數模轉換器毛刺對光纖陀螺相關檢測的影響分析
2017-10-11 13:11:54丁江婷
導航與控制 2017年5期
關鍵詞:信號
丁江婷,潘 雄,張 輝
(1.北京航空航天大學儀器科學與光電工程學院,北京100191;2.西安現代控制技術研究所,西安710065)
數模轉換器毛刺對光纖陀螺相關檢測的影響分析
丁江婷1,潘 雄1,張 輝2
(1.北京航空航天大學儀器科學與光電工程學院,北京100191;2.西安現代控制技術研究所,西安710065)
數模轉換器(DAC)是全數字閉環光纖陀螺反饋通道的重要部件,DAC的毛刺特性會對光纖陀螺的調制解調結果產生影響。基于DAC中值毛刺特性建立了光纖陀螺反饋回路的非理想調制方波模型,分析了調制頻率與本征頻率不同時DAC毛刺在干涉信號中產生的各類周期干擾信號。利用周期干擾信號的Fourier級數推導出了DAC毛刺造成調制解調誤差的數學模型,仿真分析了數模轉換器毛刺的寬度、高度,光纖陀螺調制頻率、本征頻率及放大電路的增益帶寬對陀螺解調誤差的影響。最后,通過開環實驗驗證了DAC毛刺對光纖陀螺調制解調的影響。
光纖陀螺;DAC毛刺;調制誤差;調制頻率;本征頻率
Abstract:Digital to analog converter(DAC)is an important part of all digital closed?loop fiber optic gyroscope(FOG)feedback loop,DAC glitch will affect the result of modulation and demodulation of IFOG.The model of non?ideal modulated square wave was built according to the characteristic of mid?scale glitch,different conditions of interference sig?nal caused by DAC glitch when the modulation frequency is not equal to eigenfrequency were analyzed.The mathematical model of modulation and demodulation errors caused by DAC glitch were formulated by applying Fourier series of periodic interference signal.Furthermore,the effects of the glitch impulse,modulation frequency,eigenfrequency and amplifier gain bandwidth on the bias error of closed?loop FOG were analyzed by simulating,and the effect of DAC glitch on modulation and demodulation was verification through open?loop experiment.
