一種新的激光捷聯慣導系統級溫度補償方法
2017-10-11 13:11:47陶彧敏唐百勝雷旭亮陸煜明王媚嬌
導航與控制 2017年5期
關鍵詞:模型
陶彧敏,唐百勝,雷旭亮,陸煜明,王媚嬌
(1.北京航天時代激光導航技術有限責任公司,北京100094;2.海軍駐北京地區導彈配套設備軍事代表室,北京100854)
一種新的激光捷聯慣導系統級溫度補償方法
陶彧敏1,唐百勝2,雷旭亮1,陸煜明1,王媚嬌1
(1.北京航天時代激光導航技術有限責任公司,北京100094;2.海軍駐北京地區導彈配套設備軍事代表室,北京100854)
激光捷聯慣導工作時,慣組內的溫度會隨著時間不斷升高,引起慣性器件標度因數和零偏的變化,從而無法滿足慣組在全溫范圍內工作。因此,有必要采取相應措施來減少溫度帶來的誤差。提出一種通過3次樣條插值法建立初始模型,不斷迭代計算模型偏差修正樣條曲線的方法,確立激光陀螺和石英撓性加速度計的溫度誤差模型存入DSP中,最終由導航計算機實現慣組輸出的實時補償。通過標定和靜態通電驗證了模型的正確性和重復性,為進一步提高慣導精度奠定了基礎。
慣性導航系統;溫度誤差補償;樣條插值;迭代
Abstract:In the practical work of inertial navigation,the temperature in IMU will rise with time,which lead to the scale factors and bias make change,it cannot work well in the whole temperature range.So it is necessary to take corre?sponding measures to reduce temperature errors.This paper presents a new method which build initial model by spline in?terpolation and establish the temperature error model of laser gyro and accelerometer in DSP by calculating the deviation of model to correct