某加注連接器位姿補償機構設計及優化
2017-11-02 01:56:12李保平
導彈與航天運載技術 2017年5期
李保平,徐 華,何 慶
(1.南京理工大學機械工程學院,南京,210094;2.上海宇航系統工程研究所,上海,201109)
某加注連接器位姿補償機構設計及優化
李保平1,徐 華2,何 慶2
(1.南京理工大學機械工程學院,南京,210094;2.上海宇航系統工程研究所,上海,201109)
針對自動對接和隨動過程中連接器對接裝置與箭體之間產生的位姿偏差問題,設計了一種連接器位姿補償機構,并對機構的彈簧參數進行優化設計。驗證了該機構滿足對接要求的相關技術指標,在此基礎上,建立需要優化的設計參數、優化所需目標函數;利用ADAMS/View軟件提供的優化計算方法,分析了各設計參數對目標函數的影響,確定一組合理的彈簧設計參數。研究結果表明:該機構能很好地滿足自動對接要求,實現對接裝置與箭體之間的位姿補償。
自動對接;位姿補償;優化設計
0 引 言
運載火箭自動對接技術,可極大地縮短火箭等航天器的燃料加注準備時間,提高發射效率,消除工作人員直接參與對自身安全帶來的危險[1,2]。
國外經過長期研究,形成以美國為代表的“箭棲”對接技術和以俄羅斯為代表的“架棲”對接技術[3]。“箭棲”對接技術不能實現脫落后再次對接,而“架棲”對接技術則屬于剛性裝配,加注口只能位于箭體尾端。目前,中國仍采用人工對接方式,若要實現自動對接并克服以上對接技術的不足,在采用“架棲”對接技術的同時利用位姿補償機構的方法是一種可行的選擇。
運載火箭在加注時,會受到風載荷的影響導致未知的隨機晃動[4],造成箭上連接器面板具有6個方向的運動。由于執行機構存在制造誤差、控制誤差和延遲誤差等,因此造成對接裝置相對于箭體存在一定的滯后量,該滯后量需由位姿補償機構補償。由于3個轉動方向的轉角很小,自動對接執行機構選用具有3個平動自由度的3-PSS結構。位姿補償機構在總體結構中的位置如圖1所示。
1 位姿補償機構
1.1 位姿補償機構主要技術要求
a)位姿補償機構需具有6個自由度,實現全方位的補償功能。根據誤差分析,誤差補償機構在3個平移方向補償量取±8 mm,3個轉動方向角度補償量取±0.5°。
b)位姿補償機構對地面連接器面板具有一定的承載能力。在對接之前,地面連接器面板、鎖緊機構、各種單體連接器以及管路的總質量為35 kg左右,加上加注時液氧的質量可達50 kg左右。
c)根據設計指標要求,在對接和隨動過程中,箭上連接器面板受到的最大接觸碰撞力不超過3 kN。
d)由于地面連接器面板質量較大,在對接過程中會相對于執行機構的動平臺晃動產生一定位置偏差,該偏差量越小越有利于對接。
1.2 位姿補償機構的結構與工作原理
位姿補償機構整體結構如圖2所示。
由圖2可知,該機構主要由動平臺、4條相同結構的CCC(C指圓柱副)運動支鏈、地面連接器面板等組成。
運動支鏈間的連接方式為:前后滑移桿一端與half結構螺紋連接,一端與前后彈簧相連,同時前后滑移桿可沿筒軸線移動和繞筒軸線轉動,而筒軸通過螺栓組固定連接在動平臺上。上下滑移桿穿過half結構,上端與half結構間連有上下彈簧,可相對于half結構沿自身軸線移動和繞自身軸線轉動。左右滑移桿穿過上下滑移桿中間的孔結構,且兩端通過雙頭螺柱固定連接在地面連接器面板上。左右彈簧一端連在左右滑移桿上,一端與上下滑移桿中間結構相連。左右滑移桿相對于上下滑移桿可沿自身軸線移動和繞自身軸線轉動。
