慣性平臺中星敏感器安裝誤差標定方法研究
2017-10-11 13:11:56陳偉雄王立哲
導航與控制 2017年5期
關鍵詞:測量
陳偉雄,王 林,鄭 濤,王立哲
(1.中北大學儀器與電子學院,太原030051;2.北京航天控制儀器研究所,北京100039)
慣性平臺中星敏感器安裝誤差標定方法研究
陳偉雄1,王 林2,鄭 濤2,王立哲2
(1.中北大學儀器與電子學院,太原030051;2.北京航天控制儀器研究所,北京100039)
提出了一種基于星光/慣性平臺系統中星敏感器安裝誤差的地面標定方法,利用高精度的星模擬器,模擬遠處恒星,將星敏感器主光軸對準星光,通過測量恒星與平臺臺體六面體的位置坐標,經過坐標轉換后,對比得到星敏感器在慣性平臺中的安裝誤差。實驗數據表明,該方法可準確測量出星敏感器在星光/慣性平臺中的安裝誤差角,實現誤差的精確標定。
星光/慣性平臺系統;星敏感器安裝誤差標定;星模擬器
Abstract:This paper presents a star/inertial platform system of star sensor installation error calibration method based on ground.Through the use of star simulator with high precision,to simulate distant stars,the star sensor on axis star point.The position coordinate measuring platform for stars and hexahedron,through coordinate conversion,and comparing them to get the installation error of star sensor in the inertial platform.The experimental