Key words:fiber optic gyroscope;DAC glitch;modulation error;modulation frequency;eigenfrequency
0 引言
中高精度干涉式光纖陀螺普遍采用全數字閉環檢測方案[1?2],反饋回路中的數模轉換器(DAC)是生成反饋調制和偏置調制的關鍵器件。高速閉環反饋與相對較低的輸出更新率使得輸出數據對閉環反饋數據有一個平均過程,降低了對DAC及其驅動運放的分辨率和線性度的要求[2]。隨著光纖陀螺研究的深入和導航應用對高動態、高數據更新率的需求,DAC的器件特性,尤其是非線性,成為影響光纖陀螺性能的一個潛在誤差源[3]。
DAC毛刺是指當輸入數字量變化時,DAC輸出端出現的尖峰脈沖[4]。毛刺的形成原因有兩個,一個是DAC內部模擬開關的導通和截至時間存在差異,另一個是受分布參數的影響造成的輸入饋送延遲。這些因素使得DAC在輸出過渡期間的某一短暫時間內,輸出端出現與輸入數據無關的模擬輸出。毛刺的大小與DAC的性能有關,且受DAC輸入數據變化位數的影響。當輸入數字量跨越DAC滿量程的中值時(如16位 DAC發生從h7FFF到h8000的跨越),模擬輸出將產生中值毛刺脈沖 (Midscale Glitch Impulse),中值毛刺通常被認為是幅度最大的毛刺[4]。
本文基于DAC毛刺特性及相關解調的原理,建立了DAC中值毛刺造成陀螺調制解調誤差的數學模型,分析了該誤差與毛刺寬度和高度、調制頻率與本征頻率的偏離程度等因素的關系,并結合調制頻率、本征頻率等影響因素,仿真計算了DAC中值毛刺對陀螺調制解調的影響。最后,對DAC中值毛刺造成的調制解調影響進行了開環實驗驗證。
1 DAC毛刺對光纖陀螺調制解調的影響建模
1.1 DAC毛刺建模
DAC中值毛刺的典型測試值如圖 1(a)所示[5?6]。由于毛刺的波形比較復雜,精確描述是十分困難的,為簡化問題,采用等寬三角形作為毛刺的平均近似數學描述[7],如圖1(b)所示。
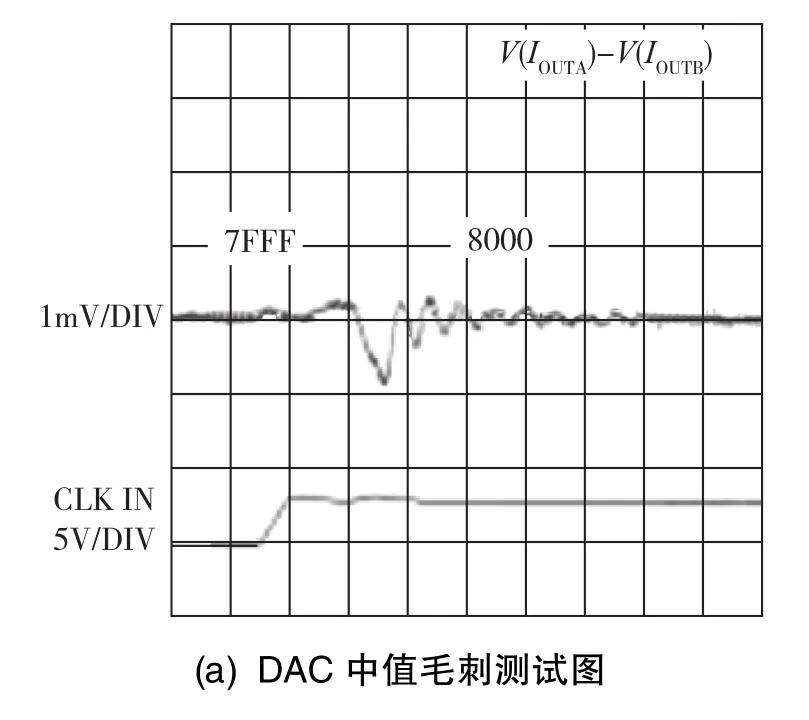
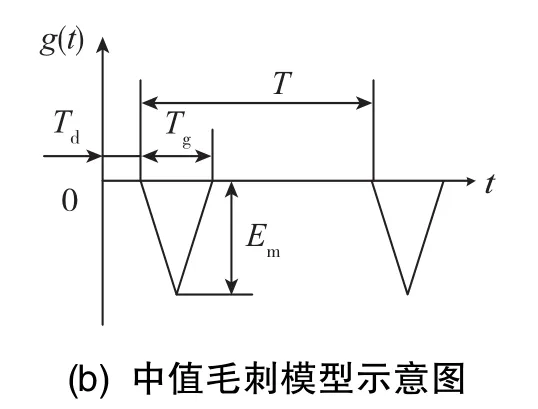
圖1 DAC的中值毛刺脈沖示意圖Fig.1 The schematic diagram of DAC midscale glitch
其中,Td為延遲時間,Tg為毛刺寬度,Em為毛刺幅度,毛刺表達式為:
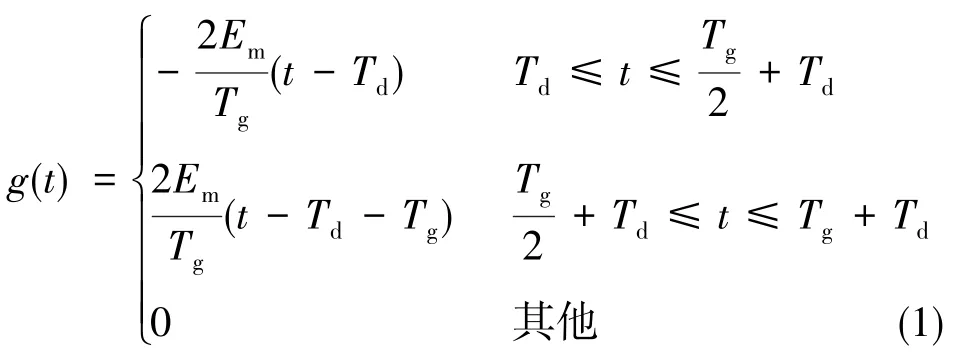
在光纖陀螺中,DAC的輸出為階梯波和調制方波的疊加,如圖2(a)所示。當16位DAC的階梯波輸出在h4000~h7FFF范圍內,疊加調制方波后的DAC輸出跨越了h7FFF~h8000,則輸出產生中值毛刺,等效于不理想調制方波與階梯波的疊加,如圖2(b)所示。
