一種基于粒子群優化(PSO)算法的全局快速終端滑模控制方法
2017-11-03 00:52:14郝春玲
電子器件 2017年5期
郝春玲
(渤海船舶職業學院機電工程系,遼寧 葫蘆島 125100)
一種基于粒子群優化(PSO)算法的全局快速終端滑模控制方法
郝春玲*
(渤海船舶職業學院機電工程系,遼寧 葫蘆島 125100)
為了減小六軸機械臂運行時的震動,提高控制系統的響應時間,基于PSO智能算法對其進行全局優化控制,將機械臂系統離散成6個子系統,分別設計各個子系統,并且基于Lyapunov理論驗證控制系統的穩定性。仿真結果表明,采用PSO算法對六軸機械臂進行運行軌跡控制時具有精度高、運行誤差小及收斂周期短的優點,切實提高了控制系統的響應速度及控制精度。
智能機器人;PSO算法;六軸機械臂;終端滑模控制
隨著科技的不斷進步,以及時下較為流行的工業4.0,機器人逐漸體現了其特有的優勢,對其進行智能控制成為了國內外學者的研究熱點,文獻[1-3]闡述了基于模糊控制策略調整PID值,表現出了較好的魯棒性。由于機器人的動作具有時空上的非線性,各類因素間具有極強的耦合性等特性,以及內部與外部的各類影響因素對其產生了較大的干擾,影響了其控制精度以及相應速度。文獻[4-6]提出基于滑模控制來對具有極強非線性的各類系統均具有較優異的控制性能。近年來,滑模控制被應用于各行各業,均表現出了較為優異的性能,其主要是基于通過采集的各類輸入因素實際值來進行具體的反饋控制,使得輸出值與實際需要的控制變量得到較好的符合度。文獻[7-8]基于二階滑模算法對具有3個自由度的機器人進行運行軌跡控制,并與傳統PID控制算法作了對比分析。文獻[9]基于非線性的滑模算法對機器人進行非線性控制,大幅提高了其控制精度。
文獻[10-12]基于自適應滑模模糊控制算法以及更高階的算法對機械手臂進行智能控制,具有較好的魯棒性。但是,此類算法即使能夠提高控制魯棒性,但其在控制過程中需要循環往復的切換,導致被控系統出現較大的抖動,造成了跟蹤誤差的大幅增加。對于工業機器人的應用中,軌跡跟蹤出現較大誤差時,會導致整個系統的精確度受到較大的影響。對于此問題,衍生出較多新的控制算法,如將人工智能神經網絡算法進行改進,可大幅減小系統震動所產生的誤差。
綜上,為了進一步提升控制系統的響應速度以及大幅降低被控系統的振動,基于一種粒子群算法對六自由度的機械手進行全局滑模控制,并得到了系統的響應時間,仿真結果經過實驗數據驗證了其具有較高的精度。
1 控制系統建模
1.1 數學模型
機械臂剛體的線加速度[13]
(1)
機械臂剛體的角加速度為:
vA=UVAORG
(2)
慣性張量如式(3):
(3)
ωA=UΩA
(4)
關節計算力矩如下:
(5)
Ixx=?v(y2+z2)ρdv
(6)
Iyy=?v(x2+z2)ρdv
(7)
Izz=?v(x2+y2)ρdv
(8)
Ixy=?vxyρdv
(9)
Ixz=?vxzρdv
(10)
Iyz=?vyzρdv
(11)
旋轉關節的計算公式為:
(12)
移動關節公式為:
(13)
機械臂動力學方程的結構狀態空間方程為:

(14)
形位空間方程表達式為:

(15)
笛卡爾狀態空間方程為:
(16)
1.2 滑模控制器設計
設單關節的常規全局快速終端滑模控制器的滑模面函數如下:
(17)
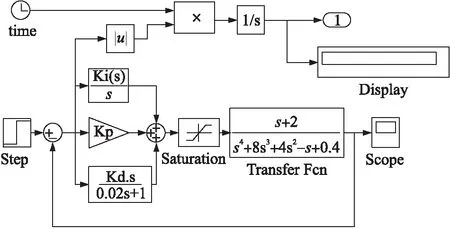
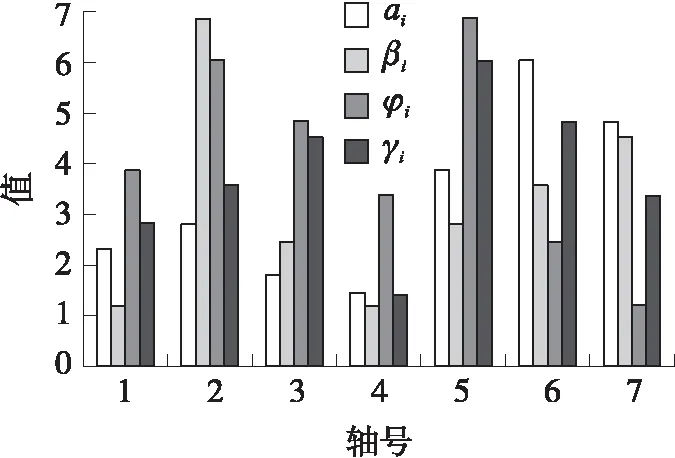
式中:Q (18) 定義Lyaounov函數: (19) (20) 本文3個通道均為二階系統,則得控制器為: (21) 此時可以根據 (22) (23) 算出收斂時間ts以及到達滑模面的時間tsn-1。 其中,一種具有遞歸結構的快速滑動模態表示為: (24) 式中:ai,βi>0,Pi,Qi(Pi>Qi) (i=0,1,…,n-2)為正奇數。 基于PSO算法[14-15]對機械臂進行滑模優化控制步驟如下: 假設種群大小N=3,在搜索空間中隨機初始化每個解的速度和位置,計算適應函數值,并且得到粒子的歷史最優位置和群體的全局最優位置。 gBest=pBest1=(-5,9) (25) 步驟2:粒子速度以及位置的更新 (26) 式中:w是慣量權重,一般取[0,1]區間的數,這里假設為0.5,c1,c2為加速系數,取2.0,r1,r2為[0,1]區間上的隨機數。 在Simulink環境下建立的模型如圖2所示,圖2中,微分環節由一個一階環節近似,輸出端口1即為式(2)所示的ITAE指標,通過將時間及誤差絕對值的乘積進行積分后得到。 3.1 仿真研究 基于六自由度實驗臺的實測數據驗證本文所提動力學模型及控制算法的精確度,如圖1所示,基于全局終端快速滑模算法對各個關節進行粒子群算法仿真計算。 圖1 基于PSO優化的全局快速終端滑模系統 確定優化結果范圍,由上述模型可知,系統運行達到平衡時所需時間為t=ts+tr;由上述分析可知增大αi,βi的值,可提升控制系統的響應速度,但是其過快的響應速度會導致被控機械臂運行時發生較大的震動,此時可通過調節其βi,φi來對機械臂的震動的幅度加以控制與調節,基于機械臂自身所具有的力學性能,將其控制輸出量設置為τi∈[-10,10]N·m。為了選取最為合適的輸出控制范圍,將其范圍設定在[0,10]之間,粒子群算法的粒子數為25個,設定其最大迭代次數為100。采取單軸單次優化的模擬方法對機械臂進行優化計算,并且將其他軸設置為0,將機械臂逐步進行優化計算之后,停止。 經過圖2的仿真過程以后,六軸機械臂運行優化計算結果如圖4所示,圖4表明機械臂運行仿真經過十次迭代呈現出收斂趨勢。 圖2 仿真計算流程 圖3 軸1優化函數曲線 圖4 PSO優化滑模參數 當仿真計算過程經過精度判斷達到停止條件后,最終得到六軸機械臂的最優運行軌跡參數。 3.2 實驗研究 本次實驗是基于Googol公司生產的,數據采集周期為0.002 s/次,此類控制系統可與各類型PLC進行連接,此聯合工作可大幅提升控制精度以及響應速度,可與DSP技術完美接口,實驗系統實物如圖5所示。 圖5 CPAC硬件結構圖 圖6 基于PSO優化全局快速終端滑模實驗結果 圖6表明了實測數據結果,基于本文所提的控制算法對六軸機械臂進行終端全局滑模運行控制時表現出了較快的響應速度,避免了六軸機械臂系統在運行時出現系統超負荷調節的不良現象,從而減小了六軸機械臂運行時產生較大的摩擦,造成不可逆的損壞,針對機械臂處于穩態運行時,其輸入與輸出值均表現出了良好的性能。 實測值與設定值符合度較好,經過仿真優化以后的誤差范圍控制在1°~4°之間,由此可以得到本文所提算法具有控制響應速度快,超調幾率小以及系統運行軌跡精度較高的優勢。 圖7、圖8均表明了本文所提控制算法的輸入輸出值均表現出了優異的性能,實測值與設定值符合度較好,在系統各個軸有輸出力矩時,經過優化以后的控制系統具有較好的控制性能,并且可以快速進行切換,因此,本文所提控制算法對于六軸機械臂運行軌跡的運行精度具有較為準確的定位精度,在應用機械臂進行工業生產操作時,具有較高的精度。 圖7 各關節控制器輸入輸出值 圖8 各關節控制器輸入輸出值 本文對六軸機械臂在工業生產過程中精確控制提出了基于機械臂自身特性,離散成6個被控子系統,采用全局滑模終端控制對其進行精確運行控制,驗證了采用粒子群算法對六軸機械臂進行運行軌跡控制時具有較高的精度,具有較短的系統提升試件,運行誤差較小以及控制系統收斂周期較小的優點,切實提高控制系統的響應速度及控制精度。 [1] Ott E,Grebogi C,Yorke J. Controlling Chaos[J]. Physical Review Letters,2012,64(11):1196-1199. [2] Pecora L M,Carroll T L. Synchronization in Chaotic Systems[J]. Physical Review Letters,2013,64(8):821-824. [3] Bogris A,Argyris A,Syvridis D. Encryption Efficiency Analysis of Chaotic Communication Systems Based on Photonic Integrated Chaotic Circuits[J]. IEEE J of Quantum Electronics,2012,46(10):1421-1429. [4] Wang L P,Liu W,Shi H. Noisy Chaotic Neural Networks with Variable Thresholds for the Frequency Assignment Problem in Satellite Communications[J]. IEEE Trans on Systems,Man,and Cybernetics—Part C:Applications and Reviews,2014,38(2):209-217. [5] Buscarino A,Fortuna L,Frasca M,et al. Design of Time-Delay Chaotic Electronic Circuits[J]. IEEE Trans on Circuits and Systems—Ⅰ:Regular Papers,2011,58(8):1888-1896. [6] Zhang H G,Ma T D,Huang G B,et