spline curve,and finally realize real?time compensation by computer.The correctness and repeatability of the obtained temperature model are verified by the compensated INS multiple calibrating and static working,which will lay the foundation for the further improvement of the precision of INS.
Key words:inertial navigation system;temperature error compensation;spline interpolation;iteration
0 引言
近年來,捷聯慣性導航廣泛應用于航天、航空、航海等諸多領域,而溫度的影響一直制約著慣性導航精度的提高[1]。目前,常對慣性器件采用溫度控制、溫度補償以及溫度控制結合溫度補償3種方式來減弱溫度對慣性導航精度的影響。這3種方式各有優缺點,但隨著計算機技術的不斷發展以及對慣性導航啟動時間和成本的要求越來越高,采用溫度模型辨識、軟件實時補償逐漸成為主流方法[2?5]。
本文針對激光陀螺和石英撓性加速度計組合體的誤差模型建立,提出一種由樣條插值建立初始模型。通過不斷迭代計算模型的偏差修正樣條曲線,最終確立模型的新方法,由導航計算機實現實時補償,這能更好地反映慣組實際工作時的溫度特性,也更能貼合慣組的實際工作情況。
1 激光捷聯慣組輸出特性
1.1 測量誤差模型
激光陀螺測量誤差模型為:
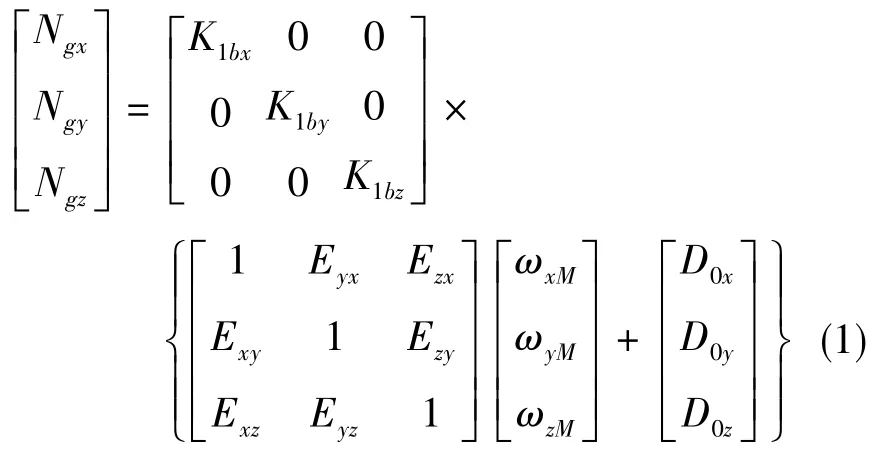
其中,Ngx、Ngy、Ngz為陀螺儀輸出的脈沖,K1bx、K1by、K1bz為陀螺儀變換系數,D0x、D0y、D0z為陀螺儀零次項漂移,ωxM、ωyM、ωzM為慣組測量坐標系中三軸的角速度分量,Eyx、Ezx、Exy、Ezy、Exz、Eyz為陀螺儀相對慣性坐標系的安裝誤差。
加速度計測量誤差模型:

其中,Nax、Nay、Naz為加速度計輸出的脈沖,Kaxp、Kayp、Kazp為加速度計標度因數,K0x、K0y、K0z為加速度計零次項漂移,AxM、AyM、AzM為慣組測量坐標系中三軸的視加速度分量,Eaxy、Eaxz、Eayz為加速度計安裝誤差。
慣性器件受溫度的影響主要表現在溫度變化、溫度梯度和溫度變化率上。本文采用的激光捷聯慣組結構緊湊、受熱均勻,溫度梯度和溫度變化率的影響較小,加上采用的溫度補償型I/F轉換電路受溫度影響小,激光陀螺的標度因數全溫范圍內變化不到2×10-6,因此只須針對陀螺零偏、加速度計的零偏和標度因數與溫度進行建模補償。
1.2 溫度補償模型概述
慣組內激光陀螺和加速度計均內置測溫傳感器PT1000實時采集溫度。現將慣組放入溫箱在-20℃下保溫6h后,上電啟動標定,溫箱以0.1℃/min升溫速率升至45℃后保溫,采集每次的標定結果、原始脈沖和溫度。陀螺零偏、加速度計標度因數和零偏與溫度的關系曲線如圖1所示,可以看出陀螺的零偏、加速度計的零偏和標度因數與溫度有明顯的相關性和趨勢項,可進行建模補償。
目前常采用曲線擬合法建立模型,即尋找能最好表現帶噪聲測量數據的平滑曲線,但不要求擬合曲線穿過所有測量點。因此實際建模中,曲線擬合有許多局限性,容易漏掉重要的測量點。而樣條插值不同,是在認定基準數據完全正確的情況下,平滑地估算出基準數據之間其他點的函數值。相較于分段擬合來說,其曲線光滑,分段銜接處連續可導。結合陀螺和加速度計的輸出特性,現采用3次樣條插值法建立初始模型逐步迭代,通過增加多項式段數逼近最終模型。如圖1所示,可設初始樣條曲線大區間為-20℃~68℃,40℃之前輸出特性明顯,可設每10℃一個小區間,40℃~68℃每4℃為一個小區間,共13段。每段都是由一個K=a0+a1T+a2T2+a3T3的 3次插值多項式組成,內節點處連續可導。
2 激光捷聯慣組溫度補償設計
激光捷聯慣組溫度補償建模步驟如下:
1)根據陀螺和加速度計標定得到的參數與溫度,基于3次樣條插值建立樣點數據與溫度的初始模型。
2)利用初始模型對慣性導航的標定數據進行離線補償,利用補償后的數據重新計算各項參數,再次建立溫度誤差模型,將兩模型進行疊加,得到新的模型并存入DSP中。
3)采集慣組實時補償后的標定數據,計算標定結果與其均值的偏差,以滿足指標的1.5×10-5為限,將超過偏差的點對曲線插值,通過增加多項式的段數來提高樣條曲線的精度,確立最終的溫度誤差模型。
