市政排水管道清淤技術淺談
2017-11-01 07:35:59李婧琳緱變彩楊志遠
山西建筑 2017年27期
李婧琳 緱變彩 楊志遠
(1.武漢科技大學城市學院,湖北 武漢 430080; 2.武漢中地數碼科技有限公司,湖北 武漢 430070)
市政排水管道清淤技術淺談
李婧琳1緱變彩1楊志遠2
(1.武漢科技大學城市學院,湖北 武漢 430080; 2.武漢中地數碼科技有限公司,湖北 武漢 430070)
結合當前市政排水管道普遍存在的淤積堵塞現象,介紹了市政管道的絞車清淤法、高壓水射流清淤法、水沖刷清淤法等傳統清淤技術以及以蠕動式、履帶式、腳式和輪式四種方式行走機器人清淤新技術,通過對比分析,闡明了市政排水管道清淤技術發展的新方向。
排水管道,清淤技術,管道機器人
市政排水管道系統是當今城市非常重要的基礎設施,為了給人們提供一個安全舒適的生產和生活環境,排水管道系統就必須做到有效地收集和輸送生活污水、工業廢水和大氣降水,并及時可靠地將其排除,但是隨著城市的不斷發展以及管道的長期運行,淤積堵塞導致的排水不暢愈加嚴重[1],從而對城市的正常運行帶來很大的影響,在汛期甚至會引起嚴重的城市內澇。所以,對淤積物及時進行清理就顯得尤為重要。
1 傳統清淤技術
結合實踐經驗,傳統的管道清淤方法有以下三種,現分別進行介紹。
1.1絞車清淤法
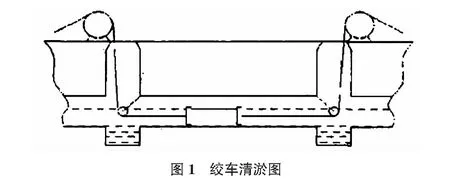
絞車清淤法也叫機械清淤法,該方法要求先用竹片穿過待清通管道,通過拖拽竹片一端,將系在竹片另一端的鋼絲繩帶動從而穿過管段。鋼絲繩中部綁定清通工具,兩端分別系在待清通管段的兩側檢查井上的兩臺絞車上,通過啟動絞車來回往復拉動鋼絲繩來帶動清通工具將淤泥刮至下游檢查井,然后用吸泥車吸走,其原理如圖1所示。
這種清淤方法能解決管道淤積嚴重,淤泥粘結密實的情況,而且能夠適應各種直徑的排水管道,所以在我國廣泛使用。存在的主要缺點是從一個井口向另一個井口穿竹片需人工下井完成,井下非常惡劣的工作環境給工人帶來極大不便,危害工人的健康,甚至會危及工人的生命。因此,只要穿鋼纜的問題能解決,這種方法還是比較有效的[2]。
1.2高壓水射流清淤法
這也是被廣泛采用的一種管道清淤法。通過用增壓車,將水加壓后送入射水噴頭沖洗管道壁,將管道內的沉積物沖到下游檢查井,再由吸泥車將其吸走。另一方面,由于污泥的存在,射水產生較大的反作用力,使射水噴頭及其攜帶的膠管同時向相反方向前進,從而實現連續作業。這種方法適用于各種口徑的下水管道,但由于用水量大,成本相對比較高[3]。
1.3水沖刷清淤法
起源于歐洲的排水管道水力沖刷技術現已相對成熟,該方法通過蓄水、瞬時排水兩個過程不斷循環,完成清淤工作。其中蓄水過程是將流經管道內的污水予以攔截,當蓄水量達到規定要求時,立即啟動排水過程,使得蓄水在瞬間排除,該過程形成強大的水流能對管底淤積物產生沖刷作用進而被帶走[4]。但是由于國內的排水管道源頭控制不善等原因造成污水中纏繞性垃圾較多導致蓄水不足、排水不暢而使其喪失既有功能。
2 機器人清淤技術
由于傳統的清淤方法存在的各種問題,工程師們開始尋求一種全新的清淤理念,清淤機器人應運而生。采用機器人進行清淤,是當前研究的一個熱點。管道機器人,是專為管道清淤作業而設計的一種新型機械設備,除機械部分以外,還設有監控通訊設備和清淤裝置,依靠這些先進技術,可以實現地面操作機器人在管道中行走并有針對性地完成清淤工作,解決傳統清淤工作的諸多難題,為更有效地完成排水管道的清淤疏通工作提供了新的解決方案[5]。
根據在管道內的行走方式不同,清淤機器人分為蠕動式、履帶式、腳式和輪式等,現分別對其加以介紹:
1)蠕動式清淤機器人。蠕動式清淤機器人由自身的結構相互配合,使其能夠像蚯蚓一樣利用腹部與管壁的摩擦前進,并以此摩擦力對管壁的污泥予以清理。但其要求管壁光滑,而我國大多數混凝土材料的排水管管壁相對粗糙,此方式并不適用[6]。
2)履帶式清淤機器人。履帶式清淤機器人是通過履帶行走,越障能力非常強,在泥濘的環境中也能移動,但是履帶的結構復雜,而且受到功率、負載和空間等條件的制約,履帶式管道機器人主要應用于中、大管徑的管道[7]。
3)腳式清淤機器人。由美國的Auotmatik公司研制,命名為ITGRE的腳式管道清淤機器人,其基本工作原理是通過腿推壓管道壁來支撐身體,再利用裝有彈簧的傾斜支撐臂把腿上的車輪緊壓在管道內壁上,使其產生預壓力,利用軟軸將扭矩作用使機器人向前行走[8],這種方式可以輕松地越過障礙物,便于在各種形狀的管道內行走,適合在400 mm~900 mm的可變直徑的管道中工作。由于其結構復雜,行走較慢,效率較低,尚處于理論研究當中。
