基于載荷率的電動公交車再生制動控制策略
2017-10-17 09:43:31趙國柱孫瓊瓊唐驚幽
中國機械工程 2017年19期
趙國柱 孫瓊瓊 唐驚幽 李 亮
南京農業大學工學院, 南京, 210031
基于載荷率的電動公交車再生制動控制策略
趙國柱 孫瓊瓊 唐驚幽 李 亮
南京農業大學工學院, 南京, 210031
為提高城市電動公交車再生制動能量回收效率,針對城市電動公交車日常運輸載重變化顯著的特點,提出了一種基于不同載荷率的再生制動控制策略。建立了不同載重情況下電動公交車的行車制動系前后軸制動力分配系數優化模型,運用遺傳算法求出了空載、半載、滿載情況下的最優制動力分配系數,并根據優化后的制動力分配系數對再生制動力進行了控制。為驗證控制策略的有效性,在電動汽車仿真軟件ADVISOR2002平臺上進行了仿真分析。結果表明:與制動力分配系數無調整時相比,該策略在符合歐洲經濟委員會(ECE)制動法規的前提下,顯著提高了制動能回收量。
載荷率;城市電動公交車;制動力分配;再生制動控制
Abstract:To improve the regenerative braking energy recovery efficient of electric city buses, a novel braking force distribution control strategy for electric buses was proposed based on real load in view of the characteristics of electric buses that daily transport load changes significantly. The optimized mathematical model of the braking system was established. Firstly, optimized braking force distribution coefficients under the circumstances of full-load and no load were acquired by adopting the genetic algorithm. Then braking force distributions were controlled based on the optimized braking force distribution coefficients. New control strategy was added in ADVISOR2002 to verify the effectiveness of the control strategy. The simulation results reveal that compared with the primary control strategy where braking force distribution coefficients were invariable, the proposed strategy may improve the recovery of regenerative braking energy significantly on the premise of economic commission of Europe(ECE) braking regulations.
