車輛動(dòng)力學(xué)模型的優(yōu)化分析
2017-09-17 20:10:20馮曉宇
科學(xué)與財(cái)富 2017年25期
摘要:為保證車輛行駛過(guò)程中的安全性,本文首先對(duì)車輛的動(dòng)力學(xué)模型進(jìn)行了簡(jiǎn)化處理,得到車輛動(dòng)力學(xué)的數(shù)學(xué)模型,然后分析出控制車輛穩(wěn)定運(yùn)行時(shí)的關(guān)鍵參數(shù),為使車輛行駛在最優(yōu)參數(shù)下,獲得最大的行駛安全性,結(jié)合遺傳優(yōu)化算法,對(duì)數(shù)學(xué)模型進(jìn)行優(yōu)化計(jì)算分析,最后,通過(guò)計(jì)算分析得到最優(yōu)的控制參數(shù),保證車輛行駛過(guò)程中的安全性。
關(guān)鍵詞:車輛動(dòng)力學(xué);優(yōu)化計(jì)算;遺傳優(yōu)化計(jì)算;安全行駛
1、 引言
隨著科學(xué)技術(shù)的飛速發(fā)展,交通行駛道路的路面得到極大改善,以及車輛制造的工藝越來(lái)越好,致使目前車輛設(shè)計(jì)的最高時(shí)速和車輛行駛的速度越來(lái)越快,另外,車輛駕駛員初次駕駛的年齡逐漸低齡化,同時(shí)仍有部分老年駕駛員在道路上駕駛車輛行駛,這就需要現(xiàn)代車輛具有良好的操控性和安全性。
2、 車輛動(dòng)力學(xué)模型分析
假設(shè)輪胎回正力矩對(duì)車輪外傾角無(wú)影響,則簡(jiǎn)化車輛模型的輪胎力是關(guān)于輪胎側(cè)偏角和垂直載荷這兩個(gè)因素的函數(shù),又因輪胎側(cè)向力與輪胎側(cè)偏角為線性關(guān)系,進(jìn)而可以獲得簡(jiǎn)化后車輛模型的車輛動(dòng)力學(xué)方程為:
(1)
上式中,m為車輛所具有的質(zhì)量,v為車輛側(cè)向速度,r為車輛橫擺角速度,uc為車輛前進(jìn)速度,Caf為車輛前輪側(cè)偏剛度,Car為車輛后輪側(cè)偏剛度,a為車輛前軸到質(zhì)心的距離,b為車輛后軸到質(zhì)心的距離,I為車輛橫擺的轉(zhuǎn)動(dòng)慣量。
進(jìn)一步,令車輛的狀態(tài)變量為
(2)
前輪轉(zhuǎn)角作為系統(tǒng)輸入U(xiǎn),車輛的理想動(dòng)力學(xué)模型的狀態(tài)空間為:
(3)
其中
依據(jù)車輛的理想動(dòng)力學(xué)模型可得車輛的理想橫擺角速度rno,另外結(jié)合輪胎與地面之間最大附著系數(shù)的限制,
(4)
上式中,v為車輛側(cè)向速度,r為車輛橫擺角速度,為輪胎與地面之間的附著系數(shù),g為重力加速度,R為車輛的轉(zhuǎn)向半徑。
