翼傘系統在未知風場中的歸航控制
2017-11-20 03:44:14陶金孫青林檀盼龍鄔婉楠陳增強賀應平
航空學報 2017年5期
關鍵詞:系統
陶金, 孫青林,*, 檀盼龍, 鄔婉楠, 陳增強, 賀應平
1.南開大學 計算機與控制工程學院, 天津 300350 2.中德應用技術大學 電氣與能源學院, 天津 300191 3.中國航空工業集團公司 宏偉航空器有限責任公司, 襄陽 441000
翼傘系統在未知風場中的歸航控制
陶金1, 孫青林1,*, 檀盼龍2, 鄔婉楠1, 陳增強1, 賀應平3
1.南開大學 計算機與控制工程學院, 天津 300350 2.中德應用技術大學 電氣與能源學院, 天津 300191 3.中國航空工業集團公司 宏偉航空器有限責任公司, 襄陽 441000
翼傘系統在未知風場中執行歸航任務時,需獲得風場的大小和方向信息,以便在歸航過程中利用或者消除風場的影響。為實現翼傘系統在未知風場中精確歸航與逆風雀降著陸,首先提出一種利用全球定位系統(GPS)定位數據和最小二乘法在線辨識風向和風速的方法,然后將風場中平均風的影響在軌跡規劃中予以考慮,設計分段歸航路徑;將突風作為外界干擾,在軌跡跟蹤過程中由線性自抗擾控制(LADRC)器進行觀測和補償。最后通過仿真實驗驗證了本文所提出的歸航控制方法對于提高翼傘系統在未知風場中的歸航精度和抗風能力有重要意義。
翼傘系統; 未知風場; 風向辨識; 歸航軌跡; 軌跡跟蹤; 線性自抗擾控制(LADRC)
翼傘系統是一種擁有高升阻比氣動性能、出色滑翔能力、良好操控性和穩定性的精確空投系統,一般由沖壓型翼傘、負載和控制器組成。鑒于其諸多的優點,翼傘系統在眾多的領域得到應用。如在現代化戰爭中,地面作戰部隊可以通過翼傘空投實現武器、彈藥、給養的及時補充;在發生重大自然災害時,可以通過翼傘精確空投的方式第一時間將救災物資和設備運輸到災害中心,完成緊急救援任務;在航空航天領域,大型翼傘系統可用于航天飛船、衛星等設備的安全回收;在民用領域,翼傘系統可用于運動、觀光、農業植保等。近些年來,隨著全球定位系統 (Global Position System,GPS)導航技術的成熟、測量技術和控制科學的發展,使得翼傘系統的自主歸航控制研究方興未艾[1]。
翼傘是由柔性紡織材料制成,在充氣張滿后飛行速度較低,因此易受到風場影響[2-3]。翼傘系統在執行歸航任務時,有針對性的設計對風場處理的控制策略有助于提高翼傘系統的歸航精度,保障其穩定飛行。實施雀降操縱要將翼傘系統逆風對準目標點[4-5]。以上工作的基本前提是風場已知,因此研究風場辨識方法對于實現精確歸航具有重要意義。
翼傘系統的歸航控制方法一般包括簡單歸航法、最優控制歸航法和分段歸航法。最早開展研究的是以徑向歸航、錐型歸航為代表的簡單歸航方法,其控制簡單,但是著陸的精度很大程度上取決于初始投放位置,且無法保證逆風[6]。目前研究較多的是最優控制歸航法和分段歸航法。最優控制歸航法是在最優控制理論基礎上發展起來的一種歸航方法,通過優化翼傘系統的控制序列達到逆風雀降、能量最優的精確著陸。然而大多數的最優或者次優控制歸航方法都停留在理論研究階段[7-8]。分段歸航法在20世紀90年代后在工程中被大量研究和應用,其主要思路是將翼傘系統整個歸航軌跡按照不同的階段和特點進行分段,然后根據最終著陸的要求對各段的參數進行優化。雖然分段歸航法不能實現能耗最優,但分段軌跡可以進行準確的參數化描述,便于實現軌跡跟蹤控制。文獻[9-11]對分段歸航法有所介紹,但是基本上只有分段的描述,沒有提及如何實現的問題。文獻[12]給出了具體的分段軌跡規劃方法,但在研究過程中沒有考慮風場大小和方向的影響。
