基于電流跟蹤控制法的比例電磁閥驅動控制系統
2017-10-18 09:42:47蔡勝年王玉川龐寶麟
沈陽化工大學學報 2017年3期
蔡勝年, 王玉川, 龐寶麟
(沈陽化工大學 信息工程學院, 遼寧 沈陽 110142)
基于電流跟蹤控制法的比例電磁閥驅動控制系統
蔡勝年, 王玉川, 龐寶麟
(沈陽化工大學 信息工程學院, 遼寧 沈陽 110142)
在分析電流跟蹤控制器參數變化對比例電磁閥流量滯環影響的基礎上,設計了一種簡單、可靠的比例電磁閥驅動控制系統.以比例電磁閥驅動電流脈動量作為控制目標,通過改變電流跟蹤控制器的滯環寬度來精確地控制比例電磁閥的流量滯環.以STC12C5A60S2單片機為核心器件設計了比例電磁閥電流跟蹤PWM控制系統,并通過比對實驗,驗證了該控制算法應用在比例電磁閥流量控制上的實用性.實驗證明:該系統具有控制精度高、價格低廉、操作簡單、運行穩定等特點.
電流跟蹤; 比例電磁閥; 脈動量; 脈沖調制
比例電磁閥[1]閥芯的靜摩擦力是引起流量(壓力)滯環的主要原因之一,脈寬調制驅動電壓作用在比例電磁閥線圈時將使驅動電流產生脈動量,驅動電流的脈動量能夠使比例電磁閥的移動鐵芯產生相應的顫振效果,使移動鐵芯運動時的靜摩擦變成動摩擦,從而減小流量滯環.比例電磁閥的開環PWM控制系統雖然能夠產生顫振效果,但是對顫振量的大小不能夠自動調節和控制,系統的控制精度低,抗干擾性能差,控制性能不能滿足系統要求.由電流、流量(或壓力)構成的雙閉環控制系統,雖然可以獲得較好的控制效果,但是需要增設流量傳感器構成流量反饋環,系統結構復雜,故障率增加,成本高.本文采用電流跟蹤PWM單閉環控制方法,以滯環比較器的環寬作為主要控制參數,根據系統的工作壓力和流量,優化計算比例電磁閥驅動電流脈動量[2]所要求的滯環寬度,從而有效地控制流量滯環寬度,提高系統的動、靜控制性能.本文設計的比例電磁閥電流跟蹤單閉環控制系統,能夠提高驅動電流控制精度,而且具有操作簡單、運行穩定、流量(壓力)滯環量小(滯環寬度可以控制在5 %以內)等優點.
1 比例電磁閥電流跟蹤控制

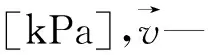
比例電磁閥的驅動電流波形和PWM電壓波形如圖2所示.在比例電磁閥的電流跟蹤PWM控制系統中,給定電流為直流電流信號,滯環控制器的環寬根據比例電磁閥的入口、出口壓差Δp及流量Q及滯環控制函數f(Δp,Q)確定最優滯環寬度,滯環控制函數是基于比例電磁閥在各工況下的實測數據建立的,事前經過優化計算后,確定f(Δp,Q),并存入單片機中.
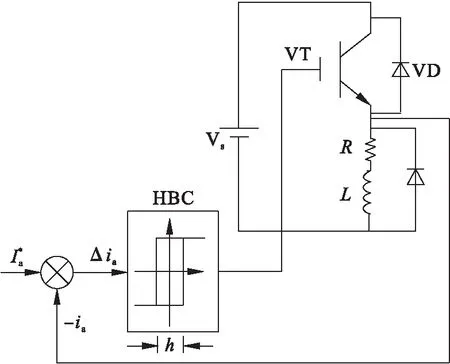
圖1 電流滯環跟蹤控制原理圖
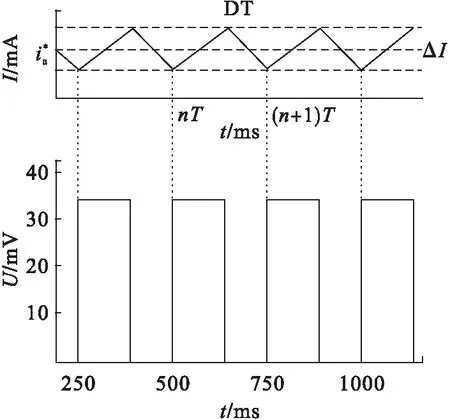
圖2 比例電磁閥線圈理想的電壓電流波形
2 電流跟蹤PWM控制系統
2.1 比例電磁閥基本控制方程
當IGBT導通時,電壓平衡方程:

(1)
當IGBT關斷時,電壓平衡方程:
(2)
式中:U—直流電源電壓[V];Ron(IGBT)—IGBT的電阻[Ω];Ron(VT)—二極管的電阻[Ω].在公式(1)、(2)中,Ron(IGBT)和Ron(VT)相對于與R相比,可忽略不計.
比例電磁閥的移動鐵芯在運動過程中的受力過程比較復雜.在線圈電流i建立的磁場中,由經典虛位移法,得電磁力計算公式:

(3)

當比例電磁鐵在線性工作區時,具有良好的驅動電流-電磁力特性關系,其數學模型可近似為如下線性表達式:
Fm=Ki·i
(4)
式中:Ki—比例電磁閥的電流增益;i—驅動電流[A];Fm—電磁鐵線圈在銜鐵上的作用力[N].
當線圈電流產生如圖2所示的脈動ΔI時,電磁力的變化量為:
ΔFm=Ki·ΔI
(5)
在比例電磁閥中流量方程主要與壓力P及閥口截流面積Av、流量系數Cq、流體密度ρ等因素有關,具體公式為:
(6)
電磁閥工作過程中的流體運動方程:
(7)
閥芯上升的運動方程:
(8)
閥芯下降的運動方程:

(9)
式中:m—動鐵芯質量[kg];Fm—電磁力[N];Fp—液壓力[N];Fw—穩態液動力[N];f—摩擦力[N];Fy—彈簧預緊力[N];c—阻尼系數[N/(m·s-1)];k—彈簧剛度[N/m];x—彈簧位移[m](動鐵芯位移).
由公式(4)、(5)可知隨著線圈電流的脈動,電磁力也隨之脈動,移動鐵芯受力發生變化,從而使位移產生ΔS大小的顫振量.這個顫振量的大小對比例電磁閥流量(壓力)滯環產生較大的影響.由此,可以通過控制驅動電流的脈動量ΔI的大小來控制移動鐵芯位移ΔS,從而得到不同的控制效果.
PWM控制能夠使移動鐵芯產生位移顫振,顫振量的大小直接影響比例閥流量滯環特性,采用電流跟蹤控制方法,可以將驅動電流脈動量ΔI作為被控參數,通過改變滯環控制器的環寬h(即優化計算得到的f(Δp,Q)),可以有效地控制驅動電流脈動量ΔI的大小,實現對移動鐵芯位移顫振量ΔS精確控制,將輸出流量的滯環寬度控制在最小范圍內.
2.2 控制參數的設計
求解電壓方程可得驅動電流脈動量ΔI的公式如下[4]:
(10)
式中:D—占空比(D=ton/T)[%];U—輸出電壓[V];R—比例電磁閥的線圈電阻[Ω];T—PWM驅動電壓的開關周期[s];τ—比例電磁閥時間常數.
比例閥的驅動電流脈動量呈指數上升或指數下降的形式,如圖2所示,由于τ=L/R,比例閥的時間常數近似為定值,在不考慮功率器件內阻及電路結構的影響時,同一個比例電磁閥驅動電流脈動量的上升、下降的斜率也是近似相同的.當比例電磁閥的壓力、流量確定后,滯環控制器的環寬就確定了,作為被控對象的驅動電流脈動量的大小也就確定了,而PWM驅動電壓的驅動頻率f和占空比D由滯環比較器的環寬來自動確定.
對實測值與建模得到的計算值的適合性進行檢驗,采用最大誤差emax及公式(11)、(12)計算估計標準誤差s及平均相對誤差絕對值emape.估計標準誤差值越小,表明實際值越緊靠估計值,得到結果越好;而平均相對誤差絕對值可以作為綜合度量所建模型對樣本觀測值的指標,它的取值越小,所建立的模型越準確.本文只考慮比例電磁閥主要工作區間的平均相對誤差絕對值.
(11)
(12)
2.3 電流跟蹤PWM控制系統的實現
電流滯環跟蹤控制的控制精度高,響應快,且易于實現[5].傳統的電流跟蹤系統大都采用硬件電路控制,對硬件電路和開關器件的開關頻率都有一定的要求,且成本較高.本文設計的電流跟蹤系統如圖3所示.
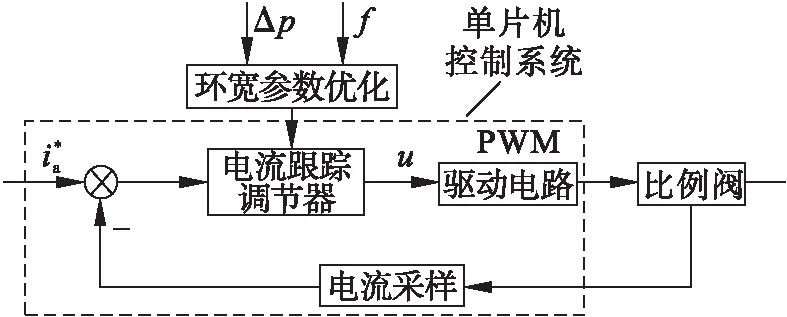
圖3 電流跟蹤系統框圖
系統采用STC12C5A60S2單片機為核心,利用整數式滯環控制器實現電流跟蹤控制,通過設置PCAPWM控制寄存器產生PWM波,對比例電磁閥驅動電流進行電流跟蹤控制.控制系統的硬件結構如圖4所示.
由單片機輸出頻率、占空比可調的PWM信號,通過光耦的光電隔離之后,與驅動電路相連,控制MOS管的導通、關斷來實現比例電磁閥的電流跟蹤PWM控制[6].采用單片機與驅動電路結合的硬件電路可靠性好,性能高,成本低.
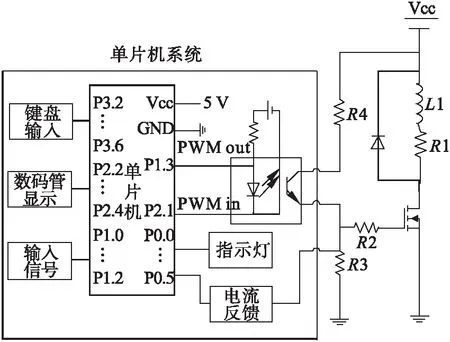
圖4 控制器系統結構
系統軟件主要包括主程序和中斷程序兩部分.主程序首先是初始化,然后進入系統主循環,完成電流跟蹤計算及PWM控制,并不斷刷新指示狀態、調用顯示和按鍵掃描子程序,并進行報警識別(是否需要報警,若需要報警則調用報警及保護程序).在A/D中斷程序中完成驅動電流采樣和濾波,見圖5.
圖5 主程序流程
3 實驗結果
實驗中所用比例電磁閥參數如表1所示,控制器參數如表2所示.

