熱工過程數據驅動子空間預測控制的研究
2017-10-09 07:52:22景亞杰朱小良
發電設備 2017年5期
景亞杰, 朱小良
(東南大學 能源與環境學院, 南京 210096)
熱工過程數據驅動子空間預測控制的研究
景亞杰, 朱小良
(東南大學 能源與環境學院, 南京 210096)
為改進目前火電機組機爐協調系統預測控制的效果,在多模型子空間預測控制研究的基礎上,利用子空間方法直接從數據中得到預測控制器,并將數據驅動子空間預測控制與基于子空間的多模型預測控制兩種控制策略進行仿真比較,結果表明所研究的控制方法可行且有效,為進一步研究提供了思路。
機爐協調系統; 數據驅動模型; 子空間辨識; 多模型; 預測控制
Abstract: To improve the predictive control effect of current boiler-turbine coordinated system in coal-fired power unit, on the basis of predictive control research for multi-model subspace, the subspace method was used to obtain data directly from predictive controller. Simulation results of both the data-driven subspace predictive control and subspace-based multi-model predictive control were compared. Results show that the method proposed is feasible and effective, which may serve as a reference for further research of similar problems.
Keywords: boiler-turbine coordinated system; data-driven modeling and control; subspace identification; multi-model; predictive control