results show that the method can ac?curately measure the installation error angle of the star sensor in the star/inertial platform system,and realize the accurate calibration of the error.
Key words:starlight/inertial platform system;star sensor installation error calibration;star simulator
0 引言
當前,在自主導航領域,星光/慣性組合導航技術在國內外一直受到廣泛重視,它具有自主性強、抗干擾能力強、導航精度高、修正慣導誤差等優點,已成為各國發展航空航天自主導航的關鍵技術[1]。
星敏感器是星光/慣性平臺系統中核心敏感部件之一,安裝于平臺的臺體上,測量恒星在星敏感器測量坐標系中的矢量,為姿態解算提供數據。星敏感器在慣性平臺系統上的安裝誤差是星敏感器關鍵的系統參數,在經過標定補償后,用于修正慣性系統的漂移誤差,提高制導精度[2]。因此,星敏感器的測量精度直接影響著星光/慣導系統的導航精度。
目前,現有的地面標定方法主要有兩種:一是基于慣導對準的安裝誤差標定方法,該方法直觀、簡單、便于實現和操作,缺點是受制于慣導的對準精度;二是基于光學原理的安裝誤差標定方法,精度高,但對設備要求高[3]。因而,尋求精確、高效的星敏感器安裝誤差標定方法,對于提高星敏感器對慣導系統的修正精度有不可估量的作用。
本文提出了一種在高精度星模擬器輔助下的星敏感器安裝誤差標定方法,在慣性平臺系統精準對星的條件下,測量星點與平臺六面體的坐標,它們的差值表征了星敏感器在慣性平臺中的安裝誤差。實驗數據表明,該方法提高了測量精度,有效提高了星敏感器在星光/慣性平臺系統中的安裝誤差標定精度。
1 標定原理