控制策略的選擇很大程度上取決于翼傘系統所采用的歸航方法。針對簡單歸航,通常采用遞推控制法來控制翼傘系統。最優歸航法同時確定軌跡和控制量,一般采用開環控制方法。針對分段歸航方案,需設計軌跡跟蹤策略,典型的翼傘系統軌跡跟蹤控制成果主要有文獻[12]通過將翼傘系統的航跡跟蹤問題簡化為線性系統的輸出跟蹤問題,采用增益調節型模糊比例-微分(Proportion Differentiation,PD) 控制算法設計了航跡跟蹤控制器。文獻[13]利用拉格朗日插值法得到期望輸出航向,并將模型預測控制的方法應用于翼傘系統軌跡跟蹤控制。文獻[14]將L1自適應控制方法應用在大型翼傘的航跡跟蹤控制中。在實際翼傘空投應用中,ALEX型翼傘空投系統使用了簡單的比例控制器進行歸航控制[10];Pegasus翼傘空投系統也使用了比例-積分-微分(Proportion Integration Differentiation,PID) 算法進行軌跡跟蹤控制[15]。在軌跡跟蹤研究中,通常的做法是將風的影響整個的看做外界的干擾來處理,由控制器加以修正。需要指出的是,控制器的抗風性能總是有一定限度的,風速過大會導致翼傘攻角過大或過小,造成系統失穩。因此,在歸航控制策略設計中,針對性的對風場進行處理是必要的。
為克服未知風場對翼傘系統歸航精度產生的影響,本文首先針對風場辨識問題,提出了一種基于僅利用GPS定位信息進行在線風場辨識的方法,然后在歸航軌跡規劃中考慮辨識的風向和風速信息,在軌跡跟蹤控制中,將離散突風作為外界干擾,設計一種基于線性自抗擾控制(Linear Active Disturbance Rejection Control,LADRC)的軌跡跟蹤控制器進行修正。仿真結果驗證了本文所提出的未知風場中翼傘系統歸航控制方法的可行性和有效性。
1 翼傘系統動力學模型
由于傘繩、吊帶和連接帶所選用的材料通常強度大、形變小,因此可忽略各繩索發生的彈性形變,從而限制了傘體和負載之間的相對滾轉運動,只考慮兩體之間的相對俯仰和相對偏航運動,建立翼傘系統八自由度動力學模型[16],包括傘體的六個自由度和負載的兩個相對傘體的轉動自由度。
令Vp=[upvpwp]和Wp=[ppqprp]分別表示傘體的速度和角速度,Vw=[uwvwww]和Ww=[pwqwrw]分別表示負載的速度和角速度。利用動量和動量矩定理分別對傘體和負載進行分析,得
(1)

(2)
(3)
(4)
式中:下標p和w分別表示傘體和負載;上標aero、f、g和t分別表示氣動力、摩擦力、重力和吊繩拉力;F和M分別為力和力矩。
傘體和負載的動量P和動量矩H表示為
(5)
(6)
式中:Aa和Ar分別為傘體的附加質量和真實質量矩陣;mw和Jw分別為負載的質量和轉動慣量。
傘體和負載通過繩索連接,兩者之間存在的約束關系為
Vw+Ww×Lw-c=Vp+Wp×Lp-c
(7)
Ww=Wp+τp+κw
(8)
式中:τp=[0 0ψr],κw=[0θr0],ψr和θr分別為傘體和負載的相對偏航角和相對俯仰角;Lw-c和Lp-c分別為負載質心和傘體質心到負載上兩個懸掛繩的中心點C的距離。
聯合式(1)~式(8)可以得到翼傘系統的八自由度的動力學模型,詳細的建模推導過程參見文獻[16]。
2 風場辨識方法

V、V0和Vf共同組成了翼傘系統在風場中的運動矢量三角形,根據圖中所示的矢量關系可以得到
(9)
式中:Vx和Vy分別為V在x軸和y軸方向的速度分量;Vf,x和Vf,y分別為Vf在x軸和y軸方向的速度分量。
對式(9)中的兩部分進行平方求和,并在翼傘系統的運動軌跡上取3個點,假設風速Vf不變,又因翼傘系統的空速V0是不變的,地速V可以通過GPS模塊定位獲得,進一步推導可得
(10)
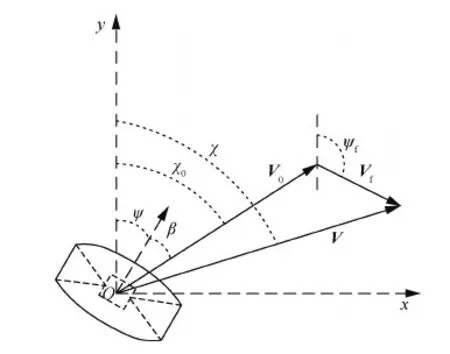
圖1 翼傘系統速度矢量關系圖 Fig.1 Velocity vectors diagram of parafoil system
式中:Vi(i=1,2,3) 為位置點i相應的地速,Vxi和Vyi分別表示Vi在x軸和y軸方向上的速度分量。
至此,風場辨識即轉化為求解二元一次方程組的問題,方程組的解即為風速在坐標軸的分量,表示為
(11)
引入帶遺忘因子λ的最小二乘法實現對風場辨識結果的迭代更新,可得到風場辨識的更新公式。具體的推導過程見文獻[5]。
3 分段歸航軌跡規劃
3.1 分段歸航策略
