基于繼電反饋的組合積分系統參數辨識與整定
2017-11-01 15:23:09閆子豪任正云陳安鋼
石油化工自動化 2017年5期
閆子豪,任正云,陳安鋼
(東華大學 信息科學與技術學院,上海 201620)
基于繼電反饋的組合積分系統參數辨識與整定
閆子豪,任正云,陳安鋼
(東華大學 信息科學與技術學院,上海 201620)
將一種改進型的繼電辨識方法推廣到組合積分系統的參數辨識中,取代了以一階或二階加純滯后模型近似描述組合積分系統進行參數估計的方法,在得到估計參數的基礎上設計了組合積分控制器。利用相角偏移的概念,補償繼電試驗中振蕩點與被控對象的極限環理論臨界點之間的偏差,辨識得到頻域范圍內的組合積分對象的參數,并且辨識精度較高;通過相角偏移的在線計算,避免了多次迭代試驗獲取先驗信息的過程,縮短了調節時間。仿真結果驗證了該算法的實用性和有效性。
組合積分 參數辨識 參數整定 相角偏移
工業過程中,大多數過程對象通常被近似為一階加純滯后(FOPDT)或二階加純滯后(SOPDT)模型。組合積分系統[1-2]作為近年來被提出的一種新型的流程工業系統,在過去很長的一段時間內被近似為上述兩種過程對象之一。雖然,這種近似處理使得PID[3]和Smith預估器[4]以及預測PI[5]等算法能在該種對象的控制上取得一定的效果,但是模型近似導致的控制精度、魯棒性無法進一步提高,限制了資源的高效利用。同時,工業設備結構老化和作業環境改變會引起系統參數漂移,從而使得控制效果惡化。為了解決控制的局限性,應對參數變化,改善控制效果,針對組合積分系統的參數辨識與自整定控制器的研究是十分有必要的。
20世紀90年代Astrom等[6]提出利用繼電反饋的方法提取系統的臨界信息,進而設計了PID自整定控制器。Luyben在此基礎之上,提出了ATV(auto tuning variation)方法[7],該方法將繼電試驗得到的臨界信息與理論上的臨界信息近似,推導得到模型參數并設計控制器參數。由于簡單直接,該方法也成為了工業應用中標準的繼電辨識方法。但是,試驗得到的臨界信息與理論上的臨界信息之間的誤差積累導致了辨識精度始終不高。因此,許多學者提出了改進的方法來減少這種近似誤差,但改進方法大都以增加實驗迭代次數或者辨識結構復雜度來提高辨識精度。
2006年,Wang等[8]在標準繼電辨識方法的基礎上,提出了“相角偏移”的概念,找到了繼電試驗中實際振蕩信息與臨界信息的關系,消除了臨界值近似誤差,避免了多次迭代實驗,縮短了調節時間,提高了辨識精度。對于一般時滯系統而言,以一階或二階加純滯后模型描述系統,并利用該方法進行參數辨識,可得到非常準確的估計參數。但對于組合積分系統而言,利用該方法始終無法求得以一階或二階加純滯后模型描述系統的估計參數。
因此,筆者提出了基于繼電反饋的組合積分系統的參數辨識,運用“相角偏移”的概念,實現了組合積分系統多個參數的單次辨識,并且辨識精度較高。同時,設計了控制器并整定了控制器參數。
1 繼電反饋的基本原理
