ADAMS與Simulink聯合仿真的框圖。如圖所示,該圖為聯合仿真的Simulink模型,由七個模塊組成。第一個模塊用于生成目標加速度信號,第二個模塊用于設置微振動模擬器的構型參數值,第三個模塊用于設置作動器的質量屬性,微振動模擬器的剛度、阻尼、質量屬性在第四個模塊中設定,第五個模塊為S函數模塊,第六個模塊為ADAMS與Simulink軟件的訊通接口模塊,第七個模塊用于顯示上平臺的加速度值。
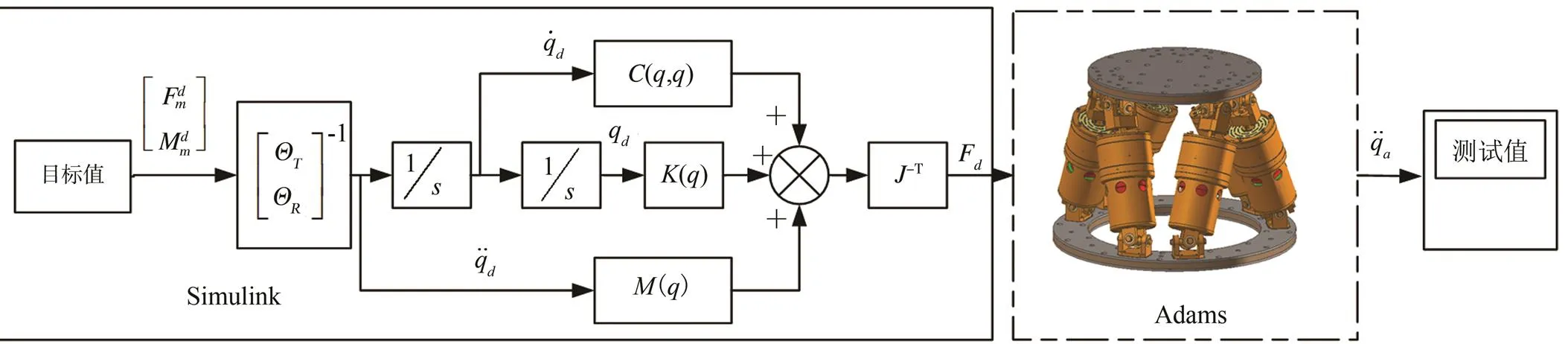
圖4 聯合仿真框圖
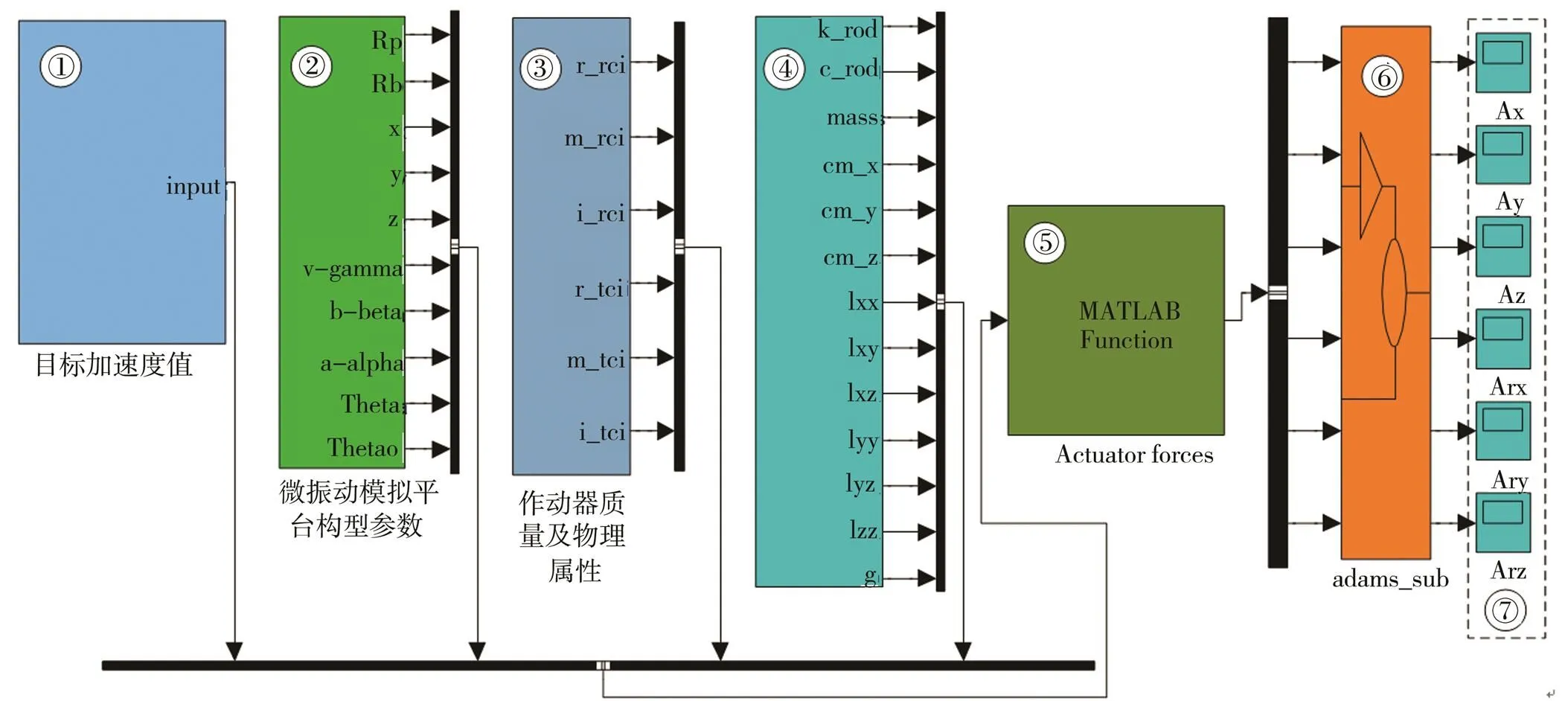
圖5 聯合仿真Simulink模型
在ADAMS模型中微振動模擬器的構型參數和質量屬性分別見表1、表2。上平臺輸出的目標加速度頻譜見表3。
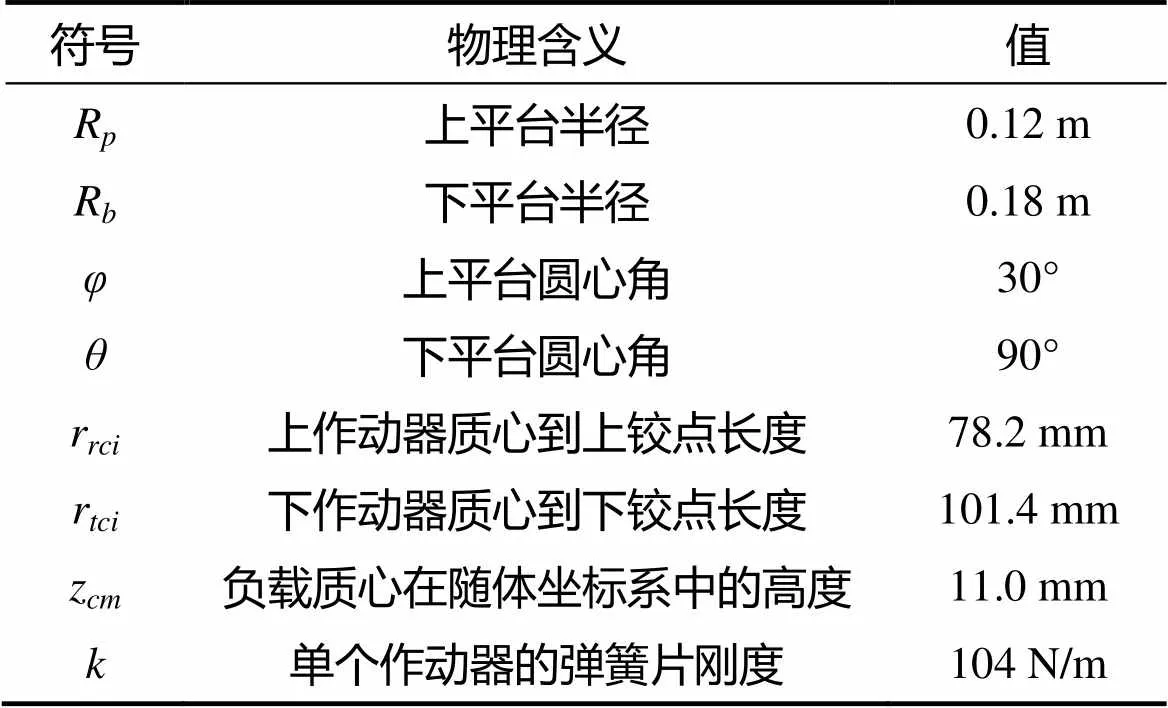
表1 微振動模擬器的構型參數

表2 微振動模擬器的質量及物理屬性

表3 微振動模擬器上平臺的目標加速度幅值
