液壓挖掘機工作裝置建模分析與仿真
2017-10-11 03:26:50鐘星邵輝胡偉石
華僑大學學報(自然科學版) 2017年5期
關鍵詞:模型
鐘星, 邵輝, 胡偉石
(1. 華僑大學 信息科學與工程學院, 福建 廈門 361021;2. 華僑大學 實驗室與設備管理處, 福建 廈門 361021)

液壓挖掘機工作裝置建模分析與仿真
鐘星1, 邵輝1, 胡偉石2
(1. 華僑大學 信息科學與工程學院, 福建 廈門 361021;2. 華僑大學 實驗室與設備管理處, 福建 廈門 361021)
針對液壓挖掘機運動學和動力學建模復雜過程,以某型6 t挖掘機工作裝置為研究對象,利用SimMechanics對機械結構進行快速建模,從而代替運動學模型獲得挖掘機機構模型.采用Pro/E軟件對液壓挖掘機工作裝置建立三維模型,將其導入ADAMS環境中,并對比驗證作業結果.在ADAMS軟件中,對挖掘機工作裝置進行動力學仿真,得到液壓挖掘機的工作特性曲線.仿真結果表明:理論上添加的載荷能夠體現在各個驅動關節處受力變化中,相比其他階段,在挖掘階段關節受力矩變化影響較為復雜.
液壓挖掘機; 機構模型; 動力學分析; ADAMS軟件
Abstract: Motivated by complicated kinematics and dynamics modeling processes for hydraulic excavator, the presented paper aims to analyze mechanism modeling in 6 t hydraulic excavator. By using MATLAB/SimMechanics, the mechanical structure of the excavator was modeled rapidly instead of kinematics model. Its 3D model was constructed by using Pro/E and it was imported to ADAMS for remodeling. The reachable working area was compared with the result given by SimMechanics model. Furthermore, dynamics simulation of excavator working device were carried out with ADAMS software, and the working characteristic curves of the hydraulic excavator were obtained. The results of the simulation show that in theory added load on excavator bucket can be reflected in the torque change at each joint. Compared with other stages, the torque change is more complicated in the excavation stage.
Keywords: hydraulic excavator; mechanical structure model; dynamics analysis; ADAMS software
挖掘機是執行各項工業工程任務的重要設備,在工業、交通、運輸、建筑、水利、礦山開采等各個領域中已被廣泛使用[1].在某些復雜、危險及特殊的工作場合,沖擊和振動多,不適合人工操控,自主挖掘成為不可或缺的得力助手,這也促使挖掘機向智能化、自動化方向發展.對液壓挖掘機的工作裝置進行建模分析是實現自動挖掘的重要研究基礎.卡內基梅隆大學設計出能夠按照一定的策略自主挖掘裝載的機器人[2-3].Hall等[4]將迭代算法運用于對挖掘機的鏟斗運動軌跡的控制,并將該算法應用于其他多桿機構.Tomi等[5]討論了用全球定位系統(GPS)及CAD模型精確定位挖掘機的移動位置的方法,并采用ADAMS與MATLAB/Simulink進行了聯合仿真驗證.目前,大多采用類比法、查閱表格法、相關理論計算等對挖掘機工作裝置進行作業可達范圍研究[6].這些方法計算量大、精度低且耗時.以往的動力學分析主要集中在強度、剛度、結構優化等方面[7-8],對動態過程的動力學分析較少[9].為此,文中對液壓挖掘機工作裝置進行建模分析與仿真[10].
1 工作裝置主要作業范圍仿真分析
以某型6 t液壓挖掘機為研究對象,在MATLAB工具箱中的SimMechanics基礎上,建立挖掘機機械結構模型,只需根據動臂、斗桿和鏟斗的絕對轉角變化信息,即可獲得挖掘機作業軌跡和可達范圍.該方法簡化了計算和分析過程,簡單快捷.同時,采用Pro/E軟件建立挖掘機工作裝置的三維模型,并將其導入ADAMS軟件中,添加相應的運動副、約束和驅動函數,進行仿真、對比、分析,驗證其可行性.
1.1基于MATLAB/SimMechanics建立機構模型
液壓挖掘機結構示意圖[11-13],如圖1所示.圖1中:A~D分別為動臂下鉸點、動臂與斗桿的鉸點、斗桿與鏟斗的鉸點、斗齒尖.利用MATLAB/SimMechanics建立挖掘機仿真模型的步驟,如圖2所示.