Keywords:rate of loading; electric city bus; braking force distribution; regenerative braking control
0 引言
再生制動是電動汽車節能的重要途徑之一[1-2],城市工況下車輛制動頻繁,再生制動節能效果尤其明顯。再生制動力的制動能力因受多種因素約束而有限[3],因此當請求的制動強度較大時,仍需機械制動系參與制動,從而形成機電混合制動系統,該系統有串聯式與并聯式兩種基本控制策略[4]。串聯式控制策略制動能回收率高,適于各種驅動形式的汽車[5],但其控制系統復雜,技術難度大[6];并聯式的特點是結構簡單、工作可靠,系統中機械制動系沒有變化[7-8],制動時,再生制動力與機械制動力按固定比例分配,當再生制動失效時,機械制動系仍可保證制動安全性,由此,在目前城市電動客車的開發研究中常被采用。由于電動公交車多為后驅型車輛,當機電并行制動的制動強度在中等偏小以上時,前后軸實際制動力分配線基本上位于理想分配線上方,再加上制動時載荷前移,在地面附著條件不夠時,會使后軸提前抱死,造成制動穩定性下降。SANGTARASH等[9]從盡可能回收制動能,適當降低制動穩定性出發,將機電并行制動時的前后軸實際制動力分配線緊貼理想分配線(即I曲線)外側。劉宏偉等[10]則強調穩定性,加大對此時的再生制動力限制,盡量使前后軸制動力實際分配線控制在I線內側。
以上方案均沒有考慮城市電動客車工程運行實踐,機電并行制動的制動強度范圍過大,造成為保持制動穩定性,不得不過多地降低再生制動份額,而且機電并行制動時仍然存在后軸提前抱死的可能。為此,趙國柱等[11]既對前后軸制動力分配比作適當調整,也依據法規限制再生制動力,使得小制動強度時前后軸制動力實際分配線位于I線內側。ZHANG等[12]提出了再生制動系統(RBS)與自動防抱死系統(ABS)的協同控制策略,該策略保證了高制動強度下的安全性與穩定性,同時增加制動能的回收,防止了驅動軸抱死。PENG等[13]采用邏輯門限控制與模糊控制方法分別自動調整液壓制動力矩與再生制動力矩,保證再生制動系統與ABS系統的協調配合,即使在緊急制動時也能獲得良好的制動性能。但這些方案需復雜的控制系統,也使ABS頻繁工作而加大ABS能耗,且系統的可靠性尚需大量實驗。
目前,電動公交車再生制動控制策略鮮見有根據車輛的實際載重量來調節再生制動力與機械制動力的制動份額,然而作為城市公共交通工具的電動公交車,其載重量從客流低谷時的幾乎空載到高峰時的滿載,一天當中實際載荷率變化很大,因此根據電動公交車的不同載荷率來實時調節再生制動力與機械制動力的制動份額,能在滿足駕駛員制動請求的前提下,提高制動能量的回收量。
1 制動力分配系統計算模型
1.1 再生制動力參與后的利用附著系數
后驅型電動汽車機電并行制動時前后軸利用附著系數φf和φr分別為[14]
(1)
(2)
式中,β為行車制動系前后軸制動器制動力分配系數;z為制動強度;a為質心至前軸距離;b為質心至后軸距離;L為前后軸的軸距;hg為質心距地面的高度;G為整車重力;Fre為驅動輪上的再生制動力。
1.2 ECE制動法規的限制條件