圖6和圖7為微振動平臺所產生的六個方向加速度分別在時域和頻率上的變化曲線。表 4為仿真值與目標值的相對誤差。由表4可知,平動方向和轉動方向的加速度的最大誤差分別是2.84%和0.18%,平動方向和轉動方向的加速度的最小誤差分別是0.31%和0.001%。由仿真結果可知,該微振動模擬平臺產生的微振動頻譜特性與目標值一致,文中所建立的理論模型正確,該模擬平臺能產生不同的方向的具有不同幅值和不同頻率特性的微振動。
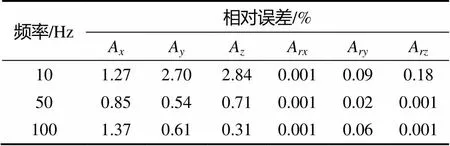
表4 微振動模擬器產生的加速度幅值與目標幅值的相對誤差
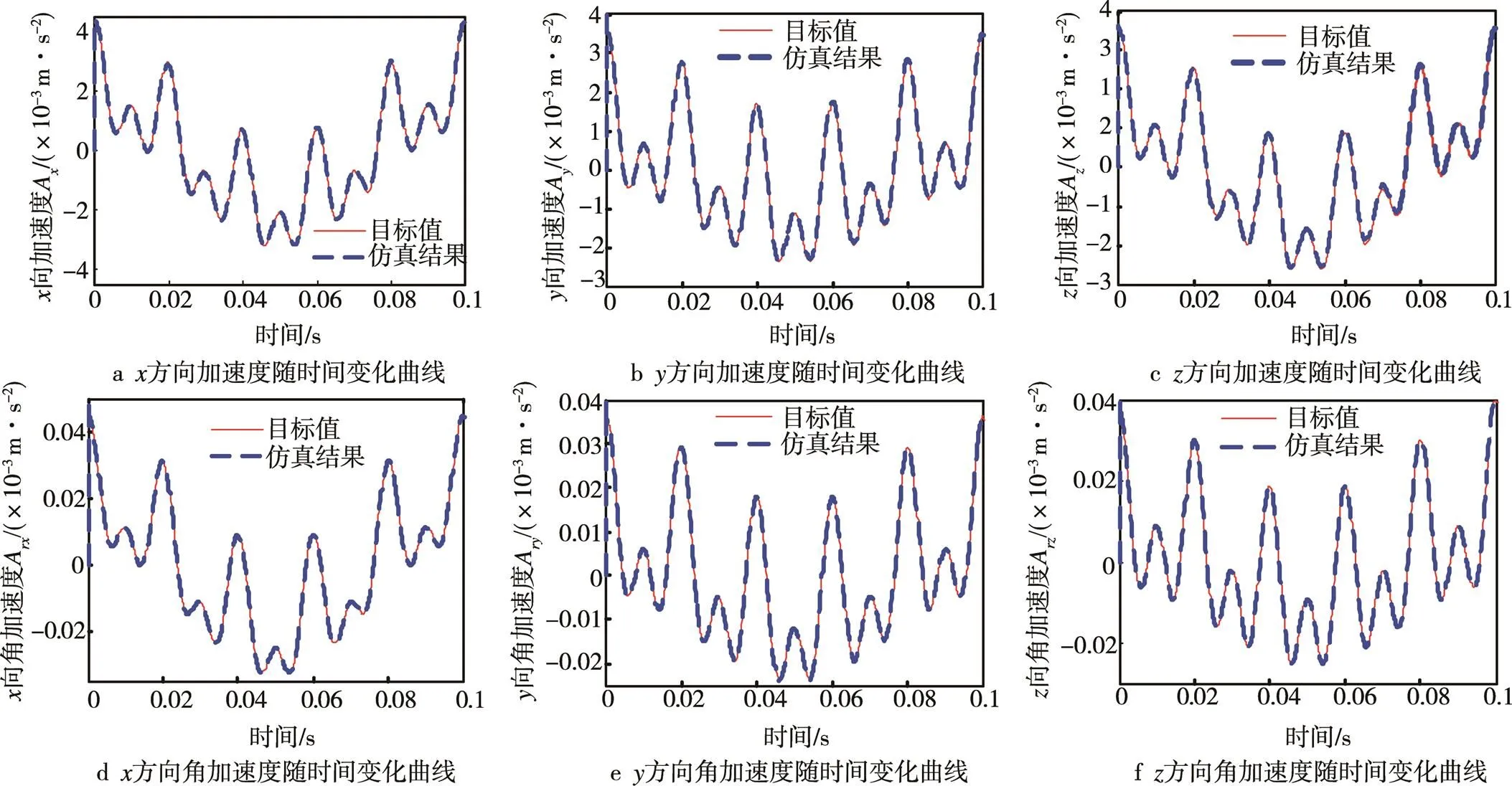
圖6 微振動模擬器上平臺產生的加速度隨時間變化曲線
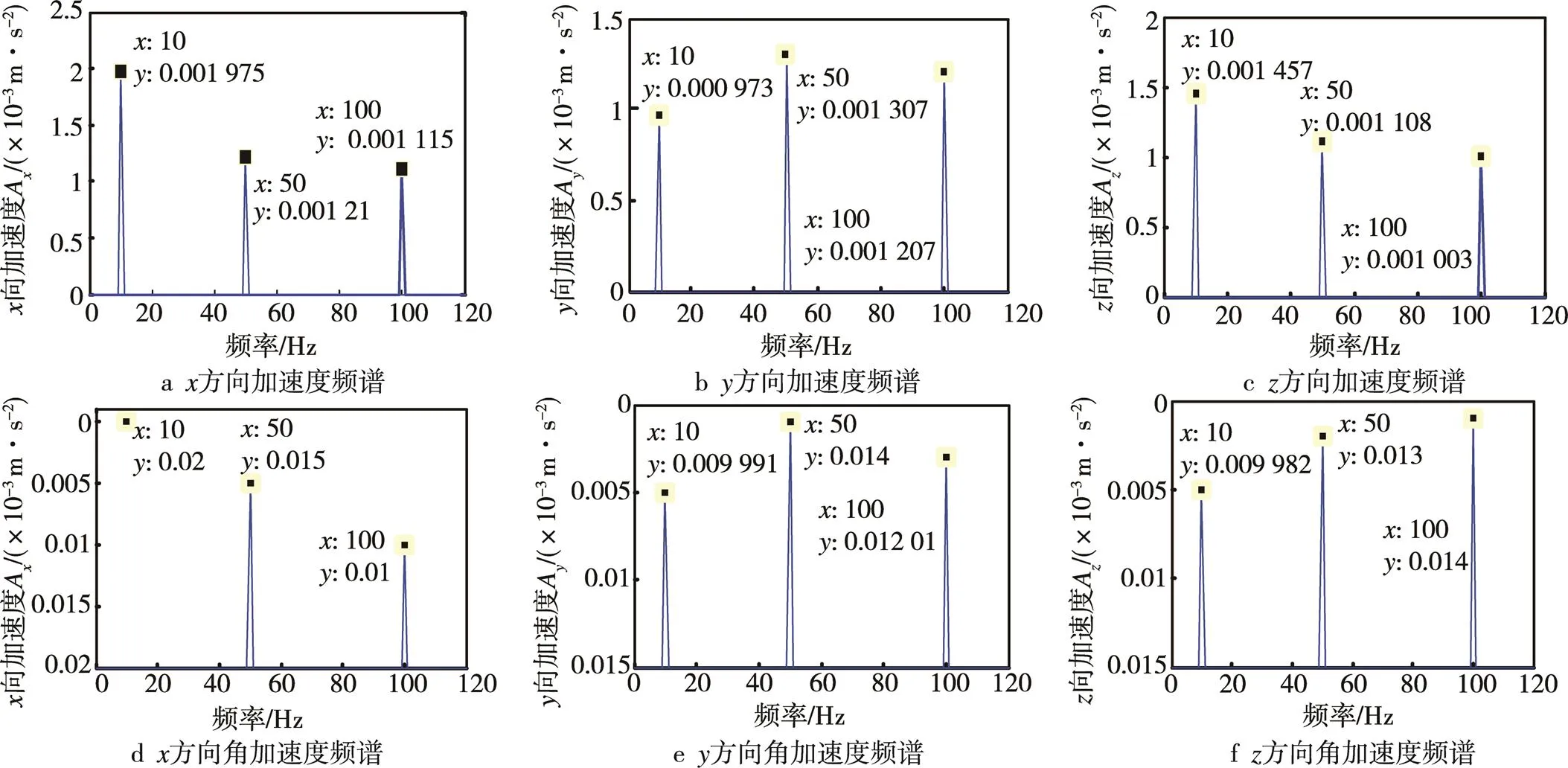
圖7微振動模擬平臺上加速度的頻譜曲線
4 結語
文中開展了基于Stewart-Gough構型的多維微振動模擬平臺研究,建立了微振動模擬平臺的理論模型。該模型考慮了載荷質心與上平臺不重合的情況,及驅動支腿質量對模擬平臺動力學方程的影響,同時考慮了驅動支腿阻尼力對激勵力的影響。為驗證理論模型的準確性,利用多剛體聯合仿真技術對微振動模擬平臺進行了聯合仿真。仿真結果表明:平動方向和轉動方向的加速度的最大誤差分別是2.84%和0.18%,理論模型準確可靠,為后續微振動模擬平臺的動力學控制提供了理論依據,具有實際的工程意義。