現以X軸加速度計的標度因數Kaxp舉例說明,第1步、第2步后得到樣條曲線如圖2所示,采集慣組實時補償后的標定數據,計算與均值的偏差如圖3 所示。在 [20,30]、[30,40]、[64,68]3段區間內均有跳點,針對超差點再次插值,在25℃、32℃、66℃、67℃處增加多項式段數,重新規劃原來的3段區間為[20,25]、[25,30]、[30,32]、[32,40]、[64,66]、[66,67]、[67,68]7段并生成新的樣條曲線,重復該過程,直到達到精度要求,得到最終的溫度誤差模型。
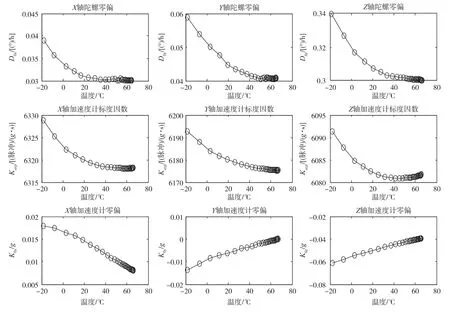
圖1 各參數與溫度的關系Fig.1 Relationship between parameters and temperature
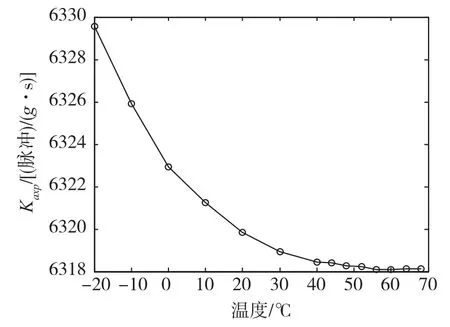
圖2 X軸加速度計標度因數樣條曲線Fig.2 Spline curve ofX?axis accelerometer's scale factor
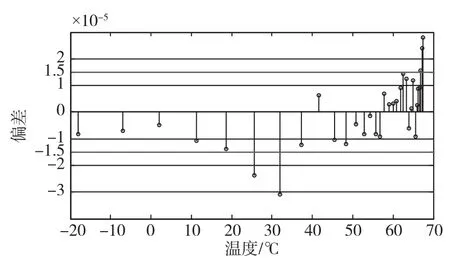
圖3 樣條偏差曲線Fig.3 Deviation curve of spline
加速度計和陀螺溫度誤差模型確立后,實現實時補償方法如圖4所示。
利用模型計算出當前溫度下對應的零偏和標度因數,將陀螺和加速度計實測脈沖分別代入下式中,計算得到補償后的脈沖直接輸出。

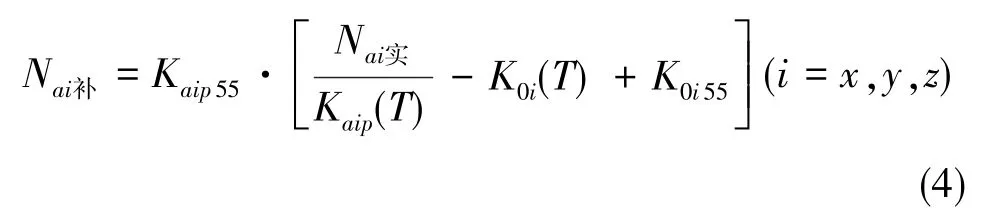

圖4 系統級的溫度誤差補償方法Fig.4 Compensation method of system?level temperature error
其中,Kaip55、K1bi55為55℃下的加速度計和陀螺標度因數,K0i55、D0i55為55℃下的加速度計和陀螺零偏,Nai實、Ngi實為慣組實際輸出的加速度計和陀螺脈沖,Nai補、Ngi補為補償后的加速度計和陀螺脈沖,Kaip(T)為所建立的加速度計標度因數模型,D0i(T)、K0i(T)為所建立的加速度計和陀螺零偏模型。
3 溫度補償結果驗證
為驗證激光捷聯慣組溫度補償模型的準確性,現將慣組(Z朝地)在室溫環境下靜態通電5h,慣組補償前后分兩通道輸出,互不干涉,觀察比較兩通道的輸出。為了更加直觀地觀測溫度補償前后輸出的變化,現將補償前后輸出脈沖進行100s平滑,如圖5所示,溫度補償效果比較明顯。