對于熱力發電廠而言,控制系統的控制效果好壞影響著整個電廠的經濟性和安全性。在熱力發電廠的機爐協調系統中,由于存在多變量、時變、變量間強耦合、非線性和時延遲等特點,導致控制任務實現的過程中存在很多障礙。同時,大型電廠為了滿足電網負荷調節的需求,經常需要改變功率輸出。電廠頻繁地大范圍變負荷運行,使得非線性對控制效果的影響進一步加劇。因此,熱力發電廠控制系統需要更先進可靠的控制方案來盡可能減少這種非線性影響,以提高機爐協調控制系統的控制性能和提高電廠效率。為此,各種控制策略,如智能PID[1]、模型預測控制[2]、H∞控制[3]、增益調度控制[4]等,已被研究并應用。一般控制策略中,要設計一個控制器,首先需要構建一個模型。由于狀態空間模型可以反映系統的內部行為及系統輸入和輸出的關系[5],很多學者以狀態空間模型的形式設計多變量預測控制系統。得到狀態空間模型的方法很多,比如采用泰勒級數展開的線性化方法轉化為狀態空間矩陣,但該方法會增加設計控制器的復雜性。
文獻[6]中提出一種使用輸入輸出數據,進行子空間辨識來獲得狀態空間模型的控制方法。該方法借助QR分解、奇異值分解等數學工具,辨識過程不涉及迭代,文獻[7]最后的仿真也驗證了其有效性,但目前這種控制策略在熱力發電廠這類非線性系統的研究中還不夠深入。楊華[8]提出通過子空間辨識直接得到控制器的思路,而筆者研究的數據驅動子空間預測控制的方法正是按照這種思路利用子空間辨識直接從數據中得到控制器。因為模型是直接從數據中得到的,那么數據中的信息一定不少于模型,所以直接從數據中建立控制器理論上完全可以實現。數據驅動子空間預測控制不需要辨識狀態方程,而是由子空間預估矩陣直接設計預測控制器,與轉化為狀態空間模型的控制方法相比,省去了求解狀態方程再得到控制器的過程,減少了計算的復雜性。筆者最后通過局部工況區間的仿真驗證了這一控制策略的可行性,由于仿真只驗證了局部工況區間,如何在大范圍的工況區間取得好的控制效果需要進一步研究。
1 系統描述
根據熱力發電廠機爐協調系統的低階非線性結構,可以選取某160 MW燃油機組作為研究對象。該機組在國內外預測控制領域的研究中已被多次作為研究對象,非常具有代表性,經驗公式可靠,約束條件簡單。吳嘯[7]提出的基于子空間的多模型預測控制策略仿真時也選擇了該模型,選擇160 MW燃油機組也便于仿真時兩種策略分析比較。
熱力發電廠主要受到給煤量、一次風量、引風量、給水量等多個控制變量的影響;被控變量主要有爐膛壓力、主蒸汽壓力、汽包水位、輸出功率、煙氣含氧量等,且各個被控變量之間還存在不同程度的耦合情況。機組協調系統的任務是保證輸出功率快速地跟隨負荷的變化,同時壓力、溫度和水位等波動需在允許的范圍內。所以筆者選取了3個最重要的輸入變量和3個最重要的輸出變量作為研究對象。3個控制輸入變量分別為:燃料閥門開度u1、主汽閥門開度u2和給水閥門開度u3。3個被控輸出變量分別為:汽包壓力p、輸出功率E和汽包水位偏移L。3個中間狀態變量分別為汽包壓力p、輸出功率E和汽水密度ρ。160 MW燃油機組的動態方程如下[9]:

(1)

(2)

(3)
該機組的約束條件是:
該約束條件的物理意義是控制閥門變動大小和調節速率的限制。
汽包水位可以通過下式求解得到:
L=50(0.13ρ+60α+0.11q-65.5)
(4)
其中,
q=(0.85u2-0.14)p+45.59u1-2.51u3-2.09α=(1/ρ-0.001 5)/(1/(0.8p-25.6)-0.001 5)
式中:α為蒸汽質量,kg;q為蒸發率,kg/s。
研究的機爐協調系統的7個典型工況點見表1[7],給定負荷指令時可在工況點處選擇。表1中:x1、x2、x3分別表示汽包壓力p、輸出功率E和汽水密度ρ;u1、u2、u3分別表示燃料閥門開度、主汽閥門開度和給水閥門開度;y3表示汽包水位偏移L。

表1 機爐協調系統模型典型工況點
2 子空間預測控制
2.1 基于子空間模型的多模型預測控制
局部線性模型是通過子空間辨識得到狀態空間模型確定,然后通過組合局部線性模型逼近原始系統的非線性模型,該方法已在文獻[7]中詳細講解。
2.2 數據驅動子空間預測控制
對于熱力發電廠這樣的多變量輸入、多變量輸出控制系統而言,其過程受到多種因素的影響,通常選取最主要的控制量和被控量構建預測控制器。在得到已知數據后,分別把輸入變量和輸出變量的n次測量數據按如下矩陣形式給出[8]:
[u0,u1,…,un]
(5)
[y0,y1,…,yn]
(6)
其中每個元素可表示為:
a、b分別表示選取的輸入變量和輸出變量的個數,均取3。
然后由已知測量數據分別構造過去輸入、未來輸入、過去輸出和未來輸出的Hankel矩陣UP、UF、YP和YF,形式如下:
(7)
(8)
(9)
(10)
ui和yi分別是由輸入輸出數據組成的列向量。
定義矩陣:
(11)
然后按下式左邊的組合矩陣進行QR分解:
(12)
根據下式得到子空間矩陣[8]:
(13)
式中:+表示矩陣的偽逆;SW稱作狀態子空間矩陣;SU稱作確定性的輸入子空間矩陣[10]。

(14)
其中,
從上述步驟中可以看出子空間預測控制器的獲取過程并沒有用到非線性迭代,因此適合在線使用。結合常規的預測控制的思想,定義性能指標J為:
(15)