[1] ZHOU, W Y, LI D X. Design and Analysis of an Intelligent Vibration Isolation Platform for Reaction/Momen- tum Wheel Assemblies[J]. Journal of Sound and Vibration, 2012, 331(13): 2984-3005.
[2] MASTERSON R A, MILLER D W, GROGAN R L. Development and Validation of Reaction Wheel Disturbance Models: Empirical Model[J]. Journal of Sound and Vibration, 2002, 249(3): 575-598.
[3] LIU K C, MAGHAMI P, BLAUROCK C. Reaction Wheel Disturbance Modeling, Jitter Analysis, and Vibration, Tests for Solar Dynamics Observatory[C]// Navigation and Control Conference and Exhibit. In AIAA Guidance, 2008.
[4] KIM D K. Micro-vibration Model and Parameter Estimation Method of a Reaction Wheel Assembly[J]. Journal of Sound and Vibration, 2014, 333(18): 4214-4231.
[5] LIU C, JING X, DALEY S, et al., Recent Advances in Micro-vibration Isolation[J]. Mechanical Systems and Signal Processing, 2015, 56/57(1): 55-80.
[6] KAMESH D, PANDIYAN R, GHOSAL A. Modeling, Design and Analysis of Low Frequency Platform for Attenuating Micro-vibration in spacecraft[J]. Journal of Sound and Vibration, 2010, 329(17): 3431-3450.
[7] KAMESH D, PANDIYAN R, GHOSAL A. Passive Vibration Isolation of Reaction Wheel Disturbances Using a Low Frequency Flexible Space Platform[J]. Journal of Sound and Vibration, 2012, 331: 1310-1330.
[8] ZHOU WY, LI D X, LUO Q, et al. Design and Test of a Soft Suspension System for Cantilevered Momentum Wheel Assembly[J]. Journal of Aerospace Engineering, 2012, 227(7): 1144-1160.
