家用智能凈化清掃一體機測控系統設計
2017-11-01 13:04:21肖奇軍李勝勇張俊杰
肇慶學院學報 2017年5期
關鍵詞:系統
肖奇軍,李勝勇,張俊杰
(1.肇慶學院 電子與電氣工程學院,廣東 肇慶 526061;2.廈門蒙發利科技(集團)股份有限公司,福建 廈門 361008)
家用智能凈化清掃一體機測控系統設計
肖奇軍1,李勝勇2,張俊杰2
(1.肇慶學院 電子與電氣工程學院,廣東 肇慶 526061;2.廈門蒙發利科技(集團)股份有限公司,福建 廈門 361008)
為實現對地面和空氣中粉塵的雙重清潔功能,設計開發出家用智能凈化清掃一體機和相應的控制系統.在闡述系統主要功能的基礎上,進行控制系統的軟硬件設計,主要包括傳感器數據采集系統、通訊系統、人機交互系統、滑動門、展開門步進電機驅動系統,以及風機、靜電吸附、負離子等凈化器控制系統.該系統智能化程度高,可以對房間粉塵濃度參數進行監控,并能夠自動控制掃地機進行地面清潔和回充,從而保持室內空氣和地板清潔.在對地板積塵厚度建立數學模型和推算的基礎上,實現凈化器和掃地機之間的協同控制.原型樣機的建立,可實現對室內環境高效、節能的清掃和凈化.
凈化清掃;一體機;控制系統;積塵厚度;系統設計
0 引言
科研人員測試發現室內灰塵中存在各種各樣的有毒有害物質,如重金屬、殺蟲劑,其主要來源于家居產品、玩具、電器等,人們通過呼吸和皮膚接觸等方式將自己暴露于灰塵中,灰塵嚴重影響到人們的身體健康.為減少室內灰塵對人體健康的影響,我們研制出一種智能路徑規劃的清掃空氣凈化兩用機[1].這種新型的設計具有掃除室內垃圾和空氣凈化兩大功能,能有效減少室內污染,減少空氣的粉塵和有毒氣體,具有減輕家務勞動強度和保護人們健康的雙重功能[2],能實現清掃凈化過程中的智能化和實時監控.
1 智能凈化清掃一體機控制系統
研發的智能清掃凈化一體機,主要由單片機組成的控制子系統、智慧終端監控子系統及通信子系統組成.控制子系統是整個系統的控制核心,它負責實時采集溫濕度傳感器、PM2.5粉塵濃度傳感器等的數據控制凈化器和掃地機工作,并將工作參數發送給智慧終端,同時可以接收智慧終端發送的控制命令,因此控制子系統功能的優劣決定了系統的性能.它需要實現的主要功能包括:控制凈化器、滑動門、伸展門、掃地機等設備工作,同時將系統的工作參數發送給智慧終端,接收上位機發送的系統參數閾值及相關命令,便于對系統進行遠程監控.根據上述要求,控制系統需要實現的功能主要包括如下幾點:
1)傳感器數據的實時采集:如對室內空氣溫度和濕度、PM2.5粉塵傳感器、霍爾位置傳感器等的數據采集.
2)凈化器支持手動控制和WiFi遙控控制,接收智慧終端通過WiFi傳來的控制信息,實現開關機控制、定時控制、風速控制、童鎖控制和模式控制.返回空氣凈化器運行狀態給APP,對開關機、定時、風速、濾網剩余壽命、PM2.5、溫濕度和報警等信息進行采集.
3)根據按鍵響應執行相應的命令,掃地機回充、自動清掃開啟和取消命令,睡眠模式、自動模式設置、打開和關閉燈帶和指示燈等.
4)系統信息的實時顯示:能夠對實時采集到的數據,如溫濕度、PM2.5數據進行交替顯示.對時間、風速、灰塵累積量、濾網剩余時間、電池格、手動清掃、童鎖、回充、睡眠、負離子、自動清掃、自動凈化、靜電吸附、WiFi信號強弱等圖標和數字進行顯示的功能.
5)掃地機遙控控制,進行凈化器伸展門控制,釋放掃地機進行自動清掃、停止及掃地機回充等命令.