該式包括跟蹤性能指標和調節性能指標。其中:rk+i為k時刻參考輸出;Q和R分別為加權矩陣,可以人為定義或調整;Ny、Nu分別為預測時域和控制時域,它們的大小會影響控制器的快速性和穩定性。如果預測時域越小,那么跟蹤性能越差,所以必須有一定的預測步數來保證跟蹤效果;反之預測時域越大的話,計算量會增加很多,系統的穩定性和魯棒性會受影響。同樣控制時域也跟穩定性和快速性有關系。控制時域越小,跟蹤的效果不會太好;控制時域越大,系統的穩定性會受影響。根據之前研究學者的經驗,可以選擇預測時域和控制時域的步數為10步左右。
根據式(14)和(15)對目標函數進行改寫:
J= -SuufQfrf-rfQfSuuf+SuufQfSwWp+

(16)
式中:rf為參考輸出,即期望的輸出值;Qf、Rf為加權矩陣。
(1) 用最新的輸入輸出數據更新Hankel矩陣Up、Uf、Yp、Yf。
(2) 用特征值求解的方法在線求解。
(3) 按照公式獲得子空間矩陣Sw、Su。
(4) 對目標函數或性能指標進行二次規劃,得到最優控制序列uf。
(5) 取優化控制序列的第一個分量加到被控系統中去,在下一個時刻,轉到步驟(1),如此依次循環即可實現完全數據驅動的子空間預測控制。
數據驅動子空間預測控制方法基本的原理如上所述,具體應用時還要注意噪聲干擾等常見問題。
2.3 兩種方法的比較
基于數據驅動的子空間預測控制方法的優勢如下:(1)該方法與多模型預測控制相比,不需要知道或構造機組的非線性模型,只需要知道機組的輸入輸出數據,由于其數據驅動的特性,該預測控制策略可以用于機組非線性模型未知的情況;(2)直接采用數據驅動,不需要構建局部狀態空間模型,避免了模型失配的弊端,具體計算過程相比多模型等預測控制簡潔。
基于子空間模型的多模型預測控制方法之所以繁瑣,是因為其還需要采用標準開環子空間[8]等方法來辨識局部模型矩陣和卡爾曼濾波增益K,并把所有的局部模型變換到統一的基上。考慮到卡爾曼濾波器的穩定性,需滿足N→∞,其中N是輸出數據Hankel矩陣的行塊數。該方法建立的Hankel矩陣用QR分解和奇異值分解時需滿足以下條件: (1)輸入變量與噪聲不相關;(2)以2N階次持續激勵輸入變量;(3)采樣數目足夠大。基于子空間方法的多模型預測控制基本原理見圖1。

圖1 基本原理
從圖1可以看出:每進入下一時刻狀態,局部模型矩陣和卡爾曼濾波增益K都需要重新計算,而直接數據驅動的子空間預測控制方法則不需要計算狀態空間模型矩陣及卡爾曼濾波增益設計,自然矩陣計算量也相應減少。
3 仿真驗證
3.1 初始輸入輸出變量數據
筆者選用工況點5的數據118.8 kg/cm2、84.06 MW、0 m分別作為汽包壓力p、輸出功率E、汽包水位L的初值,而燃料閥門開度、主汽閥門開度和給水閥門開度初值分別為0.418、0.759、0.543。汽水密度的數值是470.8。利用數學工具充分激勵機組的經驗模型獲得足夠的輸入變量和輸出變量的數據(見圖2)。