星敏感器在星光/慣性平臺系統上依靠標準六面體作為安裝基準,通過星敏感器與六面體的位置偏差來表示星敏感器坐標系與平臺坐標系之間的誤差關系,如圖1所示。
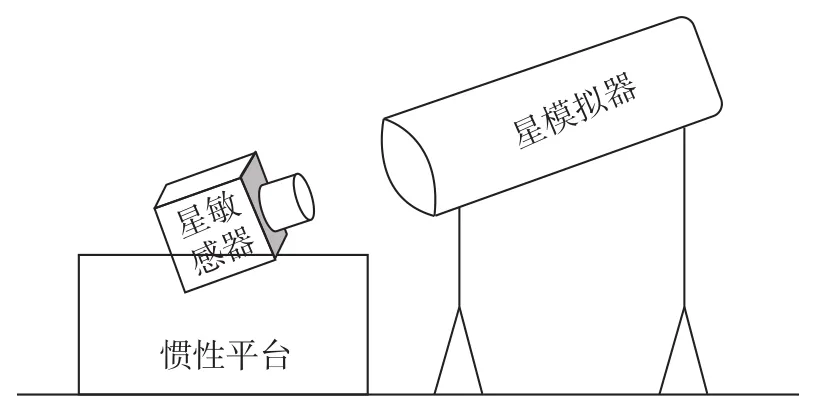
圖1 標定方法示意圖Fig.1 Schematic diagram of calibration method
通過星光/慣性平臺系統的斜置對星指令,星敏感器的主光軸精確對準模擬星點,使星光和星敏感器主光軸重合,此時星點與星敏感器主光軸坐標位置相同。利用光電經緯儀測量星光、平臺六面體的大地坐標,它們的差值就代表了星敏感器繞平臺方位、俯仰方向上的安裝誤差角。星點位置經過平臺坐標系、星敏感器坐標系轉換,可得到星光在平臺坐標系中的理論位置,與星點在星敏感器坐標系中的位置進行比對,可計算出星敏感器繞光軸方向的安裝誤差角。
2 標定方案
星模擬器是星敏感器的主要地面標定設備,在地面模擬星空的星點,該試驗中所用的星模擬器可提供Φ2°的星圖視場,星間夾角精度3σ≤1.5″,能夠為星敏感器提供標準的星點測試信號。
將星光平臺和星模擬器放在水平穩定基準上,星模擬器固定安裝在-8°(取矢量上仰為正)支架上。調整二者的相對位置和測量光路,使星模擬器射出光線能夠在星敏感器視場中成像,如圖2所示。
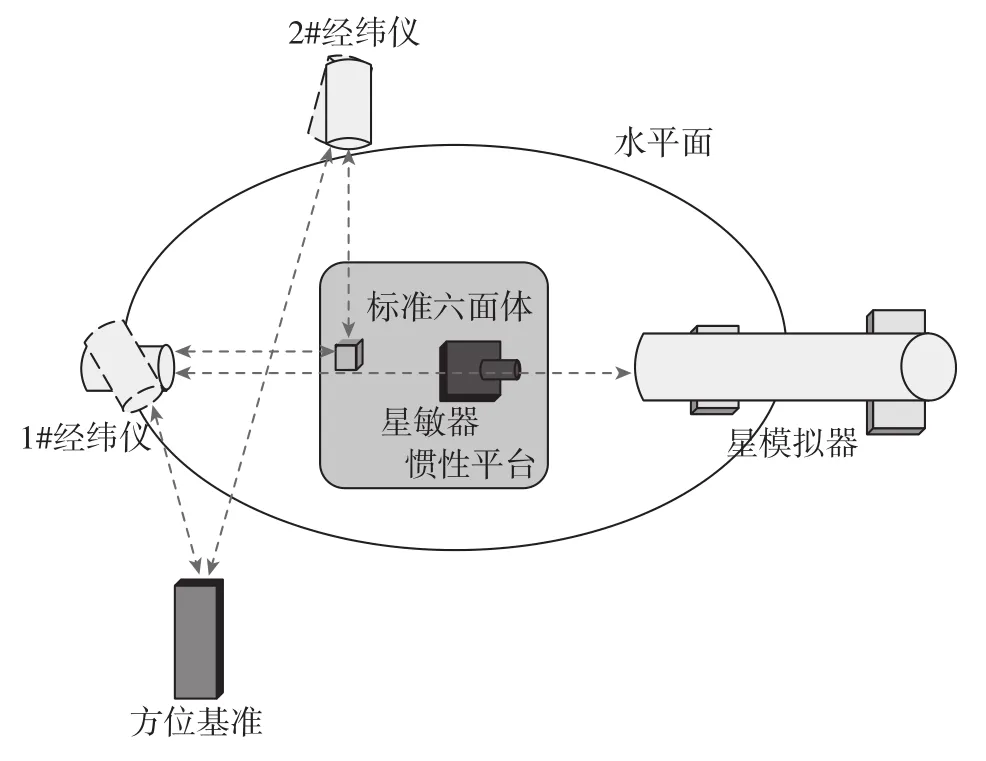
圖2 星敏感器安裝誤差測試原理圖Fig.2 Test schematic of star sensor installation error
將星模擬器光源調整為單星點的工作模式,星點設置為可見光2等星,利用高精度光學經緯儀測量星模擬器射出的星點相對于實驗室方位基準的方位角σs以及俯仰角es,將星點在地理坐標系中的坐標化為單位矢量:

在星光/慣性平臺穩定3min后進行星光觀測,星敏感器根據同步信號測星,通過軟件采集2min星敏感器返回的測星數據。根據星敏感器的坐標輸出,通過平臺斜調平,將星點在星敏感器中的坐標控制在(0,0)左右,位置偏差在10-4左右的量級。此時,星光與星敏感器主光軸坐標位置一致。