圖1 液壓挖掘機結構示意圖 圖2 MATLAB/SimMechanics建模步驟Fig.1 Structure diagram of hydraulic excavator Fig.2 Modeling steps of MATLAB/SimMechanics
基于MATLAB/SimMechanics的工作裝置模型,如圖3所示.

圖3 基于MATLAB/SimMechanics的工作裝置模型Fig.3 Working device model based on MATLAB/SimMechanics

圖4 基于Pro/E與ADAMS聯合的工作裝置模型Fig.4 Working device model based on Pro/E and ADAMS
圖3中:工作裝置模型是由1個機械環境模塊、1個地模塊、3個剛體模塊、3個關節轉動副模塊和3個鉸接點運動激勵模塊等組成.文中剛體質量、轉動慣量和質心均不予以考慮,并根據6 t挖掘機的實際參數對應于各個模塊進行賦值.
1.2基于Pro/E與ADAMS建立機構模型
運用Pro/E對液壓挖掘機工作裝置建立三維模型,如圖4所示.利用PARASOLID格式將挖掘機幾何模型導入ADAMS中,并添加相應的運動副和約束,為挖掘機工作裝置分配時間,添加驅動函數.
1.3仿真與分析
基于SimMechanics建立的機構模型,在其可達范圍仿真過程中,時間設為無限長,初始狀態為各關節最大伸展狀態.挖掘機模型在t=7.2 s時的狀態圖,如圖5所示.
t=9 605 s時,鏟尖運動軌跡的輸出情況,如圖6所示.圖6中:LX,LY分別表示X,Y方向上的位移.由圖6可知:最大挖掘深度h1=4.531 1 m,最大抬升高度h2=5.497 1 m,最大水平挖掘范圍h3=5.562 8 m.
完成包絡線的運動過程中,各曲線段運動過程中動臂、斗桿和鏟斗的動作情況,如表1所示.

圖5 仿真在t=7.2 s時的運動狀態圖 圖6 t=9 605 s時挖掘機鏟尖的包絡圖 Fig.5 Moving state diagram at t=7.2 s Fig.6 Envelope diagram of bucket tip at t=9 605 s

曲線段動臂動作斗桿動作鏟斗動作ab保持不變保持不變由最大伸展狀態收縮至最小狀態bc保持不變由最大伸展狀態收縮至最小狀態保持不變cd保持不變保持不變伸展關節至A,D,C3點共線de由最大伸展狀態收縮至最小狀態保持不變保持不變ef保持不變保持不變伸展關節至A,C,D3點共線fg保持不變由最小收縮狀態伸展至最大狀態保持不變gh保持不變保持不變伸展關節至A,B,D3點共線hi由最小收縮狀態伸展至最大狀態保持不變保持不變
基于ADAMS建立的機構模型,在其可達范圍仿真過程中,采用ADAMS函數庫中的STEP函數控制液壓油缸的伸縮行程,設置各個液壓油缸STEP函數,如表2所示.