在每條運動支鏈中,彈簧都被套在滑移桿上,根據彈簧安裝位置,將彈簧分為前后、上下和左右3組。機構的初始狀態由3組彈簧的預載決定,而預載的調節則是通過調節螺母(調節端蓋)實現。
其工作原理是當地面連接器面板相對于動平臺發生位姿變化時,4條運動支鏈內的滑移桿會產生移動和轉動,壓縮或拉伸與之相連的彈簧,實現位姿補償。
1.3 位姿補償機構的自由度
位姿補償機構具有6個自由度,能在各個方向實現位姿誤差的補償。作為計算機構的自由度,可根據構件間的相對運動關系對機構進行簡化,其簡化結構如圖3所示。圖3中的件1、件2、件3、件4對應位姿補償機構的4根前后滑移桿,件5、件6、件7、件8對應位姿補償機構的4根上下滑移桿,位姿補償機構的4根左右滑移桿和地面連接器面板之間沒有相對運動,作為一個整體對應件9。
根據三維機構的Grubler˙公式[5],可得機構的自由度公式,即:
式中 l為機構中包含基座在內的構件總數,l=10;n為關節總數, 12=n ;id為關節i的自由度,id=2。
2 彈簧設計參數的優化
2.1 ADAMS參數化設計與優化計算簡介
模型的參數化是將模型中關鍵的具體數值用設計變量代替,通過修改設計變量來改變對應的數值量。優化設計是以模型的參數化為基礎,優化過程是當設計變量滿足一定約束要求和在設定范圍變化時,使目標設計達到最大、最小或最優。
ADAMS/View軟件提供了設計研究、試驗設計和優化分析3種優化計算方法。設計研究是研究單個設計變量對目標函數的影響;試驗設計是研究多個設計變量在不同組合的情況下對目標函數的影響;優化分析是設計變量在滿足約束方程的情況下,從設計目標的計算結果中選取最優結果[6]。
2.2 彈簧預壓力的確定
由于地面連接器面板及其附加質量很大,位姿補償機構會產生一定的偏轉,為了使地面連接器面板平行于動平臺,設計了3組彈簧的預拉力,以地面連接器面板及與其相連的左右、上下滑移桿整體為研究對象,在yz平面的受力情況如圖4所示。
圖4中,F1為單根上下彈簧的拉力,F2為筒內單根前后彈簧的拉力,G為地面連接器面板、附加結構以及上下、左右滑移桿的重力,A、B兩點在z方向的距離為b,在y方向的距離為L。由此建立靜力學平衡方程為
由式(2)、式(3)可得:
由于單根前后彈簧的預載為11 N,上下彈簧的預載為101 N,在x方向的地面連接器面板不受力,所以左右彈簧拉(壓)力為零。
2.3 在ADAMS/View軟件中建立機構的動力學模型
2.3.1 定義約束和驅動
將位姿補償機構的三維模型導入ADAMS軟件,并添加各個構件的材料屬性、質量屬性以及各構件之間的約束關系。彈簧分為3組,同一組彈簧的參數相同。具有相對運動的構件之間存在摩擦力,根據工程實際情況,取靜摩擦系數為0.11,動摩擦系數為0.08。
在對接過程中,動平臺會跟隨箭體做同樣的運動,而箭體擺動最嚴苛的情況是箭上連接器面板在 3個方向都做最大范圍的擺動。為了便于分析,假設箭體的擺動是一個周期運動。根據對箭體在最苛刻環境下的運動規律分析,可得到動平臺的驅動函數。驅動函數為
2.3.2 參數化設計變量
由于純彈簧的阻尼非常小,在仿真過程中,不考慮該參數,因此該參數取ADAMS軟件中的默認值。3組彈簧具有3組剛度系數,因此設立3個設計變量DV_1、DV_2和 DV_3,分別對應前后組彈簧、左右組彈簧和上下組彈簧。由于箭體單向受到最大作用力小于3 kN,考慮到摩擦力、慣性力等,為了安全起見,假設彈簧處于最大位移補償量時,前后組、左右組彈簧的合力應不超過最大作用力的 50%,由此可計算出前后組、左右組彈簧中單根彈簧剛度的取值范圍。
參數化設計變量的初始值及取值變化范圍如表 1所示。