2 控制系統硬件總體結構和設計
控制系統負責協調一體機各部件的整體工作狀態,提供人機交互信息,輸出控制變量,根據實際應用情況,智能凈化清掃一體機測控系統組成框圖如圖1所示.該系統主要包括主控制器、傳感器、人機交互系統、通訊系統、風機、步進電機、靜電吸附等7個部分,控制系統是凈化器的核心,負責整個凈化器的運轉控制和數據交互,包括傳感器數據信息接收和處理、用戶控制信息控制、外設控制等[3-4].
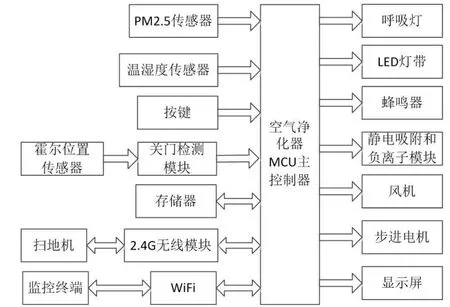
圖1 智能凈化清掃一體機測控系統組成框圖
傳感器模塊主要采集環境信息,包括PM2.5粉塵濃度傳感器、溫濕度傳感器.PM2.5粉塵濃度傳感器與單片機UART口連接,單片機采用串口通訊方式接收傳感器傳來的數據,溫濕度傳感器采用單總線通訊方式的DHT11.關門檢測模塊檢測霍爾位置傳感器的狀態,判斷凈化器伸展門和滑動門的開關門狀態;人機交互系統提供用戶與機器信息交互,用戶可以通過按鍵或WiFi無線通訊控制凈化器運轉和進行參數設置,同時在智慧終端和VA顯示屏上顯示工作狀態.風機加速室內空氣流動,靜電吸附和負離子模塊進行靜電吸附除塵與空氣凈化.空氣凈化器通過2.4G無線模塊ARF2496K與掃地機進行通訊,以便進行協同控制.8個步進電機控制凈化器滑動門、伸展門的打開和關閉,其中左邊2對電機控制左側滑動門和伸展門向左運動,右邊2對電機控制右側滑動門和伸展門向右運動.開機時先打開滑動門,再打開伸展門,釋放掃地機進行地面清潔,當掃地機回充后關機,先關閉伸展門,再關閉滑動門.滑動門、伸展門電機控制硬件由7路集成達靈頓管IC芯片ULN2003A組成,它采用集電極開路輸出,輸出電流大,故可直接驅動步進電機,采用永磁式步進電機進行單極性驅動,步距角為90°.以1對開關門驅動電機為例,左右電機和控制器I/O口的接線關系如圖2所示.IO1-IO2-IO3-IO4按順序通電,這樣在ULN2003A驅動下,左電機通電順序為A-B-C-D,轉子順時針轉動,打開左側門.由于右電機驅動線反接,則右電機通電順序為D-C-B-A,轉子逆時針轉動,打開右側門.若關門,則I/O的通電順序為IO4-IO3-IO2-IO1.設計出來的原型機如圖3所示,可以實現上述功能.控制系統的難點在于多種通訊方式的結合及相應通訊協議的設置,傳感器數據處理和相應的外設控制以及掃地機凈化器的協同控制.