4)輪式清淤機器人。輪式管道機器人由佛羅里達大學于21世紀初成功研發,命名為OPCR-OH,車輪緊貼管壁,對稱分布,對管壁產生較大壓力,爬坡力強,能沿著各個方向行走,應用較為廣泛。
清淤機器人通過以上四種方式實現在管道中行走,其目的是為了清理不同管段的淤泥,為了達到這一目的,機器人往往還需具備如清淤斗、清淤螺旋等除泥設備,這些設備通過自動控制進行作業,理論上能夠實現疏浚管道的目的。
除此之外,清淤機器人有效地作業還應滿足以下幾個要求:
1)在管道的污水和污泥環境中保持密閉,因此機器人本體一般會采用一體化箱體結構設計;2)需要電源,除了為機器人行走提供動力外,還向監控系統提供電源以及為清淤設備運行提供動力,往往采用內置蓄電池供電;3)需要通訊系統以便很好地對清淤機器人進行控制。為了減少電纜與管壁之間的摩擦,可采用無線通訊系統,機器人的作業行程及運動靈活性均得到提高[9]。
3 結語
我國排水管道清淤工作目前較多地采用傳統清淤方式,對于清淤機器人的研究和應用也在不斷進行,其發展有賴于機械以及通訊技術的進步,其使用將會大大提高清淤作業的自動化水平,改善傳統清淤技術的諸多弊端,具有廣闊的市場推廣前景。
[1] 李華飛.大管徑排水管道水力清淤技術研究[D].重慶:重慶大學,2012:2-3.
[2] 楊清梅,王立權,王知行.一種新型排水管道機器人研究[J].機床與液壓,2006(3):120-122.
[3] 邊艷玲,董 巍.排水管道中的清淤方法[J].黑龍江水利科技,2003(3):95.
[4] 劉振華,李懷正,董夢珂.排水管道沉積物水力沖刷技術[J].科技創新與應用,2015:1-2.
[5] 李成群,么鴻鵬,張凈霞.自主式管道清淤機器人的研究[J].機床與液壓,2015,43(15):51-52.
[6] Ma Jian Xu, Liu Xiang, Ma Jian Hua, et al. Microbionic and peristaltic robots in a pipe[J].Chinese Science Bulletin,2000,45(11):985-988.
[7] 么鴻鵬.自主式排水管道清淤機器人的研究[D].唐山:河北聯合大學,2012:7-10.
[8] 沈體強.城市排水管道清淤機器人研究綜述[J].山東工業技術,2016(20):289.
[9] 王 豐,秦保新,劉學東.無纜式城市排水管道清淤機器人的通訊設計[J].機床與液壓,2009(5):101-103.
Discussionondredgingtechnologyofmunicipaldrainagepipeline
LiJinglin1GouBiancai1YangZhiyuan2
(1.CityCollege,WuhanUniversityofScienceandTechnology,Wuhan430080,China;2.ZhongdiCyberTechnologyCo.,Ltd,Wuhan430070,China)
Combined with the current clogging of municipal drainage pipelines, the traditional dredging techniques and the robot dredging techniques are introduced. Traditional methods include mechanical dredging, high pressure water dredging and water scouring and dredging method. The new technology of dredging robot is carried out in four ways: crawling, caterpillar, foot and wheel. The new development direction of municipal drainage pipeline dredging technology is expounded by the contrast analysis.
drainage pipeline, dredging technique, pipeline robot
TU992.1
A
1009-6825(2017)27-0104-02
2017-07-13
李婧琳(1984- ),女,助教