利用辨識的風速和風向信息,在大地坐標系下對翼傘系統歸航軌跡進行分段設計。考慮風場的最終作用效果,將整個飛行過程中風的影響轉化為最終著陸目標點的偏移和著陸方向的偏轉。因此,在初始投放高度確定的情況下,水平面的軌跡規劃就是以虛擬目標點Gf為規劃目標點,選擇合適的圓弧和線段的組合。本文選擇一種經典的分段歸航策略[12]進行改進,如圖2所示。圖中,A點為翼傘空投系統的初始投放位置,Gr為實際著陸目標點,Gf為虛擬規劃目標點,β1、β2、β3和β4分別表示分段軌跡AB、CD、DE和EF所對應的圓心角,γ為風場方向,兩目標點連線GfGr與x軸的夾角也為γ,兩目標點之間的距離可表示為
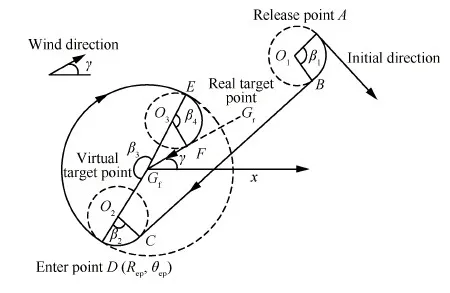
圖2 分段歸航軌跡規劃 Fig.2 Multiphase homing trajectory planning
(12)
式中:t0為投放初始時刻;tf為著陸時刻,對于投放高度h已知的情況下,tf=h/vz,其中vz為翼傘系統平均下降速度。
分段軌跡優化的關鍵在于確定翼傘系統進入能量控制階段DE的切入點D的位置,可用能量控制階段圓形軌跡的半徑Rep和虛擬目標點Gf和D點的連線與x軸的夾角θep來表示。翼傘系統歸航軌跡規劃的目的是實現著陸點與目標點距離最小,并在著陸時刻逆風,據此分段軌跡目標函數J定義為
J=|Rmin(β1+β2+β4)+Repβ3+

(13)

綜上,利用大地坐標系下各分段的幾何關系,將翼傘系統分段歸航軌跡規劃問題轉化為參數優化問題。
3.2 優化算法
由于目標函數J定義為隱函數,無法顯式表達,且被優化參量為實數,數目較少,因此所選用的優化算法應具有較好的搜索能力和精度以及較高的魯棒性。本文選用一種改進的粒子群優化(Modified Particle Swarm Optimization,MPSO)算法作為J的優化算法。
在基本PSO中,初始種群通常為隨機選取,當可行解空間較大時,不能保證初始粒子均勻分布,因此會減弱算法的全局搜索能力。算法在尋優過程中遇到局部極值,非常容易致使所有粒子都飛入該極值點停滯不前導致算法早熟[17-18]。這時就需要在算法中加入擾動,使部分粒子跳出局部極值點。
混沌優化算法具有對初值不敏感、易跳出局部極值、全局漸近收斂的特點[19]。混沌優化算法是把混沌變量從混沌空間映射到可行性解空間,然后利用混沌變量的遍歷性進行搜索。本文提出的MPSO主要利用混沌算法在以下兩方面改進基本PSO:① 混沌初始化種群代替隨機初始化種群,使得初始粒子分布更加均勻;② 在最優解周圍的區域內進行混沌迭代,以增強種群粒子的多樣性,防止算法進入早熟。
本文采用Logistic混沌映射
Pi,N=4Pi-1,N(1-Pi-1,N)
(14)
式中:i=2,3,…,L,L為混沌初始化的種群數量;Pi,N為i×N維的隨機數。
4 基于LADRC的軌跡跟蹤控制
4.1 基于制導的2D軌跡跟蹤策略
計算跟蹤軌跡誤差時,借鑒Breivik和Fossen提出的基于制導的路徑跟蹤的概念[20],采用基于制導的2D軌跡跟蹤策略設計翼傘系統軌跡跟蹤的制導律,如圖3所示。
假設跟蹤目標是參考軌跡上的運動目標點pp,而pp的位置是按照尺度變量?更新的,表示為pp(?)=[xp(?)yp(?)]T,其變化率表示為
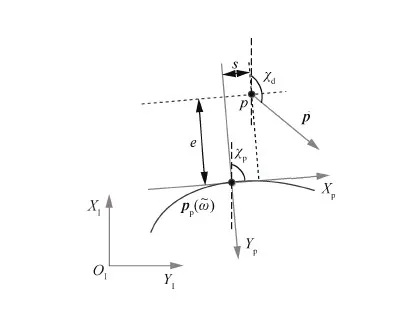
圖3 基于制導的2D軌跡跟蹤策略示意圖 Fig.3 Geometric sketch of 2D guidance based trajectory tracking scheme


(15)

以pp的運動方向為x軸建立參考軌跡坐標系,為了將慣性坐標系下的描述轉到參考軌跡坐標系下進行描述,建立旋轉矩陣
(16)
因此,任意點p到參考軌跡點pp的距離誤差表示為

(17)

利用關于誤差的李雅普諾夫函數可以證明在軌跡跟蹤過程中,其前向誤差s和橫向誤差e滿足一定的約束條件是收斂的,具體證明過程見文獻[20]。
對于翼傘系統來講,在軌跡跟蹤過程中的參考目標點pp對參考速度和尺度變量進行更新可以實現前向誤差s的消除,因此只需設置橫向控制器控制翼傘系統的偏航角ψ跟蹤給出的參考方向角就能消除橫向誤差e。
4.2 LADRC控制器設計
