導(dǎo)航雷達(dá)伺服系統(tǒng)設(shè)計(jì)
2017-09-28 07:32:03文曉明
中國設(shè)備工程 2017年18期
文曉明
(安徽長安專用汽車制造有限公司, 安徽 六安 237010)
導(dǎo)航雷達(dá)伺服系統(tǒng)設(shè)計(jì)
文曉明
(安徽長安專用汽車制造有限公司, 安徽 六安 237010)
導(dǎo)航雷達(dá)在現(xiàn)代社會中運(yùn)用領(lǐng)域十分廣泛,本文簡單介紹了導(dǎo)航雷達(dá)伺服系統(tǒng)的主要組成和參數(shù)設(shè)計(jì)。希望通過此次研究,對以后雷達(dá)伺服系統(tǒng)設(shè)計(jì)領(lǐng)域有促進(jìn)作用。
導(dǎo)航雷達(dá);伺服系統(tǒng);組成;設(shè)計(jì)
1 導(dǎo)航雷達(dá)伺服系統(tǒng)組成
導(dǎo)航雷達(dá)伺服機(jī)構(gòu)主要有3部分組成。包括天線電機(jī)驅(qū)動、天線方位識別和產(chǎn)生艦首導(dǎo)前標(biāo)識。電氣示意框圖、天線以及天線底座內(nèi)部安裝示意圖見圖1。
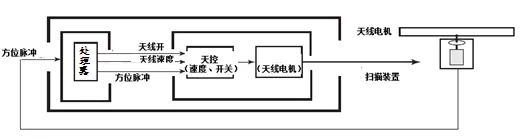
圖1 導(dǎo)航雷達(dá)伺服系統(tǒng)設(shè)計(jì)
1.1 天線轉(zhuǎn)速控制
天線轉(zhuǎn)速是24rpm/42rpm,電機(jī)選擇1500r/min,減速比設(shè)計(jì)為60:1,那么轉(zhuǎn)速約為24r/min。第一組齒輪減速比為6:1,帶減速機(jī)的電機(jī)軸轉(zhuǎn)速應(yīng)該是144r/min。電機(jī)的齒輪減速比正好是齒輪模數(shù)比的倒數(shù),傳動比為:i14= i12·i2,3·i3≈90.4,天線傳動齒輪模數(shù)之間的關(guān)系見圖2。
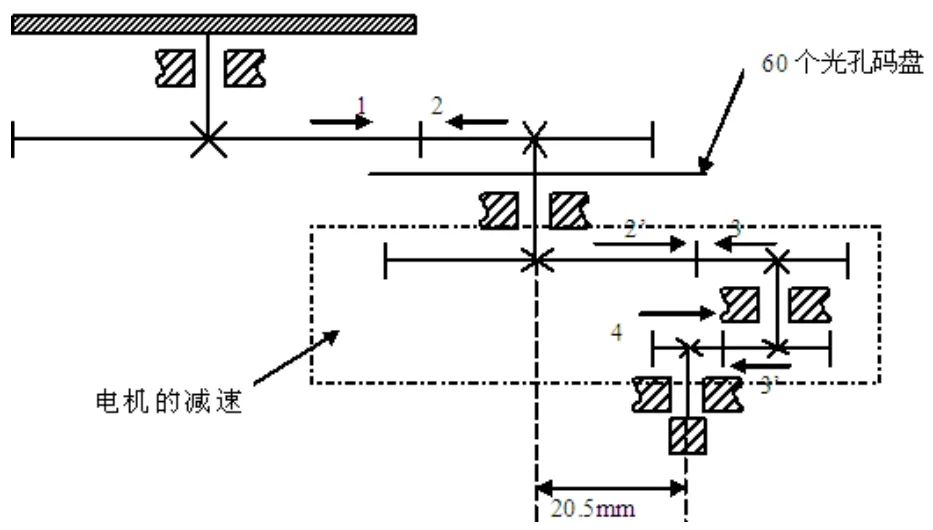
圖2 天線傳動齒輪模數(shù)之間的關(guān)系
1.1.1 電機(jī)扭矩計(jì)算
要帶動天線轉(zhuǎn)動需要選擇電機(jī)扭矩值的大小:天線的外型和轉(zhuǎn)動的方向及尺寸標(biāo)注如圖3所示。
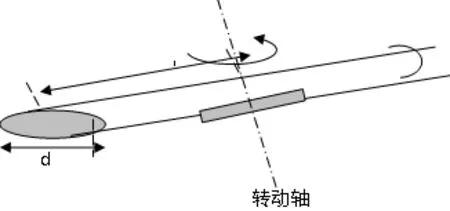