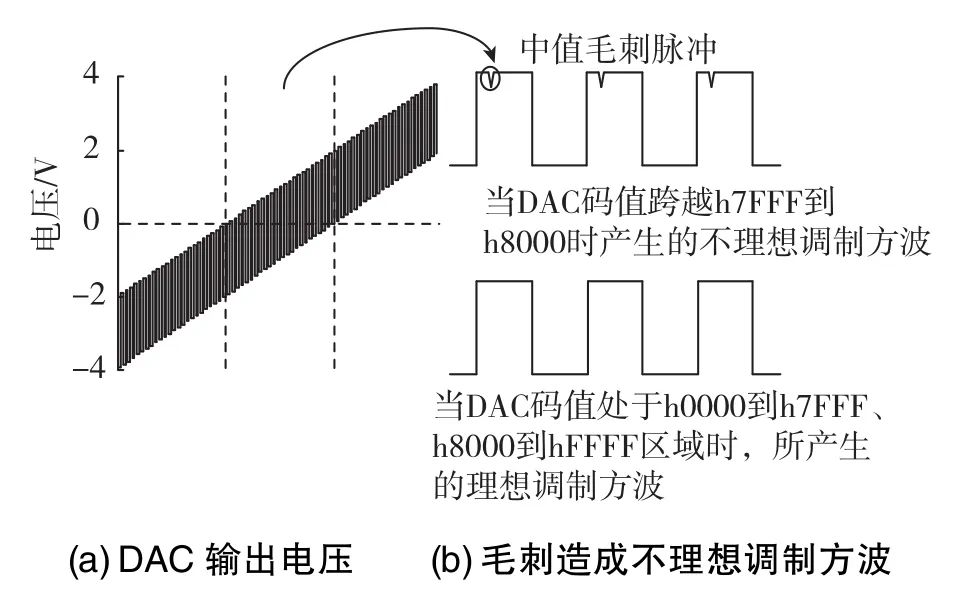
圖2 DAC輸出產生毛刺的范圍Fig.2 The range of DAC output generated glitch
1.2 DAC毛刺對調制解調的影響分析
在圖3中,Sm(t)為非理想調制方波,?m(t)、?m(t-τ)為調制相位,Δ?(t)=?m(t)-?m(t-τ)為干涉信號相位差,ΔP(t)為干涉信號中的脈沖干擾信號,Sr(t)為理想解調方波,Tm為調制方波、解調方波的周期。
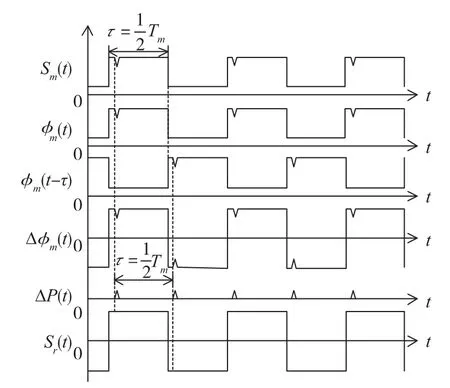
圖3 fm=fp時,DAC毛刺對調制解調的影響Fig.3 The effect of DAC glitch on modulation and demodulation whenfm=fp
由于干擾信號ΔP(t)中的三角脈沖信號在正負半周期相應出現,相位差為π,解調方波是與調制方波同頻、占空比為1∶1、幅值為±1的理想方波[8],不考慮其他非線性效應時,干擾信號經相關解調后抵消為0。
陀螺的方波偏置調制原理如圖5所示,當相位差信號Δφ在0處改變一個小角度+Δ,正弦信號在最高處變化,靈敏度最低,干涉值I=I0cos(0-Δ)≈I0,即可近似于常值,如圖5(c)中粗線部分所示。
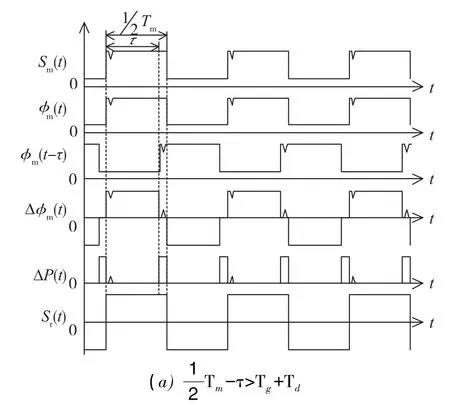
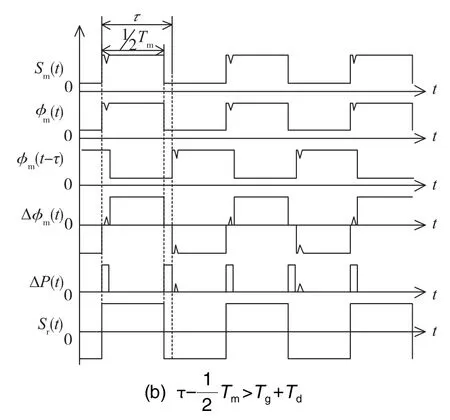
圖4 fm≠fp時,DAC毛刺對調制解調的影響Fig.4 Effect of DAC glitch on modulation and demodulation whenfm≠fp
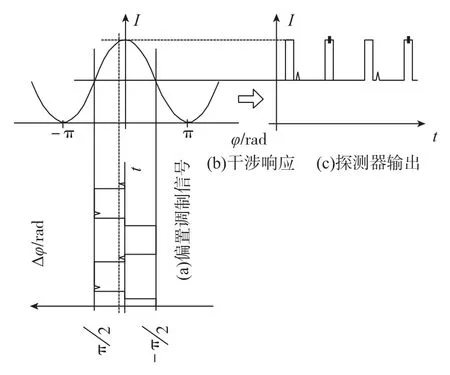
圖5 相位偏置調制原理圖Fig.5 The schematic diagram of square wave bias modulation
即當調制頻率fm與本征頻率fp不相等時,反饋回路的DAC毛刺對調制解調結果有影響。
1.3 調制解調誤差的Fourier級數模型
隨著陀螺調制頻率fm與本征頻率fp差值的改變,探測器輸出的干涉信號中產生不同形式的干擾信號ΔP(t),如圖6陰影部分所示。由于產生的方波脈沖誤差經相關解調后抵消為0,在此不予表示,只考慮三角脈沖誤差。
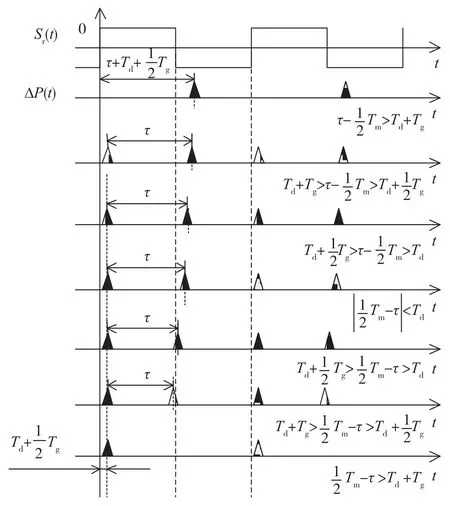
圖6 fm≠fp造成干擾信號的不同形式Fig.6 Different forms of interference signal whenfm≠fp
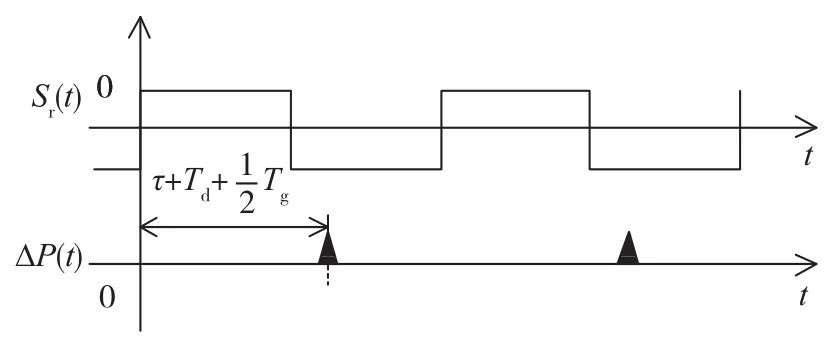
圖7 時造成的干擾信號Fig.7 The interference signal when
將干涉信號中的三角脈沖干擾信號展開為Fourier級數形式:
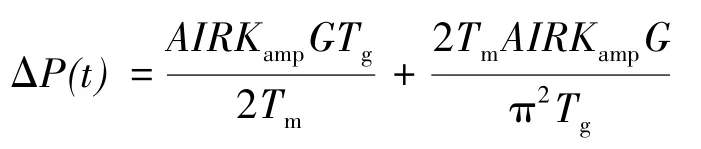

式中,I為到達探測器的光功率,AI為干涉信號中三角脈沖的高度,A為毛刺高度的比例系數;R包含探測器響應度;Kamp為前放增益,G包含AD轉換器增益與數字解調增益;φ為脈沖干擾信號的相位;M為能通過信號調理電路的最高諧波次數,M/Tm表征了信號調理電路的帶寬。當信號調理電路的參數確定后,其增益帶寬積為有限常量c,可表示為:

閉環光纖陀螺的光電轉換放大信號經過ADC轉換為數字信號后到達數字信號處理(DSP)模塊進行相關解調,數字閉環光纖陀螺采用數字解調方法,解調方波可認為是與調制方波同頻、占空比為1∶1、幅值為±1的理想方波,其Fourier級數展開式為:
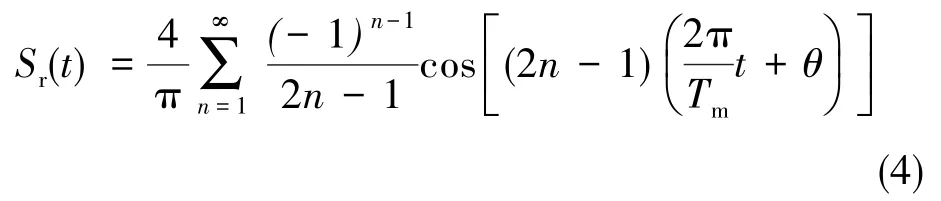
式中,θ為解調方波的相位。由于解調的本質是干涉信號與解調方波的相關,將式(2)~式(4)結合,得:
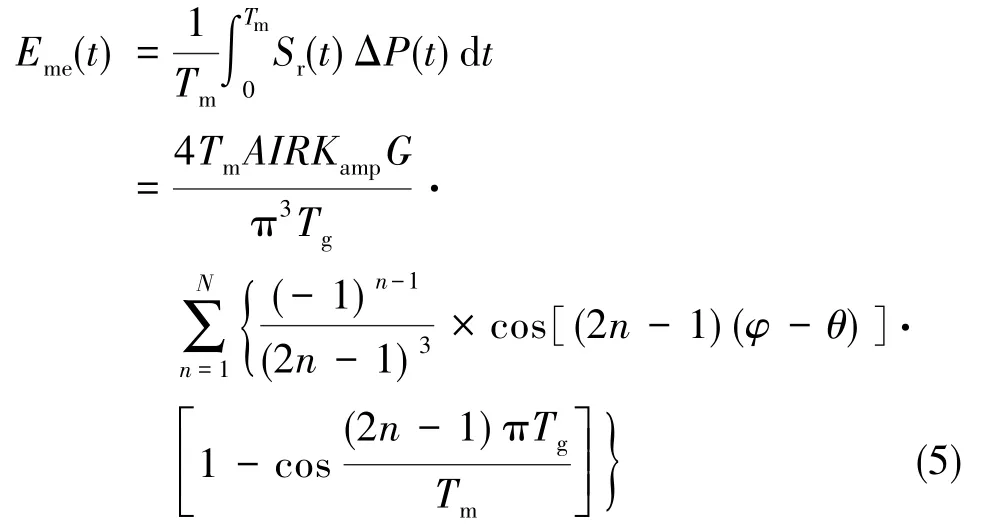
式中,Eme為DAC輸出毛刺經相關解調后造成的誤差;N可表示為:

在圖7所示情況中,有:

其他情況同理。當fm≠fp時,DAC輸出毛刺經相關解調后造成的誤差項不可能為0。
2 DAC毛刺對光纖陀螺調制解調影響的仿真結果與分析
由式(3)、式(5)和式(6)可知,DAC毛刺造成的調制解調誤差主要由參數Td、Tg、τ、Tm、M/Tm、A、φ、θ、I、R、Kamp、G決定。
仿真分析使用的初始參數值如表1所示。
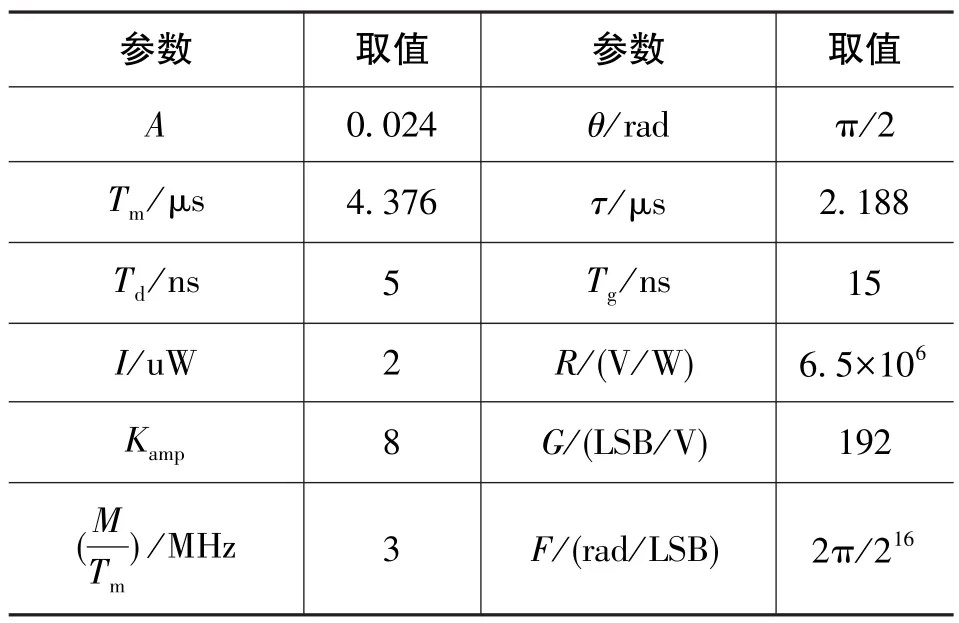
表1 仿真參數初始值Table 1 Initial value of simulation parameters
其中,Tm、I、R、Kamp、G均使用陀螺實際參數。在光纖陀螺中,Tm由電子頻率器合成,實際值與理想值存在一定偏差,并且會隨著溫度的改變發生一定變化。因此在仿真中,改變調制周期,從初始調制周期5μs向正負方向分別偏移0.1μs,即4.9μs~5.1μs,同時設置不同的毛刺寬度15ns、20ns、25ns,仿真結果如圖8所示。
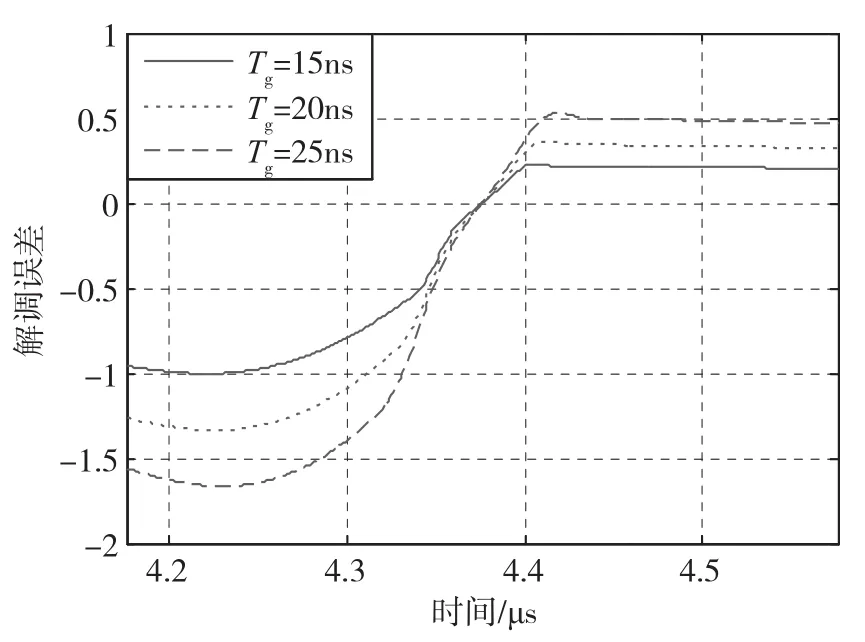
圖8 調制周期Tm、毛刺寬度Tg與輸出偏置Ω0的關系Fig.8 The relationship betweenTm、TgandΩ0
從圖9可以看出,調制周期與本征周期相對于初始值的偏移會改變解調的結果,產生解調誤差。當偏移量從0逐漸增加時,干擾信號面積增大,解調誤差逐漸增大;當偏移量達到一定大小時,干擾信號面積達到最大值,解調誤差最大;此后隨著調制周期的增加,干擾信號面積不變,單位時間內的干擾信號面積減小,解調誤差響應減小。另一方面,毛刺寬度越大,干擾信號面積越大,解調誤差越大。