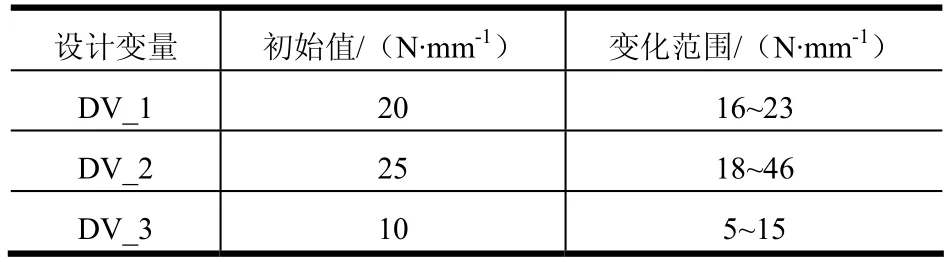
表1 設計變量初始值及取值變化范圍
2.3.3 定義技術指標的測量(函數)
由1.1節所述,在對接過程中,為提高對接精度,地面連接器面板與動平臺之間的偏差(相對位置變化量)越小越好。考慮到實際對接工況,在對接過程中,首先產生接觸碰撞的點在中導桿的最前端,因此取兩導桿前端點連線中心坐標點Marker_576與動平臺的中心點的偏差作為實際研究偏差,這樣既考慮了位置偏差,又考慮了地面連接器面板姿態偏差。
建立一個測量函數作為目標函數,其目標是找到實際研究偏差在x,y,z 3個方向分量的最大值。測量函數設置如圖5所示。
2.4 在ADAMS/View軟件中進行設計研究
箭體在x,y,z 3個方向的運動周期相同,而在豎直方向運動范圍非常小,相應的速度較緩慢,所以地面連接器面板在豎直方向受慣性力影響較小。為確定上下組彈簧的合理數值,在前后組、上下組彈簧取初始值的情況下,研究上下組彈簧的變化對目標函數的影響。設計研究結果如表2所示。

表2 上下組彈簧剛度對偏差的影響
由表2可知,上下組彈簧的剛度對最大偏差量影響非常小。在豎直方向,為減小對箭體的作用力,上下組彈簧的剛度越小越好;而上下組彈簧要承載地面連接器面板及其附加結構的全部重力,對彈簧剛度要求較大。綜合考慮以上因素及其彈簧的可壓縮長度,上下彈簧的剛度選為11 N/mm。
2.5 在ADAMS/View軟件中進行試驗設計
在上下組彈簧剛度確定的情況下,研究前后組、左右組彈簧剛度在不同取值條件下目標函數值的變化情況,根據最大位置偏差量的大小擇優選取彈簧的剛度。該優化是對多個設計變量產生變化時,研究設計變量不同組合時目標函數的取值情況應選擇試驗設計。兩個設計變量變化水平數均取8,需要進行64次試驗設計。將測量函數作為試驗設計的目標,其最大偏差量變化情況如圖6所示。
圖6中,每8個數據點為一組,共有8組,每組數據代表在DV_1中的數值不變,DV_2以等差數列遞增的情況下,最大偏差的取值情況。
由圖6可知,每組數據前4個數值變化較大,說明DV_2值在該數值范圍影響較大,而后4個數值相差不大,DV_2值應從后4個數值對應的范圍選取。由于剛度越小,箭體受力越小,所以DV_2選數組中對應的第5個數值。而DV_1的確定可只對比每組數據的第5個值,從圖6中看到從第3組開始,數值之間變化相差較小。最終確定DV_1、DV_2的參數為第3組第5個數值,即第21次仿真結果對應的取值。查對應的仿真數據表(見表3),可知DV_1=18 N/mm,DV_2=34 N/mm。
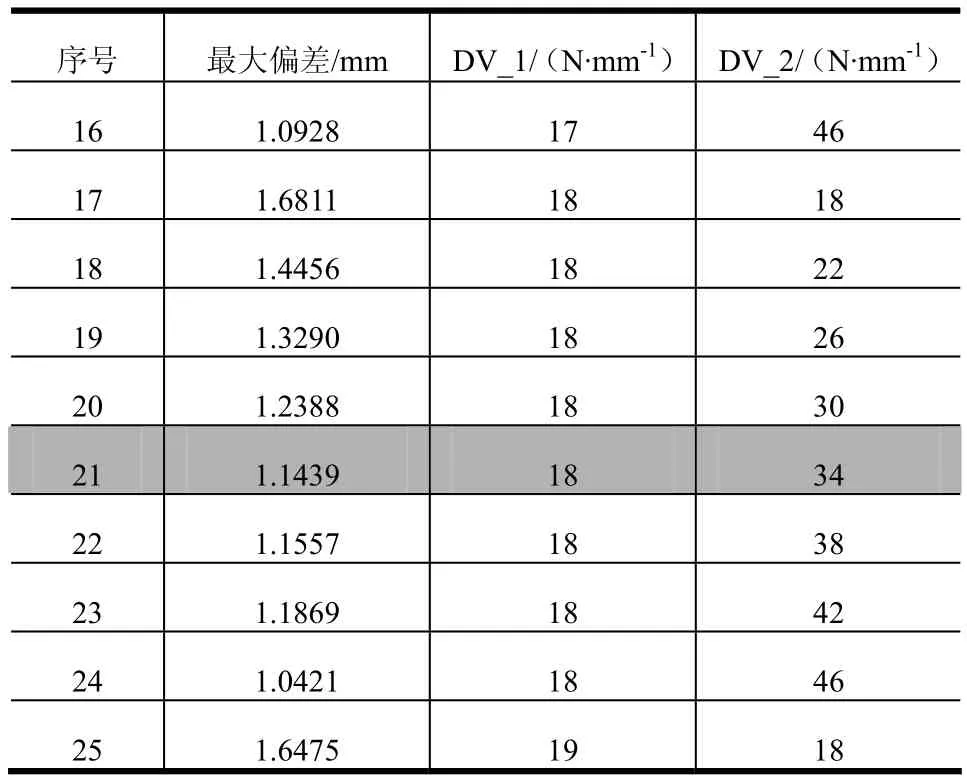
表3 試驗設計仿真數據
3 結 論
通過對位姿補償機構的分析和對建立的動力學模型進行優化計算,可以得到如下結論:
a)該位姿補償機構能滿足對接的技術指標要求;
b)得到了一組較合理的彈簧設計參數,使機構的綜合性能得到進一步提高;
c)本文描述的位姿補償機構為解決在對接和隨動過程中,對接裝置與箭上連接器面板間產生位姿誤差問題,提供了參考方法。
[1] 王立興. 俄羅斯火箭臍帶自動對接技術評析[J]. 航天發射技術, 2003(1):45-50.
[2] Gosselin A M. Automated ground umbilical systems project[R]. GOE Launch Site Design Engineering, 2007
[3] 聞靖, 頓向明. 推進劑加注自動對接與脫離機器人技術現狀與發展趨勢研究[J]. 機器人技術與應用, 2010(6): 20-22.