ADRC是由中科院的韓京清研究員提出的一種新型控制方法。ADRC繼承了PID不依賴于被控對象數學模型的優點,通過采用擴張狀態觀測器估計系統擾動,將系統擾動補償為串聯積分型,從而實現擾動抑制[21]。 ADRC最初是以一種非線性形式提出的,具有較多的整定參數,不易調試。隨后,美國克里夫蘭州立大學的高志強教授通過帶寬參數化的方法,將ADRC簡化為LADRC,易于調試和工程實現[22]。近些年來,ADRC以其良好的控制效果,在多個領域得到了推廣應用[23-25]。
翼傘系統與跟蹤軌跡之間的橫向誤差可以通過控制翼傘系統偏航角ψ進行消除,結合翼傘系統動力學方程,可得如下形式的翼傘系統偏航角的二階形式:
(18)
式中:f1(·)為關于翼傘系統狀態變量的表達式;f2(u)為含有控制量u的表達式。
為了便于LADRC控制器的設計,將式(18)改寫為

(19)
令f=f1(·)+f2(u)-b0u,將f視為翼傘系統總擾動,構造翼傘系統航跡方位角的線性擴張狀態觀測器(Linear Extended State Observer, LESO),利用LESO估計出翼傘系統當前航跡方位角、方位角的變化率及整個系統的總擾動,再通過誤差狀態反饋控制率的動態補償,從而實現對翼傘系統航跡方位角的跟蹤控制。
由于實際系統狀態觀測器存在瞬態響應極值,為避免系統輸出飽和,引入飽和限幅函數sat(·),限幅方式選取
(20)

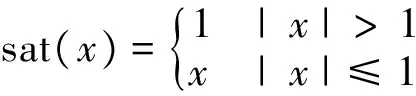
(21)
5 仿真實驗
5.1 仿真環境設置
作為仿真實例,本文選用某一實際空投翼傘進行仿真實驗,具體參數如表1所示。
根據所選的傘型,其初始運動參數為:初始速度(u,v,w)=(15.9,0,2.1) m/s,初始歐拉角(ξ,θ,ψ)=(0,0,0),初始角速度(p,q,r)=(0,0,0)。
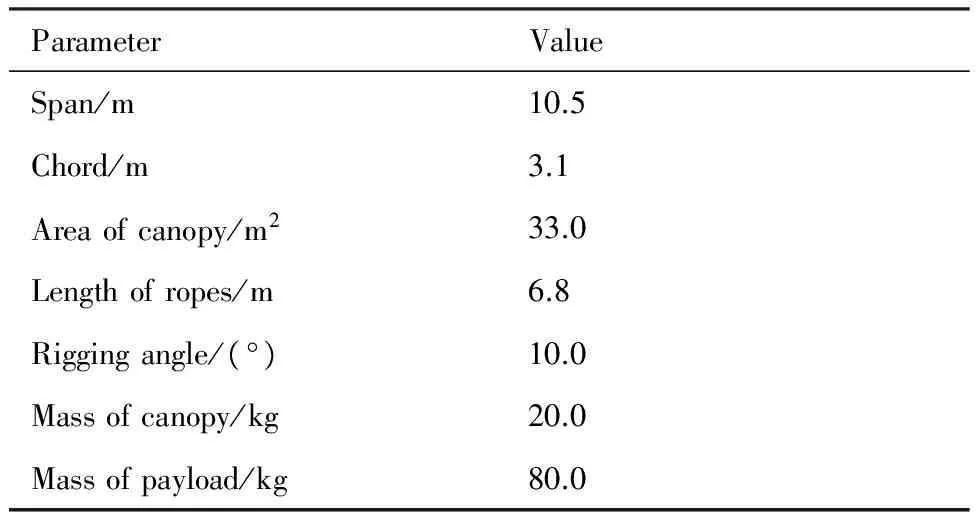
表1 翼傘系統參數Table 1 Parameters of parafoil system
為驗證翼傘系統在未知風場中的歸航控制方法,設置以下4種初始工況進行翼傘系統歸航仿真實驗,如表2所示。表中:(x0,y0,z0)為翼傘系統初始空投位置,α0為翼傘系統初始速度方向,(xf,yf,zf)為在仿真環境中加入的風場,這里,風場的大小和方向對于執行歸航任務的翼傘系統是未知的,需要通過風場辨識的方法獲得。設置著陸目標點為(0,0,0)。為了驗證控制器的抗擾性,在115 s時刻向仿真環境中加入最大風速為3 m/s,方向沿y軸正向的NASA離散突風[26]。
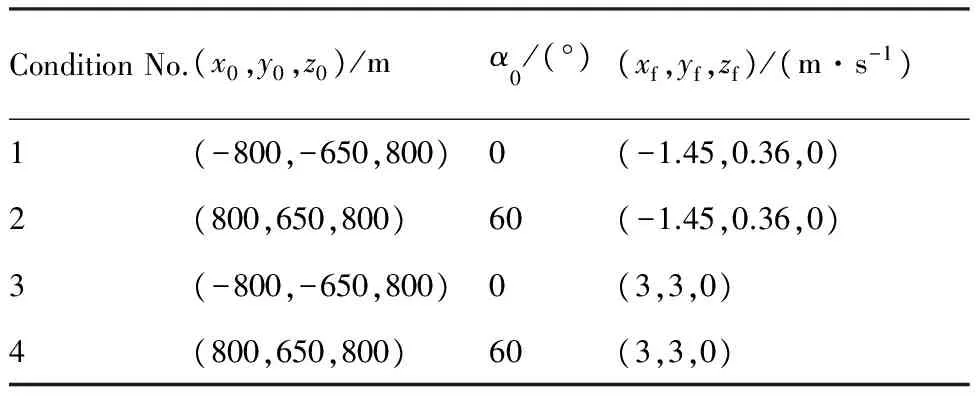
表2 初始工況Table 2 Initial conditions
MPSO參數設置如下:混沌初始化種群規模為100,種群規模為50,最大迭代次數為100;Rep的搜索空間為[245,500] m,θep的搜索空間為[-π,π],擾動量設置為0.1。
采用本文構建的LADRC控制器與相同結構的PID控制器分別控制翼傘系統進行軌跡跟蹤,最大控制量M=5。LADRC控制器的參數設置為:LESO帶寬ωo=30,kP=0.18,kD=1,b0=0.04。PID控制器的參數設置為:kP=20,kD=100,kI=0.2。
5.2 工況1仿真結果
5.2.1 風場辨識
根據風場辨識原理,可在線辨識出翼傘系統在穩定轉彎時的風速和風向,如圖4所示。
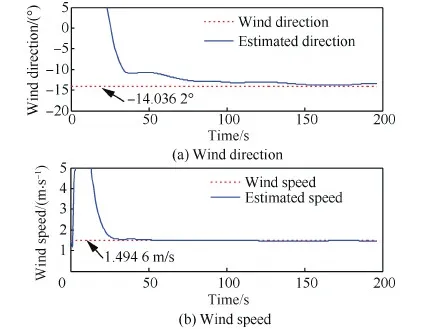
圖4 風場辨識結果 Fig.4 Wind identification results
在使用最小二乘法進行遞推更新時,所有的參數在初始化過程中設為0,因此在初始前25 s辨識值都是無效數據。從30 s開始風速和風向就能達到穩定的辨識效果。風向辨識結果的最終誤差小于0.5°,風速辨識結果的最終誤差小于0.1 m/s。可知,該風場辨識方法在風速和風向上均有較高的辨識精度。
5.2.2 分段軌跡規劃