繼電器反饋基本原理如圖1所示,圖1中過程對象即被控對象的輸入信號為u(t)和輸出信號為y(t),系統運行分為辨識和控制兩個部分。辨識過程中,繼電器的輸出作為過程對象輸入信號作用于過程對象,繼電器接收反饋信號,實現開關切換。

圖1 繼電反饋基本原理示意
辨識過程中,系統的輸出在工作點附近呈現頻率為ωosc的周期振蕩,即對應描述函數中的振蕩點。傳統繼電辨識根據描述函數近似的方法,將該點近似為系統臨界點,即ωosc≈ωu,ωu為臨界振蕩頻率。理論情況下,系統在臨界點會產生頻率為ωu的周期振蕩,當頻率ω=ωu時,∠G(jω)=-π,振蕩頻率ωosc與臨界頻率ωu存在的偏差以相角關系表示為∠G(jnωosc)=-π-δpn,n=1, 3, 5…。系統的描述函數的分析如圖2所示,系統振蕩點與臨界點的相角偏移為δpn。圖2中Im為虛軸,Re為實軸。
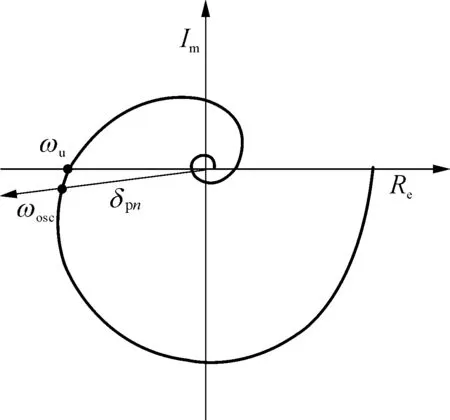
圖2 描述函數分析示意
2 相角偏移
根據文獻[3]中的定理,設繼電反饋系統滿足極限環條件,令
(1)
(2)
式中:Tosc——振蕩周期;n——諧波階數。
兩者均為非零常量,則系統開環Nyquist曲線上振蕩點和臨界點存在相角偏移,且
(3)
式中:n=(2k+1),k=0, 1, 2, 3…。
3 組合積分系統


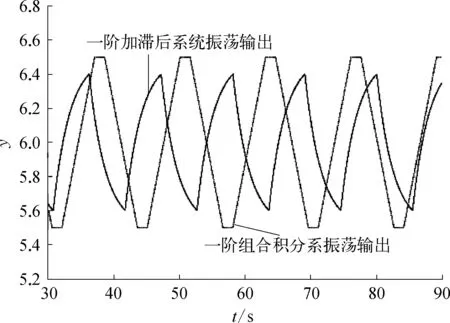
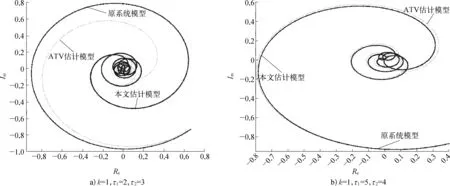
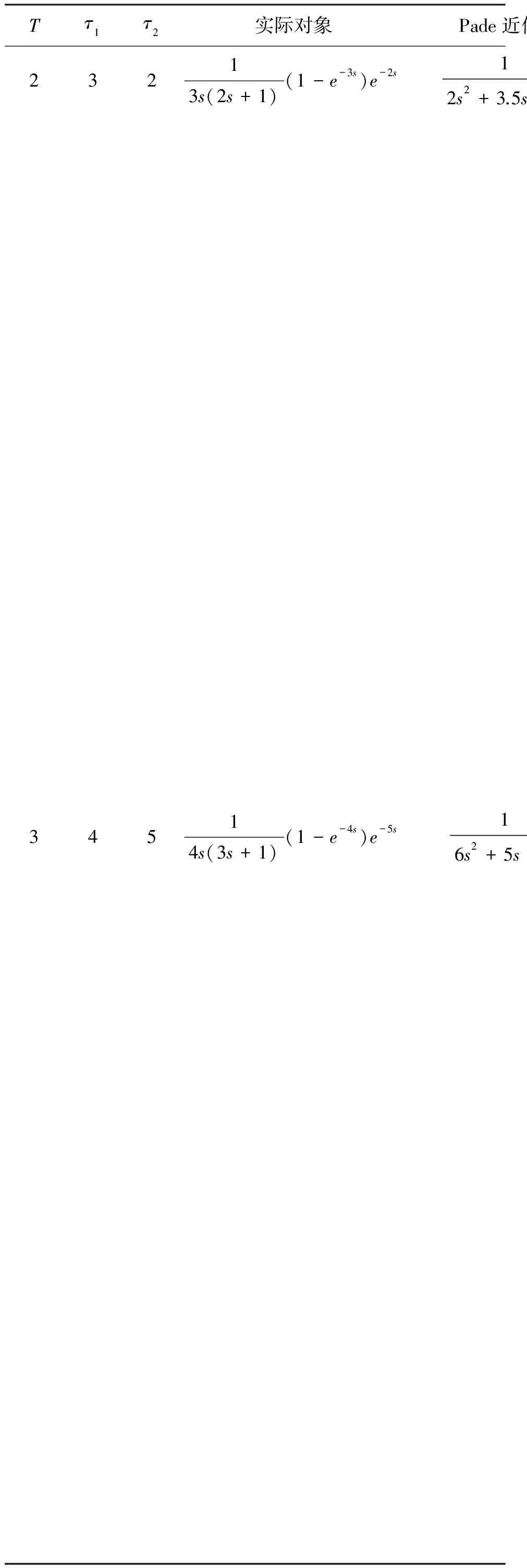
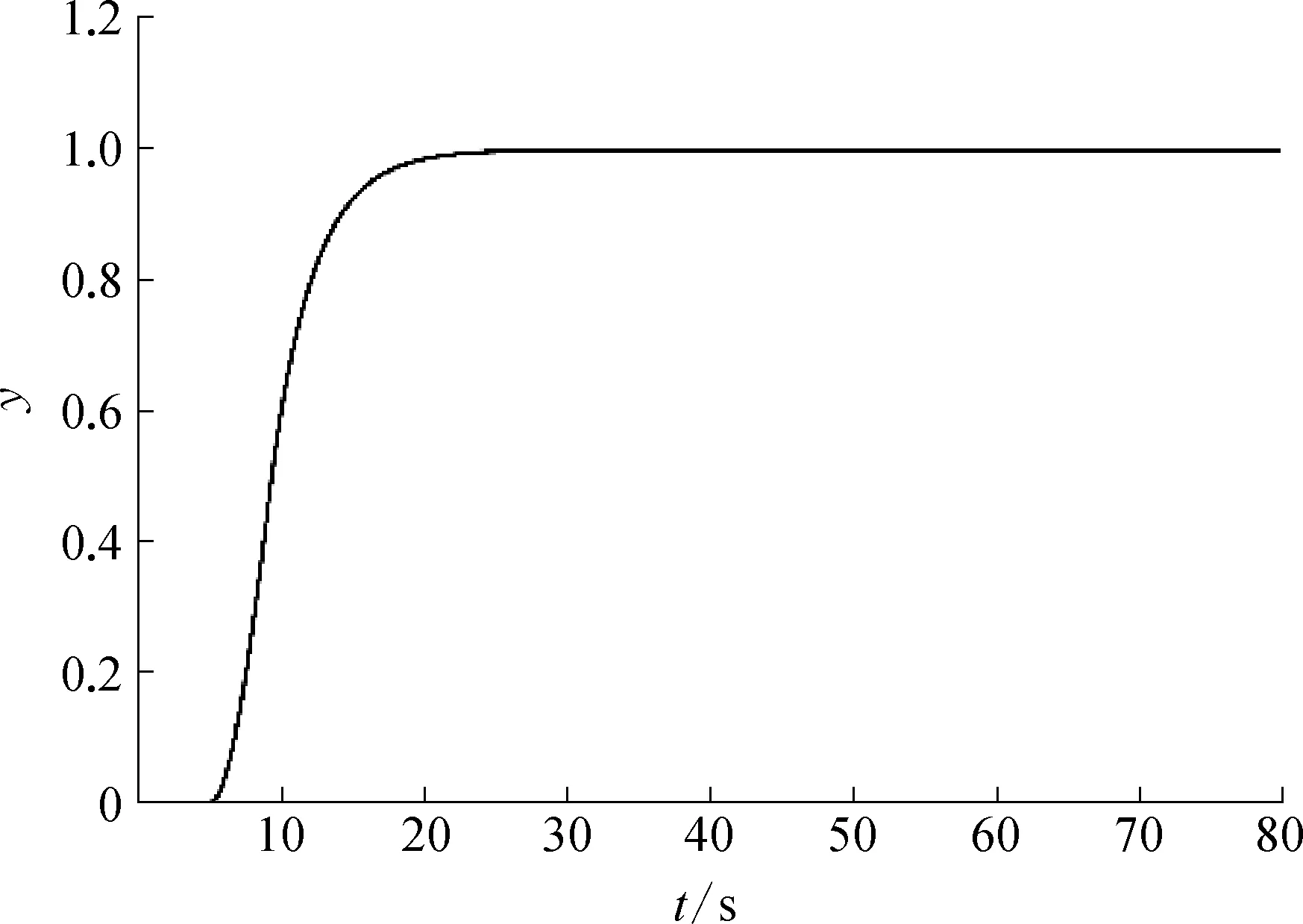
2) 時滯τ1i和τ2i必須滿足方程τ2i=τ2(i-1)-τ1(i-1), 1 這類對象同時含有非右半平面的極點和零點。從對象的時域特性可知,其同時具有積分特性和非最小相位的特性。 不失一般性,有如下1~5種典型的組合積分對象: (Ⅰ) (Ⅱ) (Ⅲ) (Ⅳ) (Ⅴ) 這些傳遞函數是根據測試得到的輸入、輸出數據建模而得到的;或者根據過程對象的機理特性分析得到的。 對于第二種組合積分對象(Ⅱ),假設系統在理想繼電器的作用下建立了周期振蕩,那么根據文獻[2]的定理可知: (4) 式中:Z——變換符號;z——z域算子。 理想繼電器作用下即d=1且ε=0,有H(T/2, -1)=0,可得理論振蕩周期,即: T0=τ1+2τ2 (5) 組合積分系統的特性不同于一階或二階加純滯后系統特性,在滿足建立極限環的條件下,振蕩波形輸出表明了兩者的特性差異,如圖3所示。第二種組合積分系統呈現典型的組合積分特性,其振蕩輸出為梯形波。解釋了對組合積分系統,以一階或二階加滯后模型近似描述系統時,利用相角偏移的辨識方法難以解得估計參數的情況。 圖3 組合積分系統振蕩輸出波形示意 在系統建立極限環的條件下,可通過分析振蕩波形得到振蕩周期Tosc和幅值Am并利用數值計算得到相角偏移δpn。