表2 液壓油缸驅動函數Tab.2 Driving functions of hydraulic cylinder

圖7 液壓挖掘機工作裝置作業范圍Fig.7 Reachable range of working device of hydraulic excavator
在鏟尖處創建Marker測量點,方便對鏟尖位置的測量.選取初始狀態為各液壓缸全縮狀態,仿真時間設置為16 s,步長為500,仿真計算并顯示結果.
通過運動仿真繪制的挖掘機工作裝置作業范圍,如圖7所示.為了驗證仿真模型的可靠性,將圖6,7所示的結果進行比較.
由圖6,7可知:運用SimMechanics獲得挖掘機工作過程中,最大挖掘高度、挖掘半徑、卸載高度與ADAMS軟件仿真模擬實際作業結果基本吻合,從而驗證了方法的正確性.
2 工作裝置動力學仿真分析
2.1挖掘載荷的計算
液壓挖掘機在進行挖掘任務時,可采用斗桿挖掘、鏟斗挖掘和混合挖掘等多種作業方式,工作裝置所承受的挖掘阻力因采取的挖掘方式不同而不同[14-15].一般情況下,挖掘過程是以各液壓油缸同時伸縮的混合挖掘方式進行的[16-17].挖掘阻力可按照挖掘軌跡的切線方向和法線方向分解為WQ和Wf[18],有
式(1)中:K0為挖掘比阻力系數;b為鏟斗平均寬度或挖掘寬度;h為挖掘深度;μ挖掘阻力系數.
對液壓挖掘機完成一個挖掘工作周期進行研究.其中,工作周期包括到達挖掘起始點位置、挖掘、提升和卸料4個環節.故采用混合挖掘機阻力進行計算,挖掘土壤類型選取Ⅲ級,挖掘比阻力系數K0取19.5 N·cm-2,斗寬b取90 cm,挖掘深度h取27.9 cm,挖掘阻力系數μ取0.42.計算得WQ=48.96 kN,Wf=20.57 kN.
挖掘土壤產生的重力為
式(2)中:ρ為土壤的密度,取1.8×10-6kg·m-3;g為重力加速度,取9.8 m·s-2;V為鏟斗容量,取0.25 m3.經過計算,可得G=4.4 kN.
2.2仿真與分析
在進行動力學仿真前,利用ADAMS建立的挖掘機工作裝置模型,在一個基本的工作周期內,對各個階段進行時間分配、驅動函數添加與載荷的添加.液壓挖掘機的工作循環圖,如圖8所示.

圖8 挖掘工作循環圖Fig.8 Cycle diagram of excavating working
選取動臂油缸、斗桿油缸和鏟斗油缸均全縮的狀態為初始狀態,仿真時間設為20 s,步長為500,通過后處理模塊得到的特性曲線,如圖9~12所示.
由圖9可知:土壤重力是從2 s初鏟斗開始執行挖掘任務時,由零逐漸增大,在7 s末挖掘任務結束時,重力增加至最大值4.40 kN,此時,鏟斗處于滿載狀態;之后,在動臂提升階段至卸載前均保持不變,到11 s初鏟斗開始卸載,重力不斷減小,直到16 s末土壤完全卸空,重力降為零; 挖掘法向和切向阻力
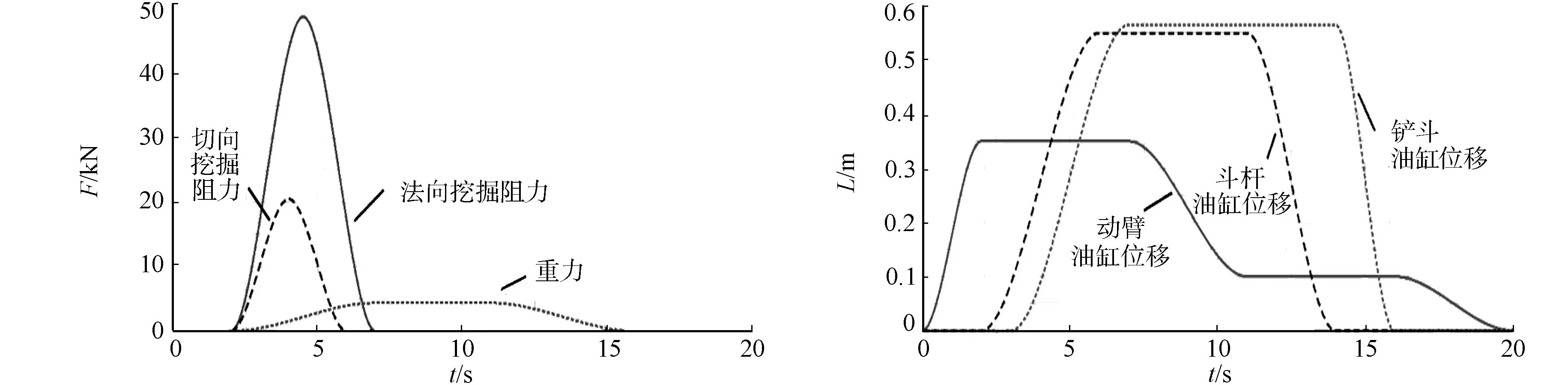
圖9 切向阻力、法向阻力和重力曲線圖 圖10 各液壓缸位移曲線圖 Fig.9 Curves of tangential resistance,normal resistance and gravity Fig.10 Displacement curves of hydraulic cylinders