根據風場辨識結果,風向角γ=-14°,規劃目標點Gf=(-400,100) m,基于MPSO優化所得的分段歸航軌跡最優參數為Rep=330.3 m,θep=1.2 rad。規劃出的分段歸航軌跡如圖5所示。從圖中可看出,該分段歸航軌跡能夠實現翼傘系統在設定初始狀態下的定點精確歸航并在著陸時刻實現逆風對準。由于不考慮風場的中間作用效果,所規劃歸航軌跡為標準的圓弧和直線的組合,便于參數化,易實現跟蹤控制。
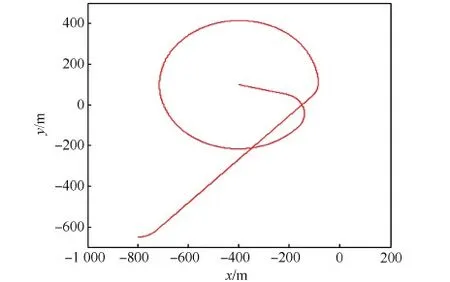
圖5 分段歸航軌跡 Fig.5 Multiphase homing trajectory
5.2.3 軌跡跟蹤控制
分別利用LADRC和PID控制器在仿真風場環境中進行軌跡跟蹤控制,圖6~圖8所示為仿真結果。
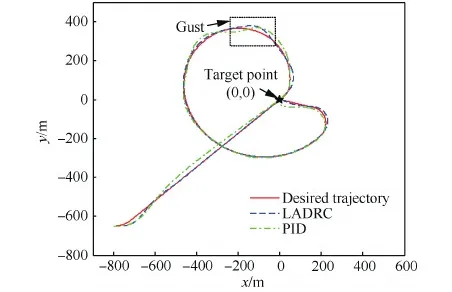
圖6 平面軌跡跟蹤效果 Fig.6 Trajectory tracking results on horizontal plane
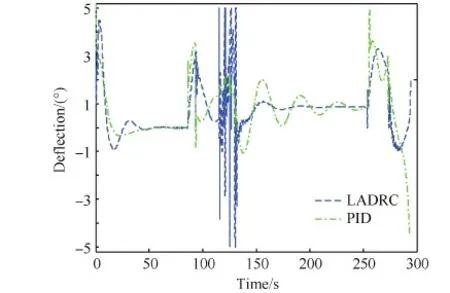
圖7 下偏操縱量 Fig.7 Deflection output
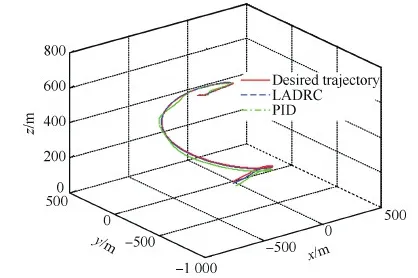
圖8 三維空間軌跡跟蹤效果 Fig.8 Trajectory tracking result in 3D space
圖6為風場作用下理想分段歸航軌跡以及LADRC和PID控制器控制翼傘系統跟蹤規劃軌跡在大地坐標系的效果圖。由圖中可知,兩種控制器均能在風場影響下取得較好的軌跡跟蹤效果。由于實際風場的影響貫穿了整個歸航過程,翼傘系統跟蹤軌跡隨風場發生了一定的偏移,導致實際跟蹤軌跡并不是由標準的圓弧和直線組成。由于平均風的影響在軌跡規劃中予以考慮,在軌跡跟蹤時可完全忽略,將突風視為外界干擾,在軌跡跟蹤階段由控制器修正。LADRC控制器將這種干擾作為系統的總擾動通過LESO進行觀測并動態補償,實現跟蹤誤差修正。從軌跡跟蹤效果來看,LADRC控制器比PID控制器具有更高的軌跡跟蹤精度。尤其在加入橫向突風干擾后,兩種控制器水平面軌跡都會有所偏移,跟蹤誤差增大,但LADRC控制器具有更快的跟蹤誤差收斂速度。LADRC控制器最終著陸偏差為2.3 m,而PID控制器著陸偏差為27.3 m。
圖7為兩種控制器輸出的下偏操縱量曲線。其中,LADRC控制器輸出在突風作用下產生震蕩,在突風消失后迅速穩定,而PID控制器輸出則處于較長時間的波動狀態。
圖8為翼傘系統三維空間下軌跡歸航效果。從圖中可以看出,翼傘系統在三維空間內能夠較好的跟蹤規劃歸航軌跡。一般來講,傳統的飛行器可對航跡傾斜角進行控制,但對于翼傘系統而言,由于雙側下偏操縱對翼傘系統縱向下降速度影響不大,翼傘系統以固定的航跡傾斜角向前做滑翔運動,由于在歸航軌跡規劃中充分考慮了翼傘系統的運動特性,因此翼傘系統歸航軌跡與規劃軌跡在縱向面也能夠較好的吻合。
圖9~圖12為LADRC控制器控制翼傘系統跟蹤歸航軌跡過程中的狀態變化情況。
圖9為翼傘系統速度變化曲線。從圖中可以看出,在整個歸航過程中,翼傘系統的速度基本保持不變,其水平速度基本維持在11.1 m/s,垂直速度保持在2.8 m/s,在水平突風擾動下,其水平速度和垂直速度均發生了一定程度的震蕩,這是由于翼傘系統水平面運動和縱向面運動存在著強耦合導致。由于慣性的存在,負載的水平速度和垂直速度在過渡階段和風擾階段總是略大于傘體的水平速度值。
圖10為翼傘系統歸航過程中滾轉角變化曲線。由圖可知,翼傘系統的滾轉角僅在疊加突風作用時,波動較大,在穩定轉彎或滑翔時,基本保持穩定。圖11為翼傘系統俯仰角和相對俯仰角變化曲線。從圖中可知,在翼傘系統歸航過程中,傘體俯仰角基本穩定在-6.2°,負載與傘體之間的相對俯仰角維持在7.1°。在突風作用下,系統俯仰角震蕩劇烈,相對俯仰角小幅波動。圖12為翼傘系統在歸航過程中的偏航角和相對偏航角變化曲線。從圖中可知,其偏航角隨著分段軌跡規律的變化,受突風影響較小;負載和傘體之間的相對偏航角則保持穩定,但在突風作用時產生高頻振蕩。
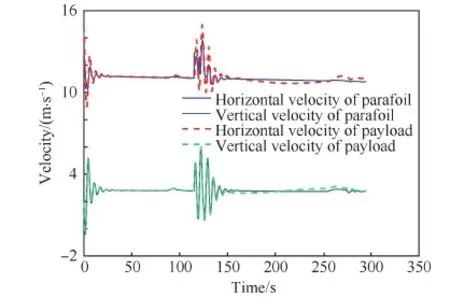
圖9 速度變化曲線 Fig.9 Changing curves of velocities