最后,根據建立的頻域信息關系,推導系統參數。 下面主要介紹第四種組合積分對象(Ⅳ)辨識過程,其頻率特性為 (6) 通過相角偏移的補償,建立新的系統頻域關系,可表示如下3個式子: (7) (8) (9) 由式(7)~式(9)幅值關系,可得: (10) (11) (12) 由相角關系得到: (13) 式(7)~式(9)中的kn,n=1,3,5可由估計對象頻率響應利用數值計算得到,即 (14) 式中:h——理想繼電器輸出電平。 聯立式(10)~(14),由于上述方程均為超越方程沒有解析解,利用1STOPT最優化工具箱進行計算,可得到各個參數即k,τ1,τ2,T。對于第二種組合積分對象,推導方式同上,可增加1組約束條件即式(5),使得方程組不必分次求解,單次求解即可得到符合要求的解。 為了驗證算法的有效性,選幾組不同的組合積分對象模型試驗比較。 假設ATV先驗信息已知,對第二種組合積分對象進行參數辨識結果,見表1所列,由圖4的Nyquist曲線對比可知: 利用相角偏移方法辨識得到系統模型幾乎與實際系統重合,ATV方法辨識結果存在一定偏差。 對第四種組合積分對象,直接利用Pade近似模型與實際對象對比,參數辨識結果見表2所列。由圖5的Nyquist曲線對比可知: 相角偏移方法辨識得到的模型幾乎與實際系統重合,效果優于以Pade近似模型描述第四種組合積分對象。 表1 第二種組合積分對象的辨識結果比較 圖4 估計模型的Nyquist曲線比較示意 Tτ1τ2實際對象Pade近似模型相角偏移方法23213s(2s+1)(1-e-3s)e-2s12s2+3.5s+1e-2s0.98493.001s(1.9497s+1)(1-e-3.001s)e-1.9877s34514s(3s+1)(1-e-4s)e-5s16s2+5s+1e-5s1.00173.9986s(3.0111s+1)(1-e-3.9986s)e-4.7201s 圖5 Pade近似、估計模型Nyquist曲線比較 考慮第四種組合積分對象,由于組合積分對象具有良好的開環特性,當給定1個階躍時,系統能夠快速響應達到給定值。二階組合積分系統的階躍響應曲線如圖6所示。 圖6 二階組合積分系統的階躍響應曲線示意 為了使得整個閉環系統具有如圖6所示的良好特性,選擇所期望的閉環傳遞函數具有以下的結構形式: (15) 式中:λ,τ10,τ20——整定參數。當λ=1,開環的響應時間與閉環響應時間相同;當λ>1,開環的響應時間比閉環響應時間快;當λ<1,開環的響應時間比閉環的響應時間慢。這樣可以推導控制器傳遞函數: (16) 假定λ=1,τ10=τ1,τ20=τ2,k0=k,有 (17) 控制器在時間域的輸入、輸出關系為 (18) 式(18)第一部分為比例項,第二部分可以解釋為控制器在t時刻的輸出是由控制器在過去時間[t-(τ1+τ2),t-τ2]的輸出預測而得到。 考慮1個二階組合積分對象,利用IMC-PID[9],預測PI[5],PID[10],組合積分控制器進行仿真比較: (19) 根據辨識得到的參數,可知系統的傳遞函數,即: (20) 以上控制算法得到含有階躍干擾情況下的階躍響應曲線比較,如圖7所示。 