圖11 各液壓缸速度曲線圖 圖12 3個關節力矩曲線圖Fig.11 Velocity curves of hydraulic cylinders Fig.12 Torque curves of three joints
在2 s初鏟斗進行挖掘時,由零逐漸增大,在4.5 s末分別達到最大值48.96,20.57 kN;然后,隨著鏟斗開始收斗后逐漸減小,直至完成挖掘任務后降為零.由此可知,載荷和重力可以合理地體現在挖掘的過程中.
按時間順序對圖10~12進行如下分析.
1) 0~2 s是到達初始挖掘點(最大挖掘半徑點)階段.該階段是由動臂油缸完成,動臂油缸伸長至2 s末,到達最大位置0.35 m,油缸速度先增后減,斗桿油缸與鏟斗油缸位移(L)和速度(v)均保持不變.由于自重與慣性力的影響,動臂的驅動關節力矩(T)有一個較大的突變,在短時間內減小至零,然后增大,另外2個驅動關節力矩較小,且變化幅度也不大.
2) 2~7 s是挖掘階段.此階段由斗桿油缸與鏟斗油缸共同配合完成,斗桿油缸在2 s初開始伸長,6 s末到達最大位置0.55 m,隨后保持不變.鏟斗油缸從3 s初伸長至7 s末,到達最大位置0.565 m.斗桿油箱和鏟斗油缸速度均呈現先增后減的狀態,而動臂油缸位移與速度則保持不變.3個驅動關節力矩均經歷了先增后減的過程.在4.3 s時,斗桿的驅動關節力矩達到最大值,鏟斗的驅動關節力矩達到最大值,動臂的驅動關節所受力矩達到最大值.之后,3個驅動關節力矩除了在6.8 s左右至挖掘任務即將結束時,動臂的驅動關節力矩有小幅度增加,其余總體趨勢大致都在減小,由此可知,液壓油缸的減速伸長對挖掘機工作裝置系統造成了一定的沖擊影響.
3) 7~11 s是滿鏟提升階段.在此階段中,斗桿油缸與鏟斗油缸均不動作,動臂油缸由原來的0.35 m收縮至0.10 m.其中,3組油缸速度均經歷了先增后減的過程,3個驅動關節力矩基本穩定.
4) 11~16 s是卸載階段.此階段中,動臂油缸不參與運動,故動臂油缸不動作,速度為零.斗桿油缸在11 s初收縮,14 s收縮至最短,油缸速度也在同時刻先增后減,鏟斗油缸在14 s開始收縮直至卸載結束,油缸速度在11~14 s,以及14~16 s均經歷了先增后減的過程.由于自重和慣性力的作用,3個驅動關節力矩都有所增加,卸載過程所受外載荷越來越小,所以驅動關節受力矩有些許的突變.
5) 16~20 s是返回初始狀態階段.該階段動臂油缸收縮至最短,速度先增后減.斗桿油缸與鏟斗油缸位移和速度均保持不變.3個驅動關節力矩基本都是平穩下降的,僅在動臂開始和制動時有小幅度的突變.
縱觀挖掘機的整個運動過程可知:3個驅動關節力矩總體變化趨勢基本相似,但由于挖掘機工作姿態的變化對動臂的驅動關節力矩產生一定的沖擊影響,突變明顯.工作裝置慣性載荷與挖掘機液壓系統對其存在密不可分的影響.在自動挖掘過程中,通過實時分析獲得各個驅動關節力矩、液壓缸位移和速度變化曲線,為更好地實現平滑挖掘,高效挖掘奠定基礎.
3 結束語
對挖掘機工作裝置機械結構與動力學問題進行理論建模,利用SimMechanics快速建模繪制機械結構運動的包絡圖,獲得挖掘機可達工作范圍,進一步運用Pro/E對挖掘機工作裝置建立三維模型,將模型導入ADAMS軟件,對挖掘機工作裝置的作業范圍進行對比,驗證方法的正確性.采用ADAMS軟件,對挖掘機工作裝置進行動力學仿真,得到挖掘機油缸位移、速度和各個驅動關節力矩與時間的特性曲線,對實現自主挖掘具有重要意義.仿真結果表明:理論上添加的載荷能夠體現在各個驅動關節處受力變化中,相比其他階段,受力矩變化較為復雜的是在挖掘階段,該研究為今后挖掘機實現自動挖掘提供理論依據,為進一步研究挖掘機自主平滑避障軌跡規劃和有限元分析力的加載奠定基礎,也為實際的挖掘作業提供指導.
[1] 呂鵬偉.液壓挖掘機工作裝置動力學特性的研究[D].太原:太原科技大學,2013.
[2] PEYRET F,JURASZ J.The computer integrated road construction project[J].Automation in Construction,2000(9):447-461.
[3] SINGH S,CANNON H.Muti-resolution planning for earth moving[C]∥Proceedings International Conference on Robotics and Automation.Leuven:[s.n.],1998:121-126.