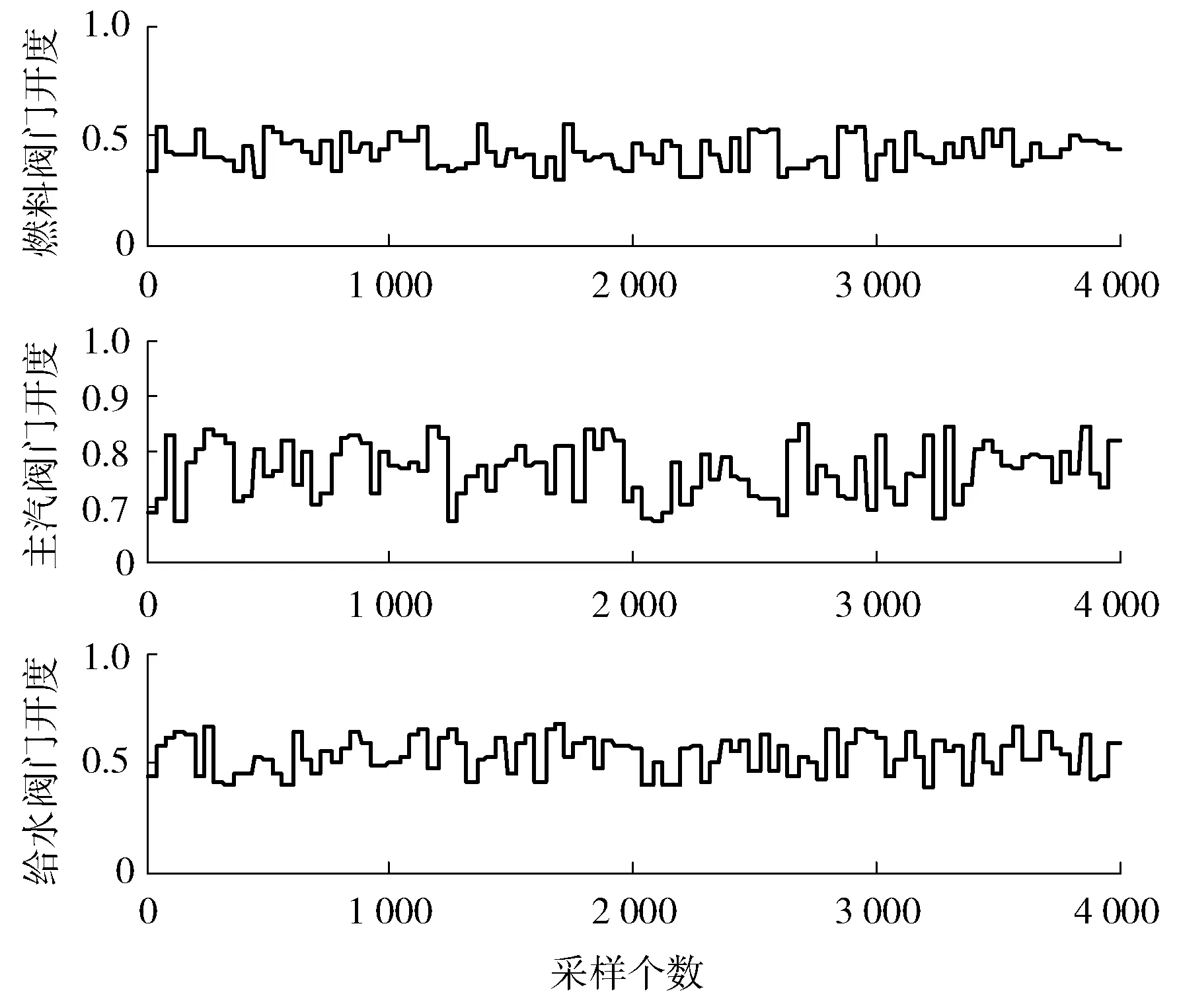
圖2 辨識所用輸入信號
將輸入變量的數據利用三個機組模型動態方程依次計算出輸出變量數據(見圖3)。
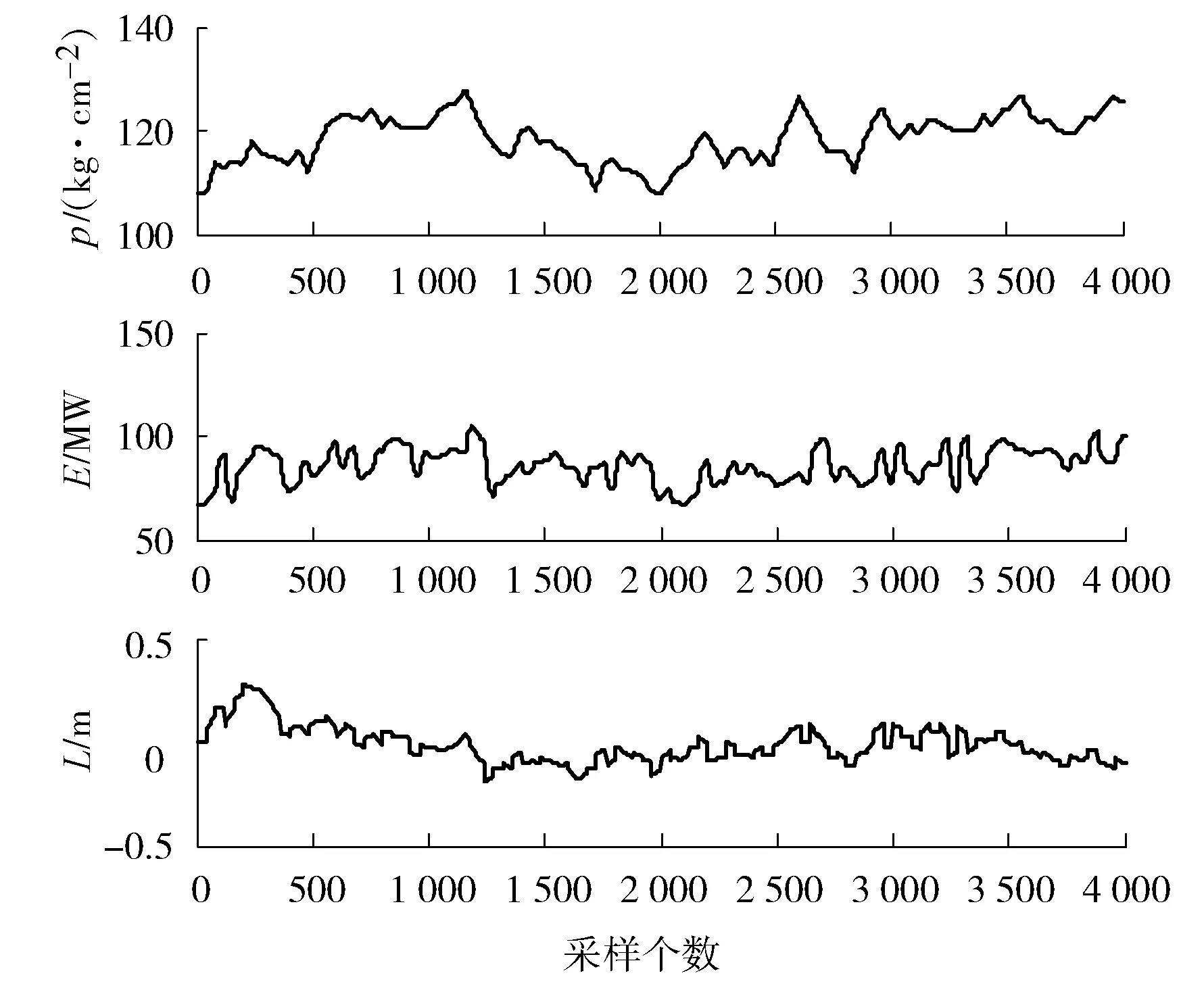
圖3 機爐協調系統的輸出數據
3.2 CCS指令模式下的仿真
CCS指令模式下電廠控制任務是跟蹤汽包壓力和控制輸出功率在預期工作點,同時保證汽包水位正常。為快速響應負荷,CCS同時向鍋爐和汽輪機發出指令,協調兩者控制系統的工作狀態。該指令多為階躍變化,使系統可以盡可能地發揮機組的調頻和調峰能力,穩定機組運行參數。
筆者同時進行了兩種仿真,分別為數據驅動子空間預測控制和基于子空間模型的多模型預測控制,其仿真結果見圖4和圖5。
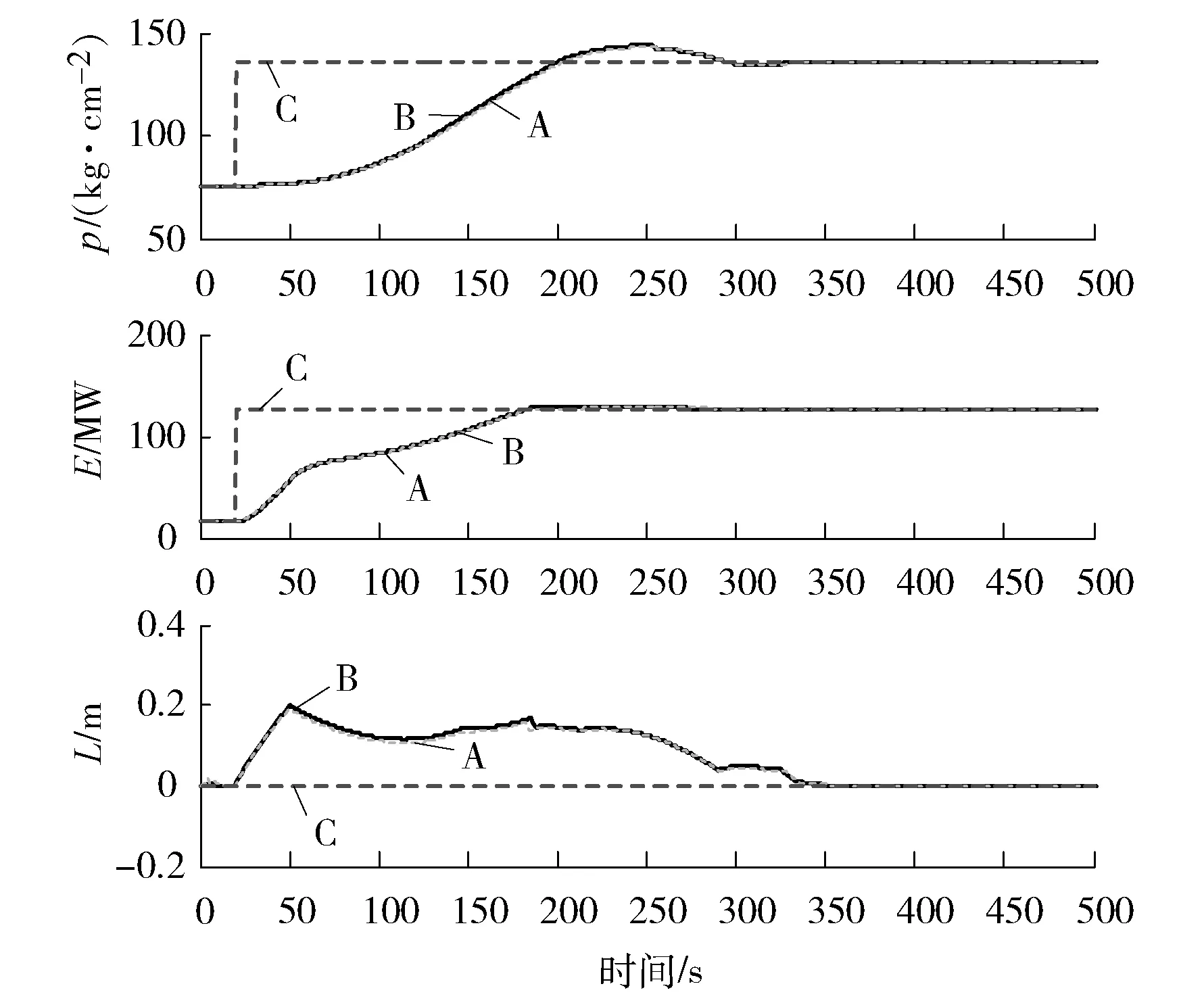
A—數據驅動子空間預測控制;B—基于子空間模型的多模型預測控制;C—參考值。
圖4 在CCS方式下鍋爐機組的輸出變量性能

A—數據驅動子空間預測控制;B—基于子空間模型的多模型預測控制。
圖5 在CCS方式下鍋爐機組的輸入變量性能
圖4反映出兩種控制方法的仿真性能很接近。雖然兩種控制方法有著非常接近的控制效果,然而多模型預測控制需要預先知道系統的非線性模型,再通過整合多個局部近似線性模型,從而設計控制器,故該方法的應用受到限制。此外,基于子空間模型的多模型預測控制,需要額外計算局部狀態空間模型及卡爾曼濾波器增益設計,還需要把多個局部線性模型轉化到共同的基下,從而得到整體的多模型控制系統,這些都使得該方法比直接數據驅動的方法計算的數據多,而本身機組控制系統計算數據量就很大。而數據驅動的子空間預測控制只需要知道輸入輸出數據就可以實現預測控制,避免了模型失配的影響,可以被簡單靈活地應用于不同對象,在不清楚機組模型的情況下可以嘗試采用,以便機組控制系統進行研究或應用。
從輸入變量的仿真曲線看出:3個輸入變量主汽調節閥最先動作,可以迅速調節機組輸出功率;給水閥門開度變化最大,這是因為汽包水位跟汽水密度、蒸發率和汽包壓力等多個擾動相關,所以汽包水位的控制需要頻繁地調節給水閥門開度。但3個控制變量的波動時間不算太長并最終趨于穩定,符合熱工過程控制系統的變化規律。
然而該仿真只是表明所選擇的局部工況點附近兩種預測控制方法吻合較好,當因負荷指令變化或因煤種、天氣、加熱器性能變化等引起的變工況,即數據與設計控制器時所選擇的工況不匹配的情況下,采用局部數據驅動子空間預測控制方法的效果將會打折扣。