[4] 鄭國昆, 王小軍, 李道平. 基于運載火箭加泄連接器自動對接系統的控制流程研究[J]. 導彈與航天運載技術, 2015(1): 25-26.
[5] 梅萊 J P. 并聯機器人[M]. 北京: 機械工業出版社, 2014.
[6] 陳志偉, 董月亮. MSC Adams多體動力學仿真基礎與實例解析[M]. 北京: 中國水利水電出版社, 2012.
Design and Optimization of a Position and Pose Compensation Mechanism of Fuel Loading Connector
Li Bao-ping1, Xu Hua2, He Qing2
(1.School of Mechanical Engineering, Nanjing University of Science & Technology, Nanjing, 210094;2. Shanghai Institute of Aerospace Systems Engineering, Shanghai, 201109)
A connector position and pose compensation mechanism is designed and the spring parameters of it are optimized, the position and pose deviation between connector docking device and rocket in the process of auto-docking and follow-up is eliminated.The related technical indicators is verified , the design parameters is determind and the objective function is optimized. Then with the optimization calculation method provided by ADAMS/View, the influence of design parameters is analyzed. A series of reasonable design parameters are determined. The results show that the mechanism can meet the requirements of automatic docking and realize the compensation of the position and pose between the docking device and the arrow.
Automatic docking; Position and pose compensation; Optimization design
TP65
A
1004-7182(2017)05-0080-04
10.7654/j.issn.1004-7182.20170520
2016-01-21;
2017-09-02
上海航天科技創新基金(SAST201410)
李保平(1989-),男,碩士研究生,主要研究方向為機械結構設計
圖6 最大偏差量變化情況
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