理想情況下信號調理電路的帶寬M/Tm和增益帶寬積KampM/Tm為無窮大,但實際電路的增益帶寬積KampM/Tm是一個有限常值c。而增益隨著溫度會產生一定的變化,增益的變化將影響帶寬,從而影響能通過電路的諧波次數。信號的高頻分量丟失,造成信號的諧波失真,即可間接影響干涉信號幅值和輸出結果。此時,分析參數Kamp與分析參數M是等效的。
選取調制周期從初始值偏移+0.04μs,渡越時間不偏移,即調制周期為5.04μs,渡越時間為2.5μs的情況,利用式(3)、式(5)、式(6)和表1的參數仿真了參數Kamp、M和解調誤差的關系。圖9(a)表示電路增益帶寬積為39MHz時,增益與解調誤差的關系;圖9(b)表示當Kamp=8,電路增益帶寬積不受限制時,帶寬與解調誤差的關系。由仿真結果可以看出,隨著信號調理電路帶寬的增加,能通過的諧波次數增加,干擾脈沖高頻分量的丟失減少,時域中干擾信號的面積增大,造成陀螺解調的誤差增大。
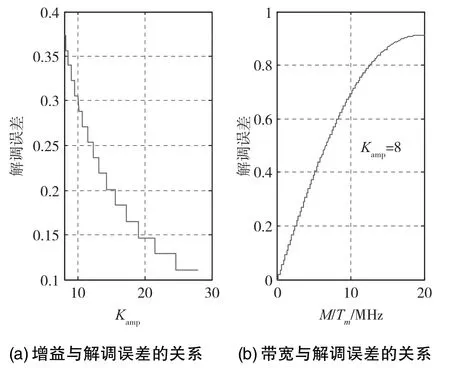
圖9 增益G、帶寬M/Tm與輸出偏置Ω0的關系Fig.9 The relationship betweenG、M/TmandΩ0
在閉環光纖陀螺理想模型的解調環節后引入該解調誤差,如圖10所示。
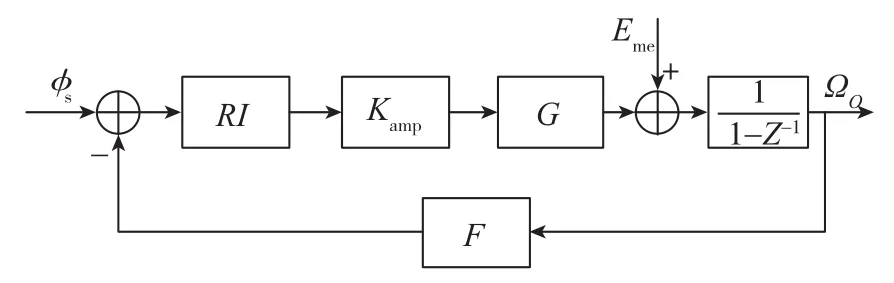
圖10 包含DAC毛刺造成解調誤差的光纖陀螺簡化模型Fig.10 The scheme of FOG model with demodulation errors caused by DAC glitch
在圖10中,?s表示Sagnac相移,Ω0為陀螺輸出角速率,F包括了調制驅動電路增益和集成光學調制器調制效率。
令輸入角速度?s=0,根據圖10模型寫出傳遞函數即可得輸出偏置的表達式:

當離散系統采樣頻率遠大于輸入信號頻率時有1-Z-1≈0,所以當系統輸入、輸出穩定時,可表示為:

3 DAC毛刺對光纖陀螺調制解調的影響實驗與分析
3.1 實驗方案
本文需要通過實驗驗證解調誤差產生的區域、解調誤差的大小。由于閉環檢測的階梯波是反饋形成的,且復位時間短,而開環檢測的階梯波可以人為地控制,因此對光纖陀螺進行開環檢測實驗[9],如圖 11 所示。
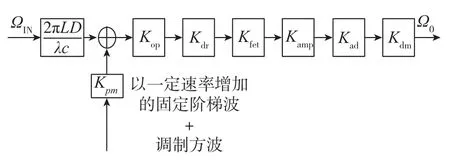
圖11 光纖陀螺開環測試簡化框圖Fig.11 The simplified frame graph of IFOG open?loop test
取消光纖陀螺的階梯波反饋,在調制器上增加2種信號,一種是方波調制信號,另一種是固定臺階的階梯波信號,且階梯波以緩慢的速率以1bit增加,復位周期約為20min。在實驗中,將經數字信號處理模塊解調后的值直接作為輸出進行采集,并將固定階梯波的臺階值同時作為輸出進行采集。
3.2 數據分析
采集結果中包括高頻噪聲信號與低頻誤差信號,為清晰地表示出DAC毛刺造成的調制解調誤差,采取平滑優先方法(Smoothness Priors Method,SPM)對數據進行預處理,以消除其中的高頻噪聲項,提取低頻非平穩趨勢項[10]。
采集的解調信號z包含平穩項zstat和非平穩趨勢項ztrend2部分:

提取非平穩趨勢項部分后可表示為:

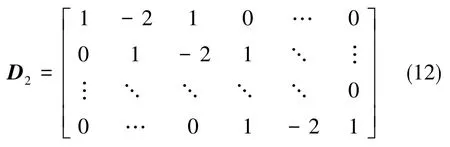
其中,λ為平滑參數,設置為500即可有效地去除原信號中的高頻噪聲項;Dd∈R(N-d)×N是用離散結果表示的d階微分,當其階次為2時可很好地估算信號中的非周期趨勢項,取Dd的階次為2,表示為:
3.3 實驗結果
不改變調制周期Tm,測試采集開環輸出的結果,將陀螺采集得到的數據繪制成曲線如圖12所示。其中,由圖12(a)對應解調輸出值隨時間的變化結果,圖12(b)對應階梯波數值隨時間的變化。
對數據進行SPM提取趨勢項處理,并取階梯波碼值為16384~32768的區域、階梯波碼值小于16384的區域、階梯波碼值大于32768的區域分別進行1階線性擬合,擬合結果如圖13所示。
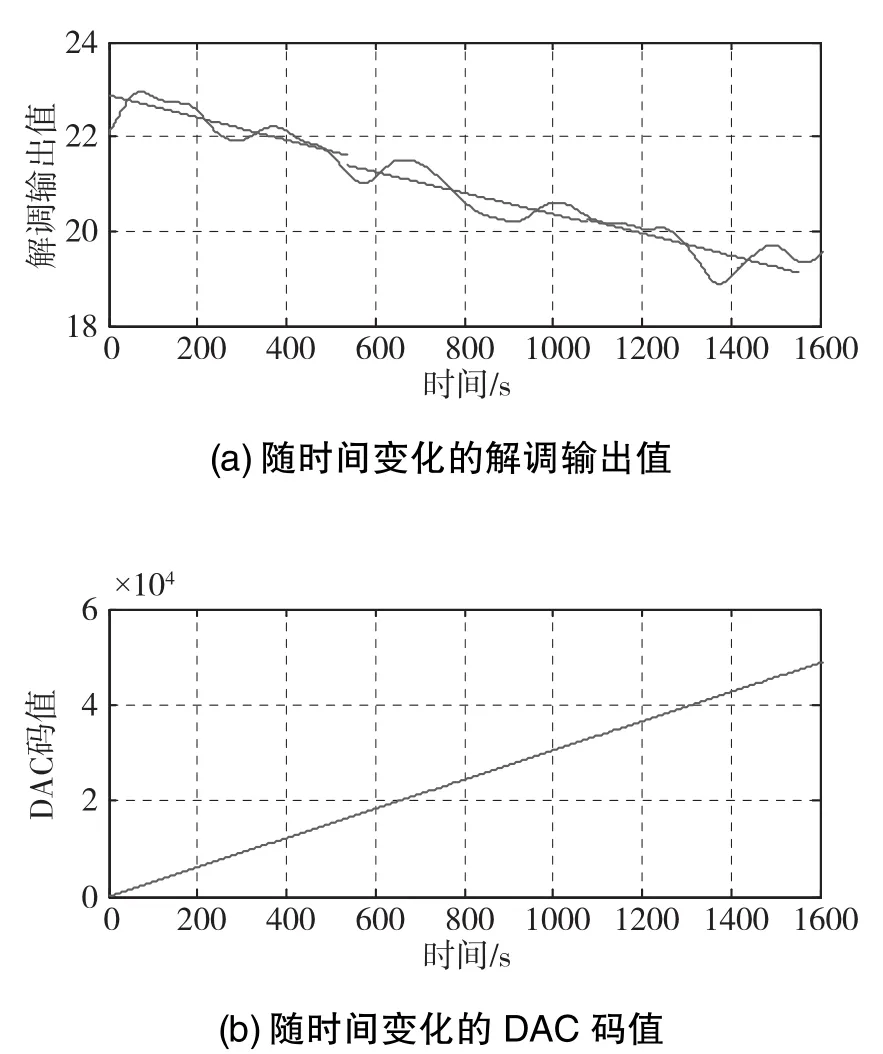
圖13 提取趨勢項并線性擬合的解調輸出結果Fig.13 Trend extraction and linear fitting of the demodulation output
對擬合的3段線段求出平均截距,并進行10組重復實驗,得到的數據如表2所示。
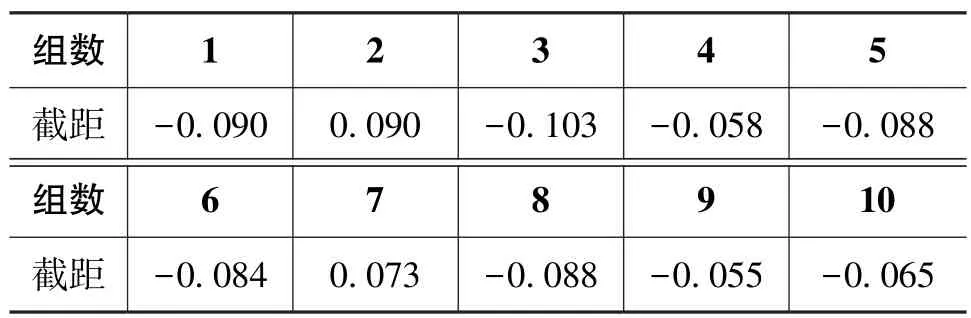
表2 fm=fp時突變段與非突變段的截距Table 2 Intercept of jump section and whenfm=fp
經計算得到,突變段(16384~32768)與非突變段的平均突變量為-0.0794。
圖14 調制頻率與本征頻率不同時的調制解調輸出結果Fig.14 Demodulation output whenfm≠fp
對數據進行SPM提取趨勢項處理,并取階梯波碼值為16384~32768的區域、階梯波碼值小于16384的區域、階梯波碼值大于32768的區域分別進行1階線性擬合,擬合結果如圖15所示。
對擬合的3段線段求出平均截距,并進行10組重復實驗,得到的數據如表3所示。
圖15 提取趨勢項并線性擬合的解調輸出結果Fig.15 Trend extraction and linear fitting of the demodulation output
表3 fm≠fp時突變段與非突變段的截距Table 3 Intercept of jump section and whenfm≠fp
經計算得到,突變段(16384~32768)與非突變段的平均突變量為-0.3887。
將實驗結果與仿真結果進行對比,如圖16所示。
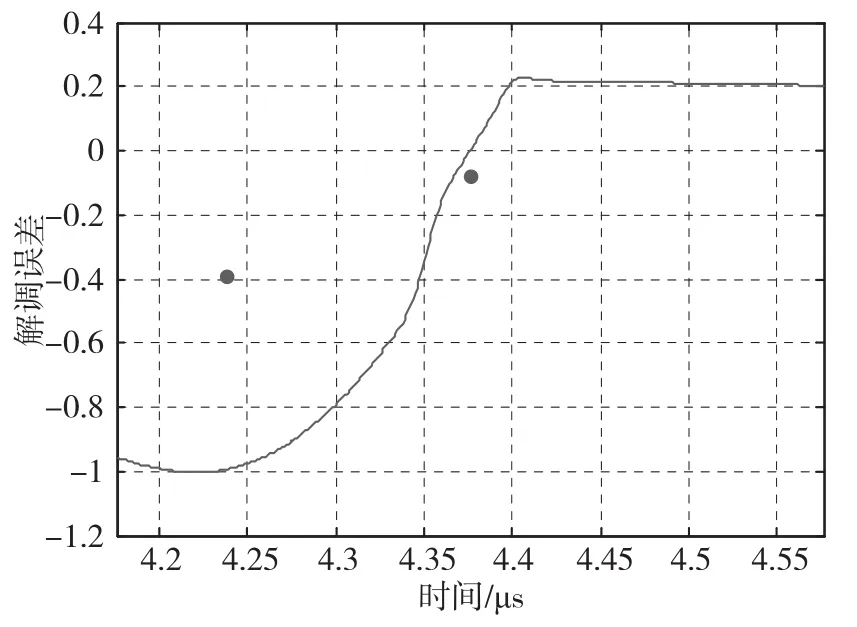
圖16 實驗與仿真結果對比圖Fig.16 The comparison chart of experiment and simulation result
通過2組實驗結果及實驗與仿真的對比結果可以看出,在調制頻率等于本征頻率時,解調結果沒有明顯的突變區域;當調制頻率不等于本征頻率時,解調結果在毛刺產生區域存在較明顯的突變。實驗結果與仿真結果的趨勢相符合。