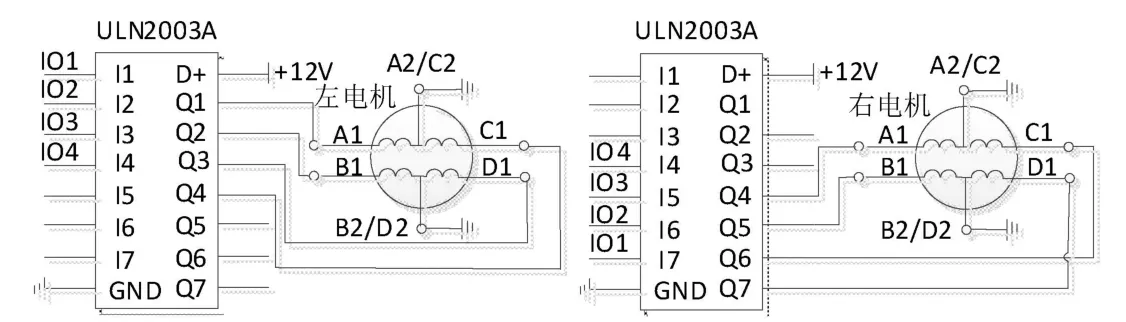
圖2 左右電機和控制器I/O的接線圖
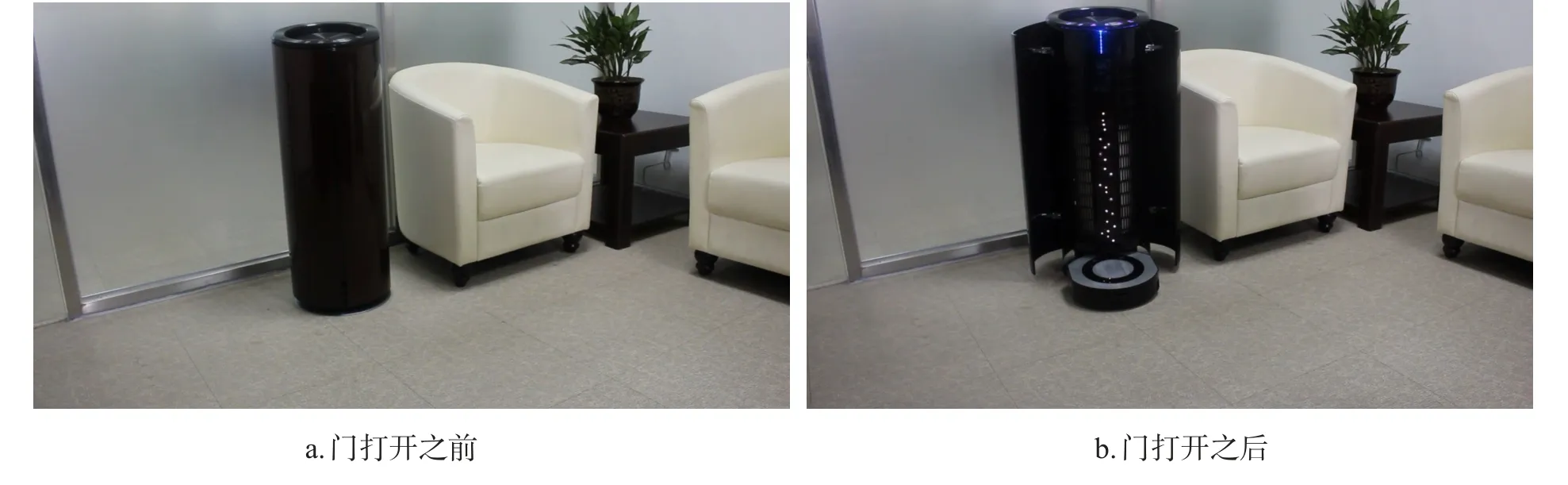
圖3 智能凈化清掃一體機原型機
3 控制系統主程序流程和軟件設計
本文設計的智能凈化清掃一體機,是以arm單片機為核心來控制整個系統運行的[5-6],包括對風機、靜電吸附、負離子、步進電機、人機交互界面等的控制,以及傳感器數據采集,按鍵等輸入和與掃地機、智慧終端之間的通訊.主控制程序流程圖如圖4所示,凈化器上電后,主程序開始執行,首先進行系統的初始化,包括對I/O端口、UART通訊、定時器、看門狗、FLASH初始化、2.4G無線通訊模塊、顯示屏幕、RTC時鐘等進行初始化,開機面板閃爍等待開機.然后進入主循環控制程序,監測濾芯復位狀態并進行復位,進行WiFi一鍵配置,APP控制處理,掃地機對碼,檢測開機電源按鍵是否按下.若按下,則檢測開機標志位;若置位,則關閉凈化器風機,凈化器回復到關機前狀態.若開機標志位復位,則關閉伸展門、掃地機、呼吸燈等外設,退出睡眠狀態.若開機電源鍵未被按下,則檢測過濾網時間,VA屏幕顯示溫濕度值,調用按鍵掃描處理程序,根據相應標志位,執行相應的控制功能,執行定時關機、根據相應的標志位控制蜂鳴器,掃地機遙控,VA屏幕狀態顯示和定時關機等控制程序.