圖3 天線的外型和轉(zhuǎn)動的方向及尺寸標(biāo)注
密度均勻的旋轉(zhuǎn)棒型物體力矩公式為:
GD2=(L2+d2)·g ·ρ·S·L/3=G·(L2+d2)/3式中:GD2——力矩,N·m;
G=mg——重力,N;
L ——橫向天線長度,m;
S ——橫截面面積,m2;
ρ——物體密度,kg/m3;
g——重力加速度,m/s2;
d——橫向截面寬度,m。
按最大值算:m=5kg 、L=1.1m、d=0.2m得:
不考慮減速箱的效率,電機(jī)的扭矩應(yīng)該為:0.34N·m。轉(zhuǎn)換成1500r/min電機(jī)的功率為:
P=TM·NM/9565
式中:P——電動機(jī)功率,kW;
TM——電動機(jī)轉(zhuǎn)矩,N·m;
NM——電動機(jī)轉(zhuǎn)速,r/min。
算得電機(jī)的功率為:P≈52W,考慮齒輪傳動效率,另外,電機(jī)功率選擇增加一定的余量,電機(jī)功率選擇100W足夠了。
據(jù)以上理論分析:電機(jī)與減速機(jī)選擇杭州羅紋電子有限公司型號為92BLZ,24VDC電機(jī)。
1.1.2 方位角度產(chǎn)生和艦首標(biāo)識信號
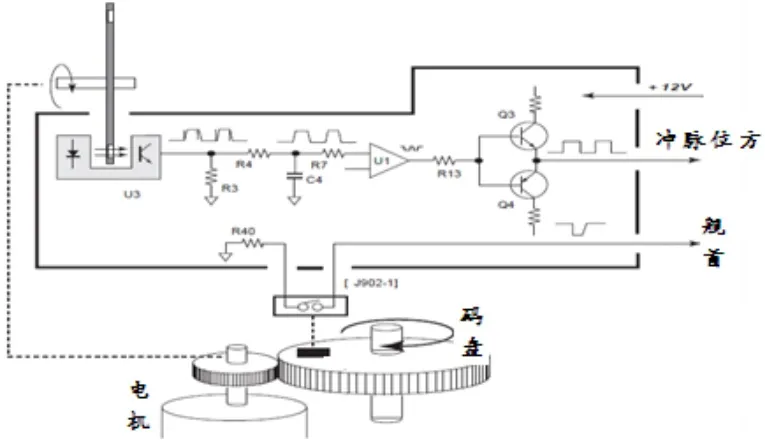
圖4
導(dǎo)航雷達(dá)的方位脈沖,是靠帶槽的光電開關(guān)和一個裝在天線傳動齒輪上的碼盤來識別,如圖4。
裝在天線傳動齒輪上的碼盤正好有60個光孔,通過6:1的減速比,正好對應(yīng)碼盤轉(zhuǎn)動6圈對應(yīng)天線轉(zhuǎn)一周。碼盤光電開關(guān)產(chǎn)生359個方位脈沖,經(jīng)過激勵電壓放大與功率驅(qū)動輸出。
艦首線的產(chǎn)生,是在天線底座上做個刻度線和1個磁性感應(yīng)器,安裝天線時將這個刻度指向艦首,電路上通過一個磁力開關(guān)感應(yīng)就形成艦首線信號。
[1] 彭祥龍. 船用導(dǎo)航雷達(dá)的技術(shù)發(fā)展及最新應(yīng)用[J].電訊技術(shù),2013(09).
[2] 常會振. 船舶導(dǎo)航雷達(dá)發(fā)展趨勢的研究[J].中國水運(yùn)(下半月),2013(01).
U665.22
:A
:1671-0711(2017)09(下)-0216-02