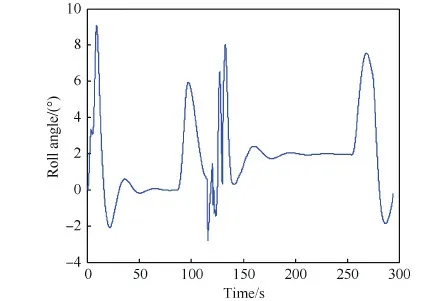
圖10 滾轉角變化曲線 Fig.10 Changing curves of roll angle
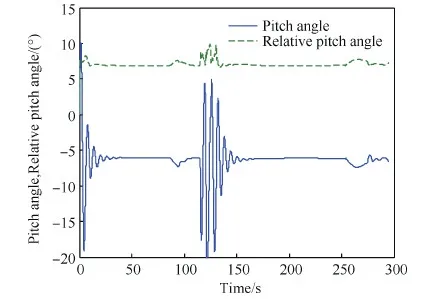
圖11 俯仰角與相對俯仰角變化曲線 Fig.11 Changing curves of pitch angle and relative pitch angle
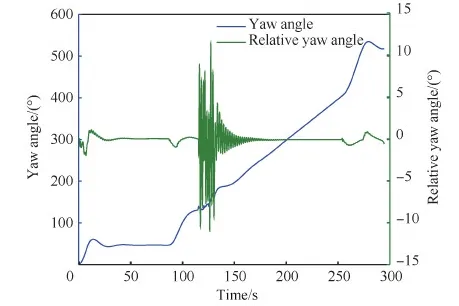
圖12 偏航角與相對偏航角變化曲線 Fig.12 Changing curves of yaw angle and relative yaw angle
綜上可知,翼傘系統在歸航過程中可以保持自身姿態穩定,沒有出現失速或失穩狀況。
5.3 其他工況仿真結果
為簡單起見,這里僅給出工況2~4下仿真得到的辨識風場的大小Vf和方向角γ,分段歸航軌跡最優參數Rep和θep,以及分別利用LADRC和PID控制器進行軌跡跟蹤控制最終著陸誤差,如表3所示。
從表3中數據可以看出,風場對于翼傘系統歸航精度的影響很大,隨著風場強度的增大,著陸誤差有增大的趨勢。而采用本文提出的歸航控制策略,在任一工況下,翼傘系統均能夠較好跟蹤規劃好的歸航軌跡準確的飛向目標點,且在目標點位置實現逆風對準。

表3 歸航結果Table 3 Homing results
5.4 對比實驗
作為比較,采用文獻[12]提及的常用控制策略,即軌跡的規劃在大地坐標系下進行,將風的影響整個的看做外界的干擾,與本文提出的歸航控制策略相比,兩者的區別在于對穩定平均風的處理。采用與3.1節類似的忽略所有風場影響的分段軌跡規劃方案以及5.1節相同的LADRC和PID控制策略分別在表2所示的4種工況下進行歸航實驗,歸航最終結果如表4所示。
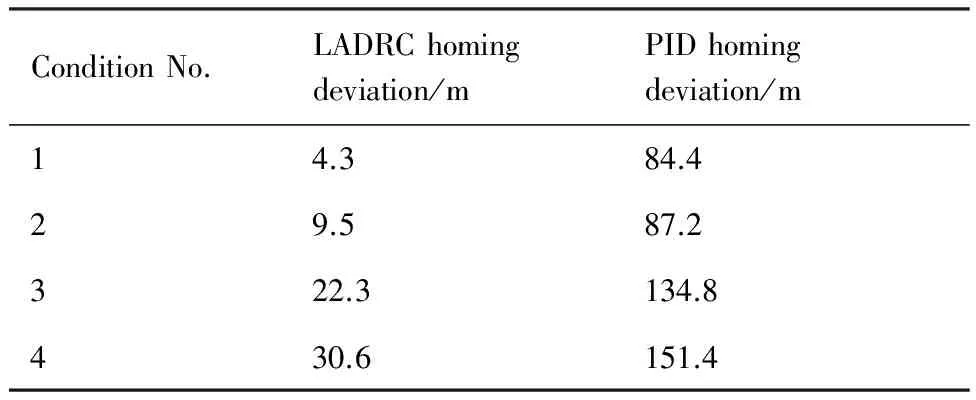
表4 常用控制策略歸航結果Table 4 Results of homing with common control strategy
從表4中可以看出,采用普通歸航控制方法,LADRC和PID控制器也都能實現一定精度的歸航。與本文提出的歸航控制策略相比,采用普通歸航方法,兩種控制器的歸航偏差均增大。其中LADRC控制器的著陸偏差增幅較小,這得益于LADRC控制器良好的抗干擾能力。而PID控制器著陸偏差增幅較大,這是由于平均風的強干擾導致的。平均風與突風不同,其作用時間長,對翼傘系統而言,其對軌跡的影響僅依靠控制系統一般是難以消除的。因此,本文提出的歸航控制方法可以減小風場尤其是較大風場擾動下對軌跡跟蹤控制的影響和由此帶來的系統失穩,對于提高翼傘系統的抗風性能和著陸精度有重要意義。
6 結 論
1) 通過GPS定位數據計算得到翼傘系統的飛行速度和方向,通過速度矢量三角形,采用最小二乘法實現了對風速和風向的在線辨識,仿真結果表明,該風場辨識方法可以有效準確的辨識出未知風場的風速和方向信息。
2) 考慮環境中風速和風向信息,對翼傘系統歸航軌跡采用分段設計方法,引入虛擬著陸點的概念,將整個飛行過程中風的影響轉化為著陸目標點的偏移和著陸方向的偏轉,仿真結果表明,基于風場的歸航軌跡規劃方法能夠規劃出滿足歸航精度和逆風著陸的要求歸航軌跡。
3) 借鑒基于制導的翼傘系統2D軌跡跟蹤策略,通過李雅普諾夫方法得出了翼傘系統飛行的制導律,將對平面軌跡的跟蹤問題轉化為對翼傘系統航跡方位角的控制問題,并設計了基于LADRC的翼傘系統軌跡跟蹤控制器。仿真結果表明,基于LADRC的軌跡跟蹤控制器能夠克服環境干擾,實現歸航軌跡快速平穩跟蹤,比PID控制器具有更好的控制精度和魯棒性。
4) 本文提出的一整套歸航控制方法較好的利用或消除了未知風場的影響,提高了翼傘系統歸航過程中的抗風能力和著陸精度。
[1] YAKIMENKO O A. Precision aerial delivery systems: Modeling, dynamics, and control[M]. Reston: AIAA, 2015: 2-16.