圖4 主控程序流程圖
3.1 按鍵響應控制子程序的設計
根據按鍵響應設置相應的按鍵背光和VA顯示標志,執行燈帶、風機、負離子等相應程序.如果電源鍵打開,則響應按鍵背光、指示燈、燈帶亮.如果掃地機回充按鍵按下,則啟動回充,關閉清掃,否則關閉回充.如果掃地機自動清掃開啟,則打開自動清掃功能;否則關閉自動清掃功能,打開手動清掃.如果是睡眠模式,則睡眠按鍵背光打開,關閉指示燈和燈帶,調整風機速度為低速擋,如果滑動門打開,空氣凈化器電機才開啟.如果是清掃自動模式,則負離子開,判斷PM2.5數值大小,調整相應的風機速度.如果不是自動模式,則關閉自動模式按鍵背光.如果負離子打開,則負離子指示燈亮,否則負離子指示燈滅.根據風速大小點亮相應風速指示燈.如果童鎖按鍵打開,則相應童鎖按鍵背光打開.按鍵響應控制程序如圖5所示.
3.2 步進電機控制子程序設計
為了控制滑動門和伸展門的打開和關閉,需要控制步進電機轉動圈數,對應滑動門和伸展門打開的角度.為了避免失步,應合理設置換相時的延長時間,即電機轉動的速度.控制程序流程圖如圖6所示,首先設置轉數和延時時間,判斷電機是否需要正轉.若正轉,則按照A-B-C-D相序加電,步進電機正轉;若反轉,則按照D-C-B-A相序加電,步進電機反轉,判斷是否達到指定轉數.若達到指定轉數則復位,電機停止轉動;若未到則重復走步,直到到達為止.

圖5 按鍵響應控制程序流程圖
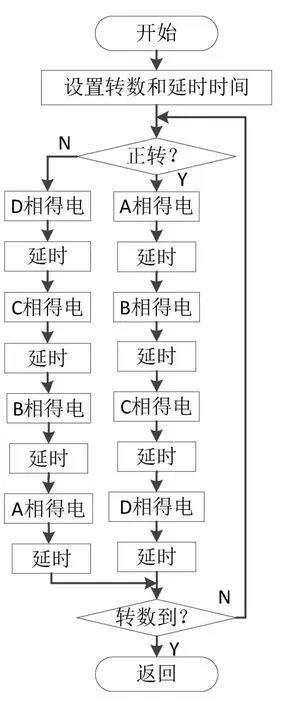
圖6 步進電機控制流程圖
軟件采用C語言編制,實現傳感器數據采集、按鍵響應、外設輸入輸出處理、標志位判斷和功能處理、延時程序、凈化器控制、掃地機控制、步進電機控制、通訊設置等,在軟件設計上具備以下性能要求:
1)實時性.系統采用串口通訊采集PM2.5傳感器的數據,采用單總線數據通訊方式與溫濕度傳感器進行通訊.這要求系統軟件具有一定的實時性采集要求.
2)可靠性.系統軟件的可靠性是指軟件在運行過程中避免發生故障的能力,以及一旦發生故障后排除故障的能力.軟件設計時應考慮控制器在通訊過程中可能出現的異常狀況,如通信超時等,因此,軟件設計應考慮采用相應的防錯和容錯措施,以提高控制系統的可靠性.
3)易修改性和可移植性.一個完善的系統軟件,需要經過多次的修改和調試才能滿足所要求的功能和特性.因此軟件在總體設計時,必須要有良好的結構,采用模塊化的方式,以便提高軟件在反復修改、調試和完善過程中的效率.同時,對各功能都采用模塊化、函數化設計,這樣可讀性強,移植方便.