[9] ZHOU WY, LI D X. Experimental Research on a Vibration Isolation Platform for Momentum Wheel Assembly [J]. Journal of Sound and Vibration, 2013, 332(5): 1157- 1171.
[10] DWARAKANATH T A, BHUTANI G. Beam Type Hexapod Structure Based Six Component Force–torque Sensor[J]. Mechatronics, 2011, 21(8): 1279-1287.
[11] AXINTE D A, ALLEN J M, ANDERSON R, et al. Free-leg Hexapod: A Novel Approach of Using Parallel Kinematic Platforms for Developing Miniature Machine Tools for Special Purpose Operations[J]. CIRP Annals - Manufacturing Technology, 2011, 60(1): 395-398.
[12] YU X Y, CHEN L. Modeling and Observer-based Augmented Adaptive Control of Flexible-joint Free-floating Space Manipulators[J]. Acta Astronautica, 2015, 108: 146-155.
[13] TING Y, CHEN Y S, JAR H C. Modeling and Control for a Gough-Stewart Platform CNC Machine[J]. Journal of Robotic Systems, 2004, 21(11): 609-623.
[14] DASGUPTA B, MRUTHYUNJAYA T S. The Stewart Platform Manipulator: A Review[J]. Mechanism and Machine Theory, 2000, 35(1): 15-40.
[15] OFTADEH R, AREF M M, TAGHIRAD H D. Explicit Dynamics Formulation of Stewart-Gough Platform: A Newton-Euler Approach[C]// In IEEE International Conference on Intelligent Robots and Systems. Taiwan: IEEE, 2010.
[16] DASGUPTA B, MRUTHYUNJAYA T S. A Newton-Euler Formulation for the Inverse Dynamics of the Stewart Platform Manipulator[J]. Mechanism and Machine Th- eory, 1998, 33(8): 1135-1152.
Theoretical Modeling and Simulation Study on the Multi-dimensional Micro-vibration Simulator
YANG Jian-feng1,2,3, HUANG Chuang-mian1,2,4, WANG Yuan-hang1,3,4, LI Xiao-bing1,4,5, LI Kai1,2,4
(1.The Fifth Electronic Institute of MIIT, Guangzhou 510610, China; 2.Guangdong Provincial Research Center of Electronic Information Products Reliability and Environment Engineering Technology, Guangzhou 510610, China; 3.Guangdong Provincial Key Laboratory of Electronic Information Products Reliability Technology, Guangzhou 510610, China; 4.Guangzhou Province Key Laboratory of Electronic Information Products Reliability and Environment Engineering Technology, Guangzhou 510610, China; 5.Guangdong Industrial Robot Reliability Engineering Laboratory, Guangzhou, 510610, China)
Objective To reproduce the micro-vibrations generated by the reaction on wheel assembly. Methods A multi-dimensional micro-vibration simulator (MMVS) which could generate six-dimensional micro-vibration acceleration spectrum was designed. First, the relation between velocity and acceleration of payload and the driving legs were analyzed. The complete dynamic model of the MMVS was then derived with New-Euler method in combination with Lagrange approach. Finally, co-simulation was adopted to verify the validity of the theoretical model by connecting ADAMS and MATLAB/Simulink. Results The maximum error between theoretical model and simulation was 2.84%. Conclusion The theoretical model is accurate and reliable and can be used as the theoretical foundation of the dynamics controller.
micro-vibrations; simulator; gough-stewart platform; reaction wheel assembly
10.7643/ issn.1672-9242.2017.08.008
TJ01
A
1672-9242(2017)08-0039-07
2017-03-31;
2017-05-04
楊劍鋒(1989—),男,湖北天門人,博士,主要從事振動抑制及多體系統動力學建模等方面的研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學大眾(2023年17期)2023-10-26 07:39:14
當代陜西(2022年5期)2022-04-19 12:10:18
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:28
湘潮(上半月)(2021年4期)2021-07-20 08:05:28
汕頭大學學報(自然科學版)(2020年4期)2020-12-14 07:05:00
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2020年2期)2020-06-02 11:29:24
數學物理學報(2017年6期)2018-01-22 02:26:40