4 結語
針對熱力發電廠機爐協調系統進行了數據驅動子空間預測控制的方法研究和局部工況區間的仿真驗證,并與基于子空間的多模型預測控制策略進行了比較。仿真結果證明了數據驅動子空間預測控制的可行性和有效性,即只考慮最重要的控制變量和被控變量而不考慮其他擾動時,數據驅動的子空間預測控制可以跟隨負荷指令變化,平穩地達到期望值,且閥門調節開度被約束在指定范圍內。值得關注的是,數據驅動所提出的建模和控制方法非常靈活,可以容易地適應其他類型的系統,而不需要精確地知道機組具體的數學模型,這也是它最大的優點。如果要實現數據驅動子空間預測控制在機爐協調系統全局工況內的應用,還需要進一步研究補充控制器在不同工況區間的過渡控制方法,以使控制器的控制性能達到最優。
[1] DIMEO R, LEE K Y. Boiler-turbine control system design using a genetic algorithm[J]. IEEE Transactions on Energy Conversion, 1995, 10(4): 752-759.
[2] WU X, SHEN J, LI Y G, et al. Stable model predictive control based on TS fuzzy model with application to boiler-turbine coordinated System[C]//Proceedings of the 2011 50th IEEE Conference on Decision and Control and European Control Conference (CDC-ECC). Orlando, FL: IEEE, 2011: 2981-2987.
[3] WU J, NGUANG S K, SHEN J, et al. Robust H∞ infinite tracking control of boiler-turbine systems[J]. ISA Transactions, 2010, 49(3): 369-375.
[4] CHEN P C, SHAMMA J S. Gain-scheduled -optimal control for boiler-turbine dynamics with actuator saturation[J]. Journal of Process Control, 2004, 14(3): 263-277.