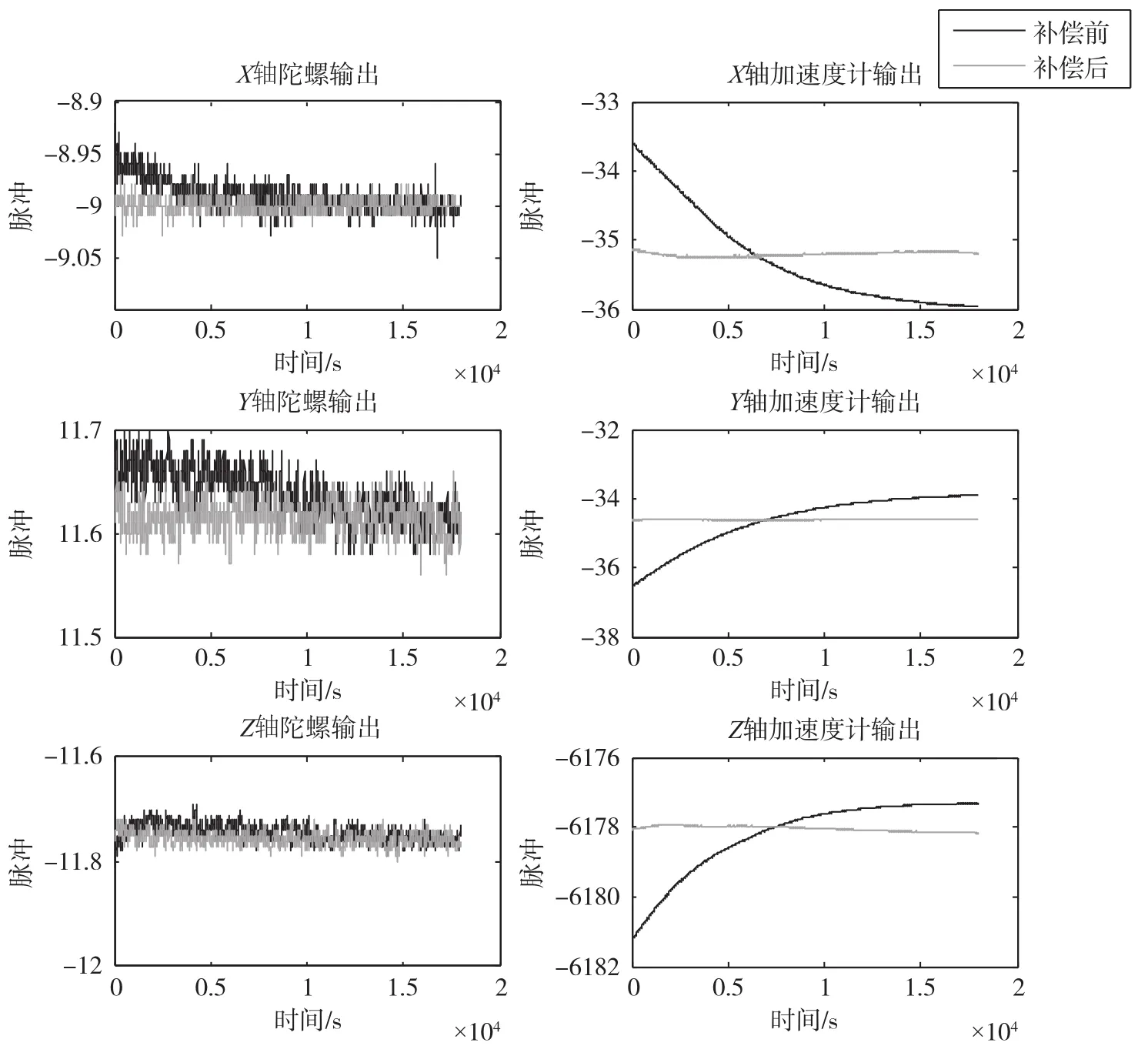
圖5 慣組輸出溫度補償前后對比Fig.5 Comparison of output before and after temperature compensation
表1給出了補償前后慣組加速度計5h靜態通電輸出穩定性對比,陀螺和加速度計輸出穩定性較補償前提高了一個數量級。
為了進一步驗證溫度補償模型的準確性和重復性,將溫度補償后的慣組進行多位置轉臺標定實驗計算各參數多次標定的穩定性與之前的標定穩定性(1σ)對比,如表2所示。
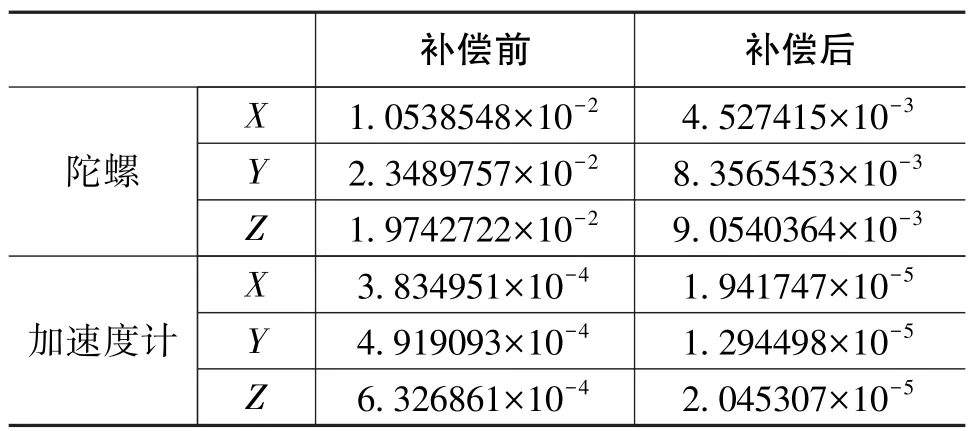
表1 補償前后慣組靜態輸出穩定性(1σ)Table 1 Stability of the static output before and after temperature compensation
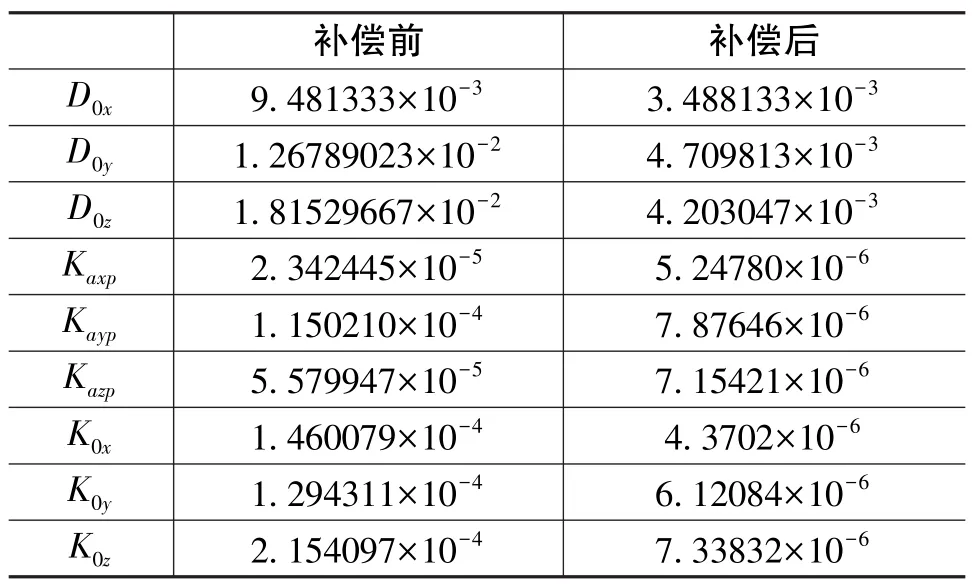
表2 補償前后標定結果穩定性對比(1σ)Table 2 Stability of calibration result before and after temperature compensation
4 結論
本文基于激光捷聯慣組提出一種簡單快速的系統溫度補償方法,通過慣組標定得到慣性器件標定諸元與溫度,首次實現樣條插值迭代修正的建模方法并對脈沖進行實時補償。實驗證明激光陀螺和加速度計的補償效果明顯,提高了慣組的測量精度和標定的穩定性,不僅可以提高慣導的精度,也可以大大縮短慣組冷態下的啟動時間,在工程應用上容易實現,方便操作。
[1]翁海娜,胡小毛,裴志.一種新的加速度計溫度誤差補償方法[J].中國慣性技術學報,2009,17(4):480?482.WENG Hai?na,HU Xiao?mao,PEI Zhi.Novel method of temperature error compensation for accelerometer[J].Journal of Chinese Inertial Technology,2009,17(4):480?482.