ECE制動法規對非M1類和N1類汽車制動性能的明確要求如圖1所示[15]。對各種載荷下的各類兩軸汽車來說,后軸利用附著系數曲線要位于前軸利用附著系數曲線之下;且當路面附著系數φ在0.2~0.8之間時,應滿足φ≤(z+0.07)/0.85。當非M1類和N1類汽車的最大總質量大于3.5 t時,且z∈[0.15,0.30]時,各軸利用附著系數曲線要位于φ=z± 0.08之間;當z≥0.3時,后軸利用附著系數要滿足φ≤ (z-0.0188)/0.74。由此,當再生制動的制動強度不能滿足駕駛員制動請求時,應立即讓機械制動參與制動,決不能為了多回饋制動能而只讓再生制動進行制動;其次,為使制動安全性滿足制動法規要求,即使有時再生制動有足夠制動能力,也要抑制其制動能力,以使車輛的制動效率滿足要求。
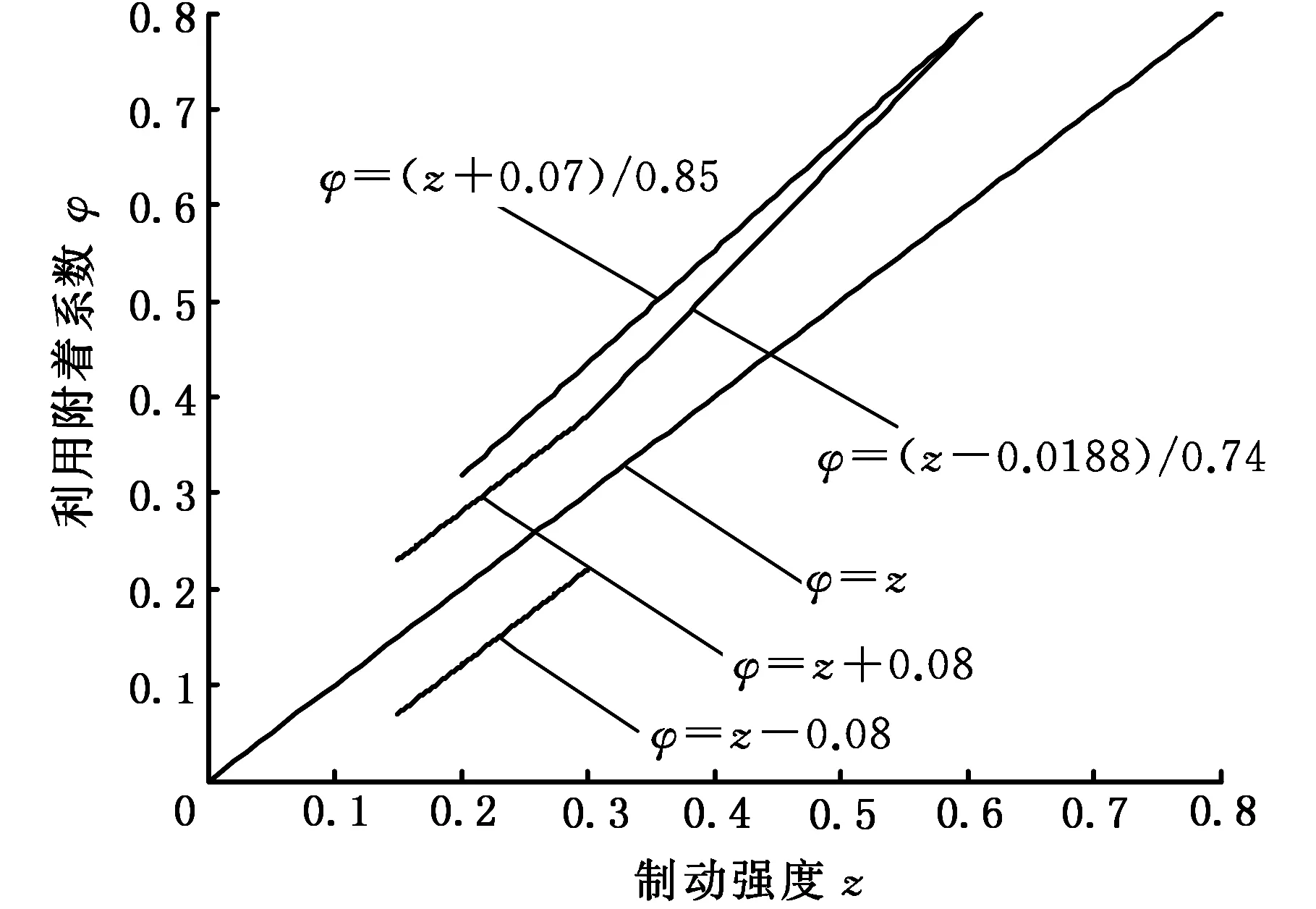
圖1 ECE R13法規對非M1、N1類汽車的制動性要求Fig.1 Braking performance requirement of ECE R13 regulation for non M1, N1 vehicles
根據以上要求建立利用附著系數不等式組:
(3)
將式(1)和式(2)代入不等式(3)并將其分解為如下不等式:
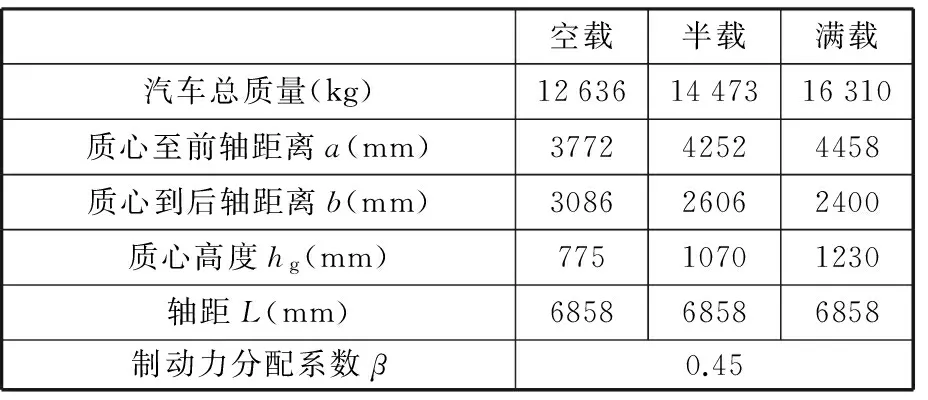
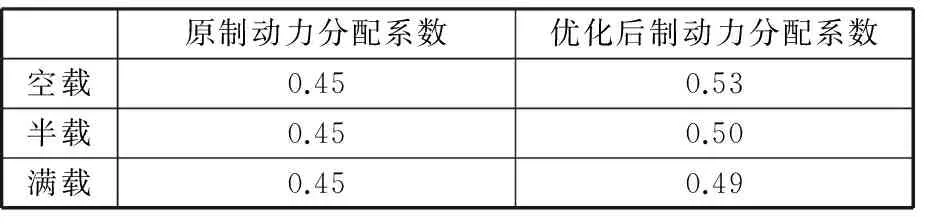
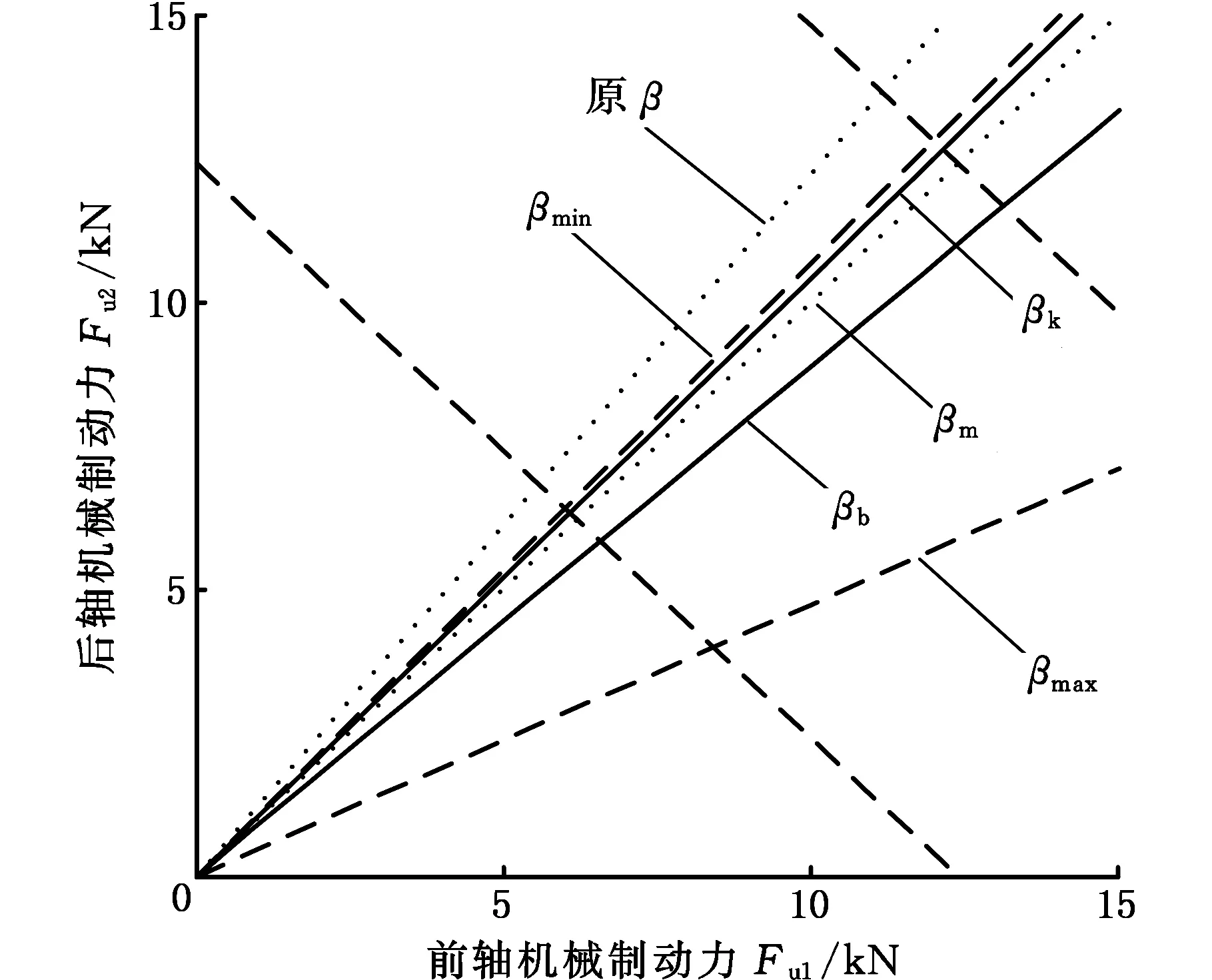
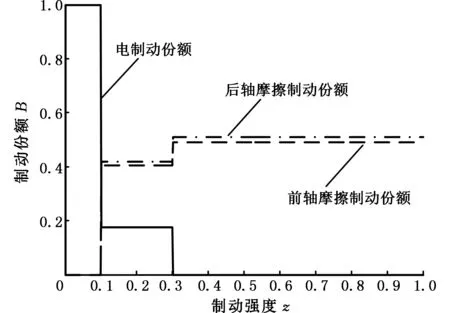
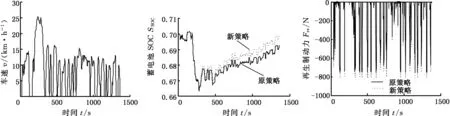
Fre1 0.02a}/(0.74Lβ) 0.3≤z≤0.8 (4) Fre2≤G[-hgz2+(Lβ-b)z]/(Lβ) (5) Fre3 0.08b]/(Lβ) 0.15≤z<0.3 (6) Fre4 0.08a}/(Lβ) 0.15≤z<0.3 (7) Fre5>G{-hgz2+[a+0.08hg-L(1-β)z- 0.08a]}/(Lβ) 0.15≤z<0.3 (8) Fre6>G[-hgz2+(Lβ-0.08hg-b)z- 0.08b]/(Lβ) 0.15≤z<0.3 (9) 由此建立了再生制動系統制動力、整車參數、制動強度及制動力分配系數之間的匹配關系。由以上6個不等式得到的再生制動力分別用Fre1、Fre2、Fre3、Fre4、Fre5、Fre6表示,則有 Fremax=min(Fre1,Fre3,Fre4,Fre6) Fremin=max(Fre2,Fre5) 那么,由6個不等式可以求出滿足ECE R13制動法規的再生制動力范圍: Fremin≤Fre≤Fremax (10) 為了使車輛在保證制動穩定性前提下,盡可能提高地面附著利用率,不同載荷率下前后軸機械制動力分配比的目標函數取為各種裝載情況、各種制動強度下前后軸利用附著系數與制動強度之差的平方和最小,表達式為 (11) k=m/M (12) 式中,k為載荷率;m為車輛實際載質量;M為車輛滿載時載質量;φfm、φfk分別為前輪在滿載和空載時的利用附著系數;φrm、φrk分別為后輪在滿載和空載時的利用附著系數。 目標函數f(z,k) 是制動力分配系數β和再生制動力Fre的函數,求解該二元函數的最小值,并根據ECE制動法規得出的不等式(10)約束條件,即可得出不同載重率下前后軸機械制動力的最優分配系數。 求解不同載荷率下前后軸機械制動力分配系數的目標函數的最小值是典型的函數優化問題,而遺傳算法在解決目標優化問題上具有先天的優勢[16]。本文采用該算法進行求解: (1)確定決策變量和約束條件。