4 結論
本文在數字閉環光纖陀螺調制解調原理的基礎上建立了DAC毛刺對光纖陀螺調制解調的影響模型,通過仿真分析表明:
1)當調制頻率與本征頻率不同時,DAC毛刺誤差將在光纖陀螺解調結果中造成附加偏置;
2)毛刺寬度和高度、調制驅動電路參數、信號調理電路增益和帶寬的變化將影響DAC毛刺造成的解調誤差。
通過開環實驗驗證了對DAC毛刺及其對調制解調影響的正確性,實驗結果與理論分析與仿真結果吻合。下一步將利用光纖陀螺的閉環模型,推導DAC毛刺產生的解調誤差對陀螺死區的影響,并進行實驗驗證。
[1]張曉峰,張桂才.閉環光纖陀螺中的死區抑制技術研究[J].壓電與聲光,2009,31(2):169?171.ZHANG Xiao?feng,ZHANG Gui?cai.Research on dead zone error reduction technique in closed?loop fiber optic gyroscope[J].Piezoelectrics & Acoustooptics,2009,31(2):169?171.
[2]Lefèvre H C.The fiber?optic gyroscope(2rd)[M].Artech House,2014.
[3]于海成,王巍,王軍龍.光纖陀螺反饋回路非線性的影響與對策[J].中國慣性技術學報,2010,18(4):487?492.YU Hai?cheng,WANG Wei,WANG Jun?long.Effect and suppression method of feedback loop nonlinearities in FOG[J].Journal of Chinese Inertial Technology,2010,18(4):487?492
[4]Kester W.Evaluating high speed DAC performance[J].Analog Device,2006.
[5]Rapuano S,Balestrieri E,Daponte P,et al.Experimental investigation on DAC glitch measurement[C].Proceedings of 20thIMEKO World Congress,Busan,South Korea,Me?trology for Green Growth,2012.
[6]Devices A.High speed design seminar[M].Analog Serv?ices,1990.
[7]李春明,孫圣和.數/模轉換器輸出毛刺對數字合成信號影響的分析及其消除方法[J].儀器儀表學報,1996(6):561?565.LI Chun?ming,SUN Sheng?he.An analysis of the effect of DAC glitches on digitally synthesized signals and deglitching method[J].Chinese Journal of Scientist Instrument,1996(6):561?565.