[2] 朱旭, 曹義華. 翼傘平面形狀對翼傘氣動性能的影響[J]. 航空學報, 2011, 32(11): 1998-2007.
ZHU X, CAO Y H. Numerical simulation of planform geometry effect on parafoil aerodynamic performance[J]. Acta Aeronautica et Astronautica Sinica, 2011, 32(11): 1998-2007 (in Chinese).
[3] 朱旭, 曹義華. 翼傘弧面下反角、翼型和前緣切口對翼傘氣動性能的影響[J]. 航空學報, 2012, 33(7): 1189-1200.
ZHU X, CAO Y H. Effects of arc-anhedal angle, airfoil and leading edge cut on parafoil aerodynamic performance[J]. Acta Aeronautica et Astronautica Sinica, 2012, 33(7): 1189-1200 (in Chinese).
[4] 張興會, 朱二琳. 翼傘系統雀降性能及控制研究[J]. 航天控制, 2012, 30(1): 29-33.
ZHANG X H, ZHU E L. The study of the flare-landing performance and control of parafoil system[J]. Aerospace Control, 2012, 30(1): 29-33 (in Chinese).
[5] 檀盼龍, 孫青林, 高海濤, 等. 動力翼傘系統空投風場的辨識與應用[J]. 航空學報, 2016, 37(7): 2286-2294.
TAN P L, SUN Q L, GAO H T, et al. Wind identification and application of the powered parafoil system[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(7): 2286-2294 (in Chinese).
[6] LI Y, LIN H. Theoretical investigation of gliding parachute trajectory with deadband and non-proportional automatic homing control[C]//11th AIAA Aerodynamic Decelerator Systems Technology Conference. Reston: AIAA, 1991: 42-47.
[7] ZHANG L M, GAO H T, CHEN Z Q, et al. Multi-objective global optimal parafoil homing trajectory optimization via gauss pseudospectral method[J]. Nonlinear Dynamics, 2013, 72(1-2): 1-8.
[8] TAO J, SUN Q L, ZHU E L, et al. Quantum genetic algorithm based homing trajectory planning of parafoil system[C]//34th Chinese Control Conference (CCC). Piscataway, NJ: IEEE Press, 2015: 2523-2528.
[9] SIM A G, MURRAY J E, NEUFELD D C, et al. Development and flight testing of a deployable precision landing system[J]. Journal of Aircraft, 1994, 31(5): 1101-1108.
[10] JANN T. Advanced features for autonomous parafoil guidance, navigation and control: AIAA-2005-16428[R]. Reston: AIAA, 2005.
[11] SOPPA U, STRAUCH R. GNC concept for automated landing of a large parafoil: AIAA-1997-1464[R]. Reston: AIAA, 1997.
[12] 熊菁. 翼傘系統動力學與歸航方案研究[D]. 長沙: 國防科學技術大學, 2005: 95-104.
XIONG J. Research on the dynamics and homing project of parafoil system[D]. Changsha: National University of Defense Technology, 2005: 95-104 (in Chinese).
[13] SLEGERS N J,YAKIMENKO O A.Optimal control for terminal guidance of autonomous parafoils: AIAA-2009-2958[R]. Reston: AIAA, 2009.
[14] BENJAMIN S C. Adaptive control of a 10K parafoil system: AIAA-2015-2107[R]. Reston: AIAA, 2015.
[15] KAMINER I I, YAKIMENKO O A. On the development of GNC algorithm for a high-glide payload delivery system[C]//42th IEEE Conference on Decision and Control. Piscataway, NJ: IEEE Press, 2003: 5438-5443.
[16] ZHU E L, SUN Q L, TAN P L, et al. Modeling of powered parafoil based on Kirchhoff motion equation[J]. Nonlinear Dynamics, 2015, 79(1): 617-629.
[17] 司維超, 韓維, 史瑋韋. 基于PSO算法的艦載機艦面布放調度方法研究[J]. 航空學報, 2012, 33(11): 2048-2056.
SI W C, HAN W, SHI W W. Research on dech-disposed scheduling method of carrier planes based on PSO algorithm[J]. Acta Aeronautica et Astronautica Sinica, 2012, 33(11): 2048-2056 (in Chinese).