[5] FENG G. A survey on analysis and design of model-based fuzzy control systems[J]. IEEE Transactions on Fuzzy Systems, 2006, 14(5): 676-697.
[6] VAN OVERSCHEE P, DE MOOR B. A unifying theorem for three subspace system identification algorithms[J]. Automatica, 1995, 31(12): 1853-1864.
[7] 吳嘯. 協調控制系統的子空間辨識及預測控制[D]. 南京: 東南大學, 2014.
[8] 楊華. 基于子空間方法的系統辨識及預測控制設計[D]. 上海: 上海交通大學, 2007.
[9] MAYNE D Q, RAWLINGS J B, RAO C V, et al. Constrained model predictive control: stability and optimality[J]. Automatica, 2000, 36(6): 789-814.
[10] WU X, SHEN J, LI Y G, et al. Data-driven modeling and predictive control for boiler-turbine unit[J]. IEEE Transactions on Energy Conversion, 2013, 28(3): 470-481.
StudyonSubspacePredictiveControlDrivenbyThermalEngineeringProcessData
Jing Yajie, Zhu Xiaoliang
(School of Energy and Environment, Southeast University, Nanjing 210096, China)
2016-10-13;
2017-01-10
國家自然科學基金項目(51076027)
景亞杰(1993—),男,在讀碩士研究生,研究方向為熱工過程測量與自動化控制。
E-mail: 2582664065@qq.com
TK321
A
1671-086X(2017)05-0315-06
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56