該問題的決策變量為k、β、Fre,約束條件為k∈[0,1]、β∈[0,1]、Fre的范圍如式(10)所示。 (2)建立優化模型。該問題的數學模型如式(11)所示。 (3)確定編碼方法。用長度為40位的二進制編碼串來表示決策變量,再將分別表示k、β、Fre的三個40位的二進制編碼串連在一起,組成一個120位的二進制編碼串。 (4)確定個體評價方法。由優化模型可知,該函數的值域總是非負的,故可將個體的適應度直接取為對應的目標函數值。 (5)設計遺傳算子。選擇運算使用比例選擇算子,交叉運算使用單點交叉算子,變異運算使用基本位變異算子。 (6)確定遺傳算法的運行參數。 經過以上步驟,利用MATLAB語言進行遺傳算法編程,可以得出車輛在空載、半載、滿載下的最優制動力分配系數。 ECE制動法規要求M3類汽車制動力分配系數應滿足下式: βmin≤β≤βmax (13) (14) 將不同載重情況下的最優制動力分配系數、法規邊界值,以及原制動力分配系數進行對比,即可得出控制規律。 在機電復合階段,增大行車制動系的β值可以減小后軸機械制動力Fu2,從而相應增加再生制動力Fre的制動份額。據此制定再生制動時前后軸機械制動力分配系數控制策略:若βe>βmax,則β′=βmax;若βmin<βe<β<βmax,則β′=β;若βmin<β<βe<βmax,則β′=βe;若βe<βmin,則β′=βmin。其中βe為由優化模型得出的不同載重下的最優制動力分配系數,β′為最終適合于車輛制動的制動力分配系數。 為驗證所提控制策略的有效性,現選用電動汽車仿真軟件ADVISOR2002的仿真平臺中的串聯混合動力公交車車型(serial hybrid electric bus, SHEB)進行仿真試驗。 該SHEB的整車參數如表1所示。 表1 SHEB的整車參數Tab.1 Vehicle parameters of a SHEB 根據遺傳算法,本例設定的運行參數為:群體大小Q=200,終止代數T=100,代溝Gp=0.95,交叉概率pc=0.7,變異概率pm=0.01。經編程算得該車在空載、半載與滿載下的最優制動力分配系數如表2所示。 表2 優化前后不同載重制動力分配系數Tab.2 Different braking force distribution ratios before and after optimization 根據式(13)與式(14)得出該車的βmin=0.48,βmax=0.68。該車在空載、半載與滿載時的行車制動系最優制動力分配線與該車原來的行車制動力分配線,及ECE制動法規邊界線的關系如圖2所示。圖中Fu1、Fu2分別代表前后軸機械制動力,直線分別為該車型原β線,法規邊界βmin線、βmax線、優化后的空載時βk線、優化后的半載時βb線、優化后的滿載時βm線。 圖2 三種載重情況下的β線與法規邊界線Fig.2 Relationship between line and regulation limits line under three load circumstances 將不同載重情況下的最優制動分配系數線與法規邊界線以及原制動分配系數線作對比,根據上述控制策略得出的最終空載、半載、滿載情況下的機械制動力分配系數分別為βk=0.53,βb=0.50,βm=0.49。 根據以上結果分別計算出空載、半載、滿載情況下各制動強度對應的制動份額,如圖3~圖5所示。 