在實(shí)際應(yīng)用過(guò)程中,一般處理方法為:
(5)
所以通過(guò)比較rno,rmu,的最小值,即為得到確定的車輛橫擺角速度期望值rm,利用制動(dòng)過(guò)程中產(chǎn)生的橫擺力矩,使得實(shí)際的車輛橫擺角速度與期望的車輛橫擺角速度一致,這樣就可以盡量保持車輛行進(jìn)過(guò)程中的穩(wěn)定性。
但是,隨著行駛車輛的車速越來(lái)越快,或者車輛方向盤的轉(zhuǎn)角越來(lái)越大,此時(shí)車輛的側(cè)偏角與側(cè)偏角速度都趨于變大,車輛的行駛不穩(wěn)定性也隨之而來(lái),很難通過(guò)自我修正的方法使車輛恢復(fù)至穩(wěn)定狀態(tài),如圖1所示,只有側(cè)偏角和側(cè)偏角速度位于相平面中心位置時(shí),車輛可以保持穩(wěn)定的行駛狀態(tài)。
通過(guò)確定的車輛橫擺角速度期望值rm以及車輛側(cè)偏角βm,與車輛實(shí)際行駛過(guò)程中所具有的車輛橫擺角速度期望值r以及車輛側(cè)偏角β,經(jīng)過(guò)比較器得出二者相對(duì)應(yīng)的差值Δr與Δβ,根據(jù)所得的Δr與Δβ的大小確定車輛修正擺正力矩ΔM,進(jìn)而使得車輛保持車輛動(dòng)力學(xué)穩(wěn)定性。
3、 動(dòng)力學(xué)模型的優(yōu)化分析
3.1 優(yōu)化分析方法簡(jiǎn)介
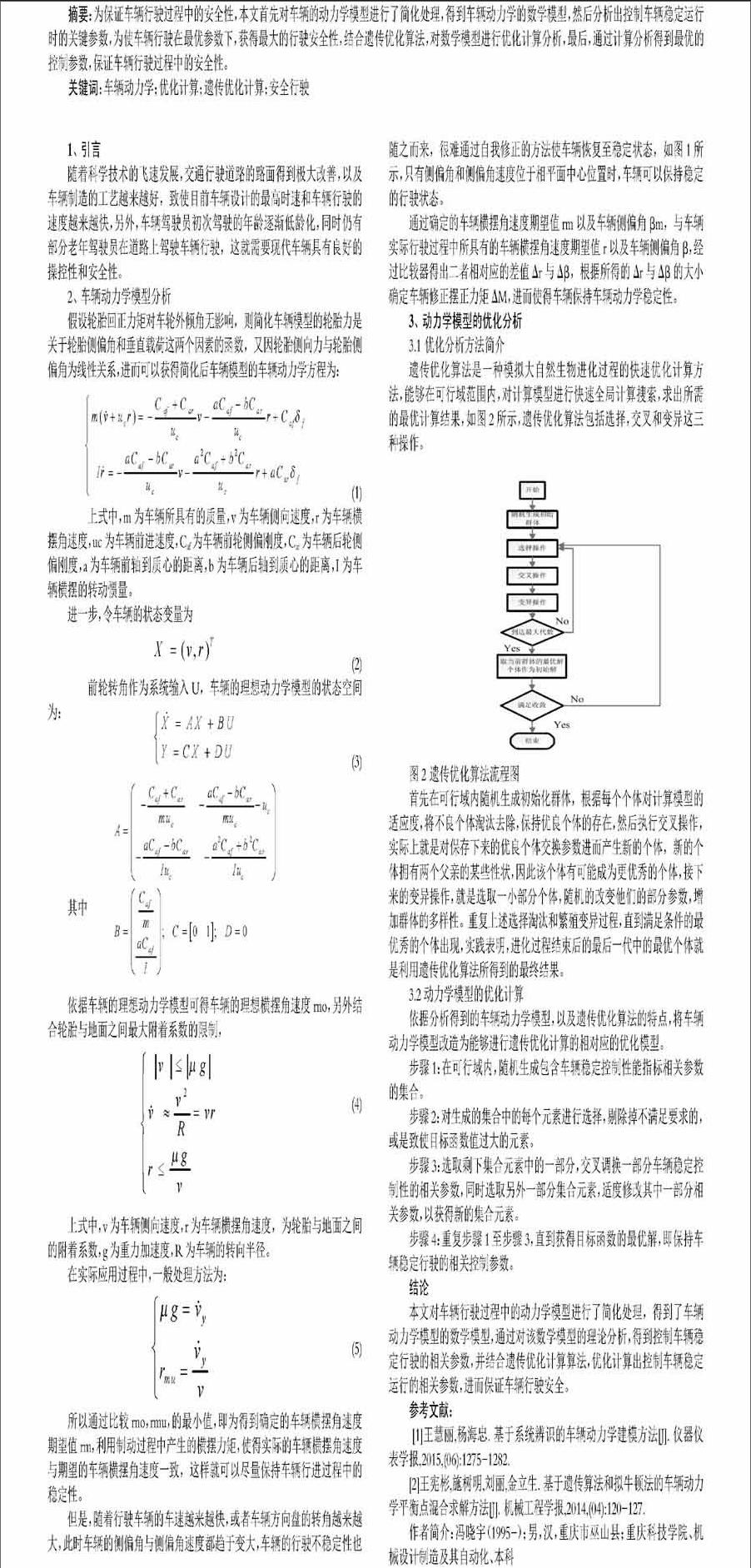
遺傳優(yōu)化算法是一種模擬大自然生物進(jìn)化過(guò)程的快速優(yōu)化計(jì)算方法,能夠在可行域范圍內(nèi),對(duì)計(jì)算模型進(jìn)行快速全局計(jì)算搜索,求出所需的最優(yōu)計(jì)算結(jié)果,如圖2所示,遺傳優(yōu)化算法包括選擇,交叉和變異這三種操作。
圖2 遺傳優(yōu)化算法流程圖
首先在可行域內(nèi)隨機(jī)生成初始化群體,根據(jù)每個(gè)個(gè)體對(duì)計(jì)算模型的適應(yīng)度,將不良個(gè)體淘汰去除,保持優(yōu)良個(gè)體的存在,然后執(zhí)行交叉操作,實(shí)際上就是對(duì)保存下來(lái)的優(yōu)良個(gè)體交換參數(shù)進(jìn)而產(chǎn)生新的個(gè)體,新的個(gè)體擁有兩個(gè)父親的某些性狀,因此該個(gè)體有可能成為更優(yōu)秀的個(gè)體,接下來(lái)的變異操作,就是選取一小部分個(gè)體,隨機(jī)的改變他們的部分參數(shù),增加群體的多樣性。重復(fù)上述選擇淘汰和繁殖變異過(guò)程,直到滿足條件的最優(yōu)秀的個(gè)體出現(xiàn),實(shí)踐表明,進(jìn)化過(guò)程結(jié)束后的最后一代中的最優(yōu)個(gè)體就是利用遺傳優(yōu)化算法所得到的最終結(jié)果。