此時,保持臺體斜置姿態不變,用兩臺經緯儀測定平臺臺體六面體當前姿態,如圖3所示。用1號經緯儀測量平臺六面體ypOzp平面法線(Xp軸)相對于水平坐標系的高低角epx,用2號經緯儀測量平臺六面體xpOyp平面法線(Zp軸)相對于水平坐標系的高低角epz和方位角σ1,并用經緯儀測量方位基準鏡的方位角σ0,得到平臺六面體Zp軸相對于方位基準鏡的方位角σpz=σ1-σ0,并記錄測試數據。此時,ypOzp平面法線(Xp軸)相對于方位基準鏡的方位角為:

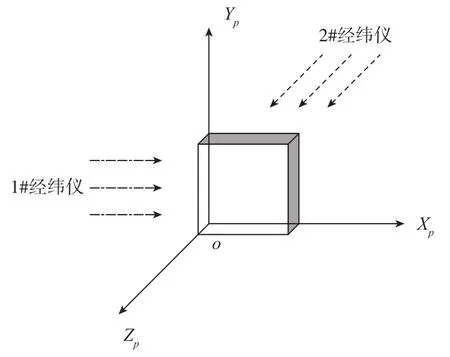
圖3 平臺六面體姿態測定示意圖Fig.3 Schematic diagram of platform attitude determination of hexahedron
重復3組測試,記錄經緯儀測量六面體的方位角與俯仰角數據。
3 計算方法
由于星模擬器是以-8°(取矢量上仰為正)安裝在支架上,因此在計算俯仰偏差時,需要進行抵消。同時,當星模擬器中星點位置存在誤差時,應予以消除。
方位偏差滿足:

俯仰偏差滿足:

星敏感器測量坐標系如圖4所示。原點Os為鏡頭光軸與光敏感器件成像平面的交點,OsXs為光軸方向,OsYs向上為正,OsZs按照右手定則確定,OsYsZs為光敏感器件成像平面。
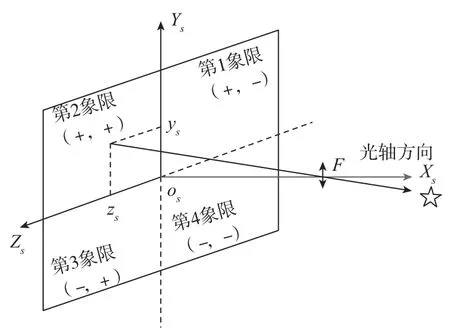
圖4 星敏感器測量坐標系及極性定義Fig.4 Measurement coordinate system and polarity definition of star sensor
星敏感器輸出(θy,θz),表示恒星矢量在OsYsZs平面內的成像信息。其中,θy=∠YsFOs,θz=∠ZsFOs,單位為(°)。
則星點坐標(θy,θz)化為單位矢量為:
考慮到平臺六面體的正交性,可得:yp=zpi·xpi。則平臺坐標系與地理坐標系之間的轉換矩陣為:
其中,c11=cose1·cosσ1;c12=sine1;c13=cose1·sinσ1;c21=cose1·sine2·sinσ1-sine1·cose2·sinσ2;c22=cose1·cose2·sin(σ2-σ1);c23=sine1·cose2·cosσ2-cose1·sine2·cosσ1;c31=cose2·cosσ2;c32=sine2;c33=cose2·sinσ2。
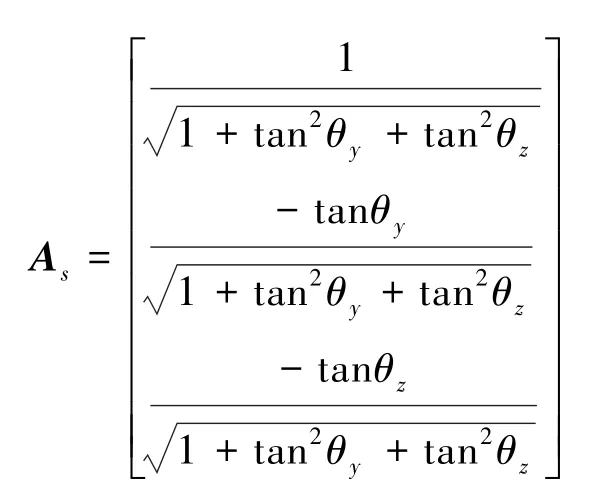
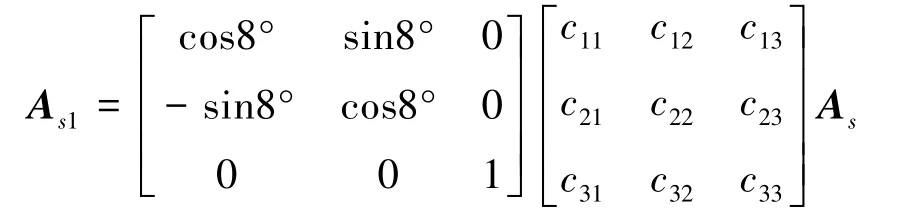
由于星敏感器與平臺臺體軸有8°俯仰角,因此星模擬器在星敏感器標準坐標系下的矢量坐標為:
如圖5所示,設星敏感器測量星點的理論坐標為(y1,z1),實際坐標為(y2,z2),滿足以下關系:
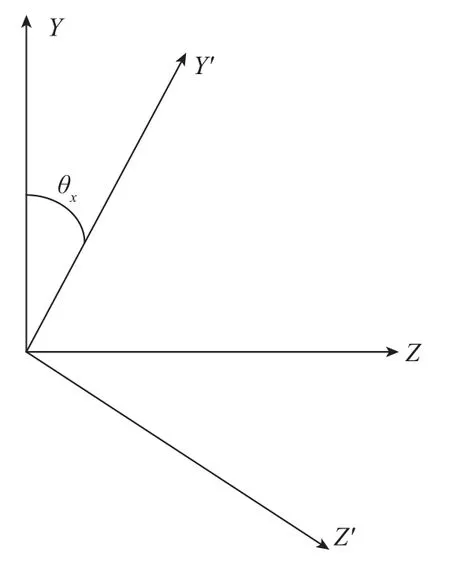
圖5 星敏感器繞X軸的坐標變換示意圖Fig.5 Coordinate transformation of star sensor aroundXaxis
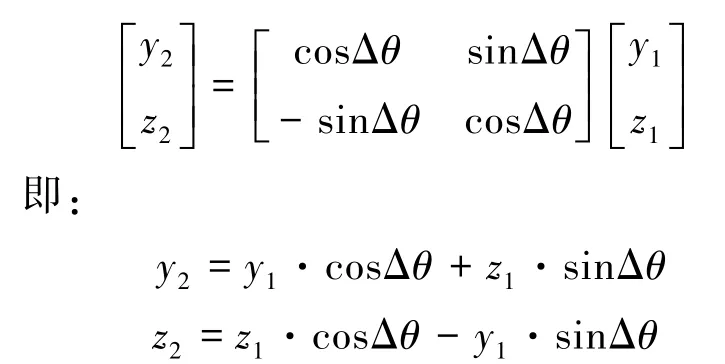
由于Δθ為小角度,所以公式可近似為:
經過解算可得星敏感器繞光軸偏差Δθ為:

其中,(y2,z2)為星點在星敏感器中心點的實際測量坐標,(y1,z1)為矢量AS1中在Ys、Zs軸上的坐標。
4 試驗數據及分析
按照測試方法,分別測量1組星點位置、3組平臺六面體位置的數據,對所得的結果進行計算分析。測試數據如表1、表2所示。
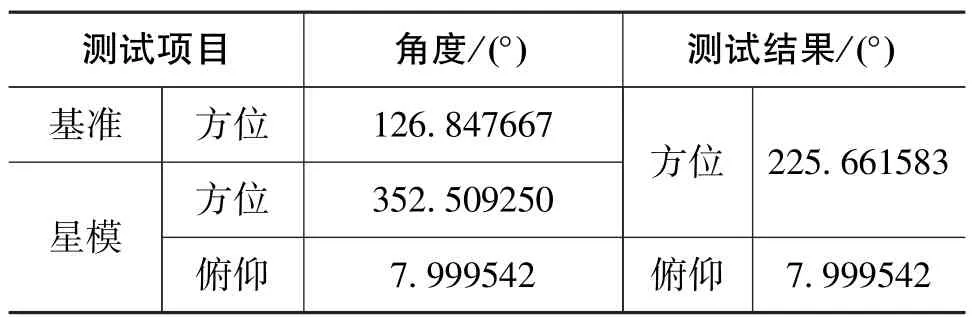
表1 星模擬器姿態Table 1 Star simulator attitude
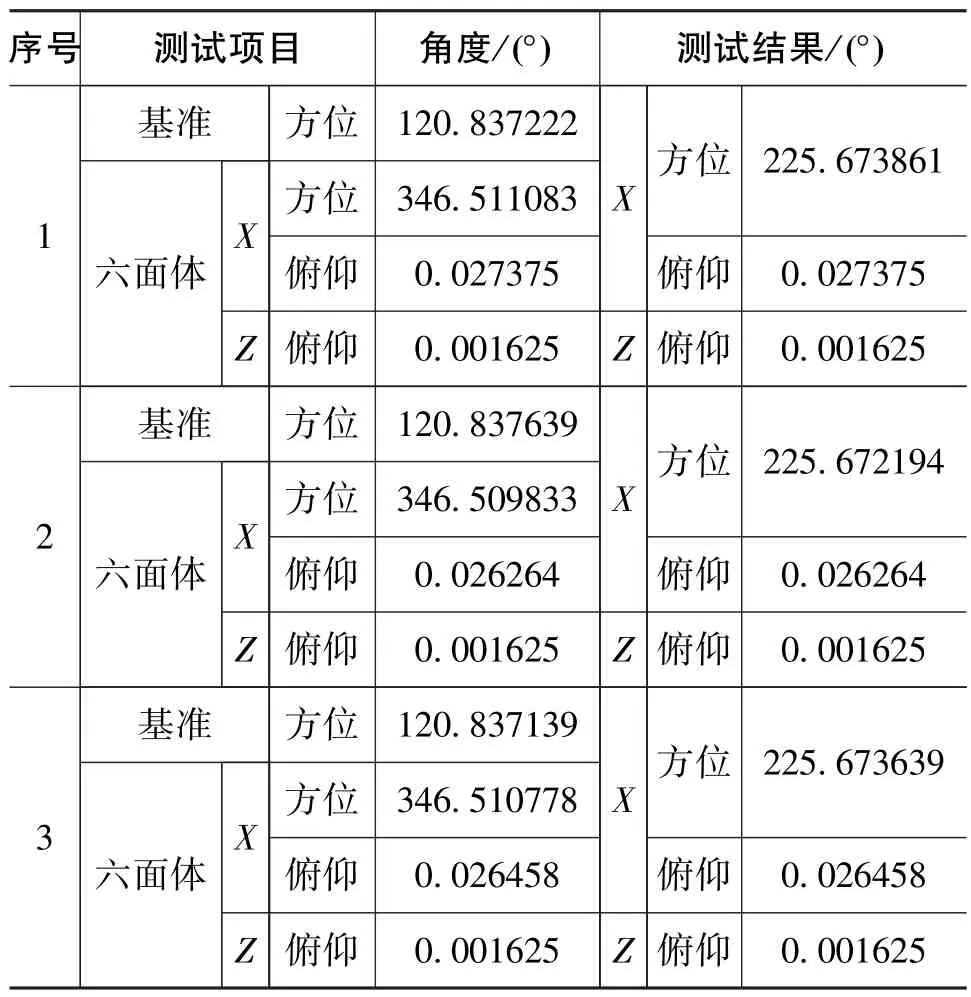
表2 平臺六面體姿態Table 2 Hexahedral platform attitude