圖3 空載時Fre、Fu1與Fu2的制動份額Fig.3 Braking shares of Fre, Fu1 and Fu2 under no-load circumstance 圖5 滿載時Fre、Fu1與Fu2的制動份額Fig.5 Braking shares of Fre, Fu1 and Fu2under full-load circumstance 本文以美國可再生能源實驗室開發的高級車輛仿真軟件ADVISOR2002為仿真平臺,該軟件是基于MATLAB/Simulink環境開發的用于快速分析汽車動力性、燃油經濟性和排放性的高級軟件。ADVISOR2002允許用戶對模塊進行自主開發,為仿真分析提供了很大便利。由于ADVISOR2002中的車輛模型全部都是前驅模式,而本文選取的串聯式電動公交車為后驅型,所以在運用ADVISOR2002仿真分析之前,要對軟件模塊進行修改。本文根據文獻[3]介紹的方法對該軟件進行二次開發,主要工作為:①在軟件中添加后驅車型;②修改軟件原有的再生制動控制策略仿真模塊。 在修改后的仿真平臺上,輸入整車參數,根據表2中的空載、半載、滿載情況下的制動力分配情況進行美國城市循環工況(UDDS)仿真,并對同一車輛模型在機械制動力分配系數不變的原策略下進行仿真,仿真對比結果如圖6~圖8所示,其中SOC表示電池荷電狀態。 (a)車速 (b)SOC (c)再生制動力圖6 UDDS工況下空載時原策略和新策略下的電池SOC、再生制動力對比Fig.6 Comparison of battery SOC and regenerative braking force between original strategy and new strategy for the no-load circumstance under UDDS condition (a)車速 (b)SOC (c)再生制動力圖7 UDDS工況下半載時原策略和新策略下的電池SOC、再生制動力對比圖Fig.7 Comparison of battery SOC and regenerative braking force between original strategy and new strategy for the half-load circumstance under UDDS condition (a)車速 (b)SOC (c)再生制動力圖8 UDDS工況下滿載時原策略和新策略下的電池SOC、再生制動力對比圖Fig.8 Comparison of battery SOC and regenerative braking force between original strategy and new strategy for the full-load circumstance under UDDS condition 由圖6~圖8可知,與原策略相比,在空載、半載、滿載的情況下新的控制策略均可使制動過程中再生制動力的制動份額增加,因而在整個循環工況過程中,蓄電池的 SOC均高于原策略時的SOC。與空載、滿載情況相比,半載情況下的再生制動力矩增加幅度較小,但總體上再生制動份額仍有所增加。 基于不同載重率的電動公交車再生制動控制策略能夠在滿足ECE制動法規的前提下,顯著提高再生制動的能量回收量。該策略的硬件結構僅需在行車制動系中設置不同的載荷比例閥,系統結構簡單,具有較強的工程實用性。 [1] ZHANG J, LI Y, CHEN L, et al. New Regenerative Braking Control Strategy for Rear-driven Electrified Minivans[J]. Energy Conversion & Management,2014,82:135-145. [2] 楊亞娟, 趙韓, 李維漢,等. 電動汽車再生制動與液壓ABS系統集成控制研究[J]. 合肥工業大學學報:自然科學版,2012,35(8):1054-1058. YANG Yajun, ZHAO Han, LI Weihan, et al. Study on Integrated Control of Braking and Hydraulic ABS System[J]. Journal of Hefei University of Technology: Natural Science Edition,2012,35(8):1054-1058. [3] 趙國柱. 電動汽車再生制動若干關鍵問題研究[D]. 南京:南京航空航天大學,2012. ZHAO Guozhu. Research on Several Key Problems of Regenerative Braking for Electric Vehicles[D]. Nanjing: Nanjing University of Aeronautics & Astronautics,2012. [4] OLEKSOWICZ S, BURNHAM K, GAJEK A. On the Legal, Safety and Control Aspects of Regenerative Braking in Hybrid/Electric Vehicles[J]. Technical Transactions,2012,109(8):139-155. [5] SHU J, ZHANG Y, YIN C. Longitudinal Control of Hybrid Electric Buses Using Traction Motor and Pneumatic Braking System[J].WSEAS Transactions on Circuits & Systems,2009,8(11):873-882. [6] ZHANG J Z, CHEN X, ZHANG P J. Integrated Control of Braking Energy Regeneration and Pneumatic Anti-lock Braking[J]. Proceedings of the Institution of Mechanical Engineers Part D, Journal of Automobile Engineering,2010,224(5):587-610. [7] ZHANG J, LYU C, GOU J, et al. Cooperative Control of Regenerative Braking and Hydraulic Braking of an Electrified Passenger Car[J]. Proceedings of the Institution of Mechanical Engineers Part D, Journal of Automobile Engineering,2012,226(10):1289-1302. [8] LIU