表1 比例電磁閥參數

表2 控制器參數
通過改變滯環控制器環寬h控制驅動電流脈動量的大小,測取流量滯環曲線,并與在直流電流驅動、單閉環PI電壓驅動進行比對,在上述條件下的比對結果分別如圖6和圖7所示.

圖6 三種控制方式的滯環曲線

圖7 三種控制方式的滯環量
滯環比較:由圖6和圖7可以看出,比例電磁閥電流跟蹤PWM控制系統的流量滯環量(<5 %)明顯小于直流電流驅動和單閉環PI電壓驅動的流量滯環量,滯環量與平均滯環量均得到明顯減少.
線性度比較:電流跟蹤PWM控制系統流量滯環的線性度明顯優于單閉環PI電壓驅動流量滯環的線性度.
4 結 論
在不同的壓力和流量及流量滯環情況下,為了保證在不同壓力、不同流量下均能實現流量滯環最小,需要根據壓力和流量調整比較器的滯環寬度,以實現電流脈動量的最優控制效果.本文提出了一種把電流滯環跟蹤應用在比例電磁閥PWM控制系統的新算法,這種算法能夠有效地減小比例電磁閥流量(壓力)滯環,明顯改善死區現象.通過實驗證明,這種方法能夠提高流量滯環的線性度,死區情況有所改善,系統的魯棒性更強.
[1] 吳勇,楊喜晶,劉廣治,等.伺服閥控非對稱缸的壓力躍變分析與仿真[J].液壓氣動與密封,2011,31(7):30-33.
[2] CAI S N,YING Z,PANG B L,et al.Research on the Relationship between Drive Current Pulsating Quantity of Proportional Solenoid Valve and Flow Hysteresis[DB/OL](2012-12-08)[2015-07-03]http://ieeexplore. ieee.org/document/ 64289791.
[3] 王偉超,王銀河.基于反卷積計算的 BLDCM電流跟蹤控制器設計[J].廣東工業大學學報,2010,27(4):81-84.
[4] 朱玉田,唐興華.脈寬調制中的顫振算法[J].機械工程學報,2009,45(4):214-218.
[5] 武迪,趙繼敏,蔣鵬.基于電流跟蹤型PWM技術的數字式步進電機細分驅動技術[J].電工技術,2009(8):66-68.
[6] 陳斌,楊安平.電液比例閥控制系統的研究設計[J].微型機與應用,2012,31(7):82-84.
Abstract: In this paper,a simple and reliable proportional solenoid valve drive control system is designed,which is based on the analysis of the influence of the change of the current tracking controller parameters on proportional solenoid valve flow hysteresis.The current fluctuation of proportional solenoid valve is used as the control target,and the flow hysteresis width of the proportional solenoid valve can be controlled accurately by changing the current hysteresis width of the tracking controller.The proportional solenoid valve current tracking PWM control system was designed using STC12C5A60S2 microcontroller as the core component.The practicability of this control algorithm in the application of the proportional electromagnetic valve flow control was verified through the comparison of experiment.The experimental results showed that the control system has high precision,low price,simple operation,stable operation characteristics.
Keywords: current tracking; proportional electromagnetic valve; pulsating quantity; pulse modulation
TheDriveControlSystemofProportionalSolenoidValveBasedontheCurrentTrackingControlMethod
CAI Sheng-nian, WANG Yu-chuan, PANG Bao-lin
(Shenyang University of Chemical Technology, Shenyang 110142, China)
10.3969/j.issn.2095-2198.2017.03.016
TP271
A
2015-07-14
蔡勝年(1957-),男,江西樂平人,教授,博士,主要從事電磁技術應用方面的研究.
2095-2198(2017)03-0273-05