al. Robust Global Exponential Synchronization of Uncertain Chaotic Delayed Neural Networks via Dual-Stage Impulsive Control[J]. IEEE Trans on Systems,Man,and Cybernetics—Part B:Cybernetics,2015,40(3):831-844. [7] Moez F. Sliding Mode Control and Synchronization of Chaotic Systems with Parametric Uncertainties[J]. Chaos,Solutions and Fractals,2016,41(3):1390-1440. [8] Hornik K,Stinchcombe M,White H. Multilayer Feed Forward Networks are Universal Approximates[J]. Neural Networks,1989,2(5):359-366. [9] Huang M Z,Ma Y W,Wan J Q,et al. Simulation of a Paper Mill Wastewater Treatment Using a Fuzzy Neural Network[J]. Expert Systems with Applications,2012,36(3):5064-5070. [10] Furuta K. Sliding Mode Control of a Discrete System[J]. Systems and Control Letters,1990,14(2):145-152. [11] Lu T C,Lee C C,Hisa W Y. Supporting Large-Scale Distributed Simulation Using HLA[J]. ACM Transactions on Modeling and Computer Simulation,2013,10(3):268-294. [12] Boukerche A,Hoy A,Thomas N. Dynamic Grid-Based Multicast Group Assignment in Data Distribution Management[C]//International Workshop on Distributed Simulation and Real-Time Applications. SanFrancisco:IEEE,2012:108-115. [13] 錢雪平,趙沁平. 基于關聯空間的數據過濾方法[J]. 計算機學報,2012,25(7):723-729. [14] 王君洪,陳躍東,陳孟元. 基于模糊認知圖的智能配電網WSNs實時性與可靠性優化研究[J]. 傳感技術學報,2016,29(2):214-215. [15] 湯辰,萬衡. 基于服務機器人的人體追蹤技術的研究[J]. 電子器件,2015,38(6):1398-1399. AGlobalFastTerminalSlidingModeControlMethodBasedonParticleSwarmOptimizationAlgorithm HAOChunling* (School of Mechanical and Electrical Engineering,Bohai Shipbuilding Vocational College,Huludao Liaoning 125100,China) In order to eliminate the chattering and improve the response speed of the system. This paper deals with a fast terminal sliding mode control method based on PSO(particle swarm optimization)for the six manipulator control system. Then stability of the system is demonstrated by Lyapunov theory and the optimization control parameters are achieved based on PSO algorithm. The simulation results show that the PSO algorithm has the advantages of high precision,low running error and short convergence period when the trajectory control of the six-axis manipulator is carried out,thus the response speed and control precision of the control system are all improved. intelligent robot;PSO;6-DOF manipulator;global fast terminal sliding mode 10.3969/j.issn.1005-9490.2017.05.048 2016-07-22修改日期2016-11-03 TP24 A 1005-9490(2017)05-1304-05 郝春玲(1978-),女,黑龍江人,漢族,大學本科,工程碩士,副教授,研究方向為機械自動化,gouchezx@163.com。



2 PSO優化機械臂滑模控制系統



3 仿真及實驗結果






4 結束語

猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
當代工人(2020年8期)2020-05-25 09:07:38
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
家庭影院技術(2017年9期)2017-09-26 03:41:45