[8]金靖,潘雄,宋凝芳,等.方波調制誤差對光纖陀螺的影響分析與實驗[J].紅外與激光工程,2008,37(2):355?358.JIN Jing,PAN Xiong,SONG Ning?fang,et al.Analyses and experiments of effects of square wave modulation errors on fiber optic gyroscope[J].Infrared and Laser En?gineering,2008,37(2):355?358.
[9]Lo P H,Kovacs R A.Fiber optic gyroscope with reduced non?linearity at low angular rates[C].Guidance and Control 1998:Proceedings of the Annual AAS Rocky Mountain Guidance and Control Conference,Breckenridge,Colorado,1998,43:375?387.
[10]潘學萍,孫曉波,張麗欽.一種消除電力系統受擾軌跡非平穩趨勢項的方法[J].電力自動化設備,2010,30(6):63?66.PAN Xue?ping,SUN Xiao?bo,ZHANG Li?qin.Elimination of non?stationary trending component in disturbed trajectory of power system[J].Electric Power Automation Equipment,2010,30(6):63?66.
Effect of DAC Glitch on Correlation Modulation in Digital Closed?loop IFOG
DING Jiang?ting1,PAN Xiong1,ZHANG Hui2
(1.School of Instrumentation Science and Opto?electronics Engineering,Beihang University,Beijing 100191;2.Xi'an Advanced Control Technologies Research Institute,Xi'an 710065)
V241.5+9
A
1674?5558(2017)03?01344
10.3969/j.issn.1674?5558.2017.05.011
2016?12?03
丁江婷,女,碩士,光學工程專業,研究方向為光纖陀螺的相關檢測。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06