[18] 李丁, 夏露. 改進的粒子群優化算法在氣動設計中的應用[J]. 航空學報, 2012, 33(10): 1809-1816.
LI D, XIA L. Application of improved particle swarm optimization algorithm to aerodynamic design[J]. Acta Aeronautica et Astronautica Sinica, 2012, 33(10): 1809-1816 (in Chinese).
[19] 劉玲, 鐘偉民, 錢鋒. 改進的混沌粒子群優化算法[J]. 華東理工大學學報(自然科學版), 2010, 36(2): 267-272.
LIU L, ZHONG W M, QIAN F. An improve chaos-particle swarm optimization algorithm[J]. Journal of East China University of Science and Technology (Natural Science Edition), 2010, 36(2): 267-272 (in Chinese).
[20] BREIVIK M, FOSSEN T I. Principles of guidance-based path following in 2D and 3D[C]//44th IEEE Conference on Decision and Control. Piscataway, NJ: IEEE Press, 2005: 627-634.
[21] HAN J Q. From PID to active disturbance rejection control[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900-906.
[22] GAO Z Q. Scaling and bandwidth-parameterization based controller tuning[C]//American Control Conference. Piscataway, NJ: IEEE Press, 2003: 4989-4996.
[23] ZHANG H B, WANG J K, CHEN G Q, et al. A new hybrid control scheme for an integrated helicopter and engine system[J]. Chinese Journal of Aeronautics, 2012, 25(4): 533-545.
[24] 李自行, 李高風. 移動質心再入飛行器建模及自抗擾滾動控制[J]. 航空學報, 2012, 33(11): 2121-2129.
LI Z X, LI G F. Moving centroid reentry vehicle modeling and active disturbance rejection roll control[J]. Acta Aeronautica et Astronautica Sinica, 2012, 33(11): 2121-2129 (in Chinese).
[25] 王彥雄, 祝小平, 周洲, 等. 穿越微下沖氣流的飛翼布局無人機控制方法[J]. 航空學報, 2015, 36(5): 1673-1683.
WANG Y X, ZHU X P, ZHOU Z, et al. A control method of flying wing UAV for penetration of microburst[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(5): 1673-1683 (in Chinese).
[26] 熊菁, 秦子增, 程文科. 回收過程中高空風場的特點及描述[J]. 航天返回與遙感, 2003, 24(3): 9-14.
XIONG J, QIN Z Z, CHENG W K. The characteristics and description of mid-high altitude wind in recovery[J]. Spacecraft Recovery and Remote Sensing, 2003, 24(3): 9-14 (in Chinese).
(責任編輯: 張玉, 李世秋)
URL:www.cnki.net/kcms/detail/11.1929.V.20170220.0926.002.html
Homingcontrolofparafoilsystemsinunknownwindenvironments
TAOJin1,SUNQinglin1,*,TANPanlong2,WUWannan1,CHENZengqiang1,HEYingping3
1.CollegeofComputerandControlEngineering,NankaiUniversity,Tianjin300350,China2.ElectricalEngineeringandEnergyCollege,Sino-GermanUniversityofAppliedSciences,Tianjin300191,China3.HongweiAircraftCo.,Ltd.,AviationIndustryCorporationofChina,Xiangyang441000,China
Itisimportantforparafoilsystemsinperforminghomingtasksinunknownwindenvironmentstoidentifythespeedanddirectionofthewind,soastotakeadvantageoreliminateimpactsofthewindinthehomingprocess.Torealizeaccuratehomingandflarelanding,awindidentificationmethodusingglobalpositionsystem(GPS)informationandleastsquaremethodisproposedtotheestimateunknownwinddisturbances.Amultiphasehomingtrajectoryisplannedwithconsiderationoftheinfluencesofthemeanwinds.Ahomingtrajectorytrackingcontrollerisdesignedbasedonlinearactivedisturbancerejectioncontrol(LADRC)strategytoobserveandcompensatethedisturbancesofgusts.Simulationexperimentsofhominginunknownwindyconditionsareconducted.Theresultsdemonstratethattheproposedhomingcontrolmethodisofgreatimportanceforimprovinghomingaccuracyandwindresistanceabilityofhomingofparafoilsystemsinunknownwindenvironments.
parafoilsystem;unknownwindenvironment;windidentification;homingtrajectory;trajectorytracking;linearactivedisturbancerejectioncontrol(LADRC)
2016-06-11;Revised2016-07-19;Accepted2016-09-20;Publishedonline2017-02-200926
s:NationalNaturalScienceFoundationofChina(61273138,61573197);KeyFundofTianjin(14JCZDJC39300);NationalKeyTechnologyResearchandDevelopmentProgramofChina(2015BAK06B04);KeyTechnologiesR&DProgramofTianjin(14ZCZDSF00022)
.E-mailsunql@nankai.edu.cn
2016-06-11;退修日期2016-07-19;錄用日期2016-09-20; < class="emphasis_bold">網絡出版時間
時間:2017-02-200926
www.cnki.net/kcms/detail/11.1929.V.20170220.0926.002.html
國家自然科學基金 (61273138,61573197); 天津市重點基金 (14JCZDJC39300); 國家科技支撐計劃 (2015BAK06B04); 天津市科技支撐計劃重點項目 (14ZCZDSF00022)
.E-mailsunql@nankai.edu.cn
陶金, 孫青林, 檀盼龍, 等. 翼傘系統在未知風場中的歸航控制J. 航空學報,2017,38(5):320523.TAOJ,SUNQL,TANPL,etal.HomingcontrolofparafoilsystemsinunknownwindenvironmentsJ.ActaAeronauticaetAstronauticaSinica,2017,38(5):320523.
http://hkxb.buaa.edu.cnhkxb@buaa.edu.cn
10.7527/S1000-6893.2016.0258
V249.1; TP29
A
1000-6893(2017)05-320523-11
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32