J, MA J, JIANG W. Research on Parallel Regenerative Braking Strategy for Hybrid Buses Based on the Adequacy of Energy Recovery[J]. International Journal of Science,2014,1(1):24-40. [9] SANGTARASH F, ESFAHANIAN V, NEHZATI H, et al. Effect of Different Regenerative Braking Strategies on Braking Performance and Fuel Economy in a Hybrid Electric Bus Employing CRUISE Vehicle Simulation[J]. SAE International Journal of Fuels & Lubricants,2008,1(1):828-837. [10] 劉宏偉, 趙文平, 呂奉陽. CA6700EV純電動客車再生制動控制策略研究[J]. 汽車技術,2009(8):25-30. LIU Hongwei, ZHAO Wenping, LYU Fengyang. Study on Regenerative Braking Control Strategy of CA6700EV Pure Electric Bus[J]. Automotive Technology,2009(8):25-30. [11] 趙國柱,魏民祥,李玉芳.利用慣性比例閥增強電動公交車制動能回收力[J]. 重慶大學學報,2012,35(4):26-32. ZHAO Guozhu, WEI Minxiang, LI Yufang. Using Inertia Proportional Valve to Enhance the Braking Capacity of Electric Buses[J]. Journal of Chongqing University,2012,35(4):26-32. [12] ZHANG J, LYU C, QIU M, et al. Braking Energy Regeneration Control of a Fuel Cell Hybrid Electric Bus[J]. Energy Conversion & Management,2013,76:1117-1124. [13] PENG D, ZHANG Y, YIN C L, et al. Combined Control of a Regenerative Braking and Antilock Braking System for Hybrid Electric Vehicles[J]. International Journal of Automotive Technology,2008,9(6):749-757. [14] 趙國柱, 楊正林, 魏民祥,等. 電動微型客車的機電復合制動穩定性分析[J]. 