3.2動(dòng)力學(xué)模型的優(yōu)化計(jì)算
依據(jù)分析得到的車輛動(dòng)力學(xué)模型,以及遺傳優(yōu)化算法的特點(diǎn),將車輛動(dòng)力學(xué)模型改造為能夠進(jìn)行遺傳優(yōu)化計(jì)算的相對(duì)應(yīng)的優(yōu)化模型。
步驟1:在可行域內(nèi),隨機(jī)生成包含車輛穩(wěn)定控制性能指標(biāo)相關(guān)參數(shù)的集合。
步驟2:對(duì)生成的集合中的每個(gè)元素進(jìn)行選擇,剔除掉不滿足要求的,或是致使目標(biāo)函數(shù)值過(guò)大的元素。
步驟3:選取剩下集合元素中的一部分,交叉調(diào)換一部分車輛穩(wěn)定控制性的相關(guān)參數(shù),同時(shí)選取另外一部分集合元素,適度修改其中一部分相關(guān)參數(shù),以獲得新的集合元素。
步驟4:重復(fù)步驟1至步驟3,直到獲得目標(biāo)函數(shù)的最優(yōu)解,即保持車輛穩(wěn)定行駛的相關(guān)控制參數(shù)。
結(jié)論
本文對(duì)車輛行駛過(guò)程中的動(dòng)力學(xué)模型進(jìn)行了簡(jiǎn)化處理,得到了車輛動(dòng)力學(xué)模型的數(shù)學(xué)模型,通過(guò)對(duì)該數(shù)學(xué)模型的理論分析,得到控制車輛穩(wěn)定行駛的相關(guān)參數(shù),并結(jié)合遺傳優(yōu)化計(jì)算算法,優(yōu)化計(jì)算出控制車輛穩(wěn)定運(yùn)行的相關(guān)參數(shù),進(jìn)而保證車輛行駛安全。
參考文獻(xiàn):
[1]王慧麗,楊海忠. 基于系統(tǒng)辨識(shí)的車輛動(dòng)力學(xué)建模方法[J]. 儀器儀表學(xué)報(bào),2015,(06):1275-1282.
[2]王憲彬,施樹明,劉麗,金立生. 基于遺傳算法和擬牛頓法的車輛動(dòng)力學(xué)平衡點(diǎn)混合求解方法[J]. 機(jī)械工程學(xué)報(bào),2014,(04):120-127.
作者簡(jiǎn)介:馮曉宇(1995-);男,漢,重慶市巫山縣;重慶科技學(xué)院、機(jī)械設(shè)計(jì)制造及其自動(dòng)化、本科endprint