4 掃地機和凈化機協同控制技術
為了使新的凈化清掃一體機能更加智能化,更高效地清理房間積塵.我們擬建立一個積塵數學模型,用于指導凈化清掃一體機的工作模式控制.積塵數學模型的建立以目前空氣凈化器上使用的粉塵傳感器(GE SM-PWM-01A),測量空氣中的粉塵濃度作為主要參數.該傳感器通過測試輸出低電平的比例可換算出空氣中的粉塵濃度C(Dμg/m3),即可以知道空氣中每立方米含有粉塵的質量.通過傳感器沉降速度實驗,進行地面積塵質量的推算.
通過實驗室的實驗可知,粉塵在密閉空間(不考慮氣流影響)和一定時間內基本能沉降下來.在起始時間段內拋入粉塵,室內粉塵濃度上升至恒定值,然后靜置房間,記錄實時粉塵濃度.可以看出,粉塵濃度不斷下降至恒定值,實驗表明空氣中的粉塵沉降至地面.設單位時間內粉塵濃度變化率為k(μg/(m3·h)),室內體積為V(m3),則單位時間t(h)內室內地板的粉塵質量可以表示為

根據沉降實驗可知k=236,即沉降到室內地面粉塵濃度變化率為236μg/(m3·h).72 h內在32 m2表面積和3 m高的房間沉降的質量MD為1.63 g.當推算出MD大于設定最大值時,掃地機開始工作,此時PM2.5粉塵濃度傳感器和空氣凈化器關閉.當掃地機完成工作進行回充后,PM2.5粉塵濃度傳感器打開,空氣凈化器根據傳感器測到的室內顆粒物濃度智能調節風速;當室內空氣質量指數達到優時,空氣凈化器根據顆粒物濃度值間歇性工作.
5 結論
針對室內空氣和地板清潔,研制出一套由凈化器和掃地機組成的智能凈化清掃一體機.該一體機能實現室內粉塵濃度遠程監控,從而延長凈化器濾網的壽命,提高室內清潔效率,使系統全面智能化.通過利用地面積塵推算,實現掃地機和凈化器之間的協同控制,從而實現對室內空氣質量和地板積塵厚度的全面控制和管理.
[1] 鄒劍寒.一種新型空氣凈化、自動清掃一體機:201410371775.X[P].2014-07-31.
[2] 牛力偉.自動清掃與空氣凈化一體機:201520746775.3[P].2015-09-23.
[3] 李玉平.靜電式智能空氣凈化器系統設計[D].杭州:電子科技大學,2014:35-40.
[4] 湯云峰.空氣凈化器智能化系統的設計與實現[D].南京:東南大學,2015:23-30.
[5] 任俊龍.基于AVR單片機的空氣凈化器控制系統的硬件設計與實現[D].合肥:合肥工業大學,2010:40-45.
[6] 徐邦,王俊.基于ARM處理器的空氣凈化器控制系統設計[J].機電一體化,2015(7):54-57.
Design of Control and Detection System for the Combined Household Robot of IntelligentAir Purifier and Sweeper
XIAO Qijun1,LI Shengyong2,ZHANG Junjie2
(1.School of Electronic and Electrical Engineering,Zhaoqing University,Zhaoqing,Guangdong 526061,China;2.Xiamen Comfort Science and Technology Group Limited Liability Company,Xiamen,Fujian 361008,China)
The control system for the combined household robot of an intelligent air purifier and sweeper are developed to achieve double functions of cleaning ground and air dust.On the basis of elaborating the main functions of the system,the hardware and software of the control system are designed,mainly including sensor data acquisition,communication,human-computer interaction,stepping motor drive for sliding and stretching doors and purifier control system for fan,electrostatic adsorption and anion.The system is highly intelligent and dust concentration parameters in the room can be monitored.And the sweeping machine can be automatically controlled to clean rooms and be recharged.Based on the mathematic model to calculate the thickness of floor dust,the collaborative control between the purifier and sweeping machine is realized.Prototype of the robot can achieve high efficient,energy-saving cleaning and purification for indoor environment.
purification and sweeping;the combined machine;control system;dust thickness;system design
TP29
A
1009-8445(2017)05-0027-05
2017-05-10
廣東省公益研究與能力建設專項基金資助項目(2015A010103018)
肖奇軍(1975-),男,湖南衡陽人,肇慶學院電子與電氣工程學院副教授,博士.
(責任編輯:陳 靜)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