圖7 標稱系統響應曲線示意 由圖7可見,組合積分控制器快速性優良,幾乎沒有超調,而IMC-PID與PID都或多或少存在一定的超調,并且調節時間較長。預測PI雖然無超調,但速度稍慢。總體而言,組合積分控制器的控制效果快速平穩。 本文將相角偏移的概念運用到組合積分系統的繼電反饋辨識中,避免了以一階或二階加純滯后模型描述組合積分系統進行參數辨識無法解得估計參數的問題。利用相角偏移補償繼電實驗振蕩 點與理論臨界值之間的偏差,從而消除了近似誤差。在不需要先驗信息的情況下,可辨識得到組合積分系統的多個參數,并在此基礎之上設計得到了組合積分控制器,且控制效果快速平穩。 [1] 任正云,鄭達.流程工業的組合積分系統及其先進控制[J].控制理論與應用,2009,26(09): 1009-1013. [2] 鄭達.組合積分系統的控制理論與應用研究[D].上海: 東華大學,2009. [3] 邵惠鶴.工業過程高級控制[M].2版.上海: 上海交通大學出版社,2003. [4] Smith O J M. A Controller to Overcome Dead Time[J]. Isa Transactions, 1959, 6(02): 28-33. [5] 任正云,邵惠鶴,張立群.幾種特殊動態特性對象的預測PI控制[J].儀器儀表學報,2004,25(05): 615-619. [6] ?str?m K J, H?gglund T. Automatic Tuning of Simple Regulators With Specifications on Phase and Amplitude Margins [J]. Automatica, 1984, 20(05): 645-651. [7] Luyben W L. Derivation of Transfer Functions for Highly Nonlinear Distillation Columns[J]. Ind. Eng. Chem. Res, 1987, 26(12): 2490-2495. [8] 王萍,顧誕英,張衛東.一種新的繼電自整定控制器設計方法[J].上海交通大學學報,2007,41(08): 1314-1319 [9] 孫功武,聶紅偉,蘇義鑫,等.時滯系統的二自由度IMC-PID控制研究[J].計算機應用研究,2014,31(08): 2357-2360. IdentificationandParameterTuningofCombinedIntegratingSystemBasedonRelayFeedback Yan Zihao, Ren Zhengyun, Chen Angang (College of Information Science and Technology, Donghua University, Shanghai,201620, China) An improved relay identification method is extended to parameter identification of combined integrating system. The parameter estimation method approximately describing combined integrating system with the first order or the second order plus dead-time model is replaced. A combined integrating controller is designed based on obtaining estimated parameters. Using the concept of phase angle offset, the deviation between the oscillation point in the relay test and the critical value of the limit cycles of the controlled object is compensated,as well as the parameters of the combined integrating object in the frequency domain are identified and the identification accuracy is higher than before. The process of obtaining a priori information by multiple iterations is avoided through online calculation of phase angle offset.The adjustment time is shortened. The simulation results verify the practicability and validity of the algorithm. combined integrating; parameter identification; parameter tuning; phase angle offset TP273 B 1007-7324(2017)05-0033-06 稿件收到日期: 2017-06-29,修改稿收到日期2017-07-20。 閆子豪(1992—),男,湖北宜昌人,在讀碩士研究生,主要從事先進過程控制方向的研究。



4 理論振蕩周期

5 組合積分系統的參數辨識





6 仿真結果與分析


7 組合積分控制器的設計






8 結束語
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