按式(1)~式(3)進行計算,得到如表3所示結果。
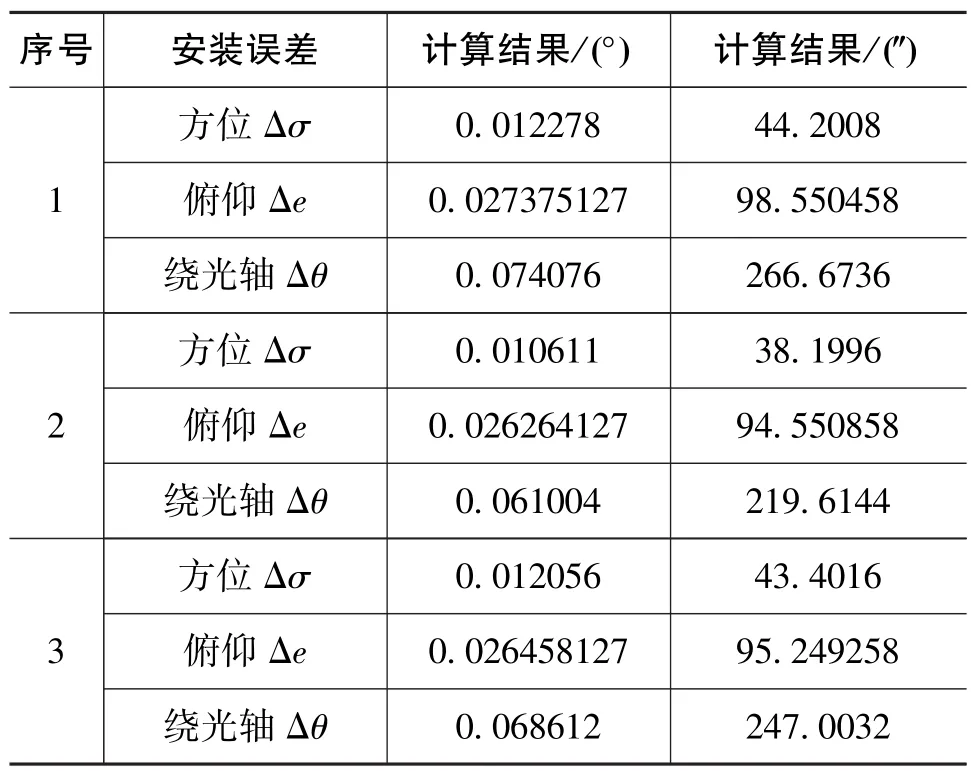
表3 計算結果Table 3 Calculation results
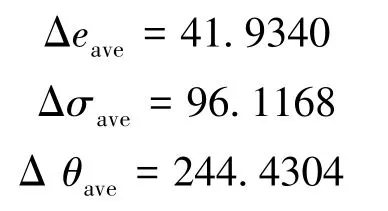
計算3組平均值(單位:(″)),可得:
將該結果與裝配所得的星敏感器安裝誤差真值進行對比,如表4所示。
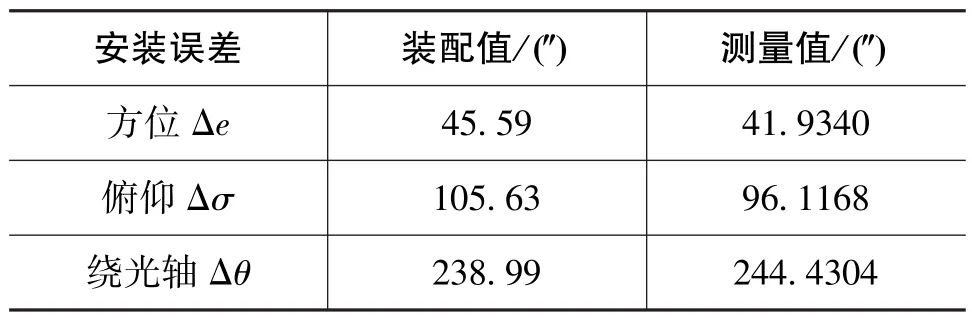
表4 測試結果對比Table 4 Comparison of test results
通過試驗數據的分析可以看出,通過該方法的測試,能夠準確地測量出星敏感器在三軸方向上的安裝誤差,測試數據與當前測量結果一致,證明了該方法的可行性。除此之外,該方案簡捷高效,可快速計算出誤差結果,測試效率較高,節省了測試時間。
5 結論
本文提出的星光/慣性平臺中星敏感器安裝誤差單星測量方案,利用了星點位置在星敏感器坐標系中以橫、縱坐標形式呈現的特點,將星敏感器精確對準星點,使坐標基本呈現為(0,0)。用星點的位置替代了星敏感器的位置,從而通過比較星點和六面體在實驗室坐標系中的偏差,直接解算出星敏感器在方位、俯仰上的安裝誤差。通過坐標轉換計算,將星敏感器輸出、星點理論位置信息統一到星敏感器坐標系中,對比得出星敏感器繞光軸的偏差。實驗證明,該方法誤差測試精度好,測試效率較高,能有效提高星敏感器測量精度,實現對慣導平臺的精確修正。
[1]梁斌,朱海龍,張濤,等.星敏感器技術研究現狀及發展趨勢[J].中國光學,2016,9(1):16?29.LIANG Bin,ZHU Hai?long,ZHANG Tao,et al.Research status and development tendency of star tracker technique[J].Chinese Optics,2016,9(1):16?29.