[2]向前.某型號激光捷聯慣組溫控溫補設計[D].國防科技大學,2010.XIANG Qian.The temperature control and compensation system for the certain laser gyro strapdown inertial meas?urement unit[D].National University of Defense Technol?ogy,2010.
[3]歐陽義國,陳興,楊建強.基于逐步回歸分析的激光慣導溫度補償研究[J].光學與光電技術,2014,12(5):60?62.OUYANG Yi?guo,CHEN Xing,YANG Jian?qiang.Research on temperature compensation ofring lasergyroscope strapdown inertial navigation system based on stepwise re?gression analysis[J].Optics&Optoelectronic Technology,2014,12(5):60?62.
[4]He H O,Zhao Z,Wang L,et al.Temperature error model?ing study for laser gyro[C].International Symposium on Instrumen?tation Science and Technology Conference,Series 48,2006:245.
[5]Titterton D H,Weston J L.Strapdown inertial navigation technology(2nd)[M].USA:American Institute of Aero?nautics and Astronautics,Inc,2004.
[6]曹平平,衛育新,李漢舟,等.激光捷聯慣導系統溫度誤差補償研究[J].導航與控制,2011,10(3):26?30.CAO Ping?ping,WEI Yu?xin,LI Han?zhou,et al.Study on temperature error compensation for laser SINS[J].Navigation and Control,2011,10(3):26?30.
[7]張鵬飛,王宇,湯建勛,等.機抖激光陀螺捷聯慣導系統的溫度補償方法[J].紅外與激光工程,2010,39(4):676?679.ZHANG Peng?fei,WANG Yu,TANG Jian?xun,et al.Methods for compensating temperature of strap?down in?ertial navigation system with mechanically dithered ring la?ser gyroscope[J].Infrared and Laser Engineering,2010,39(4):676?679.
[8]王淑娟,黃顯林,劉升才.加速度計溫度模型的辨識[J].中國慣性技術學報,1997,5(1):31?36.WANG Shu?juan,HUANG Xian?lin,LIU Sheng?cai.Iden?tification for temperature model of accelerometer[J].Journal of Chinese Inertial Technology,1997,5(1):31?36.
Novel Method of System?level Temperature Error Compensation for Laser Gyro Strapdown Inertial Navigation
TAO Yu?min1,TANG Bai?sheng2,LEI Xu?liang1,LU Yu?ming1,WANG Mei?jiao1
(1.Beijing Aerospace Times Laser Inertial Technology Company,Ltd.,Beijing 100094;2.The Navy Military Representative Office of Missile Equipment in Beijing,Beijing 100854)
U666.1
A
1674?5558(2017)01?01372
10.3969/j.issn.1674?5558.2017.05.005
2017?02?14
陶彧敏,女,碩士,精密儀器及機械專業,研究方向為新型慣性儀表。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19