[4] HALL A S,MCAREE P R.Robust bucket position tracking for a large hydraulic excavator[J].Mechanism and Machine Theory,2005,40(1):1-16.
[5] TOMI M,KELERVO N,RAUNO H.Automation of an excavator based on a 3D CAD model and GPS measurement[J].Automation in Costruction,2006,15(5):571-577.
[6] 李楊民,謝存禧,王驥湘.液壓挖掘機工作裝置動臂、斗桿機構的多體系統運動學分析[J].建筑機械,1994(11):22-25.
[7] LEE M C,CHUNG S H,CHO J H,etal.Three-dimensional finite element analysis of powder compaction process for forming cylinder block of hydraulic pump[J].Powder Metallurgy,2008,51(1):89-94.
[8] SUI Tianzhong,WANG Lei,TAN Zhen,etal.Structural parameters optimization of excavator working device based on mining process[J].Advanced Materials Research,2012,421:759-763.
[9] 張樹忠,鄧斌,柯堅.基于液壓變壓器的挖掘機動臂勢能再生系統[J].中國機械工程,2010,21(10):1160-1166.
[10] 呂廣明,劉明思,楊揚,等.基于Pro/E ADAMS的液壓挖掘機工作裝置的動力學仿真分析[J].建筑機械,2013(17):86-90.
[11] 林慕義,史青錄.單斗液壓挖掘機[M].北京:冶金工業出版社,2011:35-57.
[12] 劉韜.液壓挖掘機工作裝置結構特性分析與仿真[D].長沙:中南大學,2010.
[13] 鄭東京.挖掘機工作裝置的有限元分析及其仿真[D].楊凌:西北農林科技大學,2011.
[14] 王敏.液壓挖掘機工作裝置的動態仿真及有限元分析[D].西安:長安大學,2015.
[15] 王在昌.液壓挖掘機工作裝置動力學分析及有限元優化分析[D].濟南:山東科技大學,2011.
[16] 張桂菊,肖才遠,譚青,等.基于虛擬樣機技術挖掘機工作裝置動力學分析及仿真[J].中南大學學報(自然科學版),2014(6):1827-1833.
[17] 郭銀賽,張毅,程明科.基于虛擬樣機技術的挖掘機工作裝置運動仿真與優化設計[J].機床與液壓,2015,43(15):169-172.
[18] 李淵博,何清華,張大慶.液壓挖掘機工作裝置動力學分析與仿真研究[J].機床與液壓,2006(10):170-171.
(責任編輯: 錢筠英文審校: 崔長彩)
ModelingAnalysisandSimulationofHydraulicExcavatorMechanism
ZHONG Xing1, SHAO Hui1, HU Weishi2
(1. College of Information Science and Engineering, Huaqiao University, Xiamen 361021, China;2. Department of Laboratory and Device Management, Huaqiao University, Xiamen 361021, China)
10.11830/ISSN.1000-5013.201611085
2016-11-23
邵輝(1973-),女,副教授,博士,主要從事機器人控制、運動規劃、智能控制、非線性系統LPV建模的研究.E-mail:shaohuihull@163.com.
福建省科技計劃項目(2015H0026); 福建省泉州市科技計劃項目(2013Z34); 第48批留學回國人員科研啟動基金(Z1534004)
TU 621
A
1000-5013(2017)05-0602-06
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19