[2]王融,熊智,劉建業,等.一種星敏感器安裝誤差標定模型仿真研究[J].系統仿真技術,2013,9(4):287?291+298.WANG Rong,XIONG Zhi,LIU Jian?ye,et al.Study on in?stallation error calibration model simulation of star sensor[J].System Simulation Technology,2013,9(4):287?291+298.
[3]王小龍,張國玉,孫高飛,等.基于星模擬器綜合誤差的星點修正方法的研究[J].長春理工大學學報,2015,38(2):36?38+42.WANG Xiao?long,ZHANG Guo?yu,SUN Gao?fei,et al.Star correction method based on the comprehensive error of star simulator[J].Journal of Changchun University of Science and Technology,2015,38(2):36?38+42.
[4]李留建,王明海,許立軍,等.單星方案確定平臺誤差角研究[J].彈箭與制導學報,2009,29(6):41?44.LI Liu?jian,WANG Ming?hai,XU Li?jun,et al.Study of determine angle error of platform with single?star scheme[J].Journal of Projectiles,Rockets,Missiles and Guidance,2009,29(6):41?44.
[5]毛玉良,代潔,楊葉,等.單星模雙位置星慣組合安裝誤差標定技術[C].中國慣性技術學會第七屆學術年會論文集,2015(29):104?107.MAO Yu?liang,DAI Jie,YANG Ye,et al.Star sensor in?stallation error calibration technique with single star simu?lator and two?position overturning[C].Proceedings of 7thAnnual Meeting,Chinese Society of Inertial Technology,2015(29):104?107.
[6]張輝,田宏,袁家虎,等.星敏感器參數標定及誤差補償[J].光電工程,2005,32(9):1?4.ZHANG Hui,TIAN Hong,YUAN Jia?hu,et al.Parameter calibration and error compensation of star sensor[J].Opto?Electronic Engineering,2005,32(9):1?4.
[7]王常虹,夏剛,孟倩.平臺式慣性/星光組合系統斜置對準方法[J].導彈與航天運載技術,2011(1):14?17.WANG Chang?hong,XIA Gang,MENG Qian.The inclined aiming scheme of inertial?stellar integrated platform[J].Missiles and Space Vehicles,2011(1):14?17.
[8]唐君,李偉,徐軒彬.一種星敏感器光學系統標定與引建的新方法[J].紅外與激光工程,2015,44(5):1610?1615.TANG Jun,LI Wei,XU Xuan?bin.New method of star sensor's calibration and leading building[J].Infrared and Laser Engineering,2015,44(5):1610?1615.
[9]王洪濤,羅長洲,王渝,等.星敏感器模型參數分析及校準方法研究[J].電子科技大學學報,2010,39(6):880?885.WANG Hong?tao,LUO Chang?zhou,WANG Yu,et al.Star sensor model parametric analysis and calibration method study[J].Journal of University of Electronic Science and Technology of China,2010,39(6):880?885.
Research on Calibration Method of Installation Error of Star Sensor in Inertial Platform
CHEN Wei?xiong1,WANG Lin2,ZHENG Tao2,WANG Li?zhe2
(1.School of Instrument and Electronics,North University of China,Taiyuan 030051;2.Beijing Institute of Aerospace Control Devices,Beijing 100039)
U666.1
A
1674?5558(2017)03?01361
10.3969/j.issn.1674?5558.2017.05.012
2017?01?05
陳偉雄,男,碩士,測試計量技術及儀器專業,研究方向為慣性器件裝配及測量技術。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00