汽車工程,2006,28(7):681-684. ZHAO Guozhu, YANG Zhenglin, WEI Minxiang, et al. Electromechanical Composite Braking Stability Analysis of Electric Minibus[J]. Automotive Engineering,2006,28(7):681-684. [15] KO J W, KOS Y, KIM I S, et al. Co-operative Control for Regenerative Braking and Friction Braking to Increase Energy Recovery without Wheel Lock[J]. International Journal of Automotive Technology,2014,15(2):253-262. [16] 雷嗣軍,宋小文.遺傳算法與ADVISOR聯合優化仿真汽車動力傳動系統[J].機械科學與技術,2010,29(9):1137-1141. LEI Sijun, SONG Xiaowen. Optimization of Vehicle Powertrain with Genetic Algorithm and ADVISOR.[J]. Mechanical Science and Technology,2010,29(9):1137-1141. (編輯袁興玲) RegenerativeBrakingControlStrategyBasedonRateofLoadingforElectricBuses ZHAO Guozhu SUN Qiongqiong TANG Jingyou LI Liang College of Engineering, Nanjing Agriculture University,Nanjing,210031 U461.3 10.3969/j.issn.1004-132X.2017.19.016 2016-11-15 國家自然科學基金資助項目(51005113);江蘇省農機局科研啟動基金資助項目(Gxz10003) 趙國柱,男,1968年生。南京農業大學工學院博士、副教授。研究方向為電動汽車再生制動與復合電源系統。發表論文20余篇。 E-mail:zhaogz@njau.edu.cn。孫瓊瓊,女,1992年生。南京農業大學工學院碩士研究生。唐驚幽,男,1989年生。南京農業大學工學院碩士研究生。李亮,男,1991年生。南京農業大學工學院碩士研究生。
0.15≤z≤0.32 不同載重下機械制動力分配系數的優化
2.1 目標函數的設計

2.2 目標函數的求解方法
2.3 再生制動控制策略
3 實例驗證
3.1 SHEB的再生制動控制策略

3.2 仿真試驗平臺
3.3 仿真結果的分析
4 結束語
猜你喜歡
能源工程(2020年6期)2021-01-26 00:55:22當代工人(2020年8期)2020-05-25 09:07:38鐵道通信信號(2020年9期)2020-02-06 09:15:22山東冶金(2019年3期)2019-07-10 00:54:04數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43小學科學(學生版)(2019年5期)2019-05-21 01:00:18經濟技術協作信息(2018年30期)2018-11-22 06:20:24消費導刊(2018年10期)2018-08-20 02:57:02小溪流(畫刊)(2017年12期)2018-01-10 16:07:29科技知識動漫(